基于奇异指数的地磁辅助导航路径规划算法
奇异谱分析在地磁数据研究中的应用

第40卷 第2期2021年5月 世 界 地 质GLOBALGEOLOGYVol 40 No 2May2021 文章编号:1004—5589(2021)02—0459—08奇异谱分析在地磁数据研究中的应用于畅1,2,路来君1,于洪池3,吕铁鑫4,魏美璇5,陈卓21 吉林大学地球科学学院,长春130061;2 吉林省地震局吉林地震台,长春130117;3 吉林省地震局合隆地震台,长春130200;4 吉视传媒股份有限公司四平分公司,吉林四平136000;5 吉林省地震局信息中心,长春130117摘要:为验证奇异谱分析在地磁数据中的拟合效果,笔者选取2017年1月至2019年7月吉林省长春地磁台FHDZ M15仪采集的Z、H、D、F4个分量进行奇异谱分析。
通过构造轨迹矩阵、分解奇异值和重构序列等步骤提取信号的趋势项和噪声等成分,得出原始序列奇异谱分析拟合值。
构建原始序列的一元线性回归分析作为对比模型并计算拟合值,运用RMSE(均方根误差)、MAE(平均绝对误差)和MSPE(均方百分比误差)3项误差评价指标对奇异谱分析和一元线性回归分析的拟合结果进行误差分析,结果表明奇异谱分析拟合结果具有更高的精度。
构建ARMA模型并对奇异谱拟合后的序列进行数值预测,给出置信区间并分析预测性能。
ARMA预测模型显示,预测值序列与原始序列的变化趋势一致,且预测值均未超出置信区间的范围,表明在预测期内将无地磁异常发生。
关键词:奇异谱分析;一元线性回归分析;ARMA模型;数值拟合;地磁数据中图分类号:P318 文献标识码:A doi:10 3969/j issn 1004 5589 2021 02 024收稿日期:2020 12 11;改回日期:2021 03 12基金项目:国家自然科学基金项目(41872243)通讯作者:路来君(1956—),男,教授,主要从事地学大数据处理及分析。
E mail:lulj1956@163 comApplicationofsingularspectrumanalysisingeomagneticdataresearchYUChang1,2,LULai jun1,YUHong chi3,LYUTie xin4,WEIMei xuan5,CHENZhuo21 CollegeofEarthSciences,JilinUniversity,Changchun130061,China;2 JilinSeismicStation,JilinEarthquakeAgency,Changchun130117,China;3 HelongSeismicStation,JilinEarthquakeAgency,Changchun130200,China;4 SipingBranch,JishiMediaCo.Ltd.,Siping136000,Jilin,China;5 InformationCenter,JilinEarthquakeAgency,Changchun130117,ChinaAbstract:Inordertoverifythefittingeffectofsingularspectrumanalysisingeomagneticdata,theauthorscon ductsingularspectrumanalysisbyusingZ,H,DandFcomponents,whichhavebeencollectedbytheFHDZ M15instrumentlocatedinChangchunGeomagneticStationduringtheperiodfromJanuary2017toJuly2019.Bycon structingtrajectorymatrix,decomposingsingularvaluesandreconstructingseries,weextractthetrendterm,noisetermandfinallyobtainthefittingvaluesoforiginalseries.Wecreateunarylinearregressionasacontrastmodelandcalculatethefittingvalues.RMSE(rootmeansquareerror),MAE(meanabsoluteerror)andMSPE(meansquarepercentageerror)havebeenusedtomakeerroranalysisonthefittingresultsofsingularspectrumanalysisandunarylinearregressionanalysis.Theresultsshowthatthefittingresultsofsingularspectrumanalysishavehigheraccuracy.TheARMAmodelhasbeenconstructedtomakevaluepredictiononthesingularspectrumfittingsequence.Theconfidenceintervalhasbeengivenandthepredictionperformancehasbeenanalyzed.ARMApre dictionmodelshowsthatchangesinthetrendofthepredictedvalueisconsistentwiththatoftheoriginalsequence,andthepredictedvaluedoesnotexceedtheconfidenceinterval,whichindicatesthattherewillbenogeomagneticanomalyinthepredictionperiod.Keywords:singularspectrumanalysis;unarylinearregression;ARMAmodel;valuefitting;geomagneticdata0 引言地磁又称“地球磁场”,是指地球周围空间分布的磁场。
基于迭代计算的地磁轮廓线匹配算法
基于迭代计算的地磁轮廓线匹配算法解伟男;李清华;奚伯齐;黄黎平;王常虹【摘要】针对惯性/地磁匹配组合导航系统,提出了一种基于迭代计算的地磁轮廓线匹配新算法,可以有效地修正惯导系统的初始位置误差和初始航向误差,并具有较高的实时性.首先以均方差准则建立匹配轨迹和实测地磁特征量的相关性约束,引入匹配曲线的参数化模型,通过泰勒展开并忽略高阶小项,将相关性约束简化为曲线平移位移和航向误差角的多变量表达式.然后依据相关性准则,将地磁匹配问题转化为以曲线平移位移和航向误差角为变量的非线性方程组的求解问题.采用牛顿迭代求解非线性方程组,实现地磁轮廓线匹配.最后仿真结果表明,基于迭代计算的地磁轮廓线匹配方法的最大匹配误差为传统轮廓线匹配方法的18.2%,为等值线约束迭代最近点匹配方法的7.8%,并且所提出的新方法耗时仅为5ms,满足实时匹配要求.【期刊名称】《中国惯性技术学报》【年(卷),期】2015(023)005【总页数】5页(P631-635)【关键词】地磁匹配;轮廓线匹配;迭代;均方差准则【作者】解伟男;李清华;奚伯齐;黄黎平;王常虹【作者单位】哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨150001;哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨150001;哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨150001;哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨150001;哈尔滨工业大学空间控制与惯性技术研究中心,哈尔滨150001【正文语种】中文【中图分类】V249.3地磁匹配导航以地球的基本物理场为基础,通过线图匹配实现导航定位,具有无源、无辐射、隐蔽性强、误差不随时间累积等众多优点,因此作为近年来新生的辅助惯性导航的手段,在确保武器系统导航信息的安全性、可靠性和自主性方面展现出了巨大的军事潜力[1-3]。
目前,地磁匹配算法主要分为两大类:第一类是轮廓线匹配算法,该算法具有原理简单,适用范围广,对初始误差要求低等优点。
地磁辅助惯性导航系统的数据融合算法

成为广泛使用的滤波模式,但线性化的过程不可避免产生处理
误差,如果局部线性的假设不成立时,这种非线性近似误差可 能会造成滤波器发散。为了解决这个问题,国外学者提出了采 样卡尔曼滤波(uKF)理论,并在多种试验中证明了它的优越性。
图1地磁辅助惯性导航方案
Fig.1 Scheme of geomagnetic aid INS
uKF的基础是u变换。u变换是指在满足某些约束方程(约束方程与状态变量统计特性相关)的条件下,给出一组加 权sigma点(采样点),并对每一个sigma点进行非线性变换,以变换点的均值和方差来逼近状态变量非线性变换的均值和 方差。通过使用UT方法,状态向量的分布得到近似,而不是对采用类似于EKF方法对状态方程和测量方程进行近似。
万方数据
2007年2月
中国惯性技术学报
仿真运动为匀速直线运动,每20 min利用匹
配位置信息滤波一次,匹配位置信息由相关匹配
算法得到,地磁匹配精度受磁探测器误差、地磁 0 u
0 V
图误差以及匹配算法误差的影响。每隔3h对惯导 求 蹬
Abstract:The theory of tlle geomagnetic aided inertial navigation systcm(INS)was蚰alyzed.The unscentcd KaIm觚 filtcring waS introduced a11d applied into me illtcgrated system.In unscented Kalman filterin岛t11e updating of tIle
3仿真结果分析 下面用仿真对上一节设计的UKF进行验证。 仿真条件如下·陀螺常值漂移:气=%=%=0.01(。)/}l;陀螺随机漂移:三个陀螺均取盯,20.001(。)/Il、相关时
基于仿射模型变换的地磁匹配导航算法_罗诗途
第18卷第4期中国惯性技术学报Vol.18 No.4 2010年8月 Journal of Chinese Inertial Technology Aug. 2010文章编号:1005-6734(2010)04-0462-04基于仿射模型变换的地磁匹配导航算法罗诗途,任治新(国防科学技术大学机电工程与自动化学院,长沙 410073)摘要:为了提高潜航器上地磁匹配的效率和精度,通过对潜航器惯导系统误差模型的分析,提出了一种基于仿射模型变换的粗精两级地磁匹配定位方法。
首先,利用基于等值线约束的相关匹配算法消除导航系统的初始位置误差;其次,采用仿射模型对相关匹配结果的轨迹进行旋转、缩放变换,通过参数扫描实现精匹配的过程。
该算法在保证实时性的同时,匹配精度优于1个网格点。
关 键 词:潜航器;惯性导航;误差模型;仿射模型;地磁匹配中图分类号:U666.1 文献标志码:AGeomagnetic matching algorithms based on affine modelLUO Shi-tu, REN Zhi-xin(College of Mechatronics Engineering and Automation, National University of Defense Technology, Changsha 410073, China)Abstract: To improve the efficiency and precision of undersea vehicles, a two-level geomagnetic matching (roughand fine) algorithm using affine model transposition is put forward based on the analysis of the INS (inertialnavigation system) error models of underwater vehicle. First, it uses the correlation matching method, which is basedon contour constraint, to eliminate the initial position error of INS. Then, it uses an affine model to circumgyrate andzoom the tracks obtained from correlation matching results. Finally, through scanning correlation parameters, theaccurate matching process is realized. Experiments show that the algorithm not only meets the real time requirement,but also has the matching precision of better than one grid.Key words: underwater vehicle; inertial navigation; error model; affine model; geomagnetic matching地球物理场(Geophysical Fields of the Earth,GFE)辅助的惯性导航系统是一种有着广泛发展前景的组合导航系统,是自主导航技术研究的新方向。
地磁匹配导航算法及地磁场模拟系统研究论文论文

Classified Index: V448. 2Dissertation for the Master Degree in Engineering RESEARCH ON THE GEOMAGNETIC NAVIGATION MATCHING ALGORITHM AND THE GEOMAGNETIC FIELD SIMULATION SYSTEMCandidate:Supervisor:Academic Degree Applied for: Specialty:Affiliation:Date of Defence:Degree-Conferring-Institution: Liu YayunProf. Wang ChanghongMaster of EngineeringControl Science and Engineering Dept. of Control Science and Engineering June, 2011Harbin Institute of Technology摘要摘要地磁辅助导航系统是一种自主导航方法,隐蔽性强,不受地形和恶劣天气的影响,具有全天时、全天候和全地域的特点,作为一种新的导航方法,地磁辅助导航在航空、航天和航海等领域将发挥越来越重要的作用。
因此开展地磁辅助导航理论研究,建立用于地磁导航系统评估和验证的地磁场模拟系统,具有重要的理论和实际意义。
地磁匹配算法作为地磁辅助导航系统的核心技术之一,它的优劣将直接影响整个系统的导航精度和匹配效率。
本论文首先针对常见的地磁匹配算法MAGCOM 算法和ICCP 算法进行了研究,并对这两种算法的匹配效果进行了仿真,结果表明MAGCOM 算法简单,运算速度快,但是精度比较低,不能校正航向误差;ICCP 算法可以对航向误差进行校正,并且精度比较高,但是初始误差不能过大,否则容易匹配失败,并且容易陷入局部最优。
其次,针对上述算法的不足,提出了将遗传模拟退火混合算法和ICCP 算法相结合的新的匹配方法。
基于改进Cao算法的奇异谱分析法及其在北斗多路径去噪中的应用

基于改进Cao算法的奇异谱分析法及其在北斗多路径去噪中的应用余斌;杨少敏【摘要】研究了基于奇异谱分析的北斗恒星日滤波算法,采用相空间重构Cao算法来确定奇异谱嵌入维度,并针对Cao算法的不足进行改进,提高奇异谱分析法的准确性和计算效率.分析北斗系统不同星座卫星的轨道重复周期特性,通过计算确定北斗系统多路径误差的周期约为86 160 s.利用奇异谱分析法和传统小波分析法对北斗短基线解算结果进行恒星日滤波处理.结果表明,本文提出的奇异谱分析法多路径滤波效果优于小波滤波法,能较好地消除原始坐标序列中的多路径误差.【期刊名称】《大地测量与地球动力学》【年(卷),期】2019(039)001【总页数】6页(P25-30)【关键词】奇异谱分析;改进Cao算法;重复周期;恒星日滤波【作者】余斌;杨少敏【作者单位】中国地震局地震研究所地震大地测量重点实验室,武汉市洪山侧路40号,430071;中国地震局地壳应力研究所武汉科技创新基地,武汉市洪山侧路40号,430071;中国地震局地震研究所地震大地测量重点实验室,武汉市洪山侧路40号,430071;中国地震局地壳应力研究所武汉科技创新基地,武汉市洪山侧路40号,430071【正文语种】中文【中图分类】P228北斗卫星导航系统(Beidou navigation satellite system,BDS)是中国自行研制的全球卫星导航系统。
截至2018-01,北斗系统已发射27颗卫星,其中15颗在轨稳定运行。
当前北斗系统的服务范围已覆盖亚太地区,能够为亚太地区用户提供稳定可靠的PNT服务。
随着北斗系统星座的不断完善,其在动态变形监测中的应用越来越广泛。
在实际GNSS变形监测中,所布设的基线一般较短,利用差分技术可以大幅削减有较强空间相关性的接收机钟差、卫星钟差、对流层延迟和电离层延迟等误差。
但基线两端的多路径效应与站点环境有关,不具有空间相关性,利用差分技术无法消除其影响。
基于ICCP算法的地磁匹配定位方法
基于ICCP算法的地磁匹配定位方法李豫泽;石志勇;杨云涛;冯俊【摘要】基于ICCP算法的地磁匹配定位可以用于限制惯导系统随时间增长的位置误差.给出ICCP算法的设计思想并进行推广,使算法能够在地磁测量数据存在误差的情况下,实现对惯导的误差校正.同时采用滑动窗口技术来快速寻找等值线上的最近点,在每一次收敛到局部最小的过程中都减少了寻找最近点的计算量,计算效率得以很大程度的提高.【期刊名称】《现代电子技术》【年(卷),期】2008(031)020【总页数】4页(P122-124,127)【关键词】ICCP算法;自主无源导航;地磁匹配;误差校正【作者】李豫泽;石志勇;杨云涛;冯俊【作者单位】军械工程学院,河北,石家庄,050003;军械工程学院,河北,石家庄,050003;军械工程学院,河北,石家庄,050003;军械士官学校,湖北,武汉,430075【正文语种】中文【中图分类】TJ765;TN9661 引言实时确定载体的位置和速度,是提高武器装备独立作战能力和整体作战能力的重要手段,也是提高制导武器性能的基本要求。
目前,导航定位的主要方式包括惯性导航和卫星导航等。
惯性导航,不借助任何外来信息,也不向外辐射任何信息,能够在全天候条件下,在全球范围内和任何介质环境里自主地、隐蔽地进行连续的三维空间定位和三维空间定向,能够提供完整的导航参数,但是它的缺点是导航误差随时间积累,长时间使用必须校正。
虽可采用GPS、无线电和天文导航等信息对惯性导航系统进行校正,但这些方法增加了载体被发现的危险性。
随着无源导航技术的发展,地磁导航技术的出现为实现这一目标提供了新的技术途径。
由于地磁场在全球范围内各点值都不相同,理论上与经纬度是一一对应的,同时某些地区磁场特征也很明显,因此地磁导航成目前研究的一个热点。
地磁导航技术在获取地磁信息时对外无能量辐射,具有良好的隐蔽性,因此可以实现载体长期高精度定位。
地磁导航就是利用地磁图特征与当地即时测量磁特征信息进行匹配导航的过程。
基于奇异指数的地磁辅助导航路径规划算法
2. 0
15 .
1O . 0. 5 ×l 0 0 0 5 10 15 2 0 2 5 3 0 3 5 4. . . . . . . . . . 0 4 5 5 0 7 m
l rt x o e twa e o me s e t e a u to e ma n t n o ai n,t e fr a c nd x wa u l usng a i e p n n sus d t a ur h mo n fg o g e i if r to y c m he p ro m n e i e sb it i g o s i fr to n n r a i g f co s n ih o t l n i g f rg o g e i i e a ia in wa e e r h d r s n o ma in a d i c e sn a t r ,a d f g tr u e p a n n o e ma n tc ad d n v g t sr s a c e l o u i g a sn u a t x o e t sn i g lr y e p n n .Fi al i n ly,p ro ma c s c mp rd u i g t ihtsmulto l n fe e t r ue e fr n e wa o a e sn he f g i l ain ao g di r n o ts f
基 于奇 异 指 数 的地 磁 辅助 导 航 路径 规 划算 法
李欣 , 王德 生 , 立国 , 孙 李世 丹
地磁匹配导航算法及延拓研究
地磁匹配导航算法及延拓研究【关键词】地磁匹配;二维算法;三维拓展;地磁测量0 引言地磁匹配导航技术作为一种无源惯导辅助导航方式,具有全天时、全天候、全地域、低能耗的特点,是一个非常重要的研究方向[1];其中最核心的研究问题是地磁匹配导航的算法问题,近年来研究较多的是二维算法,已经有很多仿真结果表明其可以用于实际应用[2]。
但是在地磁匹配中,不同类型的飞行器在不同的区域不同的航迹规划条件下其飞行高度是不同的,如何将在特定高度制成的基准图有效地应用于飞行器地磁匹配是一个具有重要价值的研究问题。
这就需要进行算法的三维严拓研究及其数据验证,而此方面的研究则进展缓慢,本文针对二维算法及三维延拓进行研究探讨。
1 地磁匹配导航原理地磁导航系统主要由地磁数据库、地磁传感器和地磁匹配算法等组成。
当飞行器在地表飞行时,地磁场强度的变化主要体现为异常场强度的变化,由于地磁异常场非常稳定,基本不随时间变化,所以一般采用表示地磁异常场特征的地磁异常图作为地磁导航数据库。
磁场强度总量由磁传感器获得,包括地磁场和环境干扰磁场,通过误差补偿、提高传感器精度等手段测得地磁数据后,经过日变校正等处理,得到最终的地磁场的测量值。
使用地磁匹配算法对惯导误差进行纠正,使得导航系统向正确航迹靠拢,沿规划航迹飞行。
1.1 地磁场地球本身就是一个天然的巨大磁体,经纬度所对应的磁场值是唯一的,地磁场是一个矢量场,磁场强度大小和方向都随着空间和时间的变化而变化,因此它可以用地理位置和时间来表示。
地球表面的地磁场b (r ,t)表示如下:1.2 导航基本原理地磁匹配是一种无源自主式导航方法,通过实时采集一维地磁场数据来获得二维定位。
首先将飞行器所经过的特定区域网格化,取每个网格点值构成地磁基准图。
当飞行器进入该区域时,地磁传感器实时采集一维磁场数据,形成一个实测磁场值序列,将地磁基准图与该序列进行匹配计算,寻找正确的位置,将此值用来修正惯性导航的位置信息,以便完成对飞行器航线误差的纠正。
一种基于多尺度估计的地磁辅助导航算法[发明专利]
[19]中华人民共和国国家知识产权局[12]发明专利申请公布说明书[11]公开号CN 101354252A [43]公开日2009年1月28日[21]申请号200810119963.8[22]申请日2008.09.19[21]申请号200810119963.8[71]申请人北京航空航天大学地址100083北京市海淀区学院路37号[72]发明人房建成 冯浩楠 韩晓英 黄学功 [74]专利代理机构北京科迪生专利代理有限责任公司代理人贾玉忠 卢纪[51]Int.CI.G01C 21/08 (2006.01)G01C 21/20 (2006.01)权利要求书 1 页 说明书 7 页 附图 2 页[54]发明名称一种基于多尺度估计的地磁辅助导航算法[57]摘要一种基于多尺度估计的地磁辅助导航算法,该方法在对实测地磁信号和地磁图数据进行多尺度分解的基础上,在不同尺度上对二者分解的近似信息和细节信息分别进行相关运算,最后对各个尺度匹配经纬度综合求取最终经纬度。
该方法充分利用了地磁场信息多尺度的特征,剔出了噪声部分,减少了载体存储空间,实现了多分辨率定位,提高了定位的精度,为载体的高精度进行地磁辅助导航定位提供了基础。
200810119963.8权 利 要 求 书第1/1页 1、一种基于多尺度估计的地磁辅助导航算法,其特征在于包括以下步骤:(1)将地磁图多尺度分解成近似信息和细节信息进行存储;(2)将实测地磁信号多尺度分解成近似信息和细节信息;(3)在各种尺度下,对地磁信号和地磁图分解的近似信息和细节信息分别进行相关运算,计算出匹配经纬度;(4)对各个尺度匹配经纬度综合求取最终经纬度。
2、根据权利要求1所述的基于多尺度估计的地磁辅助导航算法,其特征在于:所述步骤(1)和(2)中的多尺度分解使用Daubechies小波采用Mallat算法对信号在三个或者四个尺度上进行分解。
3、根据权利要求1所述的基于多尺度估计的地磁辅助导航算法,其特征在于:所述步骤(3)中的相关算法为MAD运算;4、根据权利要求1所述的基于多尺度估计的地磁辅助导航算法,其特征在于:所述步骤(4)中的求取方法是对各个尺度匹配经纬度乘以分解时对应的尺度系数2s再进行平均得到,s为分解的尺度数。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
a
singularity
exponent.Finally,performance
as
was
compared using the flight simulation along different mutes
particle filter
the geomagnetic filter algorithm.The simulation results show that aided navigation routing
体的姿态参数相关,精度都难以保证,因而只能选择
地磁场总强度特征量的观测信息.显然,用一维的地 磁场特征对二维的坐标点进行定位,同地形导航、图 像匹配技术一样存在着信息量有限、系统不完全可
收稿日期:2009-07-07. 作者简介:李欣(1967一),女,博士研究生,E—mail:lixinnavy96@sina.
Jh.标度因数5×10;加速度计.偏移
万方数据
・512・
哈尔滨工程大学学报
application of the
contour
第32卷
in geomagnetic navigation system
精度小于50 1"11,对修正惯导系统误差、提高导航精
度贡献最大;路径2是按照总信息量最大、但是信息
量的变化趋势是从大到小的方法选择的,滤波器迅 速收敛后,又随着信息量的逐渐消失而趋向发散;路
[5,9]指出,地磁滤波对初始误差要求较高;飞行轨 迹对应的地磁场变化愈大,滤波修正导航偏差愈有
万方数据
喻尔滨工程大学学报
效由于地磁导航技术起步段晚.关于地磁辅助导航
ห้องสมุดไป่ตู้
标,图像亮度变化越剧烈的地方蕴含的信息世越大
x【04
的航迹规划算法研究也多应用地形辅助导航的成熟
技术 本文在上述研究的基础上,对应用地磁异常场 奇异指数规划地磁辅助导航路径的准则和算法进行 r研究 l
corn;
性组合导航方案”1无需存储大量的地磁数据,但需
要载体在较长一段时间内连续递推滤波导航定位.
目前具代表性的地磁滤波算法主要是扩展卡尔曼滤
波(extended
Kalman
filter,EKF)∞习1和采样卡尔曼
Kalman
滤波方法(unscented
filter,UKF)¨五聃J.文献
王德生(1948一),男,教授,博士生导师. 通信作者:李欣.
(清华大学电子工程系,北京100084) 摘要:针对地磁场测量信息观测性较差的现状,为了获得较高的辅助导航定位精度和良好的滤波性能,进行了地磁辅 助导航路径规划研究.以反映地磁场变化幅度的奇异指数做为地磁场信息量的度量,以点迹总信息量及信息量递增性构 建辅助导航路径性能指标.采用粒子滤波算法,对不同路径进行了辅助导航性能仿真对比.仿真结果表明,该算法规划的 辅助导航路径比其他路径具有更好的导航定位精度和滤波性能. 关键词:地磁导航;路径规划;多重分形;小波变换;奇异指数 中图分类号:TP391,4文献标识码:A文章编号:1006-7043(2011)04-0509-04
册m
图1地磁异常场灰度圉
Fig.1 Sketch map of
g—gnefic
fldd
的定位精度如第l青中所述.辅助导航区域应该选 择信息量丰富的区域提高可观测性.区域的大小应 当保证地磁滤波长度内的惯导指示轨迹和真实轨迹
2地磁异常场的奇异指数计算
把地磁异常场强度看做二维灰度图像,每个测 点都是灰度图上的一个像索,灰度值表示测点的异 常场强度,根据多重分形理论,这样的灰度图像是具 有多重分形性质的”… 由于小波变换具有多尺度分析的聚焦特性,可 用在多重分形度量中分析奇异指数的空间分布”。
第32卷第4期 2011年4月
哈尔滨工程大学学报
Journal of Harbin Engineering University
V01.32№.4
Apr.201l
doi:10.3969/j.issn.1006—7043.201
1.04.020
基于奇异指数的地磁辅助导航路径规划算法
李欣,王德生,孙立国,李世丹
information,the performance
index was built using
gross information and increasing factors,and flight route planning for geomagnetic aided navigation was researched using with
Abstract:Geomagnetic navigation precisely obtains positions from geomagnetic field information.In order to obtain precise positions and filter stability,the poor observability of measured geomagnetic data was analyzed,the singu— larity exponent was used to measure the amount of geomagnetic
500 600 2.
Fig 5
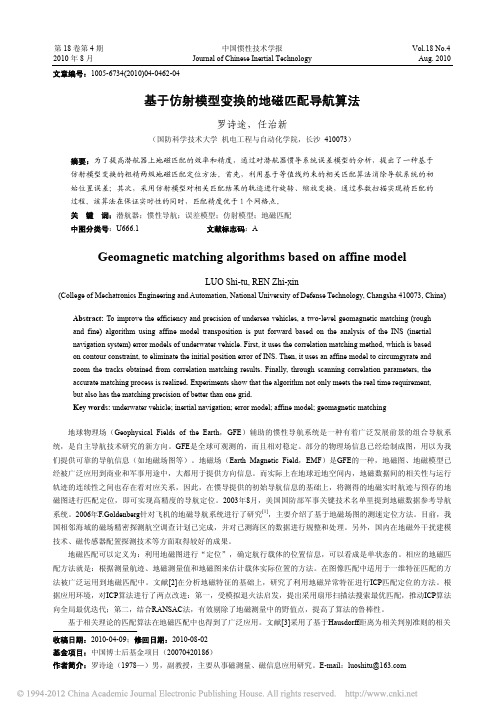
(一规划路径3 囤5不同规划路径定位误差
粒子数100 000个仿真r}i假设b行器已经航行了 s,此时惯导误差约为900 m仿真中使用的 惯导误差参数:陀螺仪.偏移o 001。/h,背离白噪声 标准0
01
P∞ition—r ofdiffemntmutings
路径1是按照本文中路径规划准则构建的优化 航路,从信息量由小到大的区域穿越路径.随着信息 付的逐渐丰富,滤波器渐进收敛.滤波结束时,收敛
[J].Journal
604-607.
of Chinese Inertial
Technology,2008,16(5):
[5]郭才发,胡正东,+张士峰,等.地磁导航综述[J].宇航 学报,2009,30(4):1314—1319.
GUO Caifa,HU Zhengdong,ZHANG Shifeng,et a1.A vey of
50¨g,背离白噪声标准8 p-g,标度因数5×10-6,
4
2仿真验证 图5为3条路径的水平定位误差结果路径l
和路径3的滤渡在100 s内收敛.路径1的定位精度 蛀高,路径2的滤波发散
进行加权构建路径规划|生能指标
辅助导航路径规划算法的步骤: 1)根据对地磁滤波长度的限定和惯导最大漂 移误差确定辅助导航区域的大小; 2)在飞行航医范围内,搜索特征值满足导航精 度要求的导航特征区; 3)根据特征区距发射点或前次惯导修正点的 距离估算惯导最大漂移误差,综合考虑特征区距弹 目连线的垂直距离,选择预定辅助导航区域; 4)沿飞行方向搜索预定辅助导航区域内性能 指标最优的辅助导航路径
4仿真
4
a)规划路径
1仿真设计 誓虑3条小同的笆行路径如图4
。i0‘
如¨枷"如∞加¨∽¨
0 0 5 0 i 5 2 0 2 5 3 0 3 5 4 0 4 5 5 0 y/m
b)规iⅡ路径2
图4飞行路径示意
Fig.4 Sketch map of flight routings
路径1:航路点数:43,E行速度:马赫数0 9;起 点(3
sur-
径3从信息量均匀分布但不丰富的区域穿过,滤波
器精度不高,但能稳定收敛,可以用来修正惯导误 差,对导航精度能有所提高. 5
geomagnetic navigation[J].Journal of Astronautics,
2009,30(4):1314-1319. [6]晏登洋,任建新,宋永军.惯性/地磁组合导航技术研究 [J].机械与电子,2007,25(1):19-22.
地磁场是地球的固有资源,地球近地空间内任 意一点的磁场矢量都不同于其他地点,只要精确测
观的问题,因此,必须合理规划飞行航迹,获得信息 量丰富的观测信息,才能保证地磁导航精度旧J.关 于地形辅助导航的航迹规划算法研究较为成熟,文 献[3]利用多重分形理论计算衡量地形信息量的奇 异指数,选择地形信息量大的地形作为适飞区,采用 粒子滤波(particle filter,PF)仿真验证了算法对提高 导航精度的有效性. 目前,基于等磁线的航迹规划技术已成功应用 于俄罗斯的新型机动变轨的SS一19导弹的制导系 统,突破了美国的反弹道导弹拦截系统H1.地磁/惯
都在此范围内o“另外,还要考虑最小航程的约束
确定辅助导航区域 根据最优估计理论,滤渡初始误差、测吐信息的 可观测性和模型的精确性影响着滤波的收敛速度、 收敛精度和稳定陀”3对地磁滤波来说.滤波初始
误差由惯导漂移误差决定.通常较大;当辅助导航路
径上的信息量较小(奇异指数和较大)时,滤波器没 有足够的观测信息对惯导系统的误差进行修正,滤 波器收敛速度慢,严重时髓惯导误差发散;当导航路 径上的地磁场强度信息量很丰富,滤波器快速收敛 如果随后路径上的地磁场强度信息鳋变小,滤渡器
定该点的地磁场矢量即可实现导航定1立【1;.地磁辅
助导航的原理就是利用地磁特征传感器实时测得地 磁数据,与存储在计算机中的地磁特征基准数据比 较,确定载体真实位置,并利用该信息对惯导系统校 正,提高导航精度.由此可见,地磁场特征与导航精 度密切相关.目前,在地磁场7个特征量中,总磁场 强度分量的测量精度最高,而其他的分量由于与载
Flight route planning for geomagnetic aided navigation
● o l -・
using
a
singtflarity exponent
LI Xin,WANG Desheng,SUN Liguo,LI Shidan
(Department of Electronic Engineering,Tsinghua University,Beijing 100084,China)