自动控制原理2008年[1]
高国燊《自动控制原理》(第4版)名校考研真题(第1~4章)【圣才出品】

高国燊《自动控制原理》(第4版)名校考研真题第1章绪论一、选择题1.线性系统的主要特点有()。
[华中科技大学2009年研]A.稳定性B.振荡性C.收敛性D.齐次性【答案】D2.对控制作用进行适当的补偿(复合控制),可使系统()。
[湖南大学2006年研] A.由不稳定变成稳定B.减小非线性的影响;C.提高无差度D.同时改善快速性和抗干扰能力【答案】D3.在通常的闭环控制系统结构中,系统的控制器和控制对象共同构成了()。
[杭州电子科技大学2008年研]A.开环传递函数B.反馈通道C.前向通道D.闭环传递函数【答案】C二、填空题1.自动控制系统按给定信号的类型可分为______系统和______系统。
[燕山大学研]【答案】连续系统;离散系统2.自动控制系统性能好坏的三个方面为:______。
[燕山大学研]【答案】稳定性,快速性,准确性。
3.自动控制系统对输入信号的响应,一般都包含两个分量,即一个是______,另一个是______分量。
[华南理工大学2006年研]【答案】稳态;瞬态4.最常用的补偿方法是______和______。
[湖南大学2006年研]【答案】按扰动补偿;按输入补偿三、问答题1.何谓自动控制?开环控制和闭环控制各具有什么样的特点?[华南理工大学研]答:(1)自动控制:在无人直接参与下,利用控制装置操纵被控对象,使被控量等于给定量。
(2)开环控制特点:开环控制是按给定值控制,控制方式比较简单,但控制精度受到原理上的限制。
(3)闭环控制特点:闭环控制为偏差控制,可以使反馈回路中的干扰信号得到抑制,因而控制精度较高,但闭环控制有可能使系统不稳定。
2.在经典控制理论中,负反馈控制是一种最基本的控制方式,也是一种常用的校正方式,试举例论述采用负反馈控制的优点。
[南开大学研]答:负反馈的特点可以从“负”字上得到很好的理解,它主要是通过输入、输出之间的差值作用于控制系统的其他部分。
这个差值就反映了我们要求的输出和实际的输出之间的差别。
东北大学自动控制原理考研真题(二)2008-2015
2������
+
2)
试画出根轨迹草图,并用根轨迹法确定使闭环主导极点的阻尼比
ξ = 时0.���5���������值。
五、(20 分)已知系统的开环传递函数为:
������������ (s) = ������(0.25������
6 + 1)(0.06������
+
1)
试绘制伯德图,求相位裕度及增益裕度,并判断闭环系统的稳定性。
图 3 所示,求微分时间常数τ。
Xr(s)
-
Kk s(s+1)
Xc(s)
图 2. 题三原系统结构图
Xr(s)
-
E(s)
-
4 s(s+1)
τs
Xc(s)
图 3. 题三改善后系统结构图
四、(20 分)已知单位负反馈系统的开环传递函数为:
������������ (s) = (������
+
������������ 16)2(+������
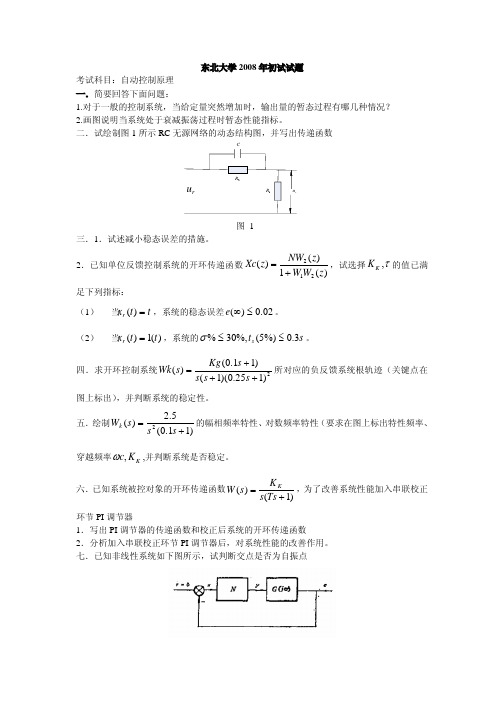
东北大学 2008 年初试试题 考试科目:自动控制原理 一.简要回答下面问题: 1.对于一般的控制系统,当给定量突然增加时,输出量的暂态过程有哪几种情况? 2.画图说明当系统处于衰减振荡过程时暂态性能指标。 二.试绘制图 1 所示 RC 无源网络的动态结构图,并写出传递函数
C
R2
ur
R1
uc
三.1.试述减小稳态误差的措施。
六、(20 分)试写出串联引前(微分)校正装置的传递函数,并说明
其作用和适用范围。
七、(20 分)
(1)试说明用描述函数法分析非线性系统的基本思想:
(2)设继电气特性为:
y(x) =
08自动控制[1]
![08自动控制[1]](https://img.taocdn.com/s3/m/36a851eef8c75fbfc77db2b1.png)
(b)
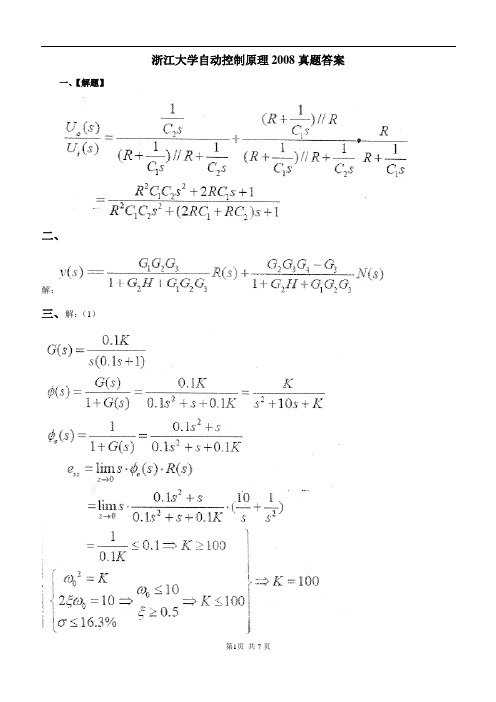
四,稳定性分析(30 分) : 1, (本小题 16 分)已知单位反馈控制系统的开环传递函数为 G( s) = 100(τs + 1) s2
试绘制系统的开环极坐标特性曲线,并确定使相角裕度等于 45°的τ值. 2, (本小题 14 分)某随动系统如图 3 所示. 当调节放大系数 K(K>0)至某一数值 时,系统产生频率为ω= 5 (1/s) 的等幅 振荡.试确定系统参量 K 和 a 的值. 五,根轨迹分析(本题 18 分) : 设控制系统的结构图如图 4 所示 . (1)绘制 Kg=0→+∞时系统的 根轨迹(求出分离点以及与 虚轴交点) ; (2)根据根轨迹确定系统稳) -
Gc (s )
G0 ( s )
C(s)
图5 图6
七, (本题 16)已知描述系统运动的微分方程为
& & & x+x+ x =0
(1)绘出系统相平面图的大致图形,并判断奇点的类型; (2)定性分析系统的运动规律. 八, (本题 17 分)已知某离散系统的结构图如图 7 所示,T=1s,试求: (1)当 r (t ) = 1(t ) 时系统的输出 c * ( t ) ; (要求:最少保留 5 个采样周期) (2)当 r ( t ) = t 1( t ) 时系统的稳态误差 e(∞ ) .
共 3 页,第 2 页
R(s)
E(s) -
K ( s + 1) s + as 2 + 2s + 1
3
C(s)
图3
R(s) -
Kg
s 2 2s + 5 ( s + 2)( s 0.5)
C(s)
图4
六, (18 分)某最小相位系统如图 5 所示,其中系统固有部分 G0 (s ) 和校正装置 Gc (s ) 的对数幅频特性曲线分别如图 6 中的 L0 (ω ) 和 Lc (ω ) 所示.
浙江大学自动控制原理2008真题答案
浙江大学自动控制原理2008真题答案
一、【解题】
二、
解:
三、解:(1)
(2)
(3)
{
四、
五、
解:(1)等效开环传递函数
开环极点:P1=0,P2,3=-0.5
渐近线与实轴交点
根轨迹与虚轴的交点:s=-jw代入
六、
截止频率wc=5
系统的相角稳定裕量
七、解:
八、解:
做w变换并整理,得
欲使系统稳定,必须满足:0<K<5.79
(2) 系统的开环脉冲传递函数为
画出根轨迹草图,可知,当z=-1是系统稳定与否的临界点,由此可得去掉零阶保持器后使系统稳定的K的取值范围是0<K<5.27。
根轨迹如下
九.解:(1)系统的状态方程:
输出方程:y=-x1+ui
(2)传递函数为
十.解:(1)先判别能控性,再分别求出系统开环传递函数、期望的闭环传递函数,求出能控标准型下的状态反馈阵后,再求出原来系统基底下的反馈阵K。
能控标准型基底下的反馈阵
十一、解:
当A由零到无穷大时,
线性部分的频率特性为:
在复平面绘出个G(jw)曲线以及-1/N(A)曲线,如图所示
(2)综上可得,系统自振频率为1.152,幅值为5.83。
西安交通大学《自动控制原理与信号处理》真题2008年
西安交通大学《自动控制原理与信号处理》真题2008年(总分:100.00,做题时间:90分钟)一、{{B}}{{/B}}(总题数:1,分数:20.00)已知某系统方框图如附图1所示。
图1(分数:20.00)(1).画出该方框图所对应的信号流图;(分数:10.00)__________________________________________________________________________________________正确答案:(信号流图如附图2所示。
[*]图2)解析:(2).试用梅森增益公式确定该系统的传递函数。
(分数:10.00)__________________________________________________________________________________________正确答案:(根据梅森公式:回路:L1=-G1G2H1,L2=-G2G3H2,L3=-G1G2G3,L4=-G1G4,L5=G1G2G4H1H2Δ=1+G1G2H1+G2G3H2+G1G2G3+G1G4-G1G4H2G2H1。
前向通道:p1=G1G2G3,p2=G1G4,因为没有相互独立的回路,所以Δ1=Δ4=1则可得传递函数为:G(s)=[*])解析:二、{{B}}{{/B}}(总题数:1,分数:20.00)已知某运算放大器的输出分别反馈到放大器的正输入端和负输入端,如附图所示。
其中,N=为负反馈率,P=为正反馈率。
如果图中的运算放大器为非理想运放,实际模型可用如下两个表达式来描述:i+=i-=0,Vout=(V+-V-)。
(分数:20.00)(1).试求该电路的传递函数;(分数:10.00)__________________________________________________________________________________________ 正确答案:(因为i-=0,所以:[*]同理,因为i+=0,所以:[*]由式①,得:V-=(1-N)[*]由式②,得:V+=[*]将V out=[*](V+-V-)代入式③和式④,可得:[*])解析:(2).试问在什么条件下,能使电路保持稳定。
自动控制原理实验指导书(11.09版)
河南机电高等专科学校《自动控制原理》实验指导书专业:电气自动化技术、计算机控制技术生产过程自动化技术等吴君晓编2008年9月目录实验一 (2)实验二 (4)实验三 (6)实验四 (8)实验五 (10)实验六 (12)实验七 (14)实验八 (15)实验九 (17)实验一建立MATLAB环境下控制系统数学模型一. 实验目的1.熟悉MATLAB实验环境,掌握MATLAB命令窗口的基本操作。
2.掌握MATLAB建立控制系统数学模型的命令及模型相互转换的方法。
3.掌握使用MATLAB命令化简模型基本连接的方法。
二、实验设备和仪器1.计算机2. MATLAB软件三、实验原理控制系统常用的数学模型有四种:传递函数模型(tf对象)、零极点增益模型(zpk对象)、结构框图模型和状态空间模型(ss对象)。
经典控制理论中数学模型一般使用前三种模型,状态空间模型属于现代控制理论范畴。
1.传递函数模型(也称为多项式模型)连续系统的传递函数模型为:在MATLAB中用分子、分母多项式系数按s的降幂次序构成两个向量:num = [ b0 , b1 ,…, bm ] ,den = [ a0 , a1 ,…, an]。
用函数tf ( )来建立控制系统的传递函数模型,其命令调用格式为:G = tf ( num , den )注意:对于已知的多项式模型传递函数,其分子、分母多项式系数两个向量可分别用G.num{1}与G.den{1}命令求出。
2.零极点增益模型零极点模型是是分别对原传递函数的分子、分母进行因式分解,以获得系统的零点和极点的表示形式。
式中,K为系统增益,z1,z2,…,z m为系统零点,p1,p2,…,p n为系统极点。
在MATLAB 中,用向量z,p,k构成矢量组[ z, p, k ]表示系统。
即z = [ z1, z2 ,…,z m ],p = [ p1, p2,…, p n ],k = [ k ],用函数命令zpk ( )来建立系统的零极点增益模型,其函数调用格式为:G = zpk ( z, p, k )3.控制系统模型间的相互转换零极点模型转换为多项式模型: G=zpk(G)多项式模型转化为零极点模型: G=tf(G)4.系统反馈连接之后的等效传递函数两个环节反馈连接后,其等效传递函数可用feedback ( )函数求得。
自动控制原理课件第一章 胡寿松
4
1.1.3 反馈控制原理 自动控制系统: 为实现各种控制任务, 自动控制系统: 为实现各种控制任务,将被控对象和控制装置按 照一定的方式连接起来的一个有机总体. 照一定的方式连接起来的一个有机总体. 反馈控制: 反馈控制: 在自动控制系统中将被控量以负反馈的形式与输入量 进行比较,并利用偏差来不断消除偏差的控制过程. 进行比较,并利用偏差来不断消除偏差的控制过程. 人本身就是一个具有高度复杂控制能力的反馈控制系统
+
电动机
RW
-
Up
>
K2 SD
i
M
fz
Ua D 减速器 CF n
K1
调速系统( 调速系统(闭环)
∆U
UCF Ur
E
Ur + UCF -
∆U
> K1
USD
SD
Up CF
> K2
Ua
D
n
调速系统( 图1-6 调速系统(闭环)及其职能方块图
11
闭环系统的特点: 闭环系统的特点: 利用偏差消除偏差; ① 利用偏差消除偏差; 能抑制内部或外部扰动对系统的影响, ② 能抑制内部或外部扰动对系统的影响,可用低成本元件构 成高精度系统; 成高精度系统; 稳定性是个重要问题。 ③ 稳定性是个重要问题。 注意: 注意: 在实际系统中,一个元件常兼有两种或两种以上的职能; ① 在实际系统中,一个元件常兼有两种或两种以上的职能; 上述元件不一定都是电气元件,有时可以是机械、气动、 ② 上述元件不一定都是电气元件,有时可以是机械、气动、 液压等元件,从而可以构成机械、气动、液压等控制系统, 液压等元件,从而可以构成机械、气动、液压等控制系统,但其工 作原理都是一致的。 作原理都是一致的。 12
自动控制原理:第1章 自动控制的基本概念 (2)
m
Md ML
J s2 Bs
c
1
i
m
将每个子方程的结构图按照相互关系,正确地连接起来, 得到下图
自动控制原理
27
2.4.3 结构图的等效变换
(1)结构图的基本组成形式 1)串联连接
C(s) G2 (s)U (s) G2 (s)G1(s)R(s)
C(s) R(s)
G1(s)G2 (s)
2)并联连接
在控制系统稳定的前提下,总是希望响应越快越好,而 且超调量越小越好。
自动控制原理
4
1.4 对控制系统的性能要求
1.4.3 稳态误差
控制系统在稳定的情况下,希望的输出与实际的输出之 差称为误差,误差的稳态分量称为稳态误差(或称为静态误 差),一般用ess表示。
自动控制系统的性能指标分别描述了系统在稳定性、动态 性能、稳态性能三个方面的要求,根据这些性能指标,就可以 判别系统性能的优劣。
i
(2-6)
式(2-5)或(2-6)就是描述简单水槽对象特性的数 学模型。它是一个一阶常系数微分方程式。
T为时间常数。 K 为放大系数。
自动控制原理
16
2.3 传递函数
2.3.1 传递函数的概念
RC电路如下:根据克希霍夫定律, 可列写微分方程
Ri(t) uc (t) ur (t)
uc
(t)
1 C
1
uc (t) C idt
(2)消去中间变量i后,得输入输出微分方程式
LC
d
2uc (t) dt 2
RC
duc (t) dt
uc
(t)
ur
(t)
或
T1T2
d
2uc (t) dt 2
自动控制原理第一章第四节
t 1 [t U (t T0 )dt] T0 Ti
t t T0 : c(t ) Ti
T0 t T0 : c(t ) Ti
响应随时间线性增长,当输入突然消失,积分停止,输 出维持不变,故积分环节具有记忆功能。
14
例:用集成运放构成的反相积分器(积分环节)
U 0 ( s) 1 1 传递函数为: G( s ) U i ( s) RCs Ti s
0
t
其传递函数:G ( s ) C ( s ) 1 积分环节的单位阶跃响应为:
Ti s
Ti为积分时间常数
1 C (t ) t Ti
13
积分环节具有记忆功能 (举例说明)
1 c(t ) Ti 1 Ti
t 0
r (t )dt
0 0
t
[U (t ) U (t T )]dt
典型二阶环节的动态方程为:
其传递函数 :
d 2 c( t ) dc( t ) 2 T 2T c( t ) Kr ( t ) 2 dt dt
C ( s) K K /T2 G( s ) 2 2 2 R( s ) T s 2Ts 1 s 2s / T 1 / T 2
U a ( s ) Ea ( s ) Ra ( s ) La s E a ( s ) ce Ω( s ) M D ( s) cM Ia ( s) M D - M L ( s) ( s ) Js Ia ( s)
34
将输入Ua(s)放在左端,输出Ω (s)放在图形右端, 将同一变量的信号线连接起来,得系统方框图如图 所示。
(Ti = RC)
15
4.
微分环节
时间响应分析(9)自动控制原理
2 2 ωn (Td s +1) ωn (Td s +1) G(s) φ(s) = = 2 = 2 2 2 2 1+ G(s) s + 2ξωns +ωnTd s +ωn s + 2ξdωns +ωn
PD校正改变了原系统的阻尼比,也改变了调 节时间等参数。等效阻尼比增大为: 1 ξd = ξ + Td ωn 2
Y ( s) K ( s + z ) ( s + z2 )⋯(s + zm ) 1 = R( s) (s + p ) ( s + p2 )⋯( s + pn ) 1
n a0 a i y ( s) = +∑ s i= s + p 1 i
若Zj和Pi靠得很近, 则ai很小, 彼此可以对消。
基本结论 1、 闭环主导极点:如果在所有的闭环极点 中,距离虚轴最近的极点周围没有闭环零 点,而其它极点又远离虚轴,那么距虚轴 最近的极点所对应的响应分量,无论从指 数还是系数来看,它们都在时间响应中起 主导作用。 2、 偶极子:若闭环零、极点彼此接近,则 它们对系统响应速度的影响互相抵消。
ξd > ξ 增大了系统的阻尼比,可以使系统动态过程的超 ,
调量下降,调节时间缩短,但由于速度误差系数 k 保持不变 (下一节详细讲授) ,它的引入并不影响系统的稳态精度, 同时也不改变系统的无阻尼振荡频率 ωn 。 此外,比例微分校正为系统增加了一个闭环零点 s=-1/Td, 动态性能指标的公式不再适用(参见教材图5.13)。 由于稳态误差与速度误差系数成反比,因此,适当选择速 度误差系数和微分器的时间常数 Td , 既可减小稳态误差,又 可获得良好的动态性能。