中山学院信号与系统实验——连续系统的Simulink仿真
实验四Simulink系统仿真实...
实验四Simulink系统仿真实验要求:1、掌握Simulink常用输入、输出、运算模块。
2、掌握Simulink模型的建立及系统仿真方法。
Simulink 是面向框图的仿真软件。
7.1 演示一个Simulink 的简单程序【例7.1】创建一个正弦信号的仿真模型。
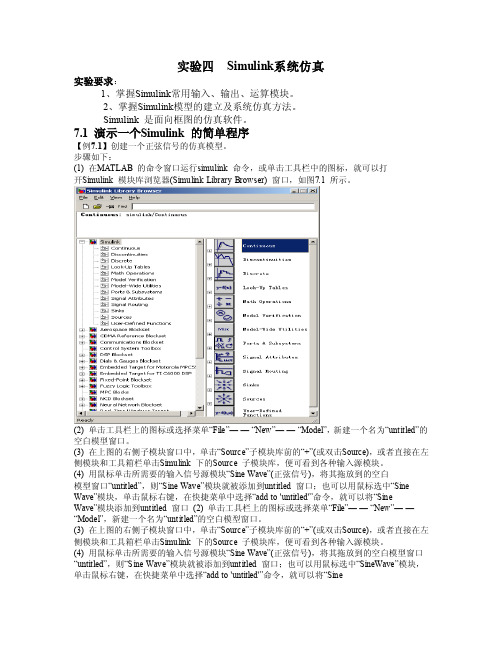
步骤如下:(1) 在MATLAB 的命令窗口运行simulink 命令,或单击工具栏中的图标,就可以打开Simulink 模块库浏览器(Simulink Library Browser) 窗口,如图7.1 所示。
(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled 窗口;也可以用鼠标选中“Sine Wave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“Sine Wave”模块添加到untitled 窗口(2) 单击工具栏上的图标或选择菜单“File”——“New”——“Model”,新建一个名为“untitled”的空白模型窗口。
(3) 在上图的右侧子模块窗口中,单击“Source”子模块库前的“+”(或双击Source),或者直接在左侧模块和工具箱栏单击Simulink 下的Source 子模块库,便可看到各种输入源模块。
(4) 用鼠标单击所需要的输入信号源模块“Sine Wave”(正弦信号),将其拖放到的空白模型窗口“untitled”,则“Sine Wave”模块就被添加到untitled 窗口;也可以用鼠标选中“SineWave”模块,单击鼠标右键,在快捷菜单中选择“add to 'untitled'”命令,就可以将“SineWave”模块添加到untitled 窗口。
SIMULINK仿真连续系统建模
• 积分模块:只是把他们的名称分别改为Int1,Int2。
• G1和G2增益模块:它们的方向旋转可以借助菜 单[Format:Rotate Block]实现。
• Scope示波器:先双击该模块,出现示波窗;点 击工具图标 ,引出参数设置页;在Data history页中,勾选Save data to workspace。这将 送入示波器的数据同时被保存在MATLAB基本空 间的缺省名为ScopeData的构架数组中。
移动标识:点击标识,待编辑框出现后,将光 标指向编辑框,按下鼠标后拖动至新位置。
• 复制标识:类似于移动标识,只是要求同 时按下ctrl键,或者改用鼠标右键操作。
• 删除标识:点击标识,待编辑框出现后, 双击标识使得整个标识被全部选中,按 “delete”键。
常用的Source库信源
名称 模块形状
• 例:物理背景:如图所示喷射动力车的定位控制 问题。要求设计一个控制器,其目标是:当车辆 的位移和速度为正时,控制器点燃右发动机;当 车辆的位移和速度为负时,控制器点燃左发动机, 直至车辆停止在坐标原点。
x
F
m
装置左右喷射发动机的车辆示意图
• 1)根据车辆的动态方程,构作基本仿真模 型
在阻力忽略不计的假设下,据牛顿定理 可写出 mx F 。又设喷射力F=1,车质 量m=5,初始条件是 x(0) 0 ,x(0) 1
• Int2积分模块:它的输入是速度,输出是位移。 初始值为1。
• XY Gragh绘图器:它的上、下端口分别作为图形 坐标的横、纵坐标变量。
simulink连续系统建模仿真

1、''()3'()2()'()3()y t y t y t f t f t ++=+ 在本实验中,由此系统函数可知,传递函数为:2332p p p +++ 并且可以用Simulink 建立其模型:其中阶跃函数的参数设置效果截图为图1。
图2为传递函数的参数设置。
图1 阶跃函数的参数设置 图2 传递函数的参数设置2、点击Simulink 的调试按钮,接着双击运行着的示波器就能看见结果。
在理论上,该系统的冲激响应可以由以下方法给出。
y ''''由系统微分方程(t)+3y (t)+2y(t)=f (t)+3f(t)得到相应输入输出算子方程为:2()321()()3212B p p h p A p p p p p +===-++++ 所以2h1()2()1t t e t p ε-→=+ 212()()2t h t e t p ε--→=-+即再将各冲激分量相加就得到给定系统的冲激响应:2()1()2()2()()t t h t h t h t e t e t εε--=+=- 根据作图可知 两者的计算结果是一样的。
如下图3、图4所示分别是两种方法得出的结果。
图3 simulink 得出得结果 图4 理论计算的值输入函数为3t ()()f t e t ε-=,同理知道传递函数2332p p p +++,再次建立系统模型见图5。
图5 系统结构图仿真结果如图6所示,可以看见输出信号。
图6 系统仿真结果在理论上,同样的,系统的传递函数函数不变,冲激响应h(t)也不变。
也就是说 2()1()2()2()()t t h t h t h t e t et εε--=+=- 而3()()t f t e t ε-= 所以233232()(2()())()()()()()()()t t t t t t t t t y t e t e t e t e e t e e t e e t εεεεεε---------=-*=---=- 经过用matlab 画出y(t)的图形如下图7.图7 理论上的计算仿真结果截图由上两图可以看出,两种方法计算仿真的结果基本上是相同的结果,也证明了仿真的结果是正确的!思考题:在simulink仿真中,计算机无法计算与输出冲激信号,如果要输入冲激信号,只能利用节约信号来微分,得到的函数就是冲激函数。
simulink仿真实验报告
simulink仿真实验报告Simulink仿真实验报告一、引言Simulink是一种基于模型的设计和仿真工具,广泛应用于各领域的工程设计和研究中。
本次实验将利用Simulink进行系统仿真实验,通过搭建模型、参数调整、仿真运行等过程,验证系统设计的正确性和有效性。
二、实验目的本实验旨在帮助学生掌握Simulink的基本使用方法,了解系统仿真的过程和注意事项。
通过本实验,学生将能够:1. 熟悉Simulink的界面和基本操作;2. 理解和掌握模型构建的基本原理和方法;3. 学会调整系统参数、运行仿真和分析仿真结果。
三、实验内容本实验分为以下几个步骤:1. 绘制系统模型:根据实验要求,利用Simulink绘制出所需的系统模型,包括输入、输出、控制器、传感器等。
2. 参数设置:针对所绘制的系统模型,根据实验要求设置系统的参数,例如增益、阻尼系数等。
3. 仿真运行:通过Simulink的仿真功能,对所构建的系统模型进行仿真运行。
4. 仿真结果分析:根据仿真结果,分析系统的动态性能、稳态性能等指标,并与理论值进行对比。
四、实验结果与分析根据实验要求,我们绘制了一个负反馈控制系统的模型,并设置了相应的参数。
通过Simulink的仿真功能,我们进行了仿真运行,并获得了仿真结果。
仿真结果显示,系统经过调整参数后,得到了较好的控制效果。
输出信号的稳态误差较小,并且在过渡过程中没有发生明显的振荡或超调现象。
通过与理论值进行对比,我们验证了系统的稳态稳定性和动态响应性能较为理想。
五、实验总结通过本次实验,我们掌握了使用Simulink进行系统仿真的基本方法和技巧。
了解了系统模型构建的基本原理,并学会了参数调整和仿真结果分析的方法。
这对于我们今后的工程设计和研究具有重要的意义。
六、参考文献1. 《Simulink使用手册》,XXX出版社,20XX年。
2. XXX,XXX,XXX等.《系统仿真与建模实践教程》. 北京:XXX出版社,20XX年。
连续系统simulink传递函数建模分析方法程序设计
连续系统simulink传递函数建模分析方法程序设计搭建LTI连续系统的时域电路并将其映射到复频域(S域)解出其系统函数H(S),利用H(S)建立Simulink仿真模型,并编写求解连续系统零输入响应、零状态响应和全响应的数值解即MATLAB程序。
选择典型的RLC三阶电路系统,运用所建立的仿真模型和程序求解LTI连续电路系统,并对其进行展示。
目录引言 (1)1 快速计算LTI连续系统S域传递函数的思路 (1)1.1 理论分析方法 (1)1.2 连续系统LTI映射到复频率(S)域的必要性及思路 (1)1.3 连续系统LTI时域映射到复频率域的方法 (2)1.4 导出系统函数的思路 (3)2 利用simulink传递函数仿真模型求解LTI连续系统数值解的思路.. 3 2.1 时域电路系统映射到复频域(S域)的方法 (3)2.2 创建simulink传递函数和状态空间仿真模型文件的思路 (4)3求连续系统simulink传递函数建模分析方法程序设计的思路 (5)3.1 程序设计的思路与技巧 (5)3.2 关键语句分析 (6)4 程序应用实例 (6)4.1 S域电路系统函数和连续系统数值解的思路 (7)4.2 simulink仿真模型及程序求解电路响应 (9)4.2.1 传递函数模型 (9)4.2.2 状态空间模型 (11)4.3 程序运用实例展示 (14)5 结语 (16)参考文献 (17)引言现代社会的发展,诸多领域应用的系统都是连续系统,如科研、生产实践、产品和仪器检测等。
其连续系统中的控制电路都应该满足在一定的频带范围内,具有一定的放大和延迟功能。
连续系统的解法有解析解和数值解两种,相比而言,连续系统的时域解析解法虽然便于理论分析系统响应的变化趋势和系统特性,但实际系统总是多输入多输出的高阶系统,它们的解析微分方程书写困难,时域响应求解极为困难,出错率也较高,即便较低阶系统的解析方程能够得到,其求解也较复杂,耗时耗力[1]。
连续系统simulink状态空间建模分析方法程序设计

连续系统simulink状态空间建模分析方法程序设计连续系统simulink状态空间建模分析方法程序设计本课题基于对信号与信息处理课程中用matlab/simulink建模及应用分析滤波器问题的深入研究。
通过自身掌握的理论知识,主要以高阶连续系统(模拟滤波器)为例,并将其离散化,转化为离散系统,从而对离散系统处理。
用simulink状态空间函数模块建模,观察并分析波形。
其次,用matlab中的M文件编程,求解系统,绘制波形并进行频谱分析。
在本课题中,主要将连续系统转化为离散系统,再用计算机和matlab软件进行研究,用simulink对高阶离散系统建模,并设置模块参数,自定义函数为正弦波的叠加,传输函数的相关参数后运行并进行频谱分析,使信号的性态都能得到处理和研究。
通过编程,求解高阶离散系统的零输入响应,零状态响应和完全响应,求解实际生活中的各种问题,改变参数并对信号进行适当的频谱分析。
目录引言 (2)1 状态空间分析方法的概述 (2)2 快速创建LTI连续系统状态空间模型的方法 (3)2.1 创建LTI连续系统传递函数的方法 (3)2.2 构造描述LTI连续系统的状态空间模型矩阵 (4)3 利用simulink状态空间建模求解LTI系统数值解的思路 (5)3.1 MATLAB编程设计并描述低通数字滤波器 (5)3.2 创建系统的simulink状态空间模型 (7)3.3 模块内部参数设置及数据存储 (8)4 利用simulink状态空间建模求解LTI系统的优缺点 (9)5 连续系统simulink状态空间建模分析方法程序设计的思路 (10)5.1 调用模型文件及编程求解系统响应 (10)5.2 分析系统的频谱与相位 (11)6 状态空间分析方法的应用实例 (13)6.1 分析求解低阶电路系统 (13)6.2 设计分析滤波器系统...................................... 14 7 结束语 ..................................................... 14 引言随着科学技术的发展,系统的组成也日益复杂。
实验五 SIMULINK仿真
实验五SIMULINK仿真一、实验目的SIMULINK是一个对动态系统(包括连续系统、离散系统和混合系统)进行建模、仿真和综合分析的集成软件包,是MA TLAB的一个附加组件,其特点是模块化操作、易学易用,而且能够使用MATLAB提供的丰富的仿真资源。
在SIMULINK环境中,用户不仅可以观察现实世界中非线性因素和各种随机因素对系统行为的影响,而且也可以在仿真进程中改变感兴趣的参数,实时地观察系统行为的变化。
因此SIMULINK已然成为目前控制工程界的通用软件,而且在许多其他的领域,如通信、信号处理、DSP、电力、金融、生物系统等,也获得重要应用。
对于信息类专业的学生来说,无论是学习专业课程或者相关课程设计还是在今后的工作中,掌握SIMULINK,就等于是有了一把利器。
本次实验的目的就是通过上机训练,掌握利用SIMULINK对一些工程技术问题(例如数字电路)进行建模、仿真和分析的基本方法。
二、实验预备知识1. SIMULINK快速入门在工程实际中,控制系统的结构往往很复杂,如果不借助专用的系统建模软件,则很难准确地把一个控制系统的复杂模型输入计算机,对其进行进一步的分析与仿真。
1990年,Math Works软件公司为MATLAB提供了新的控制系统模型图输入与仿真工具,并命名为SIMULAB,该工具很快就在控制工程界获得了广泛的认可,使得仿真软件进入了模型化图形组态阶段。
但因其名字与当时比较著名的软件SIMULA类似,所以1992年正式将该软件更名为SIMULINK。
SIMULINK的出现,给控制系统分析与设计带来了福音。
顾名思义,该软件的名称表明了该系统的两个主要功能:Simu(仿真)和Link(连接),即该软件可以利用系统提供的各种功能模块并通过信号线连接各个模块从而创建出所需要的控制系统模型,然后利用SIMULINK提供的功能来对系统进行仿真和分析。
⏹SIMULINK的启动首先启动MATLAB,然后在MA TLAB主界面中单击上面的Simulink按钮或在命令窗口中输入simulink命令。
实验报告5Simulink仿真[推荐五篇]
![实验报告5Simulink仿真[推荐五篇]](https://img.taocdn.com/s3/m/938234db5ff7ba0d4a7302768e9951e79b896917.png)
实验报告5Simulink仿真[推荐五篇]第一篇:实验报告 5 Simulink仿真实验五 Simulink仿真(一)一、实验目的1、熟悉Simulink仿真环境2、了解Simulink基本操作3、了解Simulink系统建模基本方法3、熟悉Simulink仿真系统参数设置和子系统封装的基本方法二、实验内容1、在matlab命令窗口中输入simulink,观察其模块库的构成;2、了解模块库中常用模块的使用方法;3、已知单位负反馈系统的开环传递函数为G=100s+2s(s+1)(s+20)建立系统的模型,输入信号为单位阶跃信号,用示波器观察输出。
4、建立一个包含Gain、Transfer Fcn、Sum、Step、Sine Wave、Zero-Pole、Integrator、Derivative等模块构成的自定义模块库Library1;5、建立如图7-12所示的双闭环调速系统的Simulink的动态结构图,再把电流负反馈内环封装为子系统,建立动态结构图。
三、实验结果及分析:图5-1图5-2图5-3图5-4双闭环调速系统的Simulink的动态结构图图5-5把电流负反馈内环封装为子系统的动态结构图双击Subsystem模块,编辑反馈电流环Subsystem子系统,如图5-6所示:图5-6分析:Simulink是Mathworks开发的MATLAB中的工具之一,主要功能是实现动态系统建模、仿真与分析。
可以在实际系统制作出来之前,预先对系统进行仿真与分析,并可对系统做适当的适时修正或按照仿真的最佳效果来调试及整定控制系统的参数,达到提高系统性能。
减少涉及系统过程中的反复修改的时间、实现高效率地开发系统的目标。
Simulink提供了建模、分析和仿真各种动态系统的交互环境,包括连续系统、离散系统和混杂系统,还提供了采用鼠标拖放的方法建立系统框图模型的图形交互界面。
第二篇:仿真实验报告仿真软件实验实验名称:基于电渗流的微通道门进样的数值模拟实验日期:2013.9.4一、实验目的1、对建模及仿真技术初步了解2、学习并掌握Comsol Multiphysics的使用方法3、了解电渗进样原理并进行数值模拟4、运用Comsol Multiphysics建立多场耦合模型,加深对多耦合场的认识二、实验设备实验室计算机,Comsol Multiphysics 3.5a软件。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
电子科技大学中山学院学生实验报告院别:电子信息学院课程名称:信号与系统实验一、实验目的1. 掌握连续系统的Simulink建模方法;2. 掌握连续系统时域响应、频域响应的Simulink仿真方法。
二、实验原理连续系统的Simulink仿真分析包括系统模型的创建和仿真分析两个过程。
利用Simulink模块库中的有关功能模块创建的系统模型,主要有s域模型(例17-1)、传输函数模型(例17-2)和状态空间模型(例17-3)等形式。
若将信号源子模块库(Sources)中某种波形的信号源(如正弦或阶跃信号源),加于系统模型的输入端,则在系统模型的输出端用示波器观察零状态响应的波形,如图17-1所示。
图17-1 系统时域响应Simulink仿真的模型以Sources子模块库中的“In1”、Sinks 子模块库中的“Out1”分别作为系统模型的输入端和输出端,如图17-2所示。
图17-2 系统响应Simulink仿真的综合模型建立图17-2形式的系统模型并保存之后,利用如下相应的命令,可得到系统的状态空间变量、频率响应曲线、单位阶跃响应和单位冲激响应的波形。
[A,B,C,D]=linmod(‘模型文件名’) %求状态空间矩阵,注意:‘模型文件名’不含扩展名bode(A,B,C,D);%绘制系统的频率特性曲线bode(A,B,C,D, i u, ω0 : △ω : ω1);%绘制系统在ω0 ~ ω1频率范围内、步长为△ω的频率特性曲线;i u为输入端口编号,一般取1impulse(A,B,C,D)%绘制系统冲激响应的波形impulse(A,B,C,D, i u, t0 : △t : t1) %绘制系统在t0 ~ t1时间范围内、步长为△t的冲激响应的波形step(A,B,C,D)%绘制系统阶跃响应的波形step(A,B,C,D, i u, t0 :△t : t1) %绘制系统在t0 ~ t1时间范围内、步长为△t的阶跃响应的波形以上命令,可以逐条在MATLAB命令窗口输入、执行,也可编写成M文件并运行,获得所需结果。
1. s域模型的创建和时域响应的Simulink仿真【例17-1】连续系统如图17-3所示。
试用Simulink 仿真,绘出其单位阶跃响应和单位冲激响应的波形。
图17-3解:先建立系统的s 域模型,然后进行仿真分析。
(1)创建系统模型系统的s 域模型如图17-4所示。
建模过程中,添加功能模块和线路连接等与前述相同,下面只对阶跃信号源、加法器、数乘器的参数设置进行说明。
图17-4 例17-1的模型右击 “Step ”模块(阶跃信号源),执行快捷菜单中的“Step Parameters …”项,在弹出的对话框中将“Step time ”(跃变时间)项由“1”改为“0”。
加法器的形状、输入端的数量、端口位置等属性的修改:双击左加法器,在对话框中将其外形由圆形(round )改为矩形(rectangular ),再将其输入端符号(List of signs )由“| + +”改为“| + - -”。
双击右加法器, “List of signs ”项由“| + +”改为“+ + |”。
数乘器属性的修改:右击数乘器Gain1,执行快捷菜单中的Format —Flip block 将图形翻转;再双击之,在模块参数对话框(Block parameters )中的Gain (增益)栏输入“3”,然后点击“OK ”按钮,完成数乘器Gain1的增益设置。
其余数乘器的设置,方法相同。
(2)系统的仿真 单击模型窗口中的“”图标,运行Simulink 仿真。
然后,双击示波器模块,弹出的示波器窗口,显示仿真结果如图17-5所示。
(A )单位阶跃响应 (B )单位冲激响应图17-5 例17-1的仿真结果2. 传递函数模型的创建、时域响应和频域响应的Simulink 仿真【例17-2】连续系统的微分方程为)(3)(2)(4.0)(2.0)(t f t f t y t y t y +'=+'+''试用Simulink 作仿真,绘出其单位阶跃响应的波形和频率响应曲线。
解:现采用传递函数的方式来建模。
对微分方程求拉普拉斯变换,得系统函数:4.02.032)(2+++=s s s s H建模和仿真过程:将Continuous 子模块库中的Transfer Fcn (传递函数)模块、Sources 子模块库中的In1模块、Sinks 子模块库中的Out1模块拖放到新建模型窗口中,然后连线,如图17-6所示。
Transfer Fcn 模块参数的设置:双击Transfer Fcn 模块,在模块参数(Block Parameters)对话框中的Numerator 栏中输入系统函数分子系数向量[2 3],在Denominator 栏中输入系统函数分母系数向量[1 0.2 0.4],然后点击“OK ”按钮。
至此,完成了系统的建模,以文件名“example1702.mdl ”存盘。
图17-6 例17-2系统模型编写如下M文件,以文件名“exam1702.m”存盘。
(注:M文件的主文件名不要与系统模型文件相同)。
[A,B,C,D]=linmod('example1702');figure(1)impulse(A,B,C,D,1,0:0.01:50);figure(2)step(A,B,C,D,1,0:0.01:50);figure(3)bode(A,B,C,D,1,0:0.01:1000);运行该M文件后,得如图17-7所示的仿真结果。
(A)单位冲激响应(B)单位阶跃响应(C )频率响应特性曲线 图17-7 例17-2仿真结果3. 状态空间模型的创建、时域响应和频域响应的Simulink 仿真【例17-3】描述线性连续系统的状态方程和输出方程为DuCx y Bu Ax x +=+='其中,x 代表状态矢量,u 代表输入矢量,y 代表输出矢量,且⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡-=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡=⎥⎥⎥⎦⎤⎢⎢⎢⎣⎡----=01,200020,001,120005.0211D C B A 试用Simulink 仿真,绘出其单位冲激响应的波形、系统频率响应特性曲线。
解:创建系统模型如图17-8所示。
图17-8 例17-3系统模型现介绍State-Space 模块参数的设置:双击State-Space 模块,在Block Parameters 对话框的各项中分别输入相应的矩阵:A : [-1,-1,-2;0.5,0,0;0,2,-1]B : [1,0,0]’C : [0,2,0;0,0,-2]D : [1,0]’ 完成系统的建模后,以文件名“example1703.mdl ”将系统模型存盘。
(1)编写并运行如下M 文件(“exam1703.m ”)后,得如图17-9所示的仿真结果。
[A,B,C,D]=linmod('example1703');figure(1);impulse(A,B,C,D,1,0:0.01:100); figure(2);bode(A,B,C,D,1,0:0.01:10);(2)编写如下M 文件(文件名“exam1703H.m ”),求系统函数H 。
syms s[A,B,C,D]=linmod('example1703') I=[1 0 0;0 1 0;0 0 1]; H=C*inv(s*I-A)*B+D运行后,得如下仿真结果: H =2*(s+1)/(2*s^3+4*s^2+3*s+5)+1 -4/(2*s^3+4*s^2+3*s+5)整理后,两个输出端口的系统函数:5.25.124)(,15.25.121)(232231+++-=+++++=s s s s H s s s s s H (A )单位冲激响应(A )单位冲激响应(B )频率响应图17-9 例17-3仿真结果【例17-4】线性系统如图17-10所示,已知a =1.2,b =5,c =-0.2。
取积分器输出),(21x x 为状态变量。
图17-10(1)列出系统的状态方程和输出方程;(2)用Simulink 中的状态空间模块建立系统模型,分析系统的频率特性。
解:方法1:经理论分析求得系统的状态空间矩阵,然后按例17-3的方法建模和仿真。
系统的状态方程和输出方程分别为:[]f bc c a x x bc c x x ⎥⎦⎤⎢⎣⎡++⎥⎦⎤⎢⎣⎡⎥⎦⎤⎢⎣⎡=⎥⎦⎤⎢⎣⎡212101 []]][1[01211f x x f x y +⎥⎦⎤⎢⎣⎡=+=方法2:建模--求状态空间矩阵--系统时域、频域分析。
过程如下:(1)建立系统的s 域模型,如图17-11所示,并以文件名example1704.mdl 存盘。
(2)求状态空间矩阵、频率特性图17-11 例17-4的系统模型①求状态空间矩阵。
在MATLAB 命令窗口中输入命令: >> [A B C D]=linmod('example1704')可得系统的状态空间矩阵: A =-0.2000 1.0000 -1.0000 0 B =1.0000 -1.0000 C =1.0000 0 D =1图17-12 例17-4系统的频率特性对比可知,仿真结果与理论分析结果是一致的。
②求系统的频率特性。
执行如下命令,可得系统的频率特性图: >> bode(A,B,C,D);grid on仿真结果如图17-12所示,图中分别给出了系统的幅频特性和相频特性。
三、实验内容1. 已知连续系统的系统函数为93)(2+++=s s s s H 。
用系统函数的形式建立系统模型,进行Simulink仿真,(1)绘出阶跃响应波形;(2)绘出系统的频率特性图。
2. 已知连续系统的的微分方程为)(2)()(2)(3)(t f t f t y t y t y +'=+'+''建立系统模型,进行Simulink 仿真。
(1)若)π2si n()(t t f =,绘出系统零状态响应波形;(2)分析系统的频率特性。
3. 线性系统如图17-13所示。
要求:建立系统的s 域模型,编写执行Simulink 仿真命令的M 文件,求系统的状态空间变量,绘出系统的冲激响应波形和频率响应特性曲线。
图17-13四、实验结果及分析通过本次实验,我熟练掌握了连续系统时域响应、频域响应的Simulink 仿真方法,明白了连续系统的Simulink 仿真分析包括系统模型的创建和仿真分析两个过程;同时利用Simulink 模块库中的有关功能模块创建的系统模型,主要有s 域模型、传输函数模型和状态空间模型等形式,最后也掌握了一些常用连续系统的Simulink 建模方法。