单片机跑马灯c语言程序
单片机闪烁灯跑马灯控制课程设计
单片机闪烁灯跑马灯控制课程设计单片机闪烁灯跑马灯控制课程设计报告一、引言本课程设计旨在通过学习和实践单片机(MCU)编程,实现闪烁灯和跑马灯的控制。
我们将使用嵌入式C语言编程,通过了解单片机的内部结构、电路设计和编程流程,深入理解单片机的工作原理和应用。
二、系统硬件设计本课程设计选用51单片机作为主控芯片,外接8个LED灯和1个按键。
硬件电路设计如下:1.单片机:采用AT89C51,该芯片具有32K字节的Flash存储器,256字节的RAM,以及两个16位定时器/计数器。
2.LED灯:采用普通LED灯珠,与单片机引脚相连,通过编程控制LED灯的亮灭状态。
3.按键:采用机械按键,与单片机的外部中断0(EX0)相连,用于触发闪烁灯和跑马灯的切换。
三、系统软件设计1.闪烁灯模式:在此模式下,8个LED灯将按照一定的频率交替闪烁。
我们可以通过计时器和GPIO口控制LED灯的亮灭状态。
void blink_LED(void) {int i;while(1) {for(i = 0; i < 8; i++) {P1_0 = ~P1_0; // 翻转LED状态delay(500); // 延时,控制闪烁频率}}}2.跑马灯模式:在此模式下,8个LED灯将按照一定的顺序依次点亮。
我们可以通过计时器和GPIO口控制LED灯的亮灭状态。
void marquee_LED(void) {int i;int led_state[8] = {0, 1, 0, 1, 0, 1, 0, 1}; // LED状态数组,初始为交替亮灭while(1) {for(i = 0; i < 8; i++) {P1_0 = led_state[i]; // 设置LED状态delay(50); // 延时,控制跑马灯速度}}}四、按键处理程序我们通过外部中断0(EX0)接收按键信号,当按键按下时,将切换闪烁灯和跑马灯模式。
按键处理程序如下:void EX0_ISR(void) interrupt 0 { // EX0中断服务程序if (key_flag) { // 如果按键已经被按下过if (key_value == 0) { // 如果按键状态为低电平marquee_LED(); // 切换到跑马灯模式key_flag = 0; // 标记按键状态已经改变} else { // 如果按键状态为高电平blink_LED(); // 切换到闪烁灯模式key_flag = 0; // 标记按键状态已经改变}key_value = ~key_value; // 翻转按键状态值} else { // 如果按键还没有被按下过key_value = ~key_value; // 翻转按键状态值if (key_value == 0) { // 如果按键状态为低电平blink_LED(); // 切换到闪烁灯模式key_flag = 1; // 标记按键状态已经改变} else { // 如果按键状态为高电平marquee_LED(); // 切换到跑马灯模式key_flag = 1; // 标记按键状态已经改变}}}。
跑马灯
基于C51单片机的跑马灯程序设计本文由仇看风雨贡献/************ 单片机学习板V1.0 ********************//*功能描述:跑马灯练习 */*//*功能:控制学习板上的8个LED显示 *//*接外部晶振11.0592 MHZ *//**************************************************///P0口控制8个LED 把学习板上的4位拨码开关的 1 拨到ON#include <reg51.h>#include <stdio.h>#define uchar unsigned char#define uint unsigned int#define ulong unsigned longvoid delay(unsigned int count);//延时程序void led_display(void);//LED显示子程序//数据模式 LED_DATA[0]显示次数 LED_DATA[1]显示速度LED_DATA[2]-[18]显示数据uchar codeLED_DATA1[18]={3,50,0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80,0 x40,0x20,0x10,0x08,0x04,0x02,0x01,0x00};//弹跳灯uchar codeLED_DATA2[18]={5,120,0xC3,0x66,0x3C,0x18,0x18,0x3C,0x66,0xC3, 0xC3,0x66,0x3C,0x18,0x18,0x3C,0x66,0xC3};//双灯对撞模式uchar codeLED_DATA3[18]={5,80,0x00,0x81,0xc3,0xe7,0xff,0xe7,0xc3,0x81,0 x00,0x81,0xc3,0xe7,0xff,0xe7,0xc3,0x81};//拉链模式uchar codeLED_DATA4[18]={3,50,0x01,0x03,0x07,0x0F,0x1F,0x3F,0x7F,0xFF,0 xFE,0xFC,0xF8,0xF0,0xE0,0xC0,0x80,0x00};//LED灯柱uchar codeLED_DATA5[18]={3,100,0x55,0xaa,0x55,0xaa,0x55,0xaa,0x55,0xaa, 0x55,0xaa,0x55,0xaa,0x55,0xaa,0x55,0xaa};//动感灯uchar codeLED_DATA6[18]={10,40,0xFF,0x00,0xFF,0x00,0xAA,0x00,0x55,0x00, 0x2A,0x00,0x54,0x28,0x00,0x28,0x00,0x10};//特殊爆闪uchar codeLED_DATA7[18]={10,50,0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00, 0xff,0x00,0xff,0x00,0xff,0x00,0xff,0x00};//爆闪/***************************延时子程序start***************************/void delay(unsigned int count){unsigned int i,j;for(j=0;j<120;j++);}/***************************延时子程序end***************************/void led_display(void){uchar i,j;/****************显示模式1**********************/ for(i=0;i<LED_DATA1[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA1[j];delay(LED_DATA1[1]);}}/**********************************************/ /****************显示模式2**********************/ for(i=0;i<LED_DATA2[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA2[j];delay(LED_DATA2[1]);}}/**********************************************/ /****************显示模式3**********************/ for(i=0;i<LED_DATA3[0];i++){P0=~LED_DATA3[j];delay(LED_DATA3[1]);}}/**********************************************/ /****************显示模式4**********************/ for(i=0;i<LED_DATA4[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA4[j];delay(LED_DATA4[1]);}}/**********************************************/ /****************显示模式5**********************/ for(i=0;i<LED_DATA5[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA5[j];delay(LED_DATA5[1]);}}/**********************************************/ /****************显示模式6**********************/for(i=0;i<LED_DATA6[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA6[j];delay(LED_DATA6[1]);}}/**********************************************/ /****************显示模式7**********************/ for(i=0;i<LED_DATA7[0];i++){ for(j=2;j<18;j++){P0=~LED_DATA7[j];delay(LED_DATA7[1]);}}/**********************************************/ }main(){P0=1;//清LEDwhile(1){led_display();//调用LED显示程序}}。
单片机整套实验及程序(交通灯_跑马灯等)文档

单片机整套实验及程序(交通灯_跑马灯等)文档实验1 跑马灯实验一、实验目的●初步学会Proteus ISIS和uVision2单片机集成开发环境的使用;●初步掌握采用汇编语言与C语言开发单片机系统的程序结构;●掌握80C51单片机通用I/O口的使用;●掌握单片机内部定时/计数器的使用及编程方法以及中断处理程序的编写方法。
二、实验设备及器件●硬件:PC机,HNIST-1型单片机实验系统●软件:Proteus ISIS单片机仿真环境,uVision2单片机集成开发环境三、实验内容●编写一段程序,采用P1口作为控制端口,使与P1口相接的四个发光二极管(D1、D2、D3、D4)按照一定的方式点亮。
如点亮方式为:先点亮D1,延时一段时间,再顺序点亮D2……D4,然后又是D4……D1,同时只能有一个灯亮;然后每隔一段时间一次使相邻两个灯亮,三个灯亮,四个灯亮,最后闪烁三次,接着循环变化。
●基于Proteus ISIS仿真环境完成上述功能的仿真。
●基于uVision2单片机集成开发环境与硬件平台完成程序的脱机运行。
四、实验原理图图3.1 跑马灯实验电路原理图电路原理图如上图3.1所示,AT89S52的P1.0~P1.3控制4个发光二极管,发光二极管按照一定次序发光,相邻发光二极管的发光时间间隔可以通过定时器控制,还可以通过软件延时实现。
五、软件流程图与参考程序● 主程序流程图如下:● 参考程序#include#include#define uchar unsigned char#define uint unsigned intuchar aa ,num ,speed ,flag;uchar code table[]={0x0e ,0x0d ,0x0b ,0x07};uchar code table1[]={0x0a ,0x05,0x09,0x06};uchar codetable2[]={0x0c ,0x09,0x03,0x08,0x01,0x0e ,0x0c ,0x08,0x00}; void delay(uint z)//延时函数uint x;uchar y;for(x=z;x>0;x--)for(y=200;y>0;y--);}void init()//条件初始化函数{ flag=0;speed=10;//控制跑马灯流水速度TMOD=0x01;//中断方式开始初始化(定时器、中断、标志位设置) Flag=1? 流水灯操作结束 Y NTH0=(65535-50000)/256;TL0=(65536-50000)%256;//初值EA=1;//打开总中断ET0=1;//打开外中断0TR0=1;}void main(){init();//调用初始化函数while(1){if(flag){delay(2000);//调用延时函数for(num=0;num<4;num++)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);for(num=3;num>0;num--)//从左至右间隔一个依次闪烁{P1=table[num];delay(2000);}for(num=0;num<4;num++)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=3;num>0;num--)//从左至右间隔两个依次闪烁{P1=table1[num];delay(2000);}for(num=0;num<6;num++)//两个,三个,四个跑马灯依次闪烁{P1=table2[num];delay(2000);}for(num=0;num<5;num++)//闪烁5次{P1=0xff;//全暗delay(2000);P1=0X00;//全亮delay(2000);}speed=speed-3;//变速if(speed==4){speed=10;}}}}void timer0() interrupt 1//中断函数{TH0=(65535-50000)/256;TL0=(65536-50000)%256;aa++;if(aa==speed){aa=0;flag=1;}}六、实验思考题●请用汇编指令完成本实验内容,深刻理解汇编语言程序设计结构。
61单片机课程设计可以调控的跑马灯

61-单片机课程设计-可以调控的跑马灯1000字设计目的本课程设计旨在通过单片机编程实现一个可调控的跑马灯,加深学生对单片机概念、程序设计、输入输出等方面的理解,提高学生的程序设计能力。
设计实验材料1. 基于8051单片机的电路板2. LED灯3. 电阻器4. 按钮5. 电源(可使用9V电池或其他稳定的直流电源)实验过程1. 搭建基于8051单片机的电路板,连接LED灯和电阻器2. 编写跑马灯程序,其中需要实现以下功能:(1)通过按下按钮,控制灯的亮灭(2)通过另一个按钮,调整灯的亮度(3)通过另一个按钮,调整灯的闪烁频率3. 烧录程序到单片机中4. 连接电源,测试跑马灯的各项功能程序设计本跑马灯程序采用C语言编写,主要实现以下几个功能:1. 初始化LED灯、按键和定时器等相关IO口2. 判断按键被按下,执行相应的操作3. 调整LED灯的亮灭状态,并通过调整亮度和闪烁频率实现可调控功能程序流程:1. 初始化相关IO口和定时器2. 进入主循环3. 判断按钮是否被按下4. 若开始按钮被按下,则设置灯的状态为ON5. 若结束按钮被按下,则设置灯的状态为OFF6. 若调整亮度按钮被按下,则调整PWM占空比,实现亮度调整7. 若调整闪烁频率按钮被按下,则调整定时器的周期,实现闪烁频率调整8. 延时一段时间9. 回到主循环程序代码:```#include <reg52.h>#define LED P1 // LED灯#define PWM P2 // 调整亮度sbit startButton = P3^0; // 开始按钮sbit endButton = P3^1; // 结束按钮sbit pwmButton = P3^2; // 调整亮度按钮sbit freqButton = P3^3; // 调整闪烁频率按钮void timer0_init() // 初始化定时器{TMOD = 0x01;TH0 = 0x3C;TL0 = 0xB0;TR0 = 1;}void pwm_init() // 初始化PWM {TMOD |= 0x02;TL1 = 0x00;TH1 = 0xFD;ET1 = 0;TR1 = 1;}void main(){unsigned long cnt = 0;unsigned char pwm_value = 0; LED = 0x00;PWM = 0x00;timer0_init();pwm_init();while (1){if (startButton == 0){LED = 0x01;}else if (endButton == 0){LED = 0x00;}else if (pwmButton == 0){pwm_value++;if (pwm_value >= 255){pwm_value = 0;}CCAP0H = pwm_value;}else if (freqButton == 0){cnt++;if (cnt >= 1000){cnt = 0;}TH0 = (65536 - 1000) / 256; TL0 = (65536 - 1000) % 256; }while (TF0 == 0); // 等待定时器 TF0 = 0;}}```实验结果将程序烧录到单片机后,连接电源,按下不同的按钮,可调控跑马灯的亮度和闪烁频率。
单片机整套实验及程序交通灯_跑马灯等
单片机整套实验及程序交通灯_跑马灯等一、单片机整套实验及程序介绍单片机是指一种完整的计算机系统,它是一种将控制器、存储器和输入/输出接口等功能合并在一块芯片上的微处理器。
利用它可以实现各种各样的自动控制系统,广泛应用于工业生产、通讯、计算机硬件系统、军事装备等领域。
在学习单片机时,学习实验是很重要的环节,可以帮助我们更好地理解单片机的原理及其应用。
在此提供一个包含跑马灯和交通灯两个实验的单片机整套实验及程序。
通过这两个实验的学习,可以加深自己对单片机逻辑控制原理的理解,同时也可以提高自己的实际操作能力。
二、跑马灯实验1、实验目的熟悉单片机系统的组成,学习使用单片机的输入/输出口,学习单片机的编程语言,并能用单片机实现跑马灯。
2、实验内容和步骤硬件方面:准备好实验板、单片机、按键、电源等硬件设备,连接好,保证正常工作。
软件方面:利用Keil uVision 4软件建立一个新工程,命名为“跑马灯”。
编写代码:根据单片机的输出口、输入口的接口,进行编程设计。
具体步骤如下:1)设置输入口:设置P32口作为设置跑马灯速度的按键,设置P33口作为开关跑马灯的按键。
2)设置输出口:设置P11~P14口的四个灯,作为跑马灯的显示口。
3)编程:程序的主程序是一个死循环,通过循环控制灯的亮灭,以便达到跑马灯的效果。
按键的实现是通过监测按键输出电平的变化来确定开启、关闭跑马灯的命令,同时还可以通过按键来实现调整跑马灯速度的目的。
3、实验结果通过编写代码,连接相应硬件,完成跑马灯的实验,输出口的LED灯像一个个由左向右、由右向左穿梭的小马跑,实验目的达到。
三、交通灯实验1、实验目的熟悉单片机系统的组成,学习使用单片机的输入/输出口,学习单片机的编程语言,并能用单片机实现交通灯系统。
2、实验内容和步骤硬件方面:准备好实验板、单片机、LED灯等硬件设备,连接好,保证正常工作。
软件方面:利用Keil uVision 4软件建立一个新工程,命名为“交通灯”。
最新单片机汇编语言跑马灯
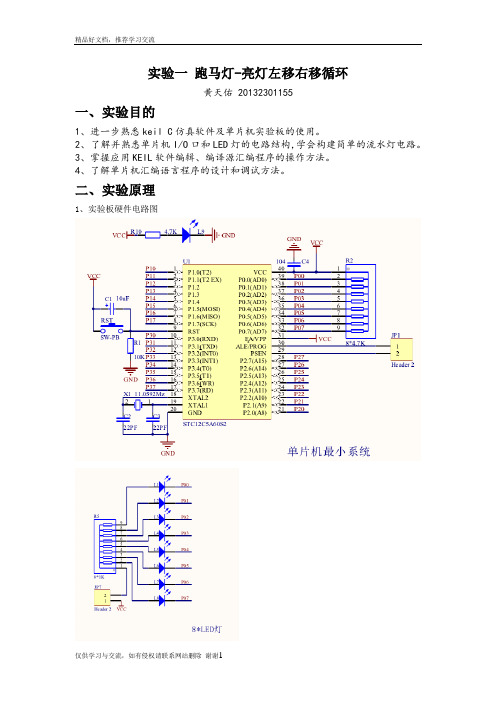
实验一跑马灯-亮灯左移右移循环黄天佑 20132301155一、实验目的1、进一步熟悉keil C仿真软件及单片机实验板的使用。
2、了解并熟悉单片机I/O口和LED灯的电路结构,学会构建简单的流水灯电路。
3、掌握应用KEIL软件编辑、编译源汇编程序的操作方法。
4、了解单片机汇编语言程序的设计和调试方法。
二、实验原理1、实验板硬件电路图2、单片机流水灯程序设计(1)流水灯程序设计思路及程序流程。
实现流水灯的方法有很多,这里介绍一种。
(2)产生流水灯效果程序(逐条程序加注释)start:mov R0,#8 ; 设置左移8次mov A,#0FEH; 存入开始亮灯的位置LOOP: mov P0,A; 传送P0并输出ACALL DELAY; 调用延时程序RL A; 左移1位DJNZ R0,LOOP; 判断移送次数mov R1,#8; 设置右移8次LOOP1:RR A; 右移1位mov P0,A; 传送到P0口并输出ACALL DELAY; 调用延时程序DJNZ R1,LOOP1; 判断右移次数JMP start; 重新设定显示DELAY: mov R5,#10; 延时0.1s子程序D1: mov R6,#100;D2: mov R7,#100;DJNZ R7,$;DJNZ R6,D2;DJNZ R5,D1;RET ; 子程序返回END ; 程序结束三、实验步骤及调试过程1、汇编语言程序的编写与调试(1)新建一个工程(2)保存文件,设一个文件名(3)找到对应单片机的芯片,这里我们选AT89C51即可接着我们新建一个文本写程序(1)(2)保存文件名,注意文件名的后缀应该为.asm(汇编语言程序的格式)接着把我们的文本导入到工程里面去:(1)(2)点击Add,再Close即可2.汇编语言程序编译及下载(1)这里要设置一个输出.hex文件(2)点击生成工程相应的文件同时可以观察下面的结果:0 Error(s),即可。
微机课程设计跑马灯c语言
微机课程设计跑马灯c语
言
The Standardization Office was revised on the afternoon of December 13, 2020
第1章课程设计目的
1.1设计目的总述
通过《微机原理与接口》课程设计,使学生能够进一步了解微型计算机工作原理,微型计算机的硬件结构及微型计算机软件编程。
要求学生根据接口电路的硬件要
求进行计算机语言程序设计,使学生的软件编程能力得到加强,对接口电路的综
合应用能力有较大的提高。
第2章总体方案
2.1 设计要求
此次课程设计的要求为,设计微型计算机最小系统,实现跑马灯的模拟显示功能。
具体要求为:
(1)输入设备三个启动按钮、一个停止按钮,输出设备为八个跑马灯;
(2)三个启动按钮对应三种跑马灯显示效果,按下任意一个启动按钮,跑马灯显示对应的效果,按下停止按钮则跑马灯全部熄灭。
2.2 设计分析
设计一个闪烁跑马灯控制器,该控制器可以控制8个灯顺序亮灭。
当按下key1,8个灯依次从左向右亮。
这时,如果按钮key2按下,则灯亮的顺序是从右向左。
这时,如果按下按钮key3,则此时,发光二极管循环全亮全灭。
最后,若按下按钮key4则全部灯灭。
执行任意效果时,按下其它键,都可执行其相应效果。
IO基础学习之跑马灯
程序1:流水灯之从右到左跑马灯#include <msp430g2553.h>void main(void){ unsigned int i;char j,k;WDTCTL = WDTPW + WDTHOLD; // 停止看门狗//系统时钟默认DCO(内部数字控制振荡器)(约1.1MHz,可设置)P1DIR = 0xff; // 设置P1口为输出while(1){k=1;for (j=0;j<8;j++) //循环8次,即P10~~P17轮流闪亮{ P1OUT=~k; //反相输出,低电平有效for(i=65535;i>0;i--); // 延时k=k<<1; //左移一位}}}核心程序分析:while(1){k=1;for (j=0;j<8;j++) //循环8次,即P1.0~~P1.7轮流闪亮{ P1OUT=~k; //反相输出,低电平有效for(i=65535;i>0;i--); // 延时k=k<<1; //左移一位}}关键在于理解低电平点亮,为了保证电位为零,先设置一个临时变量,然后逐步左移,保证电位为零的位只有一个,而且可以逐步移动。
这个程序关键步骤也可以写成这样的:while(1){temp=0xfe;P1OUT=temp;for(i=65535;i>0;i--); // 延时for (j=1;j<8;j++) //循环7次,即P1.0~~P1.7轮流闪亮{int a,b;a=temp<<j;b=temp>>(8-j);P1OUT=a|b; //低电平有效for(i=65535;i>0;i--); // 延时}}另外一种写法:while(1){P1OUT=0xfe;for(i=65535;i>0;i--); // 延时while( P1OUT!=0x7f ){P1OUT<<=1;P1OUT|=0x01;for(i=65535;i>0;i--); // 延时}}当然还可以采用数组(位表)赋值,开关语句赋值的方法。
单片机实例之跑马灯
图3-7 新建工程窗口
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-8 新建工程窗口
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-9 单片机选择窗口
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-10 目的1属性设置窗口
文档仅供参考,如有不当之处,请联系改正。
DJNZ R7,LOOP
DJNZ R6,SS
整个子程序延时为: {[2μs×249+1+2]×200+2}×5=501010μs
汇编语言程序:
org 0000h LS:
setb p1.0 Lcall delay clr P1.0 Lcall delay sjmp $
文档仅供参考,如有不当之处,请联系改正。
4.完毕写入编程。
5.退出程序:左击界面右上角旳“x”按钮, 退出此程序。
文档仅供参考,如有不当之处,请联系改正。
文档仅供参考,如有不当之处,请联系改正。
任务二 跑马灯
本任务让图3-28中旳LED依次点亮
图3-28 LED硬件图
文档仅供参考,如有不当之处,请联系改正。
程序设计分析
为了让图3-28所示旳LED依次点亮,就是要求从P1口从 P1.0至P1.7依次输出低电平,其他引脚都输出高电平,就 能让被接在端口旳彩灯依次点亮。
KEIL 软件开发平台
图3-20 硬件查询窗口
I/O口全部打开界面
文档仅供参考,如有不当之处,请联系改正。
KEIL 软件开发平台
图3-21 硬件I/0口查询窗口
文档仅供参考,如有不当之处,请联系改正。
单片机跑马灯程序
单片机跑马灯程序*******************************************************************;此程序是用单片机的p1 口接八个led 灯作跑马灯试验,八个led 依次亮了又熄灭,形成漂亮;的跑马灯。
本人已经试验成功。
;单片机教程网51hei 原创;该8 路单片机跑马灯程序代码简单,电路也容易搭建,只需把led 接在p1 口上就可以了,希望大家能试验成功顺利的完成跑马灯报告;****************************************** *************************org 0000hajmp start;跳转到程序开始org 0030h;定义起始汇编地址start:mova,#0ffh ;clr c ;mov r2,#08h ;循环八次。
loop: rlc a ;带进位左移。
mov p1,a ;此时led 灯开始有反映了。
call delay ;延时djnz r2,loop ;循环(djnz 条件判断)movr2,#07h ;loop1: rrc a ;带进位右移mov p1,a ;此时led 灯开始有反映了。
call delay ;延时djnz r2,loop1 ;反复循环jmp start ;回到程序的开头delay: mov r3,#20 ;延时子程序d1: mov r4,#20d2: mov r5,#248djnz r5,$djnzr4,d2 单片机论坛51hei/bbs/ 有更多的跑马灯流水灯试验---------3 路单片机跑马灯程序---------------------------------------ORG 0000HLJMPMAINORG 030HMAIN: MOV P1,#0DBH ;化为2 进制为11011011--0 状态时led灯亮ACALL DELay MOV P1,#06DH ;化为2 进制为01101101ACALL DELay;MOV P1,#0B6H ;化为2 进制为10110110ACALL DELayAJMP MAINdelay: movr7,#255d1: mov r6,#255d2: djnz r6,d2djnz r7,d1retendtips:感谢大家的阅读,本文由我司收集整编。