机械原理第7版孙恒著4-5章部分答案
机械原理习题册答案
参考答案 第一章 绪论一,填空题1.1 能量,物料,信息1.2运动,动力 1.3制造,运动,装配 二、选择题2.1 D 2.2 B 三,简答题第二章 机械的结构分析二、综合题1.n = 7 ,p l = 9 ,p h = 121927323=-⨯-⨯=--=h l P P n F从图中可以看出该机构有2个原动件,而由于原动件数与机构的自由度数相等,故该机构具有确定的运动。
2. (a )D 、E 处分别为复合铰链(2个铰链的复合);B 处滚子的运动为局部自由度;构件F 、G 及其联接用的转动副会带来虚约束。
n = 8 ,p l = 11 ,p h = 1111128323=-⨯-⨯=--=h l P P n F3. (c )n = 6 ,p l = 7 ,p h = 313726323=-⨯-⨯=--=h l P P n F(e )n = 7 ,p l = 10 ,p h = 0101027323=-⨯-⨯=--=h l P P n F 4. (a )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅱ级组 因为该机构是由最高级别为Ⅱ级组的基本杆组构成的,所以为Ⅱ级机构。
(c )n = 5 ,p l = 7 ,p h = 010725323=-⨯-⨯=--=h l P P n FⅢ级组因为该机构是由最高级别为Ⅲ级组的基本杆组构成的,所以为Ⅲ级机构。
5. n = 7 ,p l =10 ,p h = 0101027323=-⨯-⨯=--=h l P P n FⅡ级组 Ⅲ级组当以构件AB 为原动件时,该机构为Ⅲ级机构。
Ⅱ级组 Ⅱ级组 Ⅱ级组当以构件FG 为原动件时,该机构为Ⅱ级机构。
可见同一机构,若所取的原动件不同,则有可能成为不同级别的机构。
6. (a )n = 3 ,p l = 4 ,p h = 101423323=-⨯-⨯=--=h l P P n F因为机构的自由度为0,说明它根本不能运动。
机械原理(西工大第七版)习题册答案1——7章
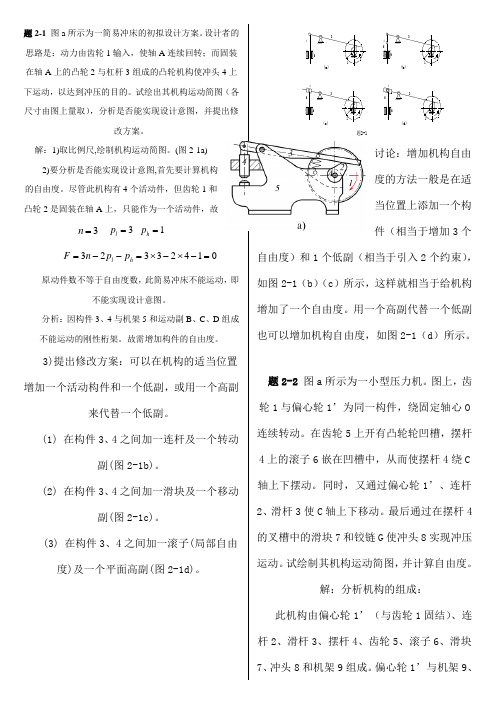
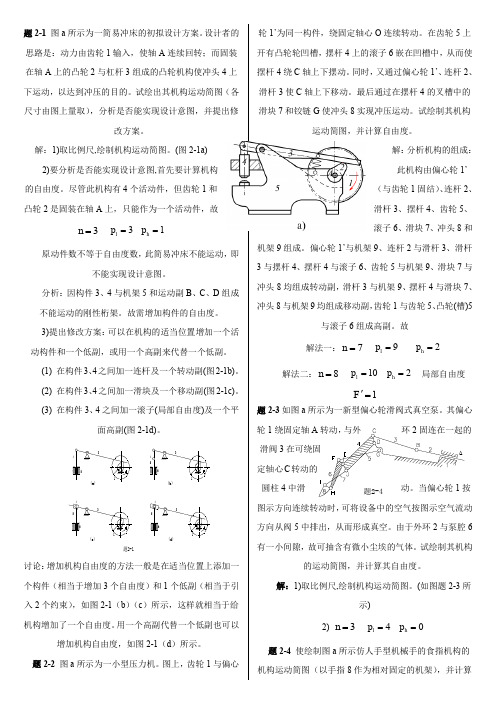
题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
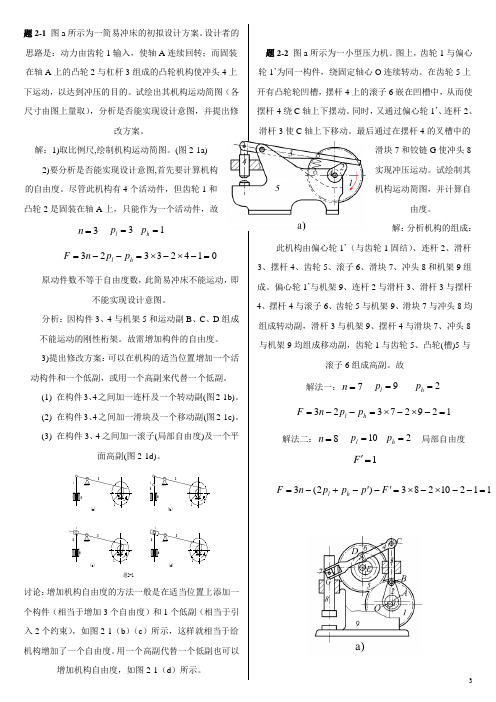
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
机械原理西工大第七版习题册答案章
题2-1 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-1a) 2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-1b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-1c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-1d)。
11(c)题2-1(d)54364(a)5325215436426(b)321讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-2 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
机械原理第2、3、4、6章课后答案西北工业大学(第七版)
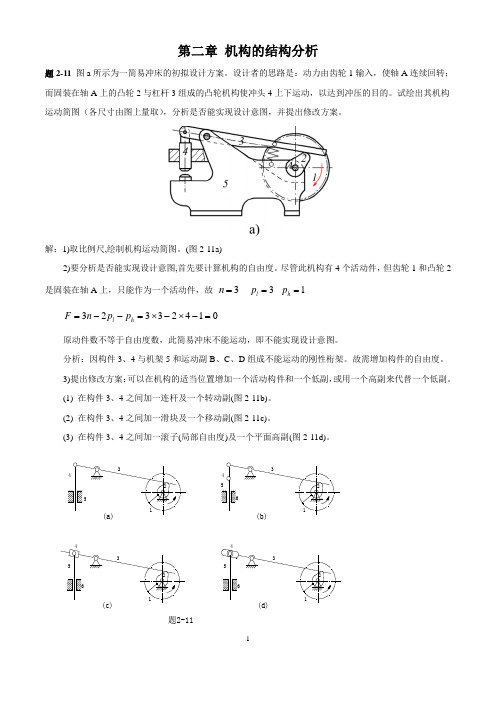
第二章 机构的结构分析题2-11 图a 所示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮1输入,使轴A 连续回转;而固装在轴A 上的凸轮2与杠杆3组成的凸轮机构使冲头4上下运动,以达到冲压的目的。
试绘出其机构运动简图(各尺寸由图上量取),分析是否能实现设计意图,并提出修改方案。
解:1)取比例尺,绘制机构运动简图。
(图2-11a)2)要分析是否能实现设计意图,首先要计算机构的自由度。
尽管此机构有4个活动件,但齿轮1和凸轮2是固装在轴A 上,只能作为一个活动件,故 3=n 3=l p 1=h p01423323=-⨯-⨯=--=h l p p n F原动件数不等于自由度数,此简易冲床不能运动,即不能实现设计意图。
分析:因构件3、4与机架5和运动副B 、C 、D 组成不能运动的刚性桁架。
故需增加构件的自由度。
3)提出修改方案:可以在机构的适当位置增加一个活动构件和一个低副,或用一个高副来代替一个低副。
(1) 在构件3、4之间加一连杆及一个转动副(图2-11b)。
(2) 在构件3、4之间加一滑块及一个移动副(图2-11c)。
(3) 在构件3、4之间加一滚子(局部自由度)及一个平面高副(图2-11d)。
题2-11讨论:增加机构自由度的方法一般是在适当位置上添加一个构件(相当于增加3个自由度)和1个低副(相当于引入2个约束),如图2-1(b )(c )所示,这样就相当于给机构增加了一个自由度。
用一个高副代替一个低副也可以增加机构自由度,如图2-1(d )所示。
题2-12 图a 所示为一小型压力机。
图上,齿轮1与偏心轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
机械原理(西工大第七版)习题册答案1——7章
题入2轮1’为同一构件,绕固定轴心O 连续转动。
在齿轮5上开有凸轮轮凹槽,摆杆4上的滚子6嵌在凹槽中,从而使摆杆4绕C 轴上下摆动。
同时,又通过偏心轮1’、连杆2、滑杆3使C 轴上下移动。
最后通过在摆杆4的叉槽中的滑块7和铰链G 使冲头8实现冲压运动。
试绘制其机构运动简图,并计算自由度。
解:分析机构的组成: 此机构由偏心轮1’(与齿轮1固结)、连杆2、滑杆3、摆杆4、齿轮5、滚子6、滑块7、冲头8和机架9组成。
偏心轮1’与机架9、连杆2与滑杆3、滑杆3与摆杆4、摆杆4与滚子6、齿轮5与机架9、滑块7与冲头8均组成转动副,滑杆3与机架9、摆杆4与滑块7、冲头8与机架9均组成移动副,齿轮1与齿轮5、凸轮(槽)5与滚子6组成高副。
故 解法一:7=n 9=l p 2=h p 解法二:8=n 10=l p 2=h p 局部自由度1='F题2-3如图a 所示为一新型偏心轮滑阀式真空泵。
其偏心轮1绕固定轴A 转动,与外环2固连在一起的滑阀3在可绕固定轴心C 转动的圆柱4中滑动。
当偏心轮1按图示方向连续转动时,可将设备中的空气按图示空气流动方向从阀5中排出,从而形成真空。
由于外环2与泵腔6有一小间隙,故可抽含有微小尘埃的气体。
试绘制其机构的运动简图,并计算其自由度。
解:1)取比例尺,绘制机构运动简图。
(如图题2-3所示)2) 3=n 4=l p 0=h p题2-4 使绘制图a 所示仿人手型机械手的食指机构的机构运动简图(以手指8作为相对固定的机架),并计算题2-4其自由度。
解:1)取比例尺,绘制机构运动简图。
(2) 7=n 10=l p =h p 题2-5 图a 关节机构,机架,试绘制其机构运动简图和计算其自由度,90度时的机构运动简图。
解:1)取比例尺,时的机构运动简图如虚线所示。
(如图2-5所示)2) 5=n 7=l p 0=h p题2-6 试计算如图所示各机构的自由度。
图a 、d 为齿轮-连杆组合机构;图b 连杆组合机构(图中在D 处为铰接在一起的两个滑块);图c 所示机构中,齿轮3与5和齿条7与齿轮5解: a) 4=n 5=l p b) 解法一:5=n 6=l p 解法二:7=n 8=l p 2=h p 局部自由度 2='Fc) 解法一:5=n 7=l p 解法二:11=n 17=l p 虚约束10232+⨯='-'+'='n p p p hl 局部自由度 0='F d) 6=n 7=l p =h p 齿轮3与齿轮5的啮合为高副约束,故应为单侧接触)将提供1齿条7与齿轮5故应为双侧接触)将提供2题2-7试绘制图a 所示凸轮驱动式四缸活塞空气压缩机并计算其机(图中凸轮1原动当其转动时,分别推动装于四个活塞上A 、B 、C 、D 使活塞在相应得气缸内往复运动。
机械原理 第四章练习题(答案)

方向如图所示。若不计两滑块质量, 试完成:(1)求该机构反行程做 等速运动时所需的力F的表达式; (2)求该机构反行程时的效率并 确定其自锁条件 。
图示楔块机构中,已知γ =β=60°,Q为工作阻力 , F为驱动力,方向如图 所示,各接触面之间的摩
擦角均为φ。试完成: (1)求该机构反行程做等 速运动时所需的力F的表 达式;(2)求该机构反行 程时的效率并确定其自锁
条件 。
此课件下载可自行编辑修改,此课件供参考! 部分内容来源于网络,如有侵权请与我联系删除!
机械原理--第七版
机械原理复习题第2 章机构的结构分析1.组成机构的要素是构件和运动副;构件是机构中的运动单元体。
2.具有若干个构件的入为组合体、各构件间具有确定的相对运动、完成有用功或实现能量转换等三个特征的构件组合体称为机器。
3.机器是由原动机、传动部分、工作机所组成的。
4.机器和机构的主要区别在于是否完成有用机械功或实现能量转换。
5.从机构结构观点来看,任何机构是由机架,杆组,原动件三部分组成。
6.运动副元素是指构成运动副的点、面、线。
7.构件的自由度是指构件具有独立运动的数目 ; 机构的自由度是指机构具有确定运动时必须给定的独立运动数目。
8.两构件之间以线接触所组成的平面运动副称为高副,它产生一个约束,而保留了两个自由度。
9.机构中的运动副是指两构件直接接触而又能产生相对运动的联接。
10.机构具有确定的相对运动条件是原动件数等于机构的自由度。
11.在平面机构中若引入一个高副将引入 1 个约束,而引入一个低副将引入 2 个约束,构件数、约束数与机构自由度的关系是 F=3n-2pl-ph 。
12.平面运动副的最大约束数为 2 ,最小约束数为 1 。
13.当两构件构成运动副后,仍需保证能产生一定的相对运动,故在平面机构中,每个运动副引入的约束至多为2,至少为 1。
14.计算机机构自由度的目的是判断该机构运动的可能性(能否运动〕及在什么条件下才具有确定的运动,即确定应具有的原动件数。
15.在平面机构中,具有两个约束的运动副是低副,具有一个约束的运动副是高副。
16.计算平面机构自由度的公式为 F 3n2pLpH ,应用此公式时应注意判断:(A)复合铰链,(B)局部自由度, (C)虚约束。
17.机构中的复合铰链是指由三个或三个以上构件组成同一回转轴线的转动副;局部自由度是指不影响输入与输出件运动关系的自由度;虚约束是指在特定的几何条件下,机构中不能起独立限制运动作用的约束。
18.划分机构杆组时应先按低的杆组级别考虑,机构级别按杆组中的最高级别确定。
机械原理(第七版)作业答案1-8-A4

第二章平面机构的结构分析2—1试画出唧筒机构的运动简图,并计算其自由度。
解:n = 3 ,pl = 4 ,p = 0hF = 3n − 2 p −pl h= 3 × 3 − 2 × 4= 12—2试画出缝纫机下针机构的运动简图,并计算其自由度。
解:n = 3 ,pl = 4 ,p = 0hF = 3n − 2 p −pl h= 3 × 3 − 2 × 4= 1班级成绩姓名任课教师学号批改日期- 1 -2—3试画出图示机构的运动简图,并计算其自由度。
解:或n = 3 ,pl = 4 ,p = 0hF = 3n − 2 p −pl h = 3 × 3 − 2 × 4= 12—4试画出简易冲床的运动简图,并计算其自由度。
n = 5 ,p = 7 ,p = 0l hF = 3 n − 2 p −pl h解:= 3 × 5 − 2 ×7= 1班级成绩姓名任课教师学号批改日期- 2 -2—5图示为一简易冲床的初拟设计方案。
设计者的思路是:动力由齿轮 1输入,使轴 A连续回转,而装在轴 A上的凸轮 2与杠杆 3组成的凸轮机构使冲头 4上下运动,以达到冲压的目的,试绘出其机构运动简图,分析是否能实现设计意图,并提出修改方案。
解:机构简图如下:机构不能运动。
n = 3 ,pl = 4 ,p = 1hF = 3 n − 2 pl −ph可修改为:n = 4 ,pl= 3 × 5 − 2 × 7 − 1= 0或= 5 ,p = 1hF = 3n − 2 p −p 班级成绩l h= 3× 4 − 2 × 5 −1 姓名任课教师= 1 学号批改日期- 3 -或虚约束。
E DDE =FCCF = HG解 1:C 、F 为复合铰链,I 为局部自由度, EFGC 为 虚 约 束 。
n = 12 , p= 17 , p = 1 , F ′ = 1 , p ′ = 1B A IG HJKNlhF = 3 n − 2 p − p − F ′ + p ′l h= 3 × 12 − 2 × 17 − 1 − 1 + 1 = 1解 2:C 为复合铰链,I 为局部自由度(焊死),EFGC 为 虚 约 束 ( 去 掉 )。