I2C 24CXX驱动程序(真正实用 全)
模拟IIC驱动24C02
MC430F14例程:模拟IIC驱动24C02这是国内卖得最为火热的MSP430单片机实验板之一!【作者】: 微控设计网DC版主原创【例程简介】: 利用MC430F14开发板上MSP430与AT24C02进行IIC总线模拟实验。
MSP430模拟IIC向AT24C02写入4个字节数据,然后读出4个字节.最后做数据校验。
如果读出来的数据与写入的原数据相同,则D2-LED会亮.否则D2-LED不亮。
【例程】://基于MC430F14开发板实验例程#include "msp430x14x.h"#include "define.h"//IIC总线操作成失标志#define error 0x01 //错误#define right 0x00 //正确#define AT24_ADD 0xA0 //24c02芯片地址#define write 0x00 //写#define read 0x01 //读#define Quantity 4 //操作数量#define incept_add 0x00 //操作内部地址首址//写入AT24C02数据表unsigned char write_table[4]={'a','b','c','d'};//读出AT24C02数据缓冲区unsigned char read_Buff[4]={'x','x','x','x'};unsigned char iic_check; //检查标志,可选的.//******************************************************//MSP430F14初始化void init (void){P1DIR |= BIT1; //LED输出P1OUT |= BIT1; //关LED}//******************************************************//软延时void delay(unsigned int n){ unsigned int k;for(k=0;k<n;k++);}//******************************************************//检验两组数据是否正确,如在检验数据中有一组不正确,则退出.//*Data_REF参考值数组,*Data_CHK被检验数组,n检验数量//并返回一个成败标志.unsigned char data_check(unsigned char *Data_REF, unsigned char *Data_CHK, unsigned char n){ unsigned char chk ;while(n){if(Data_REF[n-1]==Data_CHK[n-1]) //进行校对{ chk = right; //正确n--; //下一位}else{ chk = error; //校对有错continue; //马上退出}}return chk ; //返回校对成败标志.}//******************************************************void main(void){WDTCTL=WDTPW+WDTHOLD; //停止WDTinit(); //初始化//向AT24C02芯片写入4字节数据iic_check=IIC(write_table,Quantity,incept_add,(AT24_ADD|write));delay(600); //写入后,做一个适当的延时//向AT24C02芯片读出4字字节数据iic_check=IIC(read_Buff,Quantity,incept_add,(AT24_ADD|read));//判别校验是否成功if(!(data_check(write_table,read_Buff,Quantity)))P1OUT ^= BIT1; //LED亮则表示IIC总线写读操作成LPM1; //最后进入低功耗模式1}//******************************************************。
I2C24LC02C读写例程(PIC单片机)

I2C24LC02C读写例程(PIC单片机)I2C 24LC02 C读写例程(PIC单片机)[单片机]发布时间:2008-04-22 10:11:001 I2C总线特点I2C总线最主要的优点是其简单性和有效性。
由于接口直接在组件之上,因此I2C总线占用的空间非常小,减少了电路板的空间和芯片管脚的数量,降低了互联成本。
总线的长度可高达25英尺,并且能够以10Kbps的最大传输速率支持40个组件。
I2C总线的另一个优点是,它支持多主控(multimastering),其中任何能够进行发送和接收的设备都可以成为主总线。
一个主控能够控制信号的传输和时钟频率。
当然,在任何时间点上只能有一个主控。
2 I2C总线工作原理I2C总线上的数据稳定规则,SCL为高电平时SDA上的数据保持稳定,SCL为低电平时允许SDA变化。
如果SCL处于高电平时,SDA 上产生下降沿,则认为是起始位,SDA上的上升沿认为是停止位。
通信速率分为常规模式(时钟频率100kHz)和快速模式(时钟频率400kHz)。
同一总线上可以连接多个带有I2C接口的器件,每个器件都有一个唯一的地址,既可以是单接收的器件,也可以是能够接收发送的器件。
每次数据传输都是以一个起始位开始,而以停止位结束。
传输的字节数没有限制。
最高有效位将首先被传输,接收方收到第8位数据后会发出应答位。
数据传输通常分为两种:主设备发送从设备接收和从设备发送主设备接收。
这两种模式都需要主机发送起始位和停止位,应答位由接收方产生。
从设备地址一般是1或2个字节,用于区分连接在同一I2C上的不同器件。
I2C总线在传送数据过程中共有三种类型信号,它们分别是:开始信号、结束信号和应答信号。
开始信号:SCL为高电平时,SDA由高电平向低电平跳变,开始传送数据。
结束信号:SCL为高电平时,SDA由低电平向高电平跳变,结束传送数据。
应答信号:接收数据的IC在接收到8bit数据后,向发送数据的IC 发出特定的低电平脉冲,表示已收到数据。
I2C程序(AT24C1024)测试通过的
_nop_();
}
//*********************************************
//从机接收一位数据应答0
//*********************************************
voidACK(void)
{
SDA=0;
_nop_();
//从机接收到最后一位数据应答1
//*********************************************
voidNoACK(void)
{
SDA=1;
_nop_();
_nop_();
_nop_();
SCL=1;
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
void stop(void)
{//发送停止条件的数据信号
SDA=0;
_nop_();
_nop_();
SCL=1;//发送停止条件的时钟信号
_nop_();
_nop_();
_nop_();
_nop_();
_nop_();
SDA=1;//发送I2C总线停止信号
_nop_();
_nop_();
_nop_();
void write_1024(uchar send[])
{
int i;
start();
write_byte(0xa0);//启动总线
check_ACK();//发送器件地址
write_byte(0x00);//发送器件片内高8位地址
check_ACK();//检查从机是否应答
使用计算机串口读写24CXX
使用计算机串口读写24CXX
要使用计算机串口读写24CXX芯片,您可以按照以下步骤进行操作:
1.确保您的计算机具备串口功能,并且已经正确安装了串口驱动程序。
您可以在计算机的设备管理器中确认串口的存在和工作状态。
2.连接24CXX芯片到计算机的串口上。
24CXX芯片通常采用I2C总线
通信协议,需要通过串口与计算机进行通信。
您可以使用串口转I2C模块
将串口信号转换为I2C信号,然后连接到24CXX芯片上。
3. 在计算机上编写串口通信的程序。
您可以使用C、C++、Python等
编程语言来编写程序。
具体编程语言和操作系统平台有关。
4.打开串口,并设置串口通信参数。
在程序中使用相应的函数或API
打开串口,并设置波特率、数据位、停止位和校验位等参数。
一般情况下,24CXX芯片使用的I2C总线通信速率为100kHz或400kHz。
5.发送读写命令并接收数据。
通过向串口发送相应的读写命令,可以
实现对24CXX芯片中数据的读取和写入。
具体的读写命令格式和协议可以
参考24CXX芯片的数据手册或规格书。
6.处理读写数据。
接收到的数据可以存储在计算机内存中,或者直接
进行处理和显示。
需要注意的是,串口读写24CXX芯片的具体实现过程会受到芯片型号、计算机操作系统、编程语言和开发环境等因素的影响。
因此,您可能需要
参考相关的文档和示例代码来进行具体实现。
24Cxx I2C EEPROM字节读写驱动程序

_nop_();_nop_();_nop_();_nop_();_nop_();_nop_(); //Thd:STA
SCL=0; //START
write_8bit(0xa0 | page); //写页地址和操作方式,对于24C32-24C256,page不起作用
ACK(ห้องสมุดไป่ตู้;
if(eepromtype>IIC24C16) //如果是24C01-24C16,地址为一字节;24C32-24C256,地址为二字节
调用方式:void WriteIIC_24CXX(enum EEPROMTYPE eepromtype,unsigned int address,unsigned char ddata) ﹫2001/09/18
函数说明:对于IIC芯片24CXX,在指定地址address写入一个字节ddata
SDA=0;
_nop_();_nop_();_nop_();_nop_();_nop_();_nop_(); //Thd:STA
SCL=0; //START
write_8bit( (address<<1) | 0x01); //写页地址和操作方式
ACK();
while (i--)
{
SDA=1;
#include "reg51.h"
#include "intrins.h"
sbit SCL= P2^7;
sbit SDA= P2^6;
enum EEPROMTYPE {IIC24C01,IIC24C01A,IIC24C02,IIC24C04,IIC24C08,IIC24C16,IIC24C32,IIC24C64,IIC24C128,IIC24C256};
I2C总线 24C02芯片的读写应用

I2C总线24C02芯片的读写应用什么是I2C总线?I2C(Inter-Integrated Circuit)总线是一种由PHILIPS公司开发的两线式串行总线,用于连接微控制器及其外围设备。
也可以简单地理解为I2C是微控制器与外围芯片的一种通讯协议。
在不同的书籍中,可能会称为I2C,IIC,或者I平方C,但是概念也是一样的,只是叫法不同。
一﹑I2C总线特点I2C总线的优点非常多,其中最主要体现在1:硬件结构上具有相同的接口界面;2:电路接口的简单性;3:软件操作的一致性。
I2C总线占用芯片的引脚非常的少,只需要两组信号作为通信的协议,一条为数据线(SDA),另一条为时钟线(SCL)。
因此减少了电路板的空间和芯片管脚的数量,所以降低了互联成本。
总线的长度可高达25英尺,并且能够以10Kbps 的最大传输速率支持40个组件。
I2C总线还具备了另一个优点,就是任何能够进行发送和接收数据的设备都可以成为主控机。
当然,在任何时间点上只能允许有一个主控机。
图5-20(总线连接图)二﹑I2C总线工作原理图5-20为I2C总线的连接图。
I2C总线是由数据线SDA和时钟线SCL构成的串行总线,可发送和接收数据。
在单片机与被控IC之间,最高传送速率100kbps。
各种I2C器件均并联在这条总线上,就像电话线网络一样不会互相冲突,要互相通信就必须拨通其电话号码,每一个I2C模块都有唯一地址。
并接在I2C总线上的模块,既可以是主控器(或被控器),也可以是发送器(或接收器),这取决于它所要完成的功能。
I2C总线在传送数据过程中共有四种类型信号,它们分别是:起始信号、停止信号﹑应答信号与非应答信号。
三﹑I2C总线数据的传送规则起始信号:在I2C总线工作过程中,当SCL为高电平时,SDA由高电平向低电平跳变,定义为起始信号,起始信号由主控机产生。
如图5-21所示图5-21(开始信号)停止信号:当SCL为高电平时,SDA由低电平向高电平跳变,定义为停止信号,此信号也只能由主控机产生。
串行i2c总线e2prom at24cxxx的应用.
9.串行I2C总线E2PROM AT24CXXX的应用这一篇介绍I2C存储器的使用。
主要是介绍AT24CXX系列器件,它分为两类,主要是通过被存储容量地址来分的,一类是AT24C02-AT24C16,它的存储容量从256字节到2048字节。
另一类是AT24C32-AT24C1024,容量从4K-128K。
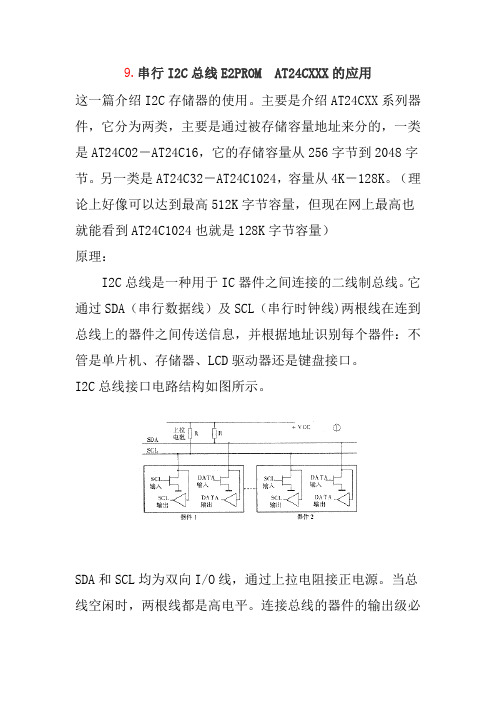
(理论上好像可以达到最高512K字节容量,但现在网上最高也就能看到AT24C1024也就是128K字节容量)原理:I2C总线是一种用于IC器件之间连接的二线制总线。
它通过SDA(串行数据线)及SCL(串行时钟线)两根线在连到总线上的器件之间传送信息,并根据地址识别每个器件:不管是单片机、存储器、LCD驱动器还是键盘接口。
I2C总线接口电路结构如图所示。
SDA和SCL均为双向I/O线,通过上拉电阻接正电源。
当总线空闲时,两根线都是高电平。
连接总线的器件的输出级必须是集电极或漏极开路,以具有线“与”功能。
I2C总线的数据传送速率在标准工作方式下为100kbit/s,在快速方式下,最高传送速率可达400kbit/s。
在I2C总线技术规范中,开始和结束信号(也称启动和停止信号)的定义如图所示。
当时钟线SCL为高电平时,数据线SDA由高电平跳变为低电平定义为“开始”信号;当SCL 线为高电平时,SDA线发生低电平到高电平的跳变为“结束”信号。
开始和结束信号都是由主器件产生。
在开始信号以后,总线即被认为处于忙状态;在结束信号以后的一段时间内,总线被认为是空闲的。
I2C总线的数据传送格式是:在I2C总线开始信号后,送出的第一个字节数据是用来选择从器件地址的,其中4-7位为器件码,如1010就是代表串行E2PROM器件。
1-3位为存储器的片选地址或存储器内的块地址码,如何区分?后面再做详细说明,第8位为方向位(R/W)。
方向位为“0”表示发送,即主器件把信息写到所选择的从器件;方向位为“1”表示主器件将从从器件读信息。
单片机模拟I2C总线读写EEPROM(24CXX)程序一

单片机模拟I2C总线读写EEPROM(24CXX)程序一下面是一个最简单的读写程序,可以用来检测线路状况。
先附上程序和电路,后面附有说明。
电路:说明:P2 口的LED 都是我用来检测电路执行到哪一步的,个人觉得一目了然。
程序:#include #define unit unsigned int#define uchar unsigned charint ok;sbit scl=P0;sbit sda=P0;sb it led0=P2;sbit led1=P2;sb it led2=P2 ;sbit led3=P2;sb it led4=P2;sb it led5=P2 ;sbit led6=P2;sb it led7=P2;delay(void) //delay{ int i; led1=1; for(i=0;istart(void) //start{ sda=1; scl=1; delay(); sda=0; delay(); scl=0; led0=0;}stop(void) //stop{ sda=0; scl=1; delay(); sda=1; delay(); scl=0;}checkanswer(void) //check answer{ sda=1; scl=1; if(sda==1) { F0=1; led7=0; } scl=0; led3=0;}sendabyte(int temps) //send a byte{ uchar n=8; while(n--) { led2=1; if((temps&0x80)==0x80){ sda=1; scl=1; delay(); scl=0;}else{ sda=0; scl=1; delay(); scl=0;}temps=tempsreciveabyte() //recive a byte{ uchar n=8,tempr; while(n--) {//uchar idata *abyte scl=1;tempr=temprmain(void) //MAIN{start();sendabyte(0xa0);checkanswer();if(F0==1) return;sendabyte(0x00);checkanswer();if(F0==1) return;sendabyte(0x11);checkanswer();if(F0==1) return;/*-----------------------*/start(); sendabyte(0xa0);checkanswer();if(F0==1) return;。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#define _24cXX_H/* Includes ----------------------------------------------------------------*/#include "stm32f10x.h"#include "value.h"//#include "stdbool.h"/* Define ------------------------------------------------------------------*//* EEPROM Addresses defines *///注:32 64 的字地址是16位2个字节如果使用32或64请简单修改驱动即可#define WC24cXX 0x00 // 器件地址写#define RC24cXX 0x01 // 器件地址读#define USE_24C08 //使用24C08#ifdef USE_24C02#define MAXSIZE24cXX 256 // 总容量Bytes //级联时请修改本参数和硬件驱动#define BLOCK_SIZE 256 // 块容量Bytes#define I2C_PAGESIZE 8 // 8个字节每页#endif#ifdef USE_24C04#define MAXSIZE24cXX 512 // 总容量Bytes //级联时请修改本参数和硬件驱动#define BLOCK_SIZE 256 // 块容量Bytes#define I2C_PAGESIZE 16 // 16个字节每页#endif#ifdef USE_24C08#define MAXSIZE24cXX 1024 // 总容量Bytes //级联时请修改本参数和硬件驱动#define BLOCK_SIZE 256 // 块容量Bytes#define I2C_PAGESIZE 16 // 16个字节每页/* user define */#define YBCV_ADDR_0 0x0000 //定义仪表控制数据结构体的EEPROM存储地址0#define YBCV_ADDR_1 0x0200 //定义仪表控制数据结构体的EEPROM存储地址1#define EEPROM_VERIFY YB_CTRL_V ALE_SIZE //EEPROM仪表通道修正参数存储地址#endif#ifdef USE_24C16#define MAXSIZE24cXX 2048 // 总容量Bytes#define I2C_PAGESIZE 16 // 16个字节每页#endif#define MAXSIZE24cXX 4096 // 总容量Bytes //级联时请修改本参数和硬件驱动#define BLOCK_SIZE 4096 // 块容量Bytes#define I2C_PAGESIZE 32 // 16个字节每页#endif#ifdef USE_24C64#define MAXSIZE24cXX 8192 // 总容量Bytes //级联时请修改本参数和硬件驱动#define BLOCK_SIZE 8192 // 块容量Bytes#define I2C_PAGESIZE 32 // 16个字节每页#endif#define I2CInit I2C_GPIO_Config#define SCL(a) if (a) \GPIO_SetBits(GPIOB, GPIO_Pin_10);\else \GPIO_ResetBits(GPIOB,GPIO_Pin_10)#define SDA(a) if (a) \GPIO_SetBits(GPIOB, GPIO_Pin_11);\else \GPIO_ResetBits(GPIOB,GPIO_Pin_11)#define SCLO GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_10)#define SDAO GPIO_ReadInputDataBit(GPIOB, GPIO_Pin_11)/* Private ------------------------------------------------------------------*//* Public -------------------------------------------------------------------*//*uint idata ucSendBuffer[8]={0x01,0x02,0x04,0x08,0x10,0x20,0x40,0x80};uint idata ucReceData;uint idata ucReceiveBuffer[8];//从器件中读出的多字节数据暂存区*//* Function Declaration -----------------------------------------------------*/extern bool I2C2_Init(void);//I2C初始化//extern bool I2C_ByteWrite(u8* pBuffer, u8 WriteAddr); //向24cXX中写入1个字节extern bool I2C_PageWrite(u8* pBuffer, u8 BlockCode, u16 WriteAddr, u8 n); //24cXX 页写(不超过一页)extern bool I2C_BlockWrite(u8* pBlock, u8 BlockCode, u16 WriteAddr, u16 n);//24cXX数据块写(不超过BLOCK_SIZE个字节)extern bool I2C_BufferWrite(u8* pBuffer, u16 WriteAddr, u16 n); //24cXX数据写(不超过MAXSIZE24cXX个字节)extern bool I2C_BufferRead(u8* pBuffer, u16 ReadAddr, u16 n); //从24cXX中读出N 字节数据(不超过MAXSIZE24cXX个字节)//extern void I2C_EE_WaitEepromStandbyState(void); //等待24CXX内部写周期结束#endif /*_24cXX_H*//******************** (C) COPYRIGHT 2015 XXXXX *********************************** 文件名:24cXX.c* 描述:本函数是xx项目的24cXX的读写函数* 平台:Keil 4 MDK \ stm32 3.5.0库* 库版本:基于野火相关资料及程序上优化修改* 作者:天涯月下红颜醉* 时间:2015.4.19******************************************************************************* ***//* Includes ------------------------------------------------------------------*/#include "24cXX.h"#include "value.h"#include "systick.h"#include <stdlib.h>/** 函数名:I2C2_Init* 描述:I2C2初始化* 输入:无* 输出:无* 调用:内部调用*/bool I2C2_Init(void){bool s = true;GPIO_InitTypeDef GPIO_InitStructure;/* 使能与I2CGPIO 有关的时钟*/RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB,ENABLE);/* PB10-I2C2_SCL、PB11-I2C2_SDA*/GPIO_InitStructure.GPIO_Pin = GPIO_Pin_10 | GPIO_Pin_11;GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_InitStructure.GPIO_Mode = GPIO_Mode_Out_OD; // 普通开漏输出GPIO_Init(GPIOB, &GPIO_InitStructure);SDA(1);SCL(1);Delay_nop();Delay_nop();if(!SDAO) s = false;if(!SCLO) s = false;SDA(0);Delay_nop();Delay_nop();if(SDAO) s = false;SCL(0);Delay_nop();SDA(0);SCL(0);Delay_nop();Delay_nop();if(SDAO) s = false;if(SCLO) s = false;SCL(1);Delay_nop();Delay_nop();SDA(1);return s;}/********开启24cXX的I2C总线********/static bool I2CStart(void){SDA(1);SCL(1);Delay_nop();Delay_nop();if(!SDAO)return false; //SDA线为低电平则总线忙,退出SDA(0);Delay_nop();Delay_nop();if(SDAO)return false; //SDA线为高电平则总线出错,退出SCL(0);Delay_nop();return true;}/********关闭24cXX的I2C总线*******/static void I2CStop(void){SDA(0);SCL(0);Delay_nop();Delay_nop();SCL(1);Delay_nop();Delay_nop();SDA(1);}/*********发送ACK*********/static void I2CAck(void){SDA(0);SCL(0);Delay_nop();// Delay_nop();SCL(1);Delay_nop();// Delay_nop();SCL(0);}/*********发送NO ACK*********/static void I2CNoAck(void){SDA(1);SCL(0);Delay_nop();// Delay_nop();SCL(1);Delay_nop();// Delay_nop();SCL(0);}/*********读取ACK信号*********/static bool I2CWaitAck(void) //返回为:1=有ACK,0=无ACK{SCL(0);SDA(1); //设置SDA为输入Delay_nop();// Delay_nop();SCL(1);Delay_nop();// Delay_nop();if(SDAO){SCL(0);return false;}SCL(0);return true;}/************MCU向24cXX发送一个字节数据*************/ static void I2CSendByte(u8 demand) //数据从高位到低位//{u8 i=8;while(i--){SCL(0);Delay_nop();SDA((bool)(demand&0x80));demand<<=1;Delay_nop();// Delay_nop();SCL(1);Delay_nop();// Delay_nop();}SCL(0);}/*********MCU从24cXX读入一字节数据*********/static u8 I2CReceiveByte(void) //数据从高位到低位//{u8 i=8;u8 ddata=0;SDA(1); //设置SDA为输入while(i--){ddata<<=1; //数据从高位开始读取SCL(0);Delay_nop();// Delay_nop();SCL(1);Delay_nop(); //从高位开始ddata|=SDA;ddata<<=1// Delay_nop();if(SDAO){ddata|=0x01;}}SCL(0);return ddata;}/** 函数名:I2C_EE_WaitEepromStandbyState* 描述:Wait for EEPROM Standby state* 输入:无* 输出:无* 返回:无* 调用:*/static void I2C_EE_WaitEepromStandbyState(u8 BlockCode){int i = 50;do{Delay_us(100);I2CStart();I2CSendByte(BlockCode | WC24cXX);//发送器件地址写}while(I2CWaitAck() == 0 && i-- > 0);I2CStop();}/****************向24cXX中写入1个字节****************/ /*static bool I2C_ByteWrite(u8* pBuffer, u8 WriteAddr){I2CStart();//启动I2CI2CSendByte(WC24cXX);//发送器件地址写return false;I2CSendByte(WriteAddr);if(I2CWaitAck() == 0)return false;I2CSendByte(*pBuffer);if(I2CWaitAck() == 0)return false;I2CStop();return true;}*//** 函数名:I2C_PageWrite* 描述:在EEPROM的一个写循环中可以写多个字节,但一次写入的字节数* 不能超过EEPROM页的大小。