数字信号处理基础-丁玉美
合集下载
数字信号处理第三版 第一章高西全丁玉美课后答案
第 1 章
时域离散信号和时域离散系统
解线性卷积也可用Z变换法, 以及离散傅里叶变换求解, 这是后面几章的内容。 下面通过例题说明。 设x(n)=R4(n), h(n)=R4(n), 求y(n)=x(n)*h(n)。 该题是两个短序列的线性卷积, 可以用图解法(列表法) 或者解析法求解。 表1.2.1给出了图解法(列表法), 用公 式可表示为 y(n)={…, 0, 0, 1, 2, 3, 4, 3, 2, 1, 0, 0, …}
第 1 章
时域离散信号和时域离散系统
%以下为绘图部分 n=0: length(yn)-1; subplot(2, 1, 1); stem(n, yn, ′.′) xlabel(′n′); ylabel(′y(n)′) 程序运行结果如图1.3.2所示。 由图形可以看出, 5项滑 动平均滤波器对输入波形起平滑滤波作用, 将信号的第4、 8、 12、 16的序列值平滑去掉。
sin[ π(t − nT ) / T ] xa (t ) = xa (nt ) π(t − nT ) / T n = −∞
∑
∞
这是由时域离散信号理想恢复模拟信号的插值公式。
第 1 章
时域离散信号和时域离散系统
1.2 解线性卷积的方法 解线性卷积的方法
解线性卷积是数字信号处理中的重要运算。 解线性卷积有 三种方法, 即图解法(列表法)、 解析法和在计算机上用 MATLAB语言求解。 它们各有特点。 图解法(列表法)适合 于简单情况, 短序列的线性卷积, 因此考试中常用, 不容易 得到封闭解。 解析法适合于用公式表示序列的线性卷积, 得 到的是封闭解, 考试中会出现简单情况的解析法求解。 解析 法求解过程中, 关键问题是确定求和限, 求和限可以借助于 画图确定。 第三种方法适合于用计算机求解一些复杂的较难的 线性卷积, 实验中常用。
高西全-丁玉美-数字信号处理课件
拉普拉斯变换:将信号从时 域变换到复频域,便于分析 信号的稳定性和收敛性
状态空间法:通过建立系统 的状态空间模型,分析系统 的动态特性和稳定性
信号流图法:通过绘制信号 流图,分析系统的信号流和 信号处理过程
信号通过非线性系统的分析方法
非线性系统的定义和分类
非线性系统的分析方法:如微分 方程、差分方程、傅里叶变换等
添加标题
添加标题
非线性系统的特性和特点
添加标题
添加标题
非线性系统的应用实例:如通信 系统、控制系统、图像处理等
03
离散时间信号与系统分析
离散时间信号的分类与表示
连续时间信号:在连 续时间上取值的信号
离散时间信号:在离 散时间上取值的信号
连续时间信号的表示: 通常用函数表示
离散时间信号的表示: 通常用序列表示
数字信号处理课件(第三版)
单击添加副标题
汇报人:
目录
01
课件概览
02
03
离散时间信号与系统分析
04
05 数 字 信 号 处 理 系 统 性 能 评 估 与 优 化
信号与系统基础 数字信号处理算法与实现
01
课件概览
作者介绍
作者:张辉
专业领域:数字 信号处理
教育背景:清华 大学电子工程系 博士
工作经历:清华 大学电子工程系 教授,从事数字 信号处理研究多 年
离散时间信号的分类: 周期信号和非周期信
号
周期信号:在离散时 间上重复出现的信号
非周期信号:在离散 时间上不重复出现的
信号
离散时间系统的分类与描述
线性系统:输入与输出之间 存在线性关系
添加标题
时不变系统:系统的特性不 随时间变化
数字信号处理第三版课后答案丁玉美
(5) 系统是因果系统, 因为系统的输出不取决于x(n) 的未来值。 如果|x(n)|≤M, 则|y(n)|=|ex(n)|≤e|x(n)|≤eM, 因此系统
7. 设线性时不变系统的单位脉冲响应h(n)和输入序列 x(n)如题7图所示, 要求画出y(n)输出的波形。
解: 解法(一)采用列表法。
y(n)=x(n)*h(n)= x(m)h(n-m) m
有以下三种情况, 分别求出输出y(n)。
(1) h(n)=R4(n), x(n)=R5(n) (2) h(n)=2R4(n), x(n)=δ(n)-δ(n-2) (3) h(n)=0.5nu(n), xn=R5(n)
解: (1) y(n)=x(n)*h(n)=
R4(m)R5(n-m)
m
先确定求和域。 由R4(m)和R5(n-m)确定y(n)对于m的 非零区间如下:
(5)y(n)=x2(n)
(6)y(n)=x(n2)
n
(7)y(n)= x(m) m0
(8)y(n)=x(n)sin(ωn)
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
由于
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3) 1
h(n)=2δ(n)+δ(n-1)+ δ2(n-2)
x(n)*δ(n)=x(n)
x(n)*Aδ(n-k)=Ax(n-k)
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ1(n-2) 2
7. 设线性时不变系统的单位脉冲响应h(n)和输入序列 x(n)如题7图所示, 要求画出y(n)输出的波形。
解: 解法(一)采用列表法。
y(n)=x(n)*h(n)= x(m)h(n-m) m
有以下三种情况, 分别求出输出y(n)。
(1) h(n)=R4(n), x(n)=R5(n) (2) h(n)=2R4(n), x(n)=δ(n)-δ(n-2) (3) h(n)=0.5nu(n), xn=R5(n)
解: (1) y(n)=x(n)*h(n)=
R4(m)R5(n-m)
m
先确定求和域。 由R4(m)和R5(n-m)确定y(n)对于m的 非零区间如下:
(5)y(n)=x2(n)
(6)y(n)=x(n2)
n
(7)y(n)= x(m) m0
(8)y(n)=x(n)sin(ωn)
解: (1) 令输入为
输出为
x(n-n0)
y′(n)=x(n-n0)+2x(n-n0-1)+3x(n-n0-2) y(n-n0)=x(n-n0)+2x(n—n0—1)+3(n-n0-2)
由于
x(n)=-δ(n+2)+δ(n-1)+2δ(n-3) 1
h(n)=2δ(n)+δ(n-1)+ δ2(n-2)
x(n)*δ(n)=x(n)
x(n)*Aδ(n-k)=Ax(n-k)
故
第 1 章 时域离散信号和时域离散系统
y(n)=x(n)*h(n)
=x(n)*[2δ(n)+δ(n-1)+ δ1(n-2) 2
数字信号处理(丁玉美版)教案第4章

7
4.2.1 直接计算DFT的问题及改进的途径
DFT及IDFT的定义
X (k ) x (n )W
n 0
N 1
kn N
k=0, 1, …, N-1
kn N
1 x(n) N
X (k )W
k 0
N 1
n=0, 1, …, N-1
8
可见,DFT 与 IDFT 的计算成本基本相同。 直接计算N点DFT 时: 对应一个k需要N次复数乘和(N-1)次 复数加;对所有N个k值,则需要 N² 复数乘和N (N-1)次复数加 。 其中: 一次复数乘需要4次实数乘和2次实数加方能 完成。当N较大时,运算量很大。
分成四个1点的序列
24
the butterfly(蝶形运算)
2点DFT 4点DFT
x(0)
X1(0)
X(0)
x(2)
W20
-1
X1(1)
X(1)
x(1)
X2(0)
W40 W41
-1
X(2)
x(3)
W20
X2(1)
-1
-1
X(3)
1点序列的DFT就是序列本身,即不用计算
25
如N>4,则 将 x1(r) 再按r的奇偶进一步分解成两个 N/4点长的子序列:
x2(3)
0 2
W
W
0 8 1 8 2 8 3 8
34
求IFFT,也可用DIT-FFT的流程来实现。
x 3(l ) x1(2l )
N l 0,1,..., 1 4 x 4(l ) x1(2l 1)
26
X 1(k )
N / 4 1 l 0
x (2l )W
数字信号处理-丁玉美 高西全 编著-第4章
第 4 章 时域离散系统的网络结构及数字信号处理的实现
流图中的两个环路均与所有的前向通路相接触, 因此对 应于三条前向通路的Δ1=1, Δ2=1,Δ3=1。 这样可以直接写出 该流图的系统函数为
H (z) T11 T22 T33
b0 b1z 1 b2 z 2 1 a1z 1 a2 z 2
第 4 章 时域离散系统的网络结构及数字信号处理的实现
第4章 时域离散系统的网络结构及 数字信号处理的实现
4.1 教材第5章学习要点 4.2 按照系统流图求系统函数或者差分方程 4.3 按照系统函数或者差分方程画系统流图 4.4 例题 4.5 教材第 9 章学习要点 4.6 教材第 5 章习题与上机题解答
第 4 章 时域离散系统的网络结构及数字信号处理的实现
4.4 例 题
[例4.4.1] 设FIR滤波器的系统函数为 H (z) 1 (1 0.9z 1 2.1z 2 0.9z 3 z 4 ) 10
求出其单位脉冲响应, 判断是否具有线性相位, 画出直 接型结构和线性相位结构(如果存在)。
位结构, 因此并不是所有FIR系统都能形成线性相位结构。
线性相位结构的优点是能节约近一半的乘法器。
第 4 章 时域离散系统的网络结构及数字信号处理的实现
4.3.2 FIR
由频率采样定理得到公式:
H (z) 1 z N N
N1 H (k) k0 1 WNk z 1
式中, H(k)是在0~2π区间对传数函数等间隔采样N点的采样值, 可以对单位脉冲响应h(n)进行DFT得到。 这里要注意采样点 数必须大于等于h(n)的长度, 否则会发生时域混叠现象。 因 为IIR系统的单位脉冲响应是无限长的, 因此不能用频率采 样结构实现。
数字信号处理基础-丁玉美版-文档资料
k
n
0
N-1
0
N-1
DFT可以直接计算周期序列的DFS
利用DFT分析以上四种信号的频谱
基本原理
利用信号傅立叶变换具有的信号时域与频 域之间的对应关系,建立信号的DFT与四种信号 频谱之间的关系。
时域的离散化
频域周期化
时域的周期化
频域离散化
四种变换的时域与频域对应关系
x(t)
FT
0
t
~x (t)
FS
X N (e j ) X (e j ) WN (e j )
其中:WN(n)为窗函数
矩形窗
1 0 n N w[n] RN [k] 0 其它
时域波形
1 0.8 0.6 0.4 0.2
0 0
5
10
15
20
25
30
35
40
30
幅度频谱
20
10
0
-1
-0.5
0
0.5
1
矩形窗谱:
1
1
0.5
0.5
A () A ()
0
0
0.2 p 0.4 p 0.6 p 0.8 p p
M=60
0
0 0.2 p 0.4 p 0.6 p 0.8 p p
M=14
常用窗函数特性
窗函数类型
矩形
Hann
Hamming
Blackman
Kaiser(
)
5.86
主瓣宽度 4p / N 8p / N 8p / N 12p / N 10p / N
旁瓣峰值衰耗 (dB) -13
-31
-41
-57
-57
数字信号处理-时域离散随机信号处理(丁玉美)第2章
rxx (0) rxx (0) Rxx r ( M 1) xx
第二章 维纳滤波和卡尔曼滤波 (2.2.22)式可以写成矩阵的形式, 即
Rxd Rxxh
对上式求逆,得到
h Rxx1Rxd
(2.2.23)
(2.2.24)
第二章 维纳滤波和卡尔曼滤波 上式表明已知期望信号与观测数据的互相关函数及观测 数据的自相关函数时,可以通过矩阵求逆运算, 得到维纳滤
E[| e(n) |2 ] E[| e(n) |2 ] j 0 a j b j
记
j=0, 1, 2, … (2.2.6)
j j a j b j
j=0, 1, 2, …
(2.2.7)
第二章 维纳滤波和卡尔曼滤波 则(2.2.6)式可以写为
j E[| e(n) |2 ] 0
j 0
(2.2.16)
假定滤波器工作于最佳状态,滤波器的输出yopt(n)与期望信号d(n) 的误差为eopt(n),把(2.2.15)式代入上式,得到
* E[ yopt (n)eopt (n)] 0
(2.2.17)
第二章 维纳滤波和卡尔曼滤波
d(n) eo pt(n)
yo pt(n)
图 2.2.1 期望信号、 估计值与误差信号的几何关系
方法求解,简单易行,具有一定的工程实用价值,并且物理概
念清楚,但不能实时处理;维纳滤波的最大缺点是仅适用于一 维平稳随机信号。这是由于采用频域设计法所造成的, 因此人 们逐渐转向在时域内直接设计最佳滤波器的方法。
第二章 维纳滤波和卡尔曼滤波
2.2 维纳滤波器的离散形式——时域解
2.2.1 维纳滤波器时域求解的方法 根据线性系统的基本理论,并考虑到系统的因果性,可以 得到滤波器的输出y(n),
数字信号处理第二版(丁玉美) 西安电子科技大学出版社
第1章 时域离散信号和时域离散系统 章
(2) 2π/ ω0不是整数,是一个有理数时,设2π/ ω0 =P/Q,式中P、Q是互为素数的整数,取k=Q,那么N=P, 则正弦序列是以P为周期的周期序列。例如sin(4/5)πn, ω0 =(4/5)π,2π/ ω0 =5/2,k=2,该正弦序列是以5为周 期的周期序列。 (3)2π/ ω0 是无理数,任何整数k都不能使N为正整 数,因此,此时的正弦序列不是周期序列。例如, ω0 =1/4,sin(ω0 n)即不是周期序列。对于复指数序列ejω0 n 的周期性也有同样的分析结果。
第1章 时域离散信号和时域离散系统 章
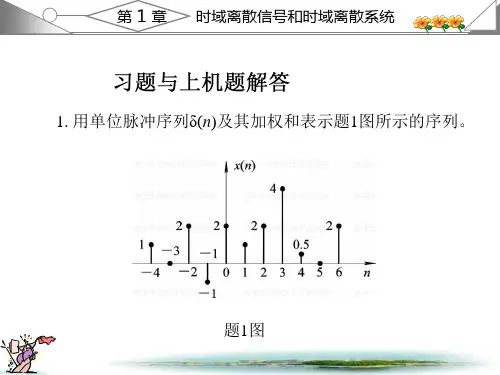
信号随n的变化规律可以用公式表示,也可以用图 形表示。如果x(n)是通过观测得到的一组离散数据,则 其可以用集合符号表示,例如: x(n)={…1.3,2.5,3.3,1.9,0,4.1…}
第1章 时域离散信号和时域离散系统 章
1.2.1 常用的典型序列 1. 单位采样序列δ(n) 1,n=0 0,n≠0 (1.2.3)
t = nT
= xa ( nT ),
−∞< n<∞
(1.2.1)
第1章 时域离散信号和时域离散系统 章
这里n取整数。对于不同的n值, xa(nT)是一个有 序的数字序列:… xa(-T)、 xa(0)、 xa(T)…,该数字序列 就是时域离散信号。实际信号处理中,这些数字序列 值按顺序放在存贮器中,此时nT代表的是前后顺序。 为简化,采样间隔可以不写,形成x(n)信号,x(n)可以 称为序列。对于具体信号,x(n)也代表第n个序列值。 需要说明的是,这里n取整数,非整数时无定义,另外, 在数值上它等于信号的采样值,即 x(n)=xa(nT), -∞<n<∞(1.2.2)
数字信号处理-丁玉美 高西全 编著-第5章
第5章
无限脉冲响应(IIR)数字滤波器的设 计
因为 | H (e jc ) |2 1/ 2 , 所以ωc又称为滤波器的半功率 点。 因此, 设计数字滤波器时, 应根据指标参数及对滤
波特性的要求, 选择合适的滤波器类型(巴特沃斯、 切比
雪夫、 椭圆滤波器等)和设计方法(脉冲响应不变法、 双 线性变换法、 直接法等)进行设计。 IIR数字滤波器的设计 既可以从模拟滤波器的设计入手进行, 也可以直接根据数 字滤波器指标参数, 直接调用滤波器设计子程序或函数 进行。
道, 设计巴特沃斯滤波器时, 对于3 dB截止频率λc进行归
一化最方便。
第5章
无限脉冲响应(IIR)数字滤波器的设 计
图5.1.5中①、 ②、 ③、 ④对应的4组频率变换公式:
p 频率变换公式: p 归一化低通边界频率: 1, s p s p
第5章
无限脉冲响应(IIR)数字滤波器的设 计
由图5.1.5很容易看出各种实际AF指标参数的符号和含 义, 以及向箭头方向转换的有关公式。 由于四种实际H(jΩ)
向G(jλ)转换的公式较多, 所以图中用①、 ②、 ③和④表
示, 它们分别代表以下四组频率变换公式。 为了简化计算, 一般取λp=1, 这时的G(p)称为归一化低通滤波器, λ为归 一化频率。 当然, 也可以根据需要, 对于其他频率(如 λs或λc)进行归一化。 根据教材中模拟滤波器的设计原理知
第5章
无限脉冲响应(IIR)数字滤波器的设 计
采样数字滤波系统的设计指标一般由采样数字滤波系统 的等效模拟滤波器Ha(jΩ)的指标给出。 所以设计这种滤波系 统, 其关键是由Ha(jΩ)指标确定其中的数字滤波器 H(ejω)的指标。 可以证明, H(ejω)与Ha(jΩ)具有如下关系:
丁玉美-数字信号处理-绪论
数字信号处理
Digital Signal Processing
课程教材:丁玉美,高西全.数字信号 处理(第五版).西安电子科技大学出信号和时域离散系统 时域离散信号和系统的频域分析 离散傅里叶变换 快速傅里叶变换(FFT) 时域离散系统的基本网络结构与状态变 量分析法 无限脉冲响应数字滤波器的设计 有限脉冲响应数字滤波器的设计
绪论
一、信号的定义
举例: • 古代通讯方式:烽火、旗语、信号灯; • 战场上的信号弹、吹战号等。 • 生活中:红绿灯、闹钟的铃声、婴儿的啼哭声。 • 近代通讯方式:电报、电话、无线电等 • 现代通讯方式:计算机、网络、卫星传输 、移动 通讯等
消息(massage)是指表示信息的语言、文字、图
像和数据等。
信号分析和处理的数学基础
法国数学家傅立叶(Fourier)在1822年《热的解析 理论》论文中提出,将以2π为周期的周期函数f(x) 展开为无穷多个正弦和余弦函数之和,即
其中
此为著名的傅立叶级数,
称为f(x)的Fourier系数。
信号分析和处理的数学基础
周期为2π函数
傅里叶级数
任意周期函数
傅里叶积分
信息(Information)是指人类社会和自然界中需要
传送、交换、存储和提取的抽象内容。
信号(signal)是指运载消息的光、声、电等物理量。
它是传递信息的一个行动或一个东西,通常不用文来 表示。
信息与消息的关系:
信息包含在消息之中,是通信系统中传送的对象 消息≠信息,同一消息可含有不同的信息量
非周期函数
信号分析和处理
信号处理分为模拟信号处理和数字信号处理。 模拟信号处理是通过电子线路实现的; 数字信号处理是通过计算机来实现的。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
H(e j ) H(z) ze j
22
差分方程和系统函数
M
N
y(n) bk x[n k] ak y[n k]
k 0
k 1
M
H (z)
Y (z) X (z)
bk z k
k0 N 1 ak zk
k 1
ak =0时,系统称FIR(finite impulse response)
ak不全为零时,系统称为IIR(infinite impulse response)
N 1
X (z)
n0
z n
1 zN 1 z 1
z 0
16
2) 右边序列
X (z) x[n]zn n N1
z R
例:x[n] anu[n]
X (z)
n0
an z n
1 1 az1
za
17
3) 左边序列
N2
X (z) x[n]zn
n
z R
例:x[n] bnu[n 1]
1
X (z)
T xT (t)e jk0t dt
x[n] X (e j ) x[n]e jn n
•定义:当输入 x[n] M x, 输出满足 y[n] M y
LTI系统稳定的充分必要条件 h[n] n
9
离散系统的频域分析
10
离散系统的频率响应
DTFT(h[n]) H (e j ) H (e j ) e j()
H (e j ) : magnitude response
() phase response
2. 单位阶跃序列
3. 矩形序列
定义:
u[n]
1 0
n0 n0
1 0 n N 1 RN [n] 0 otherwise
3
4. 指数序列 x[n] an , n Z
anu[n]: 右边指数序列, anu[-n]: 左边指数序列,
5. 虚指数序列(单频序列)
|a| 1序列有
界
|a| 1序列有
p
p
c2 c1 c1 c2
理想带阻滤波器
14
离散系统z域分析
15
z变换定义及收敛域
X (z) x[n]zn n
收敛域(ROC): R-< |z|<R+
1) 有限长序列 N2
X (z) x[n]zn
ROC 0 z
n N1
例:x[n]
1 0
0 n N 1
其它
RN [n]
n
单位圆
Im(z)
H(z)的收敛域包含单位圆
单位圆
Im(z)
Re(z)
Re(z)
稳定因果系统
非稳定非因果系统
20
单位圆
Im(z)
Re(z)
稳定非因果系统
21
系统函数(transfer function,system function)
对LTI系统: y[n] = x[n]*h[n] 由z变换的性质:Y(z)=X(z) H(z) H(z)称为LTI离散系统的系统函数 当H(z) ROC包含单位圆时
27
4.离散时间周期信号 ~x[n]
~x[n]
X~[k ]
N
1
~x[n]e
j
2p
N
k
n
n0 ~x [ n ]
-N
...
X~0[ k ]
N
n
...
-N
0
N
图4 离散周期信号及其频谱
k
28
问题:如何利用数字方法分析信号的频谱?
x(t) X ( j) x(t)ejtdt
1
xT (t) X (k0 ) T
数字信号处理基础
1.1 离散时间信号与系统 1.2 数字滤波器的结构
1
离散信号(序列)的表示
2 x[n]
1
1
1
2
n
-1
0
1
3
-1 n0
x[n] {1, 1 ,2,1,1}
x [n]={1, 1, 2, -1, 1; n=-1,0,1,2,3}
2
常用序列
1. 单位脉冲序列
定义:
[n]
1 0
n0 n0
11
y[n] x[n] h[n]
Y (e j ) H (e j ) X (e j )
12
理想数字滤波器
H LP (e j ) 1
p c
c p
理想低通滤波器
H HP (e j)
1
p c
c p
理想高通滤波器
13
H BP (e j) 1
p
p
c2 c1 c1 c2
理想带通滤波器
H BS (e j) 1
23
利用DFT分析信号频谱
一、四种信号频谱之间的关系 二、利用DFT分析连续非周期信号频谱 三、混叠现象、泄漏现象、栅栏现象 四、DFT参数选取
24
1.连续时间非周期信号 x(t)
x(t) X ( j) x(t)ejtdt x(t) X(j)
0
t
0
图1 连续非周期信号及其频谱
25
2. 连续时间周期信号 xT (t)
bnzn bnzn
n
n1
b1z 1 b1z
1 1 bz 1
zb
18
4) 双边序列
X (z) x[n]zn n
例:x[n] anu[n] bnu[n 1]
X
(z)
1
1 az 1
1 1 bz1
ROC R z R a z b
19
系统的稳定性和H(z)
LTI系统稳定的充要条件:
h[n]
2) 位移
x[n] x[n-N]
3) 抽取(decimation)
4) 插值(interpolation)
5) 卷积
y[n] x[n] h[n]
y[n] x[m]h[n m] m
卷积的计算
6
离散系统
x [n]
离散时 间系统
y[n]
输入序列
输出序列
y[n] = T{x[n]}
7
系统分类
1. 线性(Linearity)
T{ax1[n] bx2[n]} aT{x1[n]} bT{x2[n]}
2.时不变(Time-Invatiance) 定义:如T{x [n]}=y[n],则T{x [n-m]}=y[n-m] 线性时不变系统简称为:LTI
8
3. 因果性(Causality) 定义:系统n时刻的输出只和n时刻及以前的输入有关 4. 稳定性
xT
(t)
X
(k0 )
1 T
T xT (t)e jk0t dt
x T(t)
X(n 0)
-T
0
T
t
0
图2 连续周期信号及其频谱
26
3.离散时间非周期信号 x[n]
x[n] X (e j ) x[n]e jn n
x[n]
X(ej )
...
...
0
n
2p p
0 p 2p
图3 离散非周期信号及其频谱
界
x(t) e jt
角频率为 的模拟信号
x[n] x(t) tnT e jTn e jn
数字角频率 w =T W
4
6.余弦型序列
x[n] cos n (e jn e jn ) / 2 x[n] sin n (e jn e jn ) / j2
5
序列的基本运算
1) 翻转(time reversal) x[n]x[-n]
22
差分方程和系统函数
M
N
y(n) bk x[n k] ak y[n k]
k 0
k 1
M
H (z)
Y (z) X (z)
bk z k
k0 N 1 ak zk
k 1
ak =0时,系统称FIR(finite impulse response)
ak不全为零时,系统称为IIR(infinite impulse response)
N 1
X (z)
n0
z n
1 zN 1 z 1
z 0
16
2) 右边序列
X (z) x[n]zn n N1
z R
例:x[n] anu[n]
X (z)
n0
an z n
1 1 az1
za
17
3) 左边序列
N2
X (z) x[n]zn
n
z R
例:x[n] bnu[n 1]
1
X (z)
T xT (t)e jk0t dt
x[n] X (e j ) x[n]e jn n
•定义:当输入 x[n] M x, 输出满足 y[n] M y
LTI系统稳定的充分必要条件 h[n] n
9
离散系统的频域分析
10
离散系统的频率响应
DTFT(h[n]) H (e j ) H (e j ) e j()
H (e j ) : magnitude response
() phase response
2. 单位阶跃序列
3. 矩形序列
定义:
u[n]
1 0
n0 n0
1 0 n N 1 RN [n] 0 otherwise
3
4. 指数序列 x[n] an , n Z
anu[n]: 右边指数序列, anu[-n]: 左边指数序列,
5. 虚指数序列(单频序列)
|a| 1序列有
界
|a| 1序列有
p
p
c2 c1 c1 c2
理想带阻滤波器
14
离散系统z域分析
15
z变换定义及收敛域
X (z) x[n]zn n
收敛域(ROC): R-< |z|<R+
1) 有限长序列 N2
X (z) x[n]zn
ROC 0 z
n N1
例:x[n]
1 0
0 n N 1
其它
RN [n]
n
单位圆
Im(z)
H(z)的收敛域包含单位圆
单位圆
Im(z)
Re(z)
Re(z)
稳定因果系统
非稳定非因果系统
20
单位圆
Im(z)
Re(z)
稳定非因果系统
21
系统函数(transfer function,system function)
对LTI系统: y[n] = x[n]*h[n] 由z变换的性质:Y(z)=X(z) H(z) H(z)称为LTI离散系统的系统函数 当H(z) ROC包含单位圆时
27
4.离散时间周期信号 ~x[n]
~x[n]
X~[k ]
N
1
~x[n]e
j
2p
N
k
n
n0 ~x [ n ]
-N
...
X~0[ k ]
N
n
...
-N
0
N
图4 离散周期信号及其频谱
k
28
问题:如何利用数字方法分析信号的频谱?
x(t) X ( j) x(t)ejtdt
1
xT (t) X (k0 ) T
数字信号处理基础
1.1 离散时间信号与系统 1.2 数字滤波器的结构
1
离散信号(序列)的表示
2 x[n]
1
1
1
2
n
-1
0
1
3
-1 n0
x[n] {1, 1 ,2,1,1}
x [n]={1, 1, 2, -1, 1; n=-1,0,1,2,3}
2
常用序列
1. 单位脉冲序列
定义:
[n]
1 0
n0 n0
11
y[n] x[n] h[n]
Y (e j ) H (e j ) X (e j )
12
理想数字滤波器
H LP (e j ) 1
p c
c p
理想低通滤波器
H HP (e j)
1
p c
c p
理想高通滤波器
13
H BP (e j) 1
p
p
c2 c1 c1 c2
理想带通滤波器
H BS (e j) 1
23
利用DFT分析信号频谱
一、四种信号频谱之间的关系 二、利用DFT分析连续非周期信号频谱 三、混叠现象、泄漏现象、栅栏现象 四、DFT参数选取
24
1.连续时间非周期信号 x(t)
x(t) X ( j) x(t)ejtdt x(t) X(j)
0
t
0
图1 连续非周期信号及其频谱
25
2. 连续时间周期信号 xT (t)
bnzn bnzn
n
n1
b1z 1 b1z
1 1 bz 1
zb
18
4) 双边序列
X (z) x[n]zn n
例:x[n] anu[n] bnu[n 1]
X
(z)
1
1 az 1
1 1 bz1
ROC R z R a z b
19
系统的稳定性和H(z)
LTI系统稳定的充要条件:
h[n]
2) 位移
x[n] x[n-N]
3) 抽取(decimation)
4) 插值(interpolation)
5) 卷积
y[n] x[n] h[n]
y[n] x[m]h[n m] m
卷积的计算
6
离散系统
x [n]
离散时 间系统
y[n]
输入序列
输出序列
y[n] = T{x[n]}
7
系统分类
1. 线性(Linearity)
T{ax1[n] bx2[n]} aT{x1[n]} bT{x2[n]}
2.时不变(Time-Invatiance) 定义:如T{x [n]}=y[n],则T{x [n-m]}=y[n-m] 线性时不变系统简称为:LTI
8
3. 因果性(Causality) 定义:系统n时刻的输出只和n时刻及以前的输入有关 4. 稳定性
xT
(t)
X
(k0 )
1 T
T xT (t)e jk0t dt
x T(t)
X(n 0)
-T
0
T
t
0
图2 连续周期信号及其频谱
26
3.离散时间非周期信号 x[n]
x[n] X (e j ) x[n]e jn n
x[n]
X(ej )
...
...
0
n
2p p
0 p 2p
图3 离散非周期信号及其频谱
界
x(t) e jt
角频率为 的模拟信号
x[n] x(t) tnT e jTn e jn
数字角频率 w =T W
4
6.余弦型序列
x[n] cos n (e jn e jn ) / 2 x[n] sin n (e jn e jn ) / j2
5
序列的基本运算
1) 翻转(time reversal) x[n]x[-n]