基于主从控制思想的入口张力辊控制系统的应用
基于神经网络PID控制的轧机液压弯辊系统研究
sh [ Γ( s)] Zc (s)
ch [ Γ( s)]
、
设
∂E ( k ) ∂Yout ∂V = −δ ' ,由(5)式可得: " ∂Yout ∂V ∂netl
∂netl" = w"jl ' ∂O j
(12)
u21 =
sh [ Γ( s)] Z c ( s) 1 u22 = ch[Γ( s)] 、 ch [ Γ( s ) ]
E (k ) ≤ ε
(9)
ε 为目标误差值,按照梯度下降法修正网络的
权系数,即按 E ( k ) 对加权系数的 Z 负梯度方向搜 索调整。 设在 k 时刻,经过神经网络 PID 控制器后的输 出为 V ( k ) 。输入层到隐含层的权值更新公式为:
' ' wij (k + 1) = wij (k ) − η
Abstract: The hydraulic bending roll system is the basic automatic control means of the plate-shaped, with high precision ,fast response, compact structure, etc., it is widely used. Thereby, increasing the dynamic quality of the bending roll system has important theoretical and practical significance on the realization of automatic control of high-quality shape. PID control is simple and widely used, not only eliminating residual error, but also improving system stability. At present the conventional PID control is widely used in the bending roll shape control systems of rolling mills, but the control parameters of the various links is difficult to control, and in actual the bending roll systems have serious random disturbance, multi-variable, nonlinear, strong coupling, etc. It is too difficult to establish an accurate mathematical model of the bending roll system, especially adding the pipeline link, because of the dynamic properties of the pipeline, the system becomes more difficult to control, the conventional PID control is too difficult to meet the requirement of high-precision control. In order to improve the performance of the bending roll control system, based on the model of the bending roll system with the conventional PID control, we can establish the system model with the PID control based on the neural network, through self-learning ability and fast computing power of the neural network to find an optimal non-linear combination of PID control law based on neural network, enhancing the adaptive capacity and self-learning ability, and carrying out the adjustment of the PID parameters. The simulation and experimental results show that neural network PID control method compared to the conventional PID control method can improve the response speed and stability accuracy of the system. Key words: Bending roll system Pipeline dynamics Neural network PID control
张力控制系统
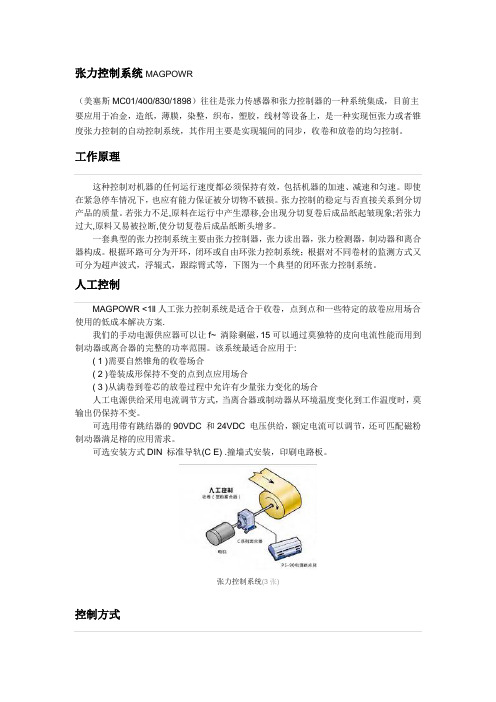
张力控制系统MAGPOWR(美塞斯MC01/400/830/1898)往往是张力传感器和张力控制器的一种系统集成,目前主要应用于冶金,造纸,薄膜,染整,织布,塑胶,线材等设备上,是一种实现恒张力或者锥度张力控制的自动控制系统,其作用主要是实现辊间的同步,收卷和放卷的均匀控制。
工作原理这种控制对机器的任何运行速度都必须保持有效,包括机器的加速、减速和匀速。
即使在紧急停车情况下,也应有能力保证被分切物不破损。
张力控制的稳定与否直接关系到分切产品的质量。
若张力不足,原料在运行中产生漂移,会出现分切复卷后成品纸起皱现象;若张力过大,原料又易被拉断,使分切复卷后成品纸断头增多。
一套典型的张力控制系统主要由张力控制器,张力读出器,张力检测器,制动器和离合器构成。
根据环路可分为开环,闭环或自由环张力控制系统;根据对不同卷材的监测方式又可分为超声波式,浮辊式,跟踪臂式等,下图为一个典型的闭环张力控制系统。
人工控制MAGPOWR <1ll人工张力控制系统是适合于收卷,点到点和一些特定的放卷应用场合使用的低成本解决方案.我们的手动电源供应器可以让f~ 淌除剩磁,15可以通过莫独特的皮向电流性能而用到制动器或离合器的完整的功率范围。
该系统最适合应用于:( 1 )需要自然锥角的收卷场合( 2 )卷装成形保持不变的点到点应用场合( 3 )从满卷到卷芯的放卷过程中允许有少量张力变化的场合人工电源供给采用电流调节方式,当离合器或制动器从环境温度变化到工作温度时,莫输出仍保持不变。
可选用带有跳结器的90VDC 和24VDC 电压供给,额定电流可以调节,还可匹配磁粉制动器满足榕的应用需求。
可选安装方式DIN 标准导轨(C E) .撞墙式安装,印刷电路板。
张力控制系统(3张)控制方式1、手动控制,在收料、放料或过程中不断调整离合器或制动器的扭矩,从而获得所需的张力,这就要求用户必须随时检查被控材料的张力,随时调节输出力矩,若用气动制动器或离合器时,手动控制器可直接选用精密调压阀,可使用户节约一定的设备成本,但仅适用于一些低速的复合机、挤出机、纺织机械等张力控制要求不高的场合。
张力辊组及其控制
(2)
M = (T+T 弹塑-T 离) (eμα-1) D / 2
(3)
张力辊处于发电状态 (T> T1) 时:
T-T 弹塑-T 离= (T1+T 弹塑-T 离) / eμα
(4)
M = (T1+T 弹塑-T 离) (eμα-1) D / 2
(5)
式中 μ— ——辊子与带钢 的 摩 擦 系 数 ; α— ——
5结语
在钢带连续生产线中, 为满足生产工艺要 求并确保不断带, 需将全线分成多个不同的张 力分区, 因此张力辊组的设置和张力辊组的控 制显得非常重要。 为保证全线稳定高速运行, 目前张力辊组更多采用直接张力闭环控制, 同 时为减少投资和节能, 张力辊组采用公共直流 母线的集中整流和独立逆变的变频调速方案。
2.2 张力辊组的计算
张力辊的计算主要包括张力辊几何尺寸计
算、 张力的计算、 张力辊传动力矩、 传动功率
的计算等。
2.2.1 张力辊几何尺寸的确定
张力辊辊径的选择, 应以带钢最外层表面
达到屈服极限为出发点, 这样可防止带钢出现
永久变形, 张力辊的最小半径为:
D≥ E×hmax / σs
(1)
式 中 : D— ——张 力 辊 辊 径/mm; E— ——带 钢
Key Words Steel Rolling Strip Tension Roller Unit Calculation Control
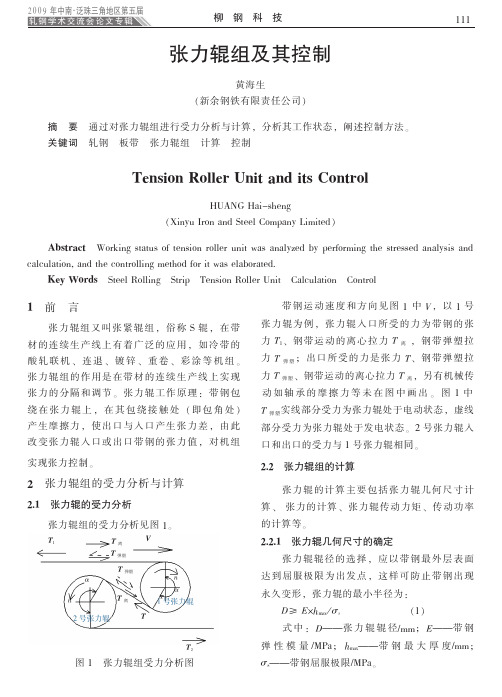
1前言
张力辊组又叫张紧辊组, 俗称 S 辊, 在带 材的连续生产线上有着广泛的应用, 如冷带的 酸轧联机、 连退、 镀锌、 重卷、 彩涂等机组。 张力辊组的作用是在带材的连续生产线上实现 张力的分隔和调节。 张力辊工作原理: 带钢包 绕在张力辊上, 在其包绕接触处 (即包角处) 产生摩擦力, 使出口与入口产生张力差, 由此 改变张力辊入口或出口带钢的张力值, 对机组
基于模糊自适应pid算法的复卷机退纸辊张力控制
基于模糊自适应pid算法的复卷机退纸辊张力控制
随着小型复卷机的迅猛发展,复卷机的控制精度和动作响应时间也越来越重要。
由于复卷机的工作环境受到多种多样的影响,传统的PID 控制方法不能很好地解决复卷机退纸辊张力控制中多变的控制问题。
为了解决上述问题,研究人员提出了基于模糊自适应PID算法的复卷机退纸辊张力控制系统。
该控制系统通过利用模糊控制来实现复卷机的退纸辊张力的智能控制。
首先,从系统的测量值出发,根据采样值测量到的信号,运用模糊控制原理,将测量值与模糊规则的输出结果(比如张力的调节幅度)进行比较。
通过改变调节幅度,达到调节复卷机退纸辊张力的目的。
此外,该控制系统还运用自适应PID算法,不断对模糊控制参数进行调整优化,根据实际变量进行控制参数的调节,找到最优的控制参数。
通过确定的优化参数,使系统的响应时间得到显著改善。
在实际的复卷机退纸辊张力控制过程中,通过基于模糊自适应PID算法控制复卷机退纸辊张力,具有响应灵敏、调节精确,对复卷机机械结构可靠性、退纸辊张力的控制效果有一定的提升,这也是该控制系统得到广泛应用的原因之一。
总之,基于模糊自适应PID算法的复卷机退纸辊张力控制系统能够解决复卷机控制中多变的控制问题,提高控制的准确性,提高控制的效率,消除因环境影响对系统的干扰,为复卷机控制提供了一种有效的控制方法。
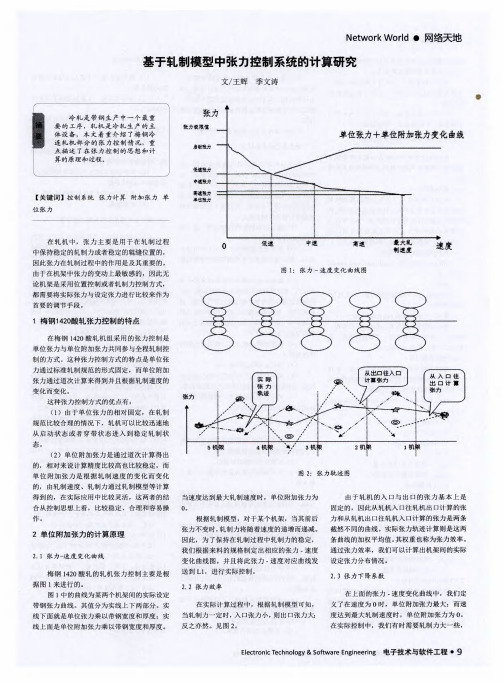
基于轧制模型中张力控制系统的计算研究
( 2 )如果在 轧制规范 中定义 了单位 附加 程 与预计算 中是一样 的。不 同点在 于计算 的输 张力,则计算机架 出 口单位 附加 张力计 算初始 入值 中多了实 际张力 的影响 。由于每个机架都
值。
f l a … …)
有 测张 辊,L 2将 以 2 0 0毫秒 的周期 对实 际数
产生新的设定值,并且发送 到 L l 。
( 4 )调用磨擦 系数公式 计算当前机 架的
摩擦 系数。 ( 5 )为轧制模型提供输入值 。 ( 6 )调用轧制 模型对此 张力输入值 进行 校验, 同时给出新 的轧制力和新 的接触弧长度 。 新的轧制力和新的接触弧长 度。
4 结 束语
其中:
0 组 数据后 ,进行测量 ( 3 )如果在轧 制规范 中没有定义单位 附 据 进行采集 ,采集满 3 加张力, 则计算机架单位附加张力近似值;注:
在道次计算中也对单位附加张力进行计算,其 计算结果一般与轧制规范中定义的单位张力相 同或者等于此机架前后张力的极限值减 去 ̄ L @ I J 规范中定义的单位 张力。
( 7 )调用模 型系数修 正,得到修 正后的 是建立在生产工艺经验数据 、轧制规范、数学
( 4 )计算张力修正系数和 轧辊压扁率 。 ( 5 )将单位 附加张力与 张力修正系 数相 乘 ,得到新的单位附加张力。
( 6 )对 于 厚 带头 情 况 下 的单 位 附 加 张 力 ,
在 过程 计算机 中 的张力 计算 主要用 到 了
轧制模 型和 磨擦 系数 计算 以及神经 网络系数修
( 1 + ( we a r _ O / ( 1 一 we a r we a r _ 1 ) 、 ( 1 + l n ( h / f _ O ) f J 1
基于Control Logix的实验室张紧辊控制系统设计
基于Control Logix的实验室张紧辊控制系统设计
赵立辉;陈晓英;白锐;金凤
【期刊名称】《中国现代教育装备》
【年(卷),期】2013(000)023
【摘要】以张紧辊为控制对象,在Rockwell工业控制网络实验室设计张紧辊控
制系统,包括对象组态、程序调试及界面开发。
通过对现有设备探索新的实验项目,丰富了实验内容和教学手段,促进了学生参加实践教学的热情,提高了学生的动手能力和创新能力。
【总页数】3页(P48-50)
【作者】赵立辉;陈晓英;白锐;金凤
【作者单位】辽宁工业大学电气工程学院辽宁锦州 121001;辽宁工业大学电气工
程学院辽宁锦州 121001;辽宁工业大学电气工程学院辽宁锦州 121001;辽宁工业
大学电气工程学院辽宁锦州 121001
【正文语种】中文
【相关文献】
1.箔材轧机工作辊、支撑辊、张紧辊轴承箱油雾润滑温度控制系统的设计改造 [J], 李旺太;于永春
2.箔材轧机工作辊、支撑辊、张紧辊轴承箱油雾润滑温度控制系统的设计改造 [J], 李旺太;于永春
3.6RA80调速装置在张紧辊控制系统中的应用 [J], 裴云;朱海云;高祥锋;朱英韬
4.基于Control Logix5000控制器的风机变频系统设计 [J], 朱新平;郭利进;胡田
力;吕亚锋
5.基于状态空间的张紧辊间张力预警模型分析与控制 [J], 刘欣
因版权原因,仅展示原文概要,查看原文内容请购买。
张力辊控制原理
张力辊控制原理嘿,你有没有想过,在那些大型的生产线上,比如说造纸厂或者钢铁厂,那些长长的材料像是纸张或者钢带是怎么保持合适的张力的呢?这就不得不提到张力辊这个神奇的东西啦。
我有个朋友叫小李,在一家造纸厂工作。
有一次我去他厂里参观,看到那些纸张在机器里快速地传输着,就像是一条白色的河流在流淌。
我就好奇地问他:“这纸张跑得这么快,怎么就不会突然松了或者太紧扯断了呢?”小李嘿嘿一笑,就把我带到了张力辊旁边。
张力辊啊,就像是一个严格的交通警察,在控制着纸张这条“交通要道”上的秩序。
它的控制原理其实还挺有趣的。
你看啊,就好比我们骑自行车的时候,要是链条太松了,骑起来就没劲儿,还容易掉链子;要是太紧了呢,骑着就特别费劲,还会磨损零部件。
这纸张的张力也是这个道理。
在整个生产系统里,有传感器就像小侦探一样。
这些传感器会时刻检测纸张的张力情况。
要是纸张的张力变小了,就好像是一个人走路没了力气一样。
这时候呢,控制系统就会像一个聪明的指挥官,给电机发出指令。
电机接到指令后,就会调整张力辊的转速。
比如说,它会让张力辊转得快一点,就像你在拉着一个东西的时候,加快你的步伐,这样就能把纸张拉紧了。
再比如说,我曾经见过一个小作坊,他们没有这种先进的张力辊控制设备。
结果呢,生产出来的东西那叫一个乱啊。
材料一会儿松松垮垮的,一会儿又紧得不像话。
就像一群没有纪律的士兵,乱成一团。
而有了张力辊的精确控制就完全不一样了。
我又问小李:“那这个张力辊的控制精度能有多高呢?”小李得意地说:“那可高了去了。
就像你用天平称东西一样精确。
”你想啊,在那些高精度的生产过程中,哪怕是一点点的张力误差,都可能导致产品出现大问题。
比如说在生产电子线路板的基片材料时,如果张力不对,可能会使线路的精度受到影响,这就好比你在画画的时候,纸张老是乱动,你能画出好画吗?肯定不行啊。
而且啊,张力辊的控制还不是一成不变的。
因为生产过程中会有各种变化。
比如说不同的材料厚度、不同的生产速度等等。
主从控制在辊道提升控制中的实现
主从控制在辊道提升控制中的实现作者:玄振龙徐豪杰王亮来源:《科学与财富》2017年第09期摘要:本文介绍了提升辊道中主从控制通过西门子变频器的实现,简要介绍了主从控制的工作原理和实现方案,以及如何通过DriveMonitor来实现电机的参数调试和控制性能的优化。
关键词:主从控制;模拟量输入输出;调试在变频器的应用中,有很多场合需要进行主从控制,当一个传动设备是由两个或多个电机驱动的时候,就需要通过主从控制来分配各个电机间的负荷使其达到均匀平衡,以满足对传动点的控制精度。
一、提升辊道系统简介莱钢型钢厂大H型钢生产线串列轧机,用来传送轧件的工作辊道的头5个辊是升降辊,它们用于调整辊道高度来满足不同高度的轧件,辊道的调整是由2台电机通过齿轮和螺旋千斤顶完成的。
2台电机分别位于调整辊道的两边,电机中间共用一根传动轴,两台电机共同转动来带动齿轮和螺旋千斤顶,以达到高度调整的目的。
两台电机的方向和转速必须完全一致,才能够确保机械机构转动,辊道实现升降,因此要求电机能够达到同步。
控制采用西门子逆变器控制,两侧电机选择功率型号完全一样的电机,相应的逆变器也完全一样,这样便于同步控制。
二、主从控制的工作原理简介主从应用中主传动装置是典型的速度控制,因为主传动和从传动的电机轴通过齿轮和机械轴相互固定地连接,所以从传动与主传动之间不能有速度差,从传动使用转矩控制,其工作时只负责输出一定比例的转矩以减少主传动的负荷,整个传动的速度控制由主传动来完成,主传动装置运转时的转矩值作为给定发给从传动,从传动跟随着主传动的速度调节动作进行转矩调节,来实现两侧电机的同步动作。
三、主从控制的实现主从控制的关键技术问题是如何把主传动的速度信号或转矩信号高速和精确地传送到从传动变频器,提升辊道选用的西门子的6SE70变频器,实现方法是通过模拟量输入输出(AI/AO)连接实现主从控制。
6SE70变频器的CUVC控制板上集成有可编程的AI和AO,主传动的速度或转矩信号可以通过AO口转换成标准的4~20mA信号输出,而从传动则是通过AI口接收主传动发来的速度或转矩给定值。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
式中: J 表示速度损失量, 表示张力辊的速
4 结语
通过在冷连轧的调试和运行充分证明,张力辊 在连续作业的冷连轧机组中得到较精确的张力值 及张力变化规律,从而能更好地控制张力,使整个 机组的张力得到合理的匹配。这对于提高产品的质 量,降低整个机组的能耗有着十分重要的意义。 (1)
转矩与电流的关系通过下面的电机公式计算得出:
本文介绍的张力辊的主要功能是在生产轧制过 程中保证活套入口的带钢张力稳定。从结构上看双 闭环系统是一个以电流调节作为内环,以转速调节 作为外环的转速、电流双闭环调节系统。该系统由 转速调节器、电流调节器、触发系统、电流传感 器、脉冲编码器等组成。其中,为了使转速和电流 两种反馈分别起作用,各种补偿的转矩转换成电流 图1 张力辊速度控制系统 此系统中以M2电机为主,而M1电机为从。M1有 以下特点:通过电缆连接,将M2的速度调节器的输 57
2012 年第 32/35 期 (总第 239/242 期)
NO.32/35.20121 (CumulativetyNO.239/242)
基于主从控制思想的入口张力辊控制系统的应用
张 磊
(江西新余钢铁集团有限公司, 江西 新余 338000)
文章主要论述了在冷连轧控制系统中入口张力辊的应用。: 制方式不断改进,通过新型双闭环的设计使用,并在实践中得到了理想的控制效果。 冷连轧 ; 张力辊 ; 双闭环 关键词 : TM571 文献标识码 : A 文章编号 : 1009-2374(2012) 32-0057-02 中图分类号 :
3.1 转矩与电流的转换关系
3.2 角速度给定
角速度给定通过下面的计算公式得出:
× i× 1000 d
(2)
式 中 : (rpm) 表 示 角 速 度 , (mpm) 表 示 线 速 度, i 表示减速比, d (mm) 表示辊径。
3.3 转矩给定
张力辊的转矩给定通过下面的关系得出:
Tem CT NIa K Ia
式中: K CT N 。
张力辊电机转矩给定值,送到张力辊电机全数 字调速系统SPDM,并通过活套调速系统的调节作 用,控制电机的负载电流,在张力辊正常工作中, 速度调节器饱和使电机处于转矩控制状态,从而实 现张力辊的张力控制。
2 入口段张力辊设备结构及性能
入口段张力辊的作用是分隔开卷段张力和入口 活套张力。此张力辊由辊子、底座、压辊、传动装 置组成。传动装置由减速机、制动器和直流电机组 成;该张力辊由两台辊子组成,呈S形布置,保证 所需要的钢带包角。按照钢带行走的方向,这两台 辊子分别称为1号辊和2号辊。
3 入口张力辊的控制
T T1 T2 T3
(3)
式 中 : T1 表 示 弯 曲 转 矩 , T2 表 示 惯 量 补 偿 转 矩, T3 表示损失转矩。
T1 Hb × h2 × b ×d
(4)
式 中 : Hb 表 示 硬 度 , h 表 示 厚 度 , b 表 示 宽 度, d 表示辊径。其中硬度的单位是 N/m 2 ,由辊的 材料决定。 (5) T2 J × a 式中: J 表示转动惯量, a 表示角加速度。转 动惯量 J mi × ri 2 , mi 表示刚体的某个质点的质 量, ri 表示该质点到转轴的垂直距离。转动惯量只 决定于刚体的形状、质量分布和转轴的位置,而同 刚体绕轴的转动状态(如角速度的大小)无关。规 则形状的均质刚体,其转动惯量可直接计算。不规 则刚体或非均质刚体的转动惯量,一般用实验法测 定。转动惯量应用于刚体各种运动的动力学计算 中。 a 由电机轴决定。 × T3 J 度。 T3 通常是正值。 (6)
1 概述
冷连轧过程中,带钢不仅受到轧辊的轧制压 力,而且还承受张力。带钢张力对压下率和板形有 很重要的作用。由于张力辊(又称S辊)是机组的 重要设备单元,带钢包绕在张力辊上,在其包绕接 触处(即包角处)产生摩擦力,正是这个摩擦力, 使出口张力与入口张力按某种规律变化,借此改变 张力值。
与转速调节器的输出叠加作为电流调节器的输入, 再用电流调节器的输出去控制触发系统。 该张力辊电机采用主从控制,2号辊电机为 主,1号辊电机为从。两台电机都是速度控制系 统,速度给定值由操作人员根据工艺需要设定。主 电机的速度信号作为从电机的补偿附加力矩信号给 定。这样就实现了主辊和从辊的速度跟随,同时也 实现了电机输出力矩的平衡。通过控制该张力辊的 速度,实现了带钢进入活套的速度控制。配合PLC 的逻辑程序控制,实现了入口段点动、入口段爬 行、入口段加减速、入口段同步,从而实现穿带、 甩尾、充套、放套、同步运行等功能。 双闭环具体控制框图如图1所示:
出附加到M1的转矩给定上,这样主从电机共用一个 速度环,提高了响应速度;对于速度调节器来说, 只是比例调节器,同样也是为了提高响应速度,使 从电机快速跟随主电机的变化而变化。 控制思想:为了实现主辊和从辊的速度跟随和 输出力矩的平衡,采用主电机转速调节器的输出速 度信号百分比,经过限值和计算,转化为转矩信号 叠加在从电机的补偿转矩给定上。当主辊所承受的 负载发生波动时,会影响主电机的实际转速,造成 转速调节器的输出信号发生变化,这个信号的变化 会及时地反馈到从辊的补偿转矩给定上,从而改变 了从电机的电流给定值,从辊的力矩输出会发生相 应的变化。这样就实现了另外一个闭环控制,即电 流的闭环控制。 点动时电机为速度控制系统,速度环与电流环 同时参与控制;建张时,速度给定为零;此时, 电流调节器控制着电机的电流给定。一般情况下, 主电机和从电机都不做电流限幅,以便于在加减速 时,实现电机力矩的满负荷输出,达到快速响应的 目的。 速度给定:线速度给定值来自程序中的运算, 根据设定的入口段工艺速度转化为百分比后给定速 度输入环。点动时,线速度给定为一定值,点动包 括正点动与反点动。补偿转矩给定:补偿转矩给定 包括:弯曲转矩,惯量补偿,损失转矩。依据机械 设备自身的动能损失,补偿电机的电流给定,增加 了电机力矩输出的准确性,也增加了电机的力矩响 应速度。