轮系及其分类
轮系的分类、传动比、及相关计算
定轴轮系+周转轮系
周转轮系+周转轮系
混合轮系传动比计算步骤
问题:能否通过对整个轮系 加上一个公共角速度 (-ωH) 来计算轮系的传动比?
1)首先将各个基本轮系正确的区分出来;
2)分别列出计算各个基本轮系传动比的方程式;
3)找出各个基本轮系之间的联系; 4)将各基本轮系传动比方程式联立求解。
内啮合,齿轮1、 齿轮2转向相同
外啮合,齿轮 1、齿轮2转向 相反
外啮合
内啮合
3、定轴轮系传动比的确定
n2 n2' z3 n1 z2 i23 i12 n3 n3 z2' n2 z1
z5 n4 n3 n3’ z4 i45 i34 n5 z4 n4 n4 z‘ 3
n3
n n
H 1
H 3
n4
n4 z z 3 ( 1 )2 5 6 n4 450 rpm n6 z4 z5 4 n4 nH
n4的转向与n1相同。
1250 450 ( ) 17 n3 450 ( ) 9
空间周转轮系
定轴轮系
得:n3=26.47 与n1、n6同向
例题07
n1 nH 18 70 1.875 0 nH 28 24
n1 1 1.875 nH
i1H
n1 1 1.875 2.875 nH
例2、周转轮系及其传动比
图示差动轮系中,设已知各轮齿数为Z1=15,Z2=25, Z2'=20,Z3=60;又n1=200r/min,n3=50r/min,当:(1)n1 与n3转向相同时;(2)n1与n3转向相反时,求系杆H的转速 nH的大小和方向。 H
iMH i9 12
轮系及其分类
轮系及其分类轮系是指由轮胎、轮毂、轮辋、轴、轴承等组成的整体装置。
它是汽车、摩托车、自行车等交通工具的重要部件之一,也是保证车辆正常行驶的关键。
轮系的分类有很多种,按照用途可分为汽车轮系、自行车轮系、摩托车轮系等;按照结构可分为实心轮系和空心轮系;按照轴承形式可分为滚动轮系和滑动轮系。
首先来看汽车轮系。
汽车轮系由轮胎、轮毂、轮辋、轴和轴承组成。
轮胎是汽车与地面接触的部分,承担着支撑车身、缓冲震动、提供牵引力、保证操控稳定性等重要功能。
轮毂是连接轮胎和车轴的部件,起到支撑和传递动力的作用。
轮辋是轮毂的外部保护罩,能够有效保护轮毂和轮胎。
轴是轮系的主要承载部件,起到连接车轮的作用。
轴承则是支撑轴的关键部件,能够减小摩擦、降低能耗,保证车轮正常旋转。
自行车轮系与汽车轮系的结构相似,但规模更小。
自行车轮系由轮胎、轮毂、轮辋、轴和轴承组成。
轮胎是自行车与地面接触的部分,承担着支撑车身、缓冲震动、提供牵引力、保证操控稳定性等重要功能。
轮毂是连接轮胎和车轴的部件,起到支撑和传递动力的作用。
轮辋是轮毂的外部保护罩,能够有效保护轮毂和轮胎。
轴是轮系的主要承载部件,起到连接车轮的作用。
轴承则是支撑轴的关键部件,能够减小摩擦、降低能耗,保证车轮正常旋转。
摩托车轮系与汽车轮系的结构也相似,但摩托车轮系通常更为简单。
摩托车轮系由轮胎、轮毂、轮辋、轴和轴承组成。
轮胎是摩托车与地面接触的部分,承担着支撑车身、缓冲震动、提供牵引力、保证操控稳定性等重要功能。
轮毂是连接轮胎和车轴的部件,起到支撑和传递动力的作用。
轮辋是轮毂的外部保护罩,能够有效保护轮毂和轮胎。
轴是轮系的主要承载部件,起到连接车轮的作用。
轴承则是支撑轴的关键部件,能够减小摩擦、降低能耗,保证车轮正常旋转。
轮系还可以按照结构形式进行分类,主要分为实心轮系和空心轮系。
实心轮系是指轮胎和轮辋为一体的结构,常见于一些小型车辆和农业机械。
空心轮系是指轮辋中间为空的结构,常见于汽车、摩托车和自行车等交通工具。
§11—1轮系及分类

三、轮系的传动比(Transmission Ratio)
一对齿轮的传动比:是指两轮的角速度或转速之比,即 i12=ω1 /ω2= n1 /n2 = z2 /z1。 轮系的传动比:是指轮系中的输入轴(首构件)和输出轴 (末构件)的角速度或转速之比。
计算轮系传动比时,包括: 1)计算轮系传动比的大小; 2)确定输入轴(首构件)和输出轴(末构件)的转 向关系。 下面来介绍各种轮系的传动比的计算,这是这章的重点。
▲ 单一的定轴轮系或周转轮系称为基本轮系。
图11-3
3、复合轮系(Combined Gear Train) : 由定轴轮系和周转轮系组成或由几个周转轮系组成的 轮系。 如图11-4的轮系:定轴轮系和周转轮系; 如图11-5的轮系:2个周转轮系(每一个行星架对应于一 个周转轮系)。
图11-4
图11-5
H2 1ຫໍສະໝຸດ Oω3 ωH ω1
2
H
3
O
1
3
齿轮2一方面绕自己的轴线O1O1回转,另一方面又随 着构件H一起绕固定轴线OO回转,就象行星的运动一样,
兼有自转和公转,故称齿轮2为行星轮;
装有行星轮2的构件H称为行星架(转臂或系杆)。 ∴ 1个周转轮系=1个行星架+1个(或几个)行星轮 +1~2个太阳轮
其中:太阳轮和行星架常作为运动的输入和输出构件,称
自由度F=1,原动件数为1,其中有一个太阳轮被固定。
H
2 1
O
3
图11-2 b)
2)周转轮系根据基本构件的不同,可分为: (太阳轮用K表示,行星架用H表示) 2K-H型(图11-2):基本构件是2个太阳轮,1个行星架。 实际机械中用得较多。 3K型(图11-3):基本构件是3个太阳轮,H只起支持行 星轮的作用,不是输入输出构件。
第6章 轮系
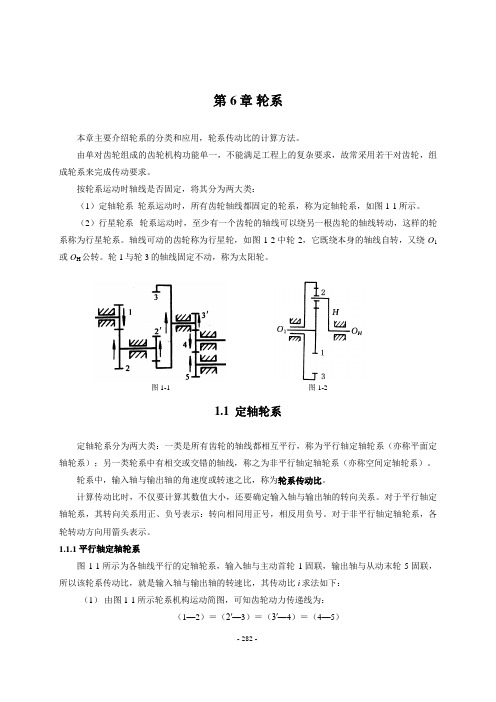
第6章轮系本章主要介绍轮系的分类和应用,轮系传动比的计算方法。
由单对齿轮组成的齿轮机构功能单一,不能满足工程上的复杂要求,故常采用若干对齿轮,组成轮系来完成传动要求。
按轮系运动时轴线是否固定,将其分为两大类:(1)定轴轮系轮系运动时,所有齿轮轴线都固定的轮系,称为定轴轮系,如图1-1所示。
(2)行星轮系轮系运动时,至少有一个齿轮的轴线可以绕另一根齿轮的轴线转动,这样的轮系称为行星轮系。
轴线可动的齿轮称为行星轮,如图1-2中轮2,它既绕本身的轴线自转,又绕O1或O H公转。
轮1与轮3的轴线固定不动,称为太阳轮。
图1-1图1-21.1 定轴轮系定轴轮系分为两大类:一类是所有齿轮的轴线都相互平行,称为平行轴定轴轮系(亦称平面定轴轮系);另一类轮系中有相交或交错的轴线,称之为非平行轴定轴轮系(亦称空间定轴轮系)。
轮系中,输入轴与输出轴的角速度或转速之比,称为轮系传动比。
计算传动比时,不仅要计算其数值大小,还要确定输入轴与输出轴的转向关系。
对于平行轴定轴轮系,其转向关系用正、负号表示:转向相同用正号,相反用负号。
对于非平行轴定轴轮系,各轮转动方向用箭头表示。
1.1.1 平行轴定轴轮系图1-1所示为各轴线平行的定轴轮系,输入轴与主动首轮1固联,输出轴与从动末轮5固联,所以该轮系传动比,就是输入轴与输出轴的转速比,其传动比i求法如下:(1)由图1-1所示轮系机构运动简图,可知齿轮动力传递线为:(1—2)=(2′—3)=(3′—4)=(4—5)上式括号内是一对啮合齿轮,其中轮1、2′、3′、4为主动轮,2、3、4、5为从动轮;以 “—”所联两轮表示啮合,以“=”所联两轮同轴运转,它们的转速相等。
(2) 传动比i 的大小()4543321245342312354433221511i i i i z z z z z z z zn n n n n n n n n n i ⋅⋅⋅=⋅⋅⋅-=⋅⋅⋅=='''''' 上式表明,该定轴齿轮系的传动比等于各对啮合齿轮传动比的连乘积,也等于各对啮合齿轮中各从动轮齿数的连乘积与各主动轮齿数的连乘积之比,其正负号取决于轮系中外啮合齿轮的对数。
轮系
i1H =1-(-99×101/100×100)=1.9999 iH1=n H / n 1 =1/i1H =0.5
表示行星架H与齿轮1的转向相同。
用画箭头法标出转化轮系中各构件的转向关系,如图所示。
29
例: 如图所示周转轮系。已知Z1=15, Z2=25, Z3=20, Z4=60,n1=200r/min, n4=50r/min ,且两太阳轮1、4 转向相反。试求行星架转速n H及行星轮转速n3。
2 O1 H
1
3
3
2
n 2
H
n
O
H
n
1
1
n 3 -n H
2
3
H 1
3 2
n3H = n 3-n H n2H = n 2-n H H n1H = n 1-n H
1
a) 原周转轮系
b) 原周转轮系的转化轮系
周转轮系及转化轮系中各构件的转速
构件名称 原来的转速
太阳轮1
n1
行星轮2
n2
太阳轮3
n3
行星架H
nH
转化轮系中的转速
n1H=n1-nH
n2H=n2-nH n3H=n3-n H nHH=nH-nH=0
18
2.周转轮系的传动比计算
周转轮系的传动比(3/5)
转化轮系中,齿轮1对齿轮3的传动比
i1H3
n1H n3H
n1 nH n3 nH
z2 z3 z1 z2
一般表达式为 :
iG HKnnG K H H
n4
= n1 3000 i14 120
=25r/min, 转向如图
周转轮系的传动比(1/5)
5.3 周转轮系及其传动比计算
轮系的分类、传动比、及相关计算
加-ωH
构件 原来的转速 1 n1 2 n2 3 n3
转化轮系中的转速 n1H=n1-nH n2H=n2-nH n3H=n3-nH
“-”表示在 转化轮系中齿轮 1和3的转向n1H、 n3H相反,并不
H
nH
nHH=nH-nH=0
H z 2 z3 n1 n1 nH H i13 H n3 n3 nH z1 z2
例3、空间周转轮系传动比计算
已知轮系中各轮齿数为z1=48,z2=48,z2’=18,z3=24, n1=250r/min,n3= 100r/min ,转向如图中实线箭头所示。 试求系杆的转速nH的大小及方向。 解: 划箭头得,转化轮系中 齿轮1、3的转向相反。
z 2 z3 n1 nH ' n3 nH z1 z2
如图所示为滚齿机差动传动机构。已知齿轮1、2、3的齿 数为Z1=Z2=Z3=30,蜗杆4为单头(左旋),蜗轮5的齿数为 Z5=30。当离合器M1、M2接合时,齿轮3的转向如图所示(分齿 运动),转速n3=100rpm;蜗杆4顺时针方向回转(附加运动), 转速n4=2rpm。试求此时齿轮1传给工作台的转速n1。
n1 100 1 z 2 z3 ( 1 ) 2.5 n3 z1 z2 40 n4 nH 1 z5 z6 ( 1 ) 2.5 n6 nH z4 z5 n3 n4 , n6 0
联立求解,得:
i1H
n1 8.75 nH
例题03
在图示轮系中 ,已知Z1=17,Z2=20,Z3=85,Z4=18, Z5=24,Z6=21,Z7=63,求: (1)当n1=10001r/min,n4=10000r/min时,np=? (2)当n1=n4时,np=? (3)当n1=10000r/min,n4=10001r/min时,np=? 解:
轮系及计算
一、轮系及其分类
轮系
1、定轴轮系 2、周转轮系
1、定轴齿轮系
在传动时所有齿轮的回转轴线固定不变齿轮系,称为定轴齿轮系。
2、周转轮系
至少有一个轮的轴线绕中心轴线转动的轮系称为周转轮系
行星齿轮系中,既绕自身轴线自转又绕另一固定轴线公转的齿轮2形象的称为行 星轮。支承行星轮作自转并带动行星轮作公转的构件H称为行星架。轴线固定的 齿轮1为太阳轮,齿轮3则称为齿圈。
(1)2 Z2Z3 Z1Z 2
3 H1 ; Z2 Z3
i H1
12
1 H1 2 H1
(辛1)1普ZZ12森式a自动12变速33器结构示意图
i H2
13
1 H2 3 H2
(1)1 Z3 Z1
a
The endຫໍສະໝຸດ 二、定轴轮系传动比计算传动比计算
大小 方向(与输入同向为正,异向为负)
1、传动比的大小
所有从动轮齿数的乘积 i 所有主动轮齿数的乘积
2、输出轴转向的表示 方法1、仅当所有轴线都平行时
i
1 5
(1)m
所有从动轮齿数的乘积 所有主动轮齿数的乘积
方法2、用箭头表示
m——外啮合的次数
外啮合:尖对尖;背靠背(空间啮合除外)
i13H
1 H 3 H
(1)2 Z2 * Z3 Z1 Z2'
3 0
1
(1
Z2 Z1
*
Z3 Z 2'
)H
iH 1
H 1
1 1 Z2 * Z3
1
1 101 99
10000
Z1 Z2'
100 100
2' 2
H
1
3
轮系及其分类
H—系杆A 或行星架
4
周转轮系的分类
1. 根据周转轮系所具有的自由度数目不同
(1)行星轮系
周转轮系中,若将中心轮3(或1)固定,则整 个轮系的自由度为1。这种自由度为1的周转轮 系称为行星轮系。为了确定该轮系的运动,只需 要给定轮系中一个构件以独立的运动规律即可。
(2)差动轮系
周转轮系中,若中心轮1和3均不固定,则整个 轮系的自由度为2。这种自由度为2的周转轮系 称为差动轮系。为了使其具有确定的运动,需要 两个原动件。
假想给整个轮系加上一
个公共的角速度(-H),
据相对运动原理,各构 件之间的相对运动关系 并不改变,但此时系杆
的角速度就变成了H-H=0,即系杆可视为静止不动。于 是,周转轮系就转化成了一个假想的定轴轮系,通常称这 个假想的定轴轮系为周转轮系的转化机构。
以单排2K-H型周转轮系为例
i1H3 1 3H H 1 3 H H(1)Z Z1 3
第六章 轮系
A
1
§6-1 轮系及其分类
轮系是由一系列齿轮所组成的传动装置。 定义:这种由一系列齿轮组成的传动系统称为
轮系。 它通常介于原动机和执行机构之间,把原动机
的运动和动力传给执行机构。 工程实际中常用其实现变速、换向和大功率传
动等,具有非常广泛的应用。 轮系的类型 定轴轮系 周转轮系 混合轮系
2、首末两轴不平行
用箭头表示
A
8
3、所有轴线都平行
i
1 5
(1)m
所有从动轮齿数的乘积 所有主动轮齿数的乘积
m——外啮合的次数
4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴 线互相平行
仍可在传动比的计算结果中加上"+"、"-"号来表示主、 从动轮的转向关系。
第五章轮 系
2’ n1 n1
H
H 3 n3H
n3
i
H 13
=
z z n1 − nH 48 × 24 4 =− 2 3 =− =− n3 − nH z1 z 2 ' 48 × 18 3
1
n1 − nH 250 − nH 4 = =− n3 − nH − 100 − nH 3
解得:nH =
讨论:是否可以将n1代为负,n3代为正? 试算,分析结果 nH=-50 r/min
i 12
ω1 z2 = =− ω2 z1
一对内啮合圆柱齿轮传动两 轮的转向相同, 轮的转向相同,其传动比前 应加“ 号 应加“+”号
z3 ω2 i23 = =+ z2 ω3
该轮系中有3对外啮 该轮系中有 对外啮 合齿轮, 合齿轮,则其传动比 公式前应加(− 公式前应加 −1)3
i 15
昆明理工大学现代教育技术中心
1 2 3 H H H H H
(<0, 负号机构) n1H n1 − nH Z 2 Z3 Z3 H = − Z1 Z 2 = − Z i13 = H = 1 (>0, 正号机构) n3 n3 − nH 对于F=1的行星轮系,若n3=0, 有 i1H
z3 = 1− i = 1+ z1
H 13
中间轮/过轮 :Z2,只改变转向不影响传动比的大小。
定轴轮系传动比的数值等于组成该轮系的各对
啮合齿轮传动比的连乘积,也等于各对齿轮中 所有从动轮齿数的乘积与所有主动轮齿数乘积 之比。
昆明理工大学现代教育技术中心
பைடு நூலகம்
一般定轴轮系的传动比计算公式
i GJ nG m 从 G 到 J 所有从动轮齿数连乘积 = = ( − 1) nJ 从 G 到 J所有主动轮齿数连乘积
轮系
5、结构小、重量轻时,可实现大功率传动
图7-8所示的周转轮系,在同一圆周上均匀布着三个行星轮。整个 轮系的承载能力得到了提高,而齿轮的尺寸却较小;同时,行星轮 公转产生的惯性力也得到了相应的平衡,这个轮系特别适合于飞行 器。
图7-8 周转轮系
§2 定轴轮系传动比
一、定轴轮系的传动比
轮系的传动比是指轮系中,输入轴与输出轴的角速度(或转速)之 比。轮系传动比的计算,包括计算传动比的大小,以及确定两轴的 相对转动方向。 一对圆柱齿轮传动比可用下式表示
例 如图所示的周转轮系中,各齿轮齿数为z1=27,z2=17,z3=61,转 速n1=6000r/min,转向为顺时针。求传动比i1H和和行星架H的转速 nH、行星轮2的转速n2及它们的转向。 解:
设顺时针转向为正,根据公式代入数据得
解得nH=1840r/min 正号说明轮1和行星架的转向相同,都为顺时针
采用行星轮系,可以在使用较少齿轮的情况下,得到很大的传动比。
图7-4
图7-5
4、实现运动的合成和分解
运动的合成是将两个输入运动合为一个输出运动;运动的分解是将 一个输入运动分为两个输出运动。运动的合成和分解都可用差动轮 系实现。
(1)运动的合成 如图11-6所示的加法机构,其运动的合成常采用 锥齿轮组成的差动轮系来实现。一般取z1=z3,则可得到nH=n1+n3, 说明输出构件(行星架H)的运动是两个输入构件(齿轮1和3)运 动的合成。这种合成运动广泛用于机床、计算机构等机械装置中。 (2)运动的分解 图11-7所示是汽车后桥差速器,其中由齿轮1、2、 3和4(行星架H )组成的主体部分与图11-7所示轮系相同,是差动 轮系。 图7-7 汽车后桥 差速器 图7-6 加法机构
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
(1)Z1 Z3
3、找出轮系之间的运动关系
1 3
1 3
-
3'
2
2' 4
13
H
输出
1'
4、联立求解:
i1H
1 H
Z1
Z 3 Z1
1 Z1Z2Z3
Z2Z3
例6:
电动卷扬机减速器 Z1=24,Z2=48,Z2'=30, Z3=90,Z3'=20,Z4=30, Z5=80,求i1H
(H,5为一整体) H
2、首末两轴不平行
用箭头表示
-
3、所有轴线都平行
i
1 5
(1)m
所有从动轮齿数的乘积 所有主动轮齿数的乘积
m——外啮合的次数
4、所有齿轮的几何轴线不都平行,但首、尾两轮的轴 线互相平行
仍可在传动比的计算结果中加上"+"、"-"号来表示主、 从动轮的转向关系。
-
§6-3 周转轮系传动比
反转法
假想给整个轮系加上一
-
例4:在图所示的轮系中,设已知各轮的齿数为:
试求轴Ⅰ、轴Ⅱ之间的传动比。 解:这是一个混合轮系。
(1)首先区分各个基本轮系: 1-2-3-H 周转轮系
4-4‘-5-1’-3‘ 定轴轮系 (2)分别列出各基本轮系传动 比的计算式:
在1-2-3-H 中
即
(a)
-
在4-4‘-5-1’-3‘ 中 (3)联系条件
第六章 轮系
-
§6-1 轮系及其分类
轮系是由一系列齿轮所组成的传动装置。 定义:这种由一系列齿轮组成的传动系统称为
轮系。 它通常介于原动机和执行机构之间,把原动机
的运动和动力传给执行机构。 工程实际中常用其实现变速、换向和大功率传
动等,具有非常广泛的应用。 轮系的类型 定轴轮系 周转轮系 混合轮系
H
1
3
周转轮系传动比正负是计算出来的,而不是判断出来的。
-
例2: 下图所示的轮系中,已知各轮的齿数为: 试求传动比i1H
解:这是一个双排2K-H型行星轮系。 其转化机构的传动比为
由于3=0,故得 计算结果i1H为正值,说明系杆与中心轮1转向相同。
-
例3: 如下图所示的轮系中,已知各轮的齿数为: , 又n1=250r/min
个公共的角速度(-H),
据相对运动原理,各构 件之间的相对运动关系 并不改变,但此时系杆 的角速度就变成了H-H=0,即系杆可视为静止不动。于 是,周转轮系就转化成了一个假想的定轴轮系,通常称这 个假想的定轴轮系为周转轮系的转化机构。
以单排2K-H型周转轮系为例
i1H3 1 3H H 1 3 H H(1)Z Z1 3
计算混合轮系传动比的正确方法是:
(1) 首先将各个基本轮系正确地区分开来。 (2) 分别列出计算各基本轮系传动比的方程式。 (3) 找出各基本轮系之间的联系。 (4) 将各基本轮系传动比方程式联立求解,即可求得 混合轮系的传动比。
-
具体划分方法: 先找行星轮,即找出那些几何轴线位置不固定而是绕其 它定轴齿轮几何轴线转动的齿轮;找到行星轮后,支承 行星轮的构件即为系杆;而几何轴线与系杆重合且直接 与行星轮相啮合的定轴齿轮就是中心轮。 这一由行星轮、系杆、中心轮所组成的轮系,就是一个 基本的周转轮系。区分各个基本的周转轮系后,剩余的 那些由定轴齿轮所组成的部分就是定轴轮系。
从而可求得
(b) (c)
代入(a)式得
负号表明Ⅰ、Ⅱ两轴转向相反
-
例5:已知各轮齿数, 求传动比i1H
1、分析轮系的组成 1,2,2',3——定轴轮系 输 入
1',4,3',H——周转轮系
2、分别写出各轮系的传动比
定轴轮系 :
i13 13
(1)2
Z2Z3 Z1Z2
周转轮系
:
iH
31
13 H H
转向如图所示。试求系杆的转速nH的大小和方向。
解:这是一个由锥齿轮所组成的 周转轮系。先计算其转化机构的 传动比。
已知值代与齿轮3相反。
-
§6-4 复合轮系传动比
在计算混合轮系传动比时,既不能将整个轮系作为定轴 轮系来处理,也不能对整个机构采用转化机构的办法。
角速度(或转速)之比,即:
2、一对齿轮的传动比
i12
1 2
z2 z1
正号:表示转向相同,用于内啮合
负号:表示转向相反,用于外啮合
-
3、传动比大小的计算
举例说明传动比计算
定轴轮系传动比 所 所有 有主 从动 动轮 轮齿 齿数 数的 的乘 乘积 积
●主、从动轮转向关系的确 定
1、首末两轴平行,用“+”、“-”表 示。 4——惰轮 不改变传动比的大小, 但改变轮系的转向
-
1、定轴轮系
定义:组成轮系的所有齿 轮几何轴线的位置在运转 过程中均固定不变的轮系, 称为定轴轮系,又称为普 通轮系。
定轴轮系的动画
-
2、周转轮系 定义:组成轮系的齿轮中至少有一个齿轮几
何轴线的位置不固定,而是绕着其它定轴 齿轮轴线回转的轮系,称为周转轮系。
轮1与轮3 轴线重合
周转轮系组成:
2—行星轮 1、3—中心轮 H—系杆- 或行星架
-
周转轮系转化机构传动比的一般公式:
iA HB B A H H B A H Hf(z)
例1:图示为一大传动比的减速器, Z1=100,Z2=101,Z2'=100,Z3=99 求:输入件H对输出件1的传动比iH1
iH1
1 i1H
111019910000
100100
若Z1=99 iH1 100
2' 2
3
2
2'
1
(一)1,2-2',3,H——周转轮系
5 4
3' H为输出件
3',4,5——定轴轮系
(二)
i1H3 1 3 H H
(1)Z2Z3 Z1Z2
i35
3 5
Z5 Z3
(三)
3 H
3 5
周转轮系的分类
1. 根据周转轮系所具有的自由度数目不同
(1)行星轮系
周转轮系中,若将中心轮3(或1)固定,则整 个轮系的自由度为1。这种自由度为1的周转轮 系称为行星轮系。为了确定该轮系的运动,只需 要给定轮系中一个构件以独立的运动规律即可。
(2)差动轮系
周转轮系中,若中心轮1和3均不固定,则整个 轮系的自由度为2。这种自由度为2的周转轮系 称为差动轮系。为了使其具有确定的运动,需要 两个原动件。
-
2. 根据周转轮系中基本构件的不同 (1)2K- H型周转轮系 (2)3K型周转轮系
单排式 双排式
具有三个中心轮 的周转轮系
双排式
一个周转轮系由行星轮、系杆和中 心轮等几部分组成,其中,中心轮 和系杆的运转轴线重合。
-
§6-2 定轴轮系的传动比
1、传动比定义 轮系中输入轴的角速度(或转速)与输出轴的