轮系 (1) -轮系的类型及特点
§11—1轮系及分类

三、轮系的传动比(Transmission Ratio)
一对齿轮的传动比:是指两轮的角速度或转速之比,即 i12=ω1 /ω2= n1 /n2 = z2 /z1。 轮系的传动比:是指轮系中的输入轴(首构件)和输出轴 (末构件)的角速度或转速之比。
计算轮系传动比时,包括: 1)计算轮系传动比的大小; 2)确定输入轴(首构件)和输出轴(末构件)的转 向关系。 下面来介绍各种轮系的传动比的计算,这是这章的重点。
▲ 单一的定轴轮系或周转轮系称为基本轮系。
图11-3
3、复合轮系(Combined Gear Train) : 由定轴轮系和周转轮系组成或由几个周转轮系组成的 轮系。 如图11-4的轮系:定轴轮系和周转轮系; 如图11-5的轮系:2个周转轮系(每一个行星架对应于一 个周转轮系)。
图11-4
图11-5
H2 1ຫໍສະໝຸດ Oω3 ωH ω1
2
H
3
O
1
3
齿轮2一方面绕自己的轴线O1O1回转,另一方面又随 着构件H一起绕固定轴线OO回转,就象行星的运动一样,
兼有自转和公转,故称齿轮2为行星轮;
装有行星轮2的构件H称为行星架(转臂或系杆)。 ∴ 1个周转轮系=1个行星架+1个(或几个)行星轮 +1~2个太阳轮
其中:太阳轮和行星架常作为运动的输入和输出构件,称
自由度F=1,原动件数为1,其中有一个太阳轮被固定。
H
2 1
O
3
图11-2 b)
2)周转轮系根据基本构件的不同,可分为: (太阳轮用K表示,行星架用H表示) 2K-H型(图11-2):基本构件是2个太阳轮,1个行星架。 实际机械中用得较多。 3K型(图11-3):基本构件是3个太阳轮,H只起支持行 星轮的作用,不是输入输出构件。
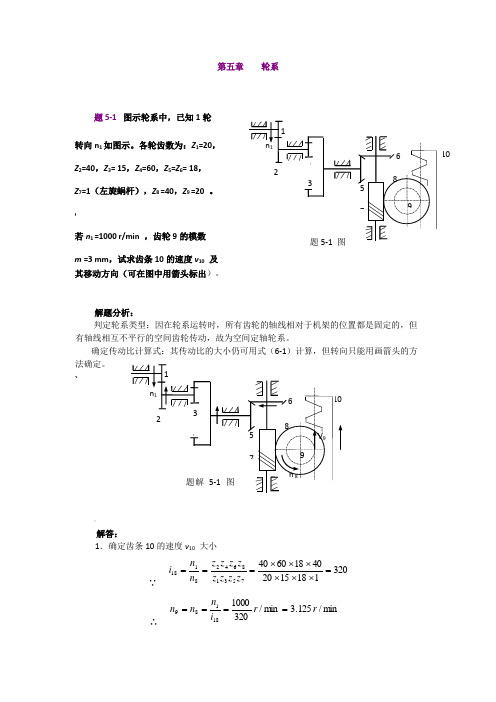
第五章 轮系题5-1 图示轮系中,已知1轮
80 2 40
nH = 20 r/min 与 n1 转向相同。 3.当 nH = 0 时,求 n3 :当 nH = 0 时,图示轮系成为定轴轮系,所以
i13
n1 n3
z3 z1
80 40
2
n3
i13
140 2
r / min
70r / min
即 n3 与 n1 转向相反
题 5-4 图示为锥齿轮组成的周转轮系。已知:Z1 =Z2=17, Z2′= 30,Z3= 45 ,若 1 轮 转速 n1 =200 r/min 。
d 9 n 9 60
mz9 n9 60
3 20 3.125 mm / s 9.82mm / s 60
2.确定齿条 10 移动方向根据圆柱齿轮传动、锥齿轮传动及蜗杆传动的转向关系,可
定出蜗轮转向 n8 为逆时针方向,齿轮 9 与蜗轮 8 同轴,n9 = n8,齿条 10 线速度 v10 与 9 轮线
解答:
&
i14 1.定轴轮系 1-2-3-4 传动比计算式:
n1 n4
12
z2 z4 z1 z3
34 36 20 18
3.4
2.差动轮系 5-6-7-H 转化轮系传动比计算式:
i5H7
n5H n7H
n5 nH n7 nH
1 z6 z7 z5 z6
26 1 78 3
3.建立两基本轮系之间的联系:∵ 轮 1 和轮 7 共轴,∴ n7 = n1
r1 + r2 = r3 - r2 r3 = r1 + 2r2 mz3 = mz1 + 2mz2 z3 = z1 + 2z2 = 40 + 2×20 = 80
2.当 n3 = -40r/min 时,求 nH
机械设计基础--第3章轮系1

ω2
ωH
1
3
1
3
轮1、3和系杆作定 轴转动
ω1
施加-ω H后系杆成为机架,原轮系转化为定轴轮系
齿轮1,3 :绕固定的轴线回转 中心轮 central gear 齿轮2 :自转+公转 行星轮 planet gear
H : 支承行星轮并使其公转的支架 转臂 crank arm 回转中心必须与中心轮轴线重合
二、传动比符号的确定 两种方法:
ω1 1
转向相反 ω2
p 转向相同 p vp
2 1.用“+” “-”表 vp 示 适用于平面定轴轮系(轴线平行,
ω1
1 2
ω2
两轮转向不是相同就是相反)。 外啮合齿轮:两轮转向相反,用“-”表示;
每一对外齿轮反向一次考 内啮合齿轮:两轮转向相同,用“+”表示。 虑方向时有
1 2 3 H
2 H 1
n1 n2 n3 nH
nH 1 = n1 - nH nH 2 = n2 - nH nH 3 = n 3 - nH nH H = n H - nH = 0
回
顾
• 斜齿轮共轭齿廓曲面的形成,斜齿轮正 确啮合条件、几何尺寸计算(分度圆直 径、中心距); • 斜齿轮传动重合度与直齿轮的差异; • 斜齿轮当量齿数; • 圆锥齿轮齿廓曲面和当量齿数。
第三章
轮
系
§3-1 轮系的类型 §3-2 定轴轮系及其传动比 §3-3 周转轮系及其传动比
§3-4 复合轮系及其传动比 §3-5 轮系的应用
§3-6 几种特殊的行星传动简介
§ 3- 1
轮系的类型
定义:由一系列两两啮合的齿轮组成的传动系统- 简称轮系
4-1 轮系传动的应用与转向的判定

(3)中பைடு நூலகம்轮 )
在行星轮系传动中, 在行星轮系传动中,与行星轮相啮合 且轴线位置固定的齿轮称为中心轮, 且轴线位置固定的齿轮称为中心轮,用符 表示。 号K表示。通常将外齿中心轮称为太阳轮, 表示 通常将外齿中心轮称为太阳轮, 用符号a表示 将内齿中心轮称为内齿圈, 表示; 用符号 表示;将内齿中心轮称为内齿圈, 用符号b表示 表示。 用符号 表示。
第4章 轮系传动
4.1
轮系的应用与分类
4.2
行星轮系
4.1 轮系传动的分类与应用 4.1.1 轮系传动的分类
由多对齿轮所组成的传动系统称为齿 轮系,简称轮系。 轮系,简称轮系。 按照传动时各齿轮的轴线位置是否固 定,轮系分为定轴轮系和行星轮系两种基 本类型。 本类型。传动时所有齿轮的几何轴线位置 均固定不变,这种轮系统称为定轴轮系。 均固定不变,这种轮系统称为定轴轮系。
图4-1 定轴轮系
传动时齿轮g的几何轴线绕齿轮 、 和 传动时齿轮 的几何轴线绕齿轮a、b和 的几何轴线绕齿轮 构件H的共同轴线转动 的共同轴线转动, 构件 的共同轴线转动,这样的轮系统称 为行星轮系。 为行星轮系。
图4-2 行星轮系
4.1.2轮系的功用 4.1.2轮系的功用
1.实现相距较远的两轴间运动和动 . 力的传递 2.实现分路传动 . 3.实现变速传动 . 4.获得较大的传动比 . 5.实现运动的合成和分解 .
4.2.2 行星轮系的特点
(1)用作运动的合成 ) (2)用作运动的分解 )
4.2 行星轮系 4.2.1 行星轮系的组成
行星轮系有以下三种基本构件。 行星轮系有以下三种基本构件。
(1)行星轮 )
行星轮即作行星运动的齿轮,用符号 行星轮即作行星运动的齿轮,用符号g 表示。 表示。
第五章 轮系 1
= (1)2
Z2Z3 Z1Z 2
周转轮系 :
iH
31
=
w3 w1
wH wH
= (1) Z1 Z3
33
输入
3'
2
2' 4
H
13
1'
输出
i13
=
w1 w3
= (1)2
Z2Z3 Z1Z 2
iH
31
= w3 wH w1 wH
= (1) Z1 Z3
3、找出轮系之间的运动关系
w1 w3
= =
w1 w3
= 300
37
§5.4 轮系的功能
实现大传动比传动 一对齿轮传动,一般传动比不得大于5~7,有需要获 得更大传动比时,可利用定轴轮系的多级传动,也可 以采用周转轮系和复合轮系传动来实现。 如
38
实现变速和换向传动 ❖ 双联齿轮变速机构
39
❖ 车床走刀丝杠的三星轮换向机构
40
实现多分路传动 利用定轴轮系,可以通过主动轴上的若干齿轮分 别把运动传给多个工作部件,从而实现分路传动
巨大变化,甚至转向也会改变
行星轮系传动比正负是计算出来的,而不是判断出来的 31
混合轮系的传动比
在计算混合轮系传动比时,既不能将整个轮系作为定轴 轮系来处理,也不能对整个机构采用转化机构的办法 计算混合轮系传动比的正确方法 ❖ 首先将各个基本轮系正确地区分开来
❖ 分别列出计算各基本轮系传动比的方程式
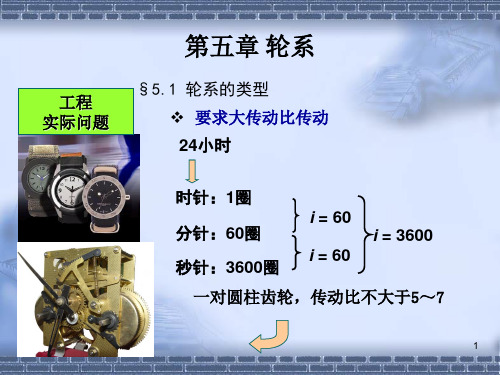
第五章 轮系
工程 实际问题
§5.1 轮系的类型 ❖ 要求大传动比传动 24小时
时针:1圈 分针:60圈 秒针:3600圈
i = 60 i = 3600
i = 60
轮系的类型和应用.

H
5 1
H1
H2
1
3
3
4
6
轮系的功用
1、实现相距较远的两轴之间的传动
2.实现分路传动
IV
VI
V
主轴
滚齿机上实现滚刀与轮坯范成运动 的传动简图。
3.实现变速传动
a) 1
2
b)
B 5
A
2
H
6 1’
4
1
2’
3
4.实现换向传动
a)
1
b)
1
2 4
a
3
2
3
5、实现大速比和大功率传动 行星轮系可以由很少几个齿轮获得很大的 传动比,如下图中,若z1=100,z2=101, z2′=100,z3=99,可以求得从系杆到轮1的传 动比
轮系运转时,至少有一个齿轮的几何轴线绕其他 固定轴线作回转运动。
二、周转轮系:
2
4
H O
O
基本周转轮系的组成: 3 1、行星轮: 几何轴线是运动的,至少有一个或有多个。 2、中心轮(太阳轮): 与行星轮啮合的齿轮,用“K”表示。最多有两个; 特殊时有一个。 3、系杆(转臂): 支持行星轮的构件.用“H”表示。只有一个。
§6-1
轮系类型:
轮系的类型和应用
轮系:由一系列齿轮组
成的齿轮传动系统。 一、定轴轮系: 在轮系运转时,其各 轮轴线相对机架的位置都 是固定的。如图示。
1、平面定轴轮系:
在定轴轮系中,所有齿轮的轴线均平行;
2、空间定轴轮系:
在定轴轮系中,所有齿轮的轴线不都平行。 1 2 3 4 5 6 7
1
2 3 4
4 13
轮系1轮系有哪些功能答由单对齿轮组成的齿轮机构功能
第7章 轮系1. 轮系有哪些功能?答:由单对齿轮组成的齿轮机构功能单一,不能满足工程上的复杂要求,故常采用若干对齿轮,组成轮系来完成传动要求。
轮系广泛用于各种机械设备中,其功用如下:(1)传递相距较远的两轴间的运动和动力(2)可获得大的传动比(3)可实现变速传动(4)变向传动(5) 运动合成、分解2. 图示为锥齿轮组成的周转轮系。
已知:Z 1 =Z 2=17, Z 2′= 30,Z 3= 45 , 1轮转速n 1 =200 r/min 。
确定系杆的转速n H 的大小和转向;解:系杆转速n H 大小,确定n H 的转向因为H H n n 13和 同向,故其转化轮系传动比公式:5.130174517021321313113=⨯⨯==--=--=='z z z z n n n n n n n n n i H H H H H H H400min /5.0200min /5.11200113111-=-=-=-==r r i n i n n H H H r/minn H 的转向:因i 1H 为“-”值,所以n H 与n 1转向相反。
3.m /503r n =解:22,1'-齿轮1和 设:n i 所以,系杆4. 在图示传动装置中,已知各轮齿数为:z 1=20, z 2=40, z 3=20, z 4=30, z 5=80,运动从Ⅰ轴输入,Ⅱ轴输出,n Ⅰ=1000r/min,转动方向如图所示。
试求输出轴Ⅱ的转速n Ⅱ及转动方向。
解:这是一个混合轮系:齿轮3、4、5和系杆H 组成一个行星轮系;齿轮1、2组成一个定轴轮系。
对于3、4、5、H 组成的行星轮系,有i 35355380204H H H n n n n z z =---=-=- 将n 5=0代入上式得 n n n H H 34--=- 即 n n H3=1+4=5 ……………(1) 对于1、2齿轮组成的定轴轮系,有i 12122140202=-=-=-n n z z 即n n 12=-2…………(2) 联立解(1)、(2)式,并考虑到n Ⅰ=n 1, n 2=n H ,n 3=n Ⅱ得n n II I =-52 将n Ⅰ=1000r/min 代入,得n Ⅱ=-2500r/min 负号说明n Ⅱ转向与n Ⅰ转向相反。
轮系1
机械基础部分
3
61
3 2 O2 H OH 1
2
H
3
O2
H
OH O3 O1
H
1
2 O1
1
O3
3
2H
O2 2 O1 1 O1 O3
3
2 O2 H
3H
O3
1H
1
机械基础部分
周转轮系转化机构中各构件的角速度
构件代号 1 2 3 H 原角速度 在转化机构中的角速度 (相对于系杆的角速度)
z z H i 1 2 3 H z 1 z 2
68 机械基础部分 例2 图示轮系, 已 知 z115 , z225 , z220 , z360 , n1200rmin , n350rmin ,试求系杆 H 的转速 nH 的大小和方 向,⑴ n1、n3转向相同时;⑵ n1、n3转向相反时。
机械基础部分
27
推广:
设首轮A的转速为n1,末轮K的转速为nK,m为圆柱齿轮外啮合 的对数,则平面定轴轮系的传动比可写为:
1 n1 m 所有从动轮齿数的乘积 i1k ( 1) k nk 所有主动轮齿数的乘积
机械基础部分
28
推广:
设首轮A的转速为n1,末轮K的转速为nK,m为圆柱齿轮外啮合 的对数,则平面定轴轮系的传动比可写为:
62
1 2 3
1H1H 2H2H 3H3H
H
HHHH =0
周转轮系中所有基本构件的回转轴共线,可以根据周 转轮系的转化机构写出三个基本构件的角速度与其齿数之 间的比值关系式。已知两个基本构件的角速度向量的大小 和方向时,可以计算出第三个基本构件角速度的大小和方 向。
1 n1 i1k k nk
7-5-1 《轮系》练习题(一)
☼7-5-1《轮系》练习题(一)☼班级姓名学号一、填空题:1、平面定轴轮系传动比的大小等于;从动轮的回转方向可用方法来确定。
2、所谓定轴轮系是指。
3、所谓周转轮系是指。
4、蜗轮的转向不仅与的转向有关,而且与其方向有关。
5、在轮系的传动中,有一种不影响传动比大小,只起改变转向作用的齿轮,我们把它称为。
6、差动轮系的自由度是,行星轮系的自由度是。
在周转轮系中,轴线固定的齿轮称为;兼有自转和公转的齿轮称为。
7、基本周转轮系是由、、组成。
8、在复合轮系传动比计算中,应正确区分各个轮系,其关键在于。
9、在周转轮系传动比计算中,运用相对运动的原理,将周转轮系转化成假想的定轴轮系方法称为。
10、汽车后桥差速器是作分解运动的应用。
二、选择题:1、轮系可以分为()两种类型。
A、定轴轮系和差动轮系B、差动轮系和行星轮系C、定轴轮系和复合轮系D、定轴轮系和周转轮系2、差动轮系的自由度为()。
A、1B、2C、3D、43、行星轮系的自由度为()。
A、1B、2C、3D、44、在定轴轮系中,设轮1为起始主动轮,轮N为最末从动轮,则定轴轮系始末两轮传动比数=()。
值计算的一般公式是i1nA、轮1至轮N间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积B、轮1至轮N间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积C、轮N至轮1间所有从动轮齿数的乘积 / 轮1至轮N间所有主动轮齿数的乘积D、轮N至轮1间所有主动轮齿数的乘积 / 轮1至轮N间所有从动轮齿数的乘积A 、i H mn =(n m —n H )/(n n —n H )B 、i H mn =(n n —n H )/(n m —n H )C 、i Hmn =(n H —n n )/(n m —n n ) D 、i Hmn =(n m —n n )/(n n —n H ) 6、基本周转轮系是由( )构成。
A 、行星轮和中心轮B 、行星轮、惰轮和中心轮C 、行星轮、行星架和中心轮D 、行星轮、惰轮和行星架 7、下列四项功能中,哪几项( )可以通过轮系的运用得以实现。
汽车轮系
2.2 共轭齿廓,共轭曲线
凡满足齿廓啮合基本定律的一对齿轮的齿廓称共轭齿廓, 共轭齿廓的齿廓曲线称为共轭曲线
2.3 齿廓曲线的选择
1.满足定传动比的要求;2.考虑设计、制造等方面。
通常采用渐开线、摆线、变态摆线
3 渐开线及渐开线齿廓
3.1 渐开线的形成及性质
1)形成 当一直线n-n沿一个圆的圆周作纯滚 动时,直线上任一点K的轨迹 AK——渐开线 基圆,rb n-n:发生线 θK:渐开线AK段的展角
N'1 K'
'
cos cos r1 r2 (r1 r2 ) a a cos cos
2 O'2
a a, , r1 r1 , r2 r2 , c c
——有侧隙
r2 r'2
3)传动比
1 r2 rb 2 r2 z 2 i12 常数 2 r1 rb1 r1 z1
计算混合轮系传动比的正确方法是: (1) 首先将各个基本轮系正确地区分开来 (2) 分别列出计算各基本轮系传动比的方程式。 (3) 找出各基本轮系之间的联系。 (4) 将各基本轮系传动比方程式联立求解,即可求得混 合轮系的传动比。
t m K K t
n
N1 N2
rK
K A1 1 rb1 O1 2
A3
A2
n0
m
∞
O
∞ O3
n
rb
K
∞
n0
N
N
K
A
3
O2 rb2
3.2 渐开线方程
渐开线方程
rb rK cos K K inv K tg K K
4 渐开线齿廓满足齿廓啮合基本定律
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
4
汽车后桥差速器的轮系 可根据转弯半径大小自 动分解,nH使n1 、n3 符合转弯的要求
轮系的传动特点
5、分路传动
利用定轴轮系, 可通过主动轴上的若 干齿轮分别把运动传 给多个工作部位,从 而实现分路传动。如 滚齿机工作台中的传 动机构。
轮系的传动特点
6、实现结构紧凑的大功率传动
❖ 在周转轮系中,多采用 多个行星轮的结构形式 ,各行星轮均匀地分布 在中心轮四周。
齿轮与轴之间的关系
固定(齿轮与轴固定为一体, 齿轮与轴一同转动,齿轮不 能沿轴向移动)
结构简图
单一齿轮
双联齿轮
空套(齿轮与轴空套,齿轮 与轴各自转动,互不影响)
滑移(齿轮与轴周向固定, 齿轮与轴一同转动,但齿轮 可沿轴向滑移)
轮系的类型
根据轮系在运转过程中,各齿轮的几何轴线在空 间的相对位置是否变化,可以将轮系分为三大类:
锥齿轮换向
轮系的传动特点
车床走刀丝杠三星轮换向机构
汽 车 变 速 箱
轮系的传动特点
汽车齿轮变速箱
IV
I
III II
轮系的传动特点
三、实现远距离传动
轮系的传动特点
4、可合成或分解运动(周转轮系)
合成
分解
轮系的传动特点
4、可合成或分解运动
2
1
3
5
H 2
H
13
行星架H的转速是轮 1、3转速的合成。
❖
机械基础
轮系
轮系
主动轮
从动轮
一对圆柱齿轮,传动比不大于5~7
轮系
12小时
时针:1圈 分针:12圈 秒针:720圈
i = 12 i = 60
i = 720
问题:大传动比传动
轮系 问题:变速、换向
轮系 轮系:由一系列彼此啮合的齿轮组成的传动机构,
用于原动机和执行机构之间的运动和动力传递。
齿轮在轴上的固定方式
行星轮
中心轮
行星架
轮系的类型
行星轮系
差动轮系
混合轮系
由定轴轮系和周转轮系、或几部分周转轮系组成 的复杂轮系
定轴轮系
周转轮系
周转轮系I 周转轮系II
返回
课 堂 练 习:
判断下面各轮系的类型
1.图示轮系属于( ) A.平面定轴轮系 B.周转轮系 C.混合轮系 D.空间定轴轮系
课堂练习:
2.图示轮系属于( ) A.定轴轮系 B.周转轮系 C.混合轮系
➢ 定轴轮系 ➢ 周转轮系 ➢ 混合轮系
轮系的类型
一、定轴轮系 轮系运转过程中,所有齿轮轴线的几何位置都相 对机架固定不动
平面定轴轮系 (各轴线均相互平行)
空间定轴轮系 (各轴线不都相互平行)
轮系的类型
定轴轮系运动简图
轮 系的类型
二、周转轮系
在轮系运转过程中,至少有一个齿轮轴线的几何位置不 固定,而是绕着其它定轴齿轮的轴线回转
iH1
Байду номын сангаас
H 1
1 i1H
10000
i14=6x7=4
2
轮系的传动特点
二、实现变速、换向
滑移齿轮 变速
1-3和5-7为双联滑移齿轮
8
6
2
4
D2
5
7
1
3
D1 n 1443r / min
n电
D1 Ⅰ
D2
z1
z2
Ⅱ
z3
z4
Ⅲ
Ⅱ
2条
2条 Ⅰ
1条
z5
z6
z7
Ⅲ(nⅢ )
z8
轮系的传动特点
换向 利 用 惰 轮 换 向
课堂练习:
3.图示轮系属于( ) A.定轴轮系 B.周转轮系 C.混合轮系
课堂练习:
4.图示轮系属于( ) A.定轴轮系 B.周转轮系 C.混合轮系
轮系的传动特点
1、获得大的传动比 2、实现变速换向运动 3、实现远距离传动 4、实现运动的合成与分解
轮系的传动特点
1、获得大的传动比
一对齿轮啮合传动比一般为 3—5,最大不超过7
❖ 这样,载荷由多对齿轮 承受,可大大提高承载 能力;又因多个行星轮 均匀分布,可大大改善 受力状况此外,采用内 啮合又有效地利用了空 间,加之其输入轴与输 出轴共线,可减小径向 尺寸。因此可在结构紧 凑的条件下,实现大功 率传动。
本章小结
定轴轮系是基础,重点掌握转向判断; 周转轮系传动比计算难点:转化轮系; 混合轮系传动比计算关键:基本轮系的划分 本章习题:5-3,5-6,5-12