渐开线方程
proe 齿轮渐开线方程
第一组关系式 sd17=df/2
sd16=db/2 sd15=d/2 sd12=da/2 sd18=b sd11=delta sd10=90
第二组关系式 sd0=d/cos(delta) sd1=da/cos(delta) sd2=db/cos(delta) sd3=df/cos(delta)
第三组关系式 sd0=(d-2*b*sin(delta))/cos(delta) sd1=(da-2*ba*sin(delta_a))/cos(delta) sd2=(db-2*bb*sin(delta_b))/cos(delta) sd3=(df-2*bf*sin(delta_f))/cos(delta)
斜齿齿轮齿廓渐开线生成方程为笛卡儿坐标系输入参数方 程,根据 t (将从0变到1) 对 x, y 和 z 例如:对在 x-y 平面的一个圆,中心在原点 , 半径 = 4,参数方程将是:
x = 4*cos(t*360) y = 4*sin(t* 360) z=0 delta=atan(z/z_asm) d=m*z db=d*cos(alpha) da=d+2*ha*cos(delta) df=d-2*hf*cos(delta) hb=(d-db)/(2*cos(delta)) rx=d/(2*sin(delta)) theta_a=atan(ha/rx) theta_b=atan(hb/rx) delta_a=delta+theta_a delta_b=delta-theta_b delta_f=delta-theta_f ba=b/cos(theta_a) bb=b/cos(theta_b) bf=b/cos(theta_f) d1=d/(2*tan(delta))
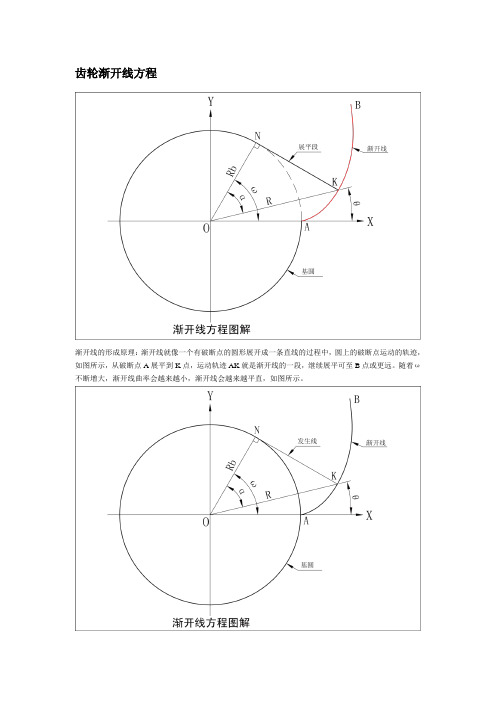
齿轮渐开线方程图解
建立方法同大端,但球面半径rx变为rx-bc
大端齿根圆:
以默认的笛卡尔坐标为基准,用从方程功能建立基准曲线,方程关系式如下:
x=bb1*cos(t*360)
y=bb1*sin(t*360)
z=ob1
小端齿根圆:
建立方法同大端,但半径bb1变为b2b3,x方向尺寸ob1变为ob3。
齿根过度曲线:
3.齿顶圆压力角为参数控制的“极坐标”表示的渐开线方程B:
FAI=T*TAN(ACOS(DB/DW))*180/PI
Rb=DB/2
R=Rb/COS(ATAN(FAI*PI/180))
THETA=FAI-ATAN(FAI*PI/180)
Z=0
B.设ω为滚角参数,设定一个参数值,如45°,将ω用个人习惯的字母符号代替,如FAI。根据“勾股定理”,极轴R的长度R=( Rb^2+NK^2)^0.5。因式中NK=Rb*FAI*PI/180,将其代入。即可写成:
Z=0
滚角为参数“笛卡尔”坐标表示的渐开线:
A=T*45
X=DB/2*COS(A)+DB/2*SIN(A)*A*PI/180
Y=DB/2*SIN(A)-DB/2*COS(A)*A*PI/180
Z=0
所以创建齿轮模型时,如果对渐开线方程不熟悉,尽可能采用“极坐标”方程表达式:式1。
控制渐开线长度的方法:
C.在所有的“极坐标”渐开线方程表达式中,式1是最直接最简单的表达方法,公式简单,容易理解或记忆。而直角渐开线方程式表达式比较繁琐,不容易理解或记忆,如以下两种方程式的比较:
压力角为参数“极坐标”表示的渐开线方程1:
FAI=T*45
Rb=DB/2
R=Rb/COS(FAI)
平面螺旋线方程
平面螺旋线方程
螺旋线早在古希腊及古埃及就已有所见证,它们在世界历史上占有重要地位。
螺旋线是一种特殊的平面曲线,它们以不断改变的方向旋转来围绕一个轴心,其中有很多旋转曲线通常被分类为螺旋线。
如阿基米德桃花曲线,卡塔尔曲线,贝塞尔曲线等等。
但本文重点介绍的是平面螺旋线,也称渐开线。
渐开线的方程是按照风格给出的,以二次函数的形式表示。
根据渐开线中心点和半径的定义,可以得出以下方程:
$${displaystyle x=Rcostheta ,quad y=Rsintheta +c}$$ 其中,$R$表示渐开线的半径;$c$表示渐开线中心点到原点的距离;$theta$表示渐开线的弧度参数,用来描述渐开线的旋转情况。
平面螺旋线的构造是由一个圆或椭圆的旋转弧线构成的,它以不断改变的方向旋转来围绕一个轴心。
- 1 -。
渐开线方程
渐开线方程
1渐开线方程
渐开线方程是一种微分方程,在几何方面它表示了两个曲线之间的关系,并且可以用来求解复杂的函数关系。
它具有有趣的数学特性,在数学中有重要的应用。
渐开线方程由两个曲线组成,一条曲线是称为渐开线的曲线,而另一条曲线是称为渐开线法则的曲线。
一般来说,渐开线的曲线表示第一个函数的极限值,而渐开线法则的曲线则表示第二个函数的极限值。
当两个函数的极限值相等时,渐开线方程就成立了。
渐开线方程有多种形式,最常用的两种形式分别为渐近线方程和凸线方程。
渐近线方程也可以表示两个几何图形的关系,凸线方程也表示几何图形的关系,但是它的表示性比渐近线方程要强一些。
渐开线方程在微积分中具有重要的应用,用它可以更好地理解复杂的函数关系,从而推导出更正确的解决方案。
当被求解的方程形式特别复杂时,渐开线方程也可以用来进行解析求解。
渐开线方程既有科学价值,又具有数学智力。
它不仅可以用来解决实际问题,还可以帮助我们更好地理解函数关系,它是解决数学问题的一种重要方法。
渐开线方程
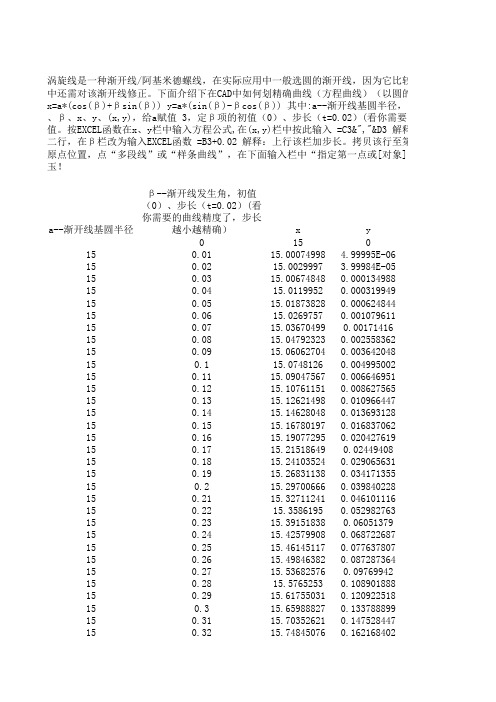
a--渐开线基圆半径β--渐开线发生角,初值(0)、步长(t=0.02)(看你需要的曲线精度了,步长越小越精确)xy 015150.0115.00074998 4.99995E-06150.0215.0029997 3.99984E-05150.0315.006748480.000134988150.0415.01199520.000319949150.0515.018738280.000624844150.0615.02697570.001079611150.0715.036704990.00171416150.0815.047923230.002558362150.0915.060627040.003642048150.115.07481260.004995002150.1115.090475670.006646951150.1215.107611510.008627565150.1315.126214980.010*********.1415.146280480.013693128150.1515.167801970.016837062150.1615.190772950.020*********.1715.215186490.024********.1815.241035240.029*********.1915.268311380.034171355150.215.297006660.0398********.2115.327112410.046101116150.2215.35861950.052982763150.2315.391518380.06051379150.2415.425799080.068722687150.2515.461451170.0776********.2615.498463820.0872********.2715.536825760.0976*******.2815.57652530.108901888150.2915.617550310.120922518150.315.659888270.133788899150.3115.703526210.147528447150.3215.748450760.162168402涡旋线是一种渐开线/阿基米德螺线,在实际应用中一般选圆的渐开线,因为它比较容品中还需对该渐开线修正。
渐开线方程
α
标准齿轮为20°
模数
m
m=p/π
齿厚
s
s=p/2
齿槽宽
e
e=p/2
齿距
p
p=mπ
基圆齿距
pb
pb=pcosα
齿顶高
ha
ha=ha*m=m
齿根高
hf
hf=(ha*+c*)m=1.25m
齿高
h
h=ha+hf=2.25m
分度圆直径
d
d=mz
齿顶圆直径
da
da=m(z+2)
齿根圆直径
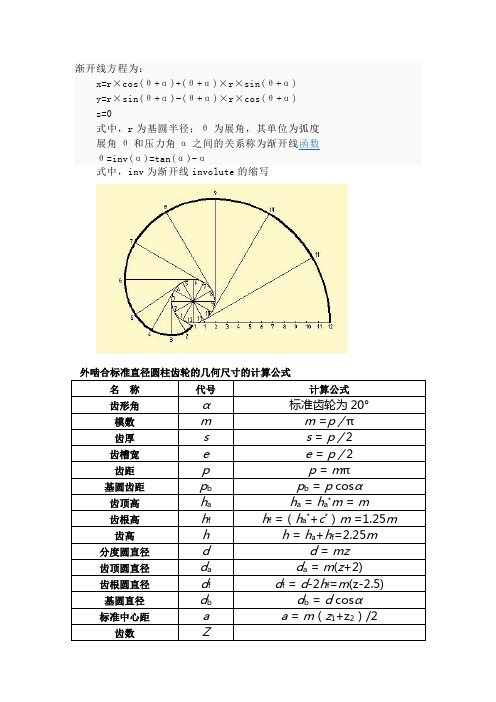
渐开线方程为:
x=r×cos(θ+α)+(θ+α)×r×sin(θ+α)
y=r×sin(θ+α)-(θ+α)×r×cos(θ+α)
z=0
式中,r为基圆半径;θ为展角,其单位为弧度
展角θ和压力角α之间的关系称为渐开线函数
θ=inv(α)=tan(α)-α
式中,inv为渐开线involute的缩写
外啮合标准直径圆柱齿轮的几何尺寸的计算公式
df
df=d-2hf=m(z-2.5)
基圆直径
db
db=dcosα
标准中心距
a
a=m(z1+z2)/2
齿数
Z
举例:
模数m:4
齿数z:10
压力角:20
D=mz=40
Da=48
Df=30
为展角其单位为弧度invtan式中inv为渐开线involute的缩写外啮合标准直径圆柱齿轮的几何尺寸的计算公式代号计算公式齿形角标准齿轮为20模数pbpbhaha齿根高hfhfhahahf225m分度圆直径mz齿顶圆直径dadamz2齿根圆直径dfdfd2hfmz25基圆直径dbdbcos标准中心距举例
渐开线方程式推导
渐开线方程推导
渐开线方程推导(直角坐标系)鱼板主在前面对渐开线的极坐标方程进行了推导,使大家受益匪浅。
直角坐标方程在本论坛上也出现了很多次,但一些朋友对其中的参数理解上还有一定的偏差。
本贴通过对渐开线直角坐标方程(参数方程)推导,使朋友们对其中的参数更加深入的了解,以便在工作中能很好的使用它。
如果大家觉得没有什么意义的话,本贴就当是灌水。
如图:在渐开线上有一点P(X,Y),X=OB+BC,Y=AB-AN由渐开线特点可知,弧长AD=AP=r.βOB=rcosβBC=AP.sinβ=r.β.sinβ所以X=r.cosβ+r.β.sinβ同理Y=r.sinrβ-r.β.cosβ因此,渐开线的直角坐标参数方程就是:X=r.cosβ+r.β.sinβY=r.sinrβ-r.β.cosβ其中r为基圆半径在这里大家可以和渐开线的极坐标方程推导进行比较,直角坐标方程中的β就是压力角和展角的和,β=α+θ图片附件:渐开线.jpg(2005-7-622:40,26.33K)使用autocadvba绘制渐开线齿轮Dim mAsDouble'齿轮模数Dim zAsInteger'齿数Dim rAsDouble'分度圆半径Dim raAsDouble'齿顶圆半径Dim rbAsDouble'基圆半径Dim rfAsDouble'齿根圆半径Dim PIAsDouble'定义常数πPrivateSubCommand1_Click()PI=4*Atn(1)m=Val(TextBox1.text)z=Val(TextBox2.text)r=m*z/2ra=r+mrb=r*Cos(20*PI/180)rf=r-1.25*mDim cobrAsAcadCircle'分度圆Dim cobraAsAcadCircle'齿顶圆Dim cobrbAsAcadCircle'基圆Dim cobrfAsAcadCircle'齿根圆Dim cp1(0To2)AsDoublecp1(0)=0:cp1(1)=0:cp1(2)=0Setcobr=ThisDrawing.ModelSpace.AddCircle(cp1,r)Setcobra=ThisDrawing.ModelSpace.AddCircle(cp1,ra)Setcodrb=ThisDrawing.ModelSpace.AddCircle(cp1,rb)Setcodrf=ThisDrawing.ModelSpace.AddCircle(cp1,rf)Dim colorAsAcadAcCmColorSetcolor=AcadApplication.GetInterfaceObject("AutoCAD.AcCmColor.17")Callcolor.SetRGB(80,100,244)cobr.TrueColor=color'创建splineDim theta0 As Double'定义渐开线展角与压力角之和Dim InvPoint(0To32) As Double'定义拟合点坐标Dim SPtan(0To2) As Double'定义起点切线方向Dim EPtan(0To2) As Double'定义终点切线方向theta0=Sqr(ra^2-rb^2)/rb'将展角与压力角之和角度转换为弧度theta1=theta0-Atn(theta0)'展角delta_theta=theta0/10'单位角For j=0 To 10theta=j*delta_thetaInvPoint(j*3)=rb*(Sin(theta)-theta*Cos(theta))InvPoint(j*3+1)=rb*(Cos(theta)+theta*Sin(theta))InvPoint(j*3+2)=0Next jEPtan(0)=1:EPtan(1)=1/Tan(theta0):EPtan(2)=0Setinvobj=ThisDrawing.ModelSpace.AddSpline(InvPoint,SPtan,EPtan)'创建半个齿顶圆弧Dim center1(0To2) As DoubleDim radius1 As DoubleDim startangle As Double,endangle As DoubleDim arc1 As AcadArccenter1(0)=0:center1(1)=0:center1(2)=0radius1=rastartangle=PI/2-(Tan(PI/9)-PI/9+PI/2/z)endangle=PI/2-(Atn((Sin(theta)-theta*Cos(theta))/(Cos(theta)+theta*Sin(theta)))) Setarc1=ThisDrawing.ModelSpace.AddArc(center1,radius1,startangle,endangle)'齿根圆Dim myplineAsAcadLWPolylineDim vpoint(0To5)AsDoublevpoint(0)=0:vpoint(1)=rbvpoint(2)=-(rb-rf)*Tan(PI/2/z+Tan(PI/9)-PI/9)/2:vpoint(3)=(rb+rf)/2vpoint(4)=-rf*Sin(PI/2/z-Tan(PI/9)+PI/9):vpoint(5)=rf*Cos(PI/2/z-Tan(PI/9)+PI/9) Setmypline=ThisDrawing.ModelSpace.AddLightWeightPolyline(vpoint)mypline.SetBulge1,-1/3mypline.Update'镜像spline、齿根曲线和齿顶圆弧,形成一个齿廓Dim mirror_point1(0 To 2) As DoubleDim mirror_point2(0 To 2) As Doublemirror_point1(0)=0:mirror_point1(1)=0:mirror_point1(2)=0mirror_point2(0)=1:mirror_point2(1)=1/Tan(Tan(PI/9)-PI/9+PI/2/z):mirror_point2(2 )=0Dim mirrorinvobj As AcadSplineDim mirrorarc1 As AcadArcDim mirror_mypline As AcadLWPolylineSetmirrorarc1=arc1.Mirror(mirror_point1,mirror_point2)086Setmirrorinvobj=invobj.Mirror(mirror_point1,mirror_point2)087Setmirror_mypline=mypline.Mirror(mirror_point1,mirror_point2)088'环形阵列齿轮轮齿各部分线段089Dim noOfObjectsAsInteger090Dim angleToFillAsDouble091Dim basePnt(0To2)AsDouble092noOfObjects=z093angleToFill=2*PI*(z-1)/z094basePnt(0)=0#:basePnt(1)=0#:basePnt(2)=0#095096Dim retobjAsVariant097Dim retobj1AsVariant098Dim retobjarc1AsVariant099Dim retobjarcAsVariant100Dim retobj_myplineAsVariant101Dim retobj_mirror_myplineAsVariant102retobj=invobj.ArrayPolar(noOfObjects,angleToFill,basePnt)103retobj1=mirrorinvobj.ArrayPolar(noOfObjects,angleToFill,basePnt)104retobjarc1=mirrorarc1.ArrayPolar(noOfObjects,angleToFill,basePnt)105retobjarc=arc1.ArrayPolar(noOfObjects,angleToFill,basePnt)106retob_mypline=mypline.ArrayPolar(noOfObjects,angleToFill,basePnt)107retobj_mirror_mypline=mirror_mypline.ArrayPolar(noOfObjects,angleToFill,basePnt) 108ZoomAll109110111Command1.Enabled=False112113114EndSub。
creo齿轮渐开线曲线方程
creo齿轮渐开线曲线方程渐开线是指在齿轮啮合过程中,齿轮上任意一点的轨迹,也被称为齿轮曲面。
渐开线具有特殊的几何形态,使得齿轮在传动和运动过程中产生稳定和平滑的运动。
Creo(起初为Pro/ENGINEER)是一款由PTC公司开发的三维建模软件,广泛应用于机械设计和制造领域。
在Creo中,我们可以借助数学方程来定义齿轮的渐开线曲线。
一、齿轮渐开线曲线定义齿轮的渐开线曲线由齿数和齿轮尺寸确定。
Creo中的渐开线曲线方程如下:r = t / m - (1/m + B / m) * sin(t / m) + C,其中,r是渐开线曲线的半径,t是渐开线曲线的角度,m是齿数模数,B和C是与齿轮尺寸相关的常数。
二、参数的含义1. 齿数模数(m):齿数模数是齿轮的尺寸参数,它代表了齿轮齿数和齿轮的直径的比值。
齿数模数决定了渐开线曲线的形状。
一般情况下,齿数模数越大,渐开线曲线越平缓。
2. 常数B和C:常数B和C取决于齿轮的尺寸和几何特征。
它们可以通过齿轮的几何参数计算得出。
三、渐开线曲线的应用1. 传动平稳:齿轮的渐开线曲线可以使得齿轮之间的啮合更加平稳,降低传动过程中的噪声和振动。
这对于高精度和高速传动装置尤为重要。
2. 避免轴向力:渐开线曲线还可以帮助减小齿轮之间的轴向力,避免齿轮轴承的过早损坏。
这对于提高齿轮传动的寿命和可靠性有着重要的影响。
3. 改善齿轮效率:渐开线曲线可以减小齿轮的滚动摩擦,提高齿轮传动的效率。
总结:Creo软件提供了方便的功能来定义齿轮的渐开线曲线方程。
通过准确定义和计算齿轮的渐开线曲线,可以实现高效、稳定和精确的齿轮传动。
在实际的机械设计和制造过程中,掌握和应用齿轮渐开线曲线方程是非常重要的。
在使用Creo软件进行齿轮设计时,我们可以根据具体的齿轮参数来确定渐开线曲线方程,并进行相应的模拟和验证。
通过合理地选择齿轮渐开线曲线方程,可以提高齿轮传动的性能和可靠性。
渐开线曲线方程的应用不仅局限于齿轮设计,还可以在其他领域中使用。
利用复数求圆的渐开线和摆线方程
利用复数求圆的渐开线和摆线方程
渐开线(Rolle’s Theorem)是微积分中的一种重要的思想,其用复数方程求解圆的渐开线和摆线的方程也是一个重要的方法。
首先要知道,一般来说,用抛物线求解圆的渐开线和摆线的方法只适用于椭圆和偏心的椭圆,如果要求解圆的渐开线和摆线,就要用复数求解。
圆的渐开线方程可以由复平面内针对某一点的曲线定义得到。
当此曲线由一个复数写成渐开线(Rolle’s Theorem)的形式时,就可以得到圆的渐开线方程:
设某点M(z)在圆C上,以z0为圆心,以R为半径:
那么从z=z0开始,沿着半径R从M(z)点出发,到圆心z0的实轴上方及圆心z0的虚轴上方表示:
圆的渐开线:
圆的摆线方程也可以用复数求解,当复数表示为eθ 的形式时,可以得到圆的摆线方程:
其中,R为圆的半径,θ为复数eθ在复平面上的实虚圆弧长。
另外,也可以使用复数式方程求解圆的外切线和内切线的方程,圆的外切线方程可以写成:
其中,R为圆的半径,z0为圆心,f(z)自变量的函数值,将f (z)的导数等于0,如果取得极值,就可以得到圆的外切线方程。
圆的内切线方程可以写成:
在这里,R为圆的半径,z0为圆心,f(z)是自变量的函数值,将f(z)的导数等于1,如果取得极值,就可以得到圆的内切线方程。
总而言之,用复数求解圆的渐开线和摆线方程,相比用抛物线方法求解椭圆和偏心椭圆的渐开线和摆线,也是一种很好的求解方法,也可以求出圆的外切线和内切线方程。