机器人干涉设置及应用
NACHI机器人程序说明及干涉信号设定

干涉定义:两个或多个事物在时间轴上和空间轴上有重叠,即在某个时间内会同时到达同一区域实际可以减少的干涉区:工艺分配上要减少空间轴的重叠;实际存在但运行可以错开的干涉区:焊点点序定义时要减少时间轴的重叠,这个意义的干涉区要求研究干涉信号编制方法1、确定机器人工作顺序2、确定彼此的所有干涉区3、确定个机器人达到各干涉区的时间4、使用PROJECT以项目的形式将两机器人任务确定,并包含任务先后关系5、从时间轴上对比到达干涉区的先后顺序,先到先进干涉区6、因为任何一者先完成也没有意义,所以两者任务是完全关联的,有先后关系的一、下面介绍的2个机器人的I/O干涉信号设定时非常经典的,经过日本和台设:M32是置位,M34是复位,I/O信号为M3对应I31L ROBOTSTEP1應如何設定干涉信號:M34【3】先进入的机器人进入干涉区前将干涉信号OFFSTEP2應如何設定干涉信號:M34【3】再次将干涉信号OFF,确认进入干涉区后,其他机器人不进入干 I3 wait等待I3信号,I3 ON后,才能进入干涉区STEP3應如何設定干涉信號:M32【3】离开干涉区后,必须将干涉信号ON,允许其他机器人进入干涉1R ROBOTSTEP1應如何設定干涉信號:M32【3】STEP2應如何設定干涉信號:I3 wait等待I3信号,I3 ON后,才能进入干涉区 M34【3】机器人进入干涉区后将干涉信号OFFSTEP3應如何設定干涉信號:M32【3】离开干涉区后,必须将干涉信号ON,允许其他机器人进入干涉二、根据上述1个干涉区,推广至多干涉区(各干涉区相互干涉)设:M32是置位,M34是复位,I/O信号为M3对应I31L ROBOT1R ROBOTS1:M34[3]S1:M32[3]S2:M34[3]S2:I3 waitI3 wait M34[3]干涉区1干涉区1S3:M32[3]S3:M32[3]S4:M34[3]S4:S5:M34[3]S5:I3 waitI3 wait M34[3]干涉区2干涉区2S6:M32[3]S6:M32[3]S7:M34[3]S7:S8:M34[3]S8:I3 waitI3 wait M34[3]干涉区3干涉区3S9:M32[3]S9:M32[3]三、根据上述1个干涉区,推广至多干涉区(干涉区相互独立)设:M32是置位,M34是复位,I/O信号为M3/4/5对应I3/4/51R ROBOTS1:S2:S3:S4:S5:S6:S7:S8:S9:S1:S2:S3:S4:S5:S6:S7:S8:S9:四、根据上述1个干涉区,推广至多干涉区(干涉区既有相互独立,又有相互设:M32是置位,M34是复位,I/O信号为M3/4/5对应I3/4/5S4S7S71L ROBOT1R ROBOTS1:S2:S3:S4:S5:S6:S7:S8:S9:时到达同一区域。
安川机器人干涉区

干涉区干涉区的概念机器人的控制点TCP 到达某干涉区域的内侧或外侧时,可以输出状态信号(内侧为ON,外侧为OFF)。
机器人进入此区域时,相应的输入信号就被检测(如:禁止进入信号),只要有一个输入信号,机器人立即停止,处于等待状态,直到这个信号被清除。
I/O 部分进行这项处理工作。
干涉区的形式干涉区最多可设定32,其形式可以从以下二种中选择:• 立方体干涉区• 轴干涉区立方体干涉区立方体干涉区是与基座坐标、机器人坐标、用户坐标中任一坐标轴平行的立方体。
控制柜对机器人控制点进行判断,判断是在干涉区内还是干涉区外,并把判断情况以信号方式输出。
立方体干涉区作为基座坐标系或用户坐标系的平行的区域设定。
轴干涉区轴干涉区,是指判断各轴当前位置并输出信号的功能。
设定各轴正方向、负方向各自动作区域的最大值和最小值,判断各轴当前值是在区域内侧或外侧,并将该状态作为信号输出。
(ON: 区域内, OFF: 区域外)干涉区的建立方法立方体干涉区的建立方法立方体干涉区的设定方法有以下3种:输入立方体的坐标值输入立方体坐标的最大值和最小值。
具体操作步骤参考操作要领书 10-22。
示教顶点用轴操作键把机器人移到立方体的最大/最小位置。
具体操作步骤参考操作要领书 10-25。
输入立方体边长并示教中心点输入立方体的三边边长(轴长)数值后,用轴操作键把机器人移到中心点。
具体操作步骤参考操作要领书 10-26。
轴干涉区的建立方法数值输入轴数据具体操作步骤参考操作要领书 10-27。
用轴操作键移动机器人设定轴数据具体操作步骤参考操作要领书 10-29。
干涉区的工作机理梯形图程序40090 顺序等待此信号为开时,机器人的动作暂时停止。
功能与“hold暂停”相似,但有以下两点不同。
1. 机器人在动作过程中如果此信号为开,机器人为暂时停止状态,内部保持运转状态。
移动命令(MOV)以外的命令执行时不受影响。
“启动”灯为点亮状态。
“运转中”信号为开。
基于RobotStudio的机器人干涉区设定方法及工程应用

措施 。 同前各大机 器 人 家 采用的空
问定化 方式有 一种 :几f u J 体空 间定
位 、轴 空间定位和轨迹空 间定位 。
其 中【 \ I n s i d e 1 I 【 \ Ou t s i d e 】 和
I S h a p e ‘ : = ’I 参数定义与立方体定
置 、定 义方式因机 器人品牌而 异 。
系统组 建 J 作站 仿真 系统 ,按 照工 艺流 程设 定仿 真顺序 ,通过 反 复验 证的 方法 在 个机器人 程 序【 { 】 建立
1 二 涉 ,修 改保存 机器 人程序 ,将
以A B B 机 器人 为例 ,立方体监
视审 定 义函数为 :
W ZB o x De f
修改完成的程序导入到实际机器人
控 制 系统 中进 行应用测试 。该 办法
[ \ I n s i d e ] I l \ Ou t s i d e ] [ S h a p e ‘ : =’] [ L o wP o i n t ‘ : =’1
已经 在 多个项 日的实 际调试 中得到 验 汪 ,其准 确性 、实用性 及调 试速
庀有 点焊 、弧 焊 、搬 运 、喷涂 、涂
胶和滚边 等 【 : 作站 。往机 器 人的调 试过程 中 , “ 在线示 教 ”依然是 主
流的调试手段 。 所谓 “ 侄 线 示 教 编 程 ” ,就 是调试 人 员在调试现 场通 过示教 器 况 复杂 ,后期运行 隐患 大 。弥 补
・
义圆柱体 的半 ,【 He i g h t‘ : =’1 参数表示 被定 义咖柱体 的高 度 ,如
图2 所示 。
件 ,在R o b o t S t u d i o 中建立虚拟控 制
机器人干涉区及互锁

机器人干涉区及机器人互锁信号干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:1)、关于程序结束时,干涉区信号的状态ON :程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系: 信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、 不同的干涉区使用不同的干涉信号:如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、 干涉信号地址分配:从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC 程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:4工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R2机器人与R4机器人之间的互锁:R2机器人为焊接机器人,在工作台位置进行工件焊接,R4为搬运机器人,2台机器人在工作台位置处存在干涉现;工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
PDPS机器人虚拟调试--PS篇第六课 机器人示教及干涉检查
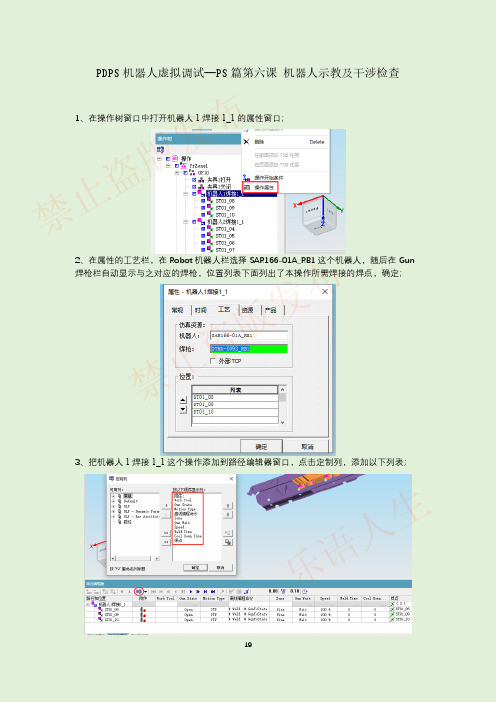
PDPS 机器人虚拟调试--PS 篇第六课 机器人示教及干涉检查1、在操作树窗口中打开机器人1焊接1_1的属性窗口;2、在属性的工艺栏,在Robot 机器人栏选择SAR166-01A_RB1这个机器人,随后在Gun焊枪栏自动显示与之对应的焊枪,位置列表下面列出了本操作所需焊接的焊点,确定;3、把机器人1焊接1_1这个操作添加到路径编辑器窗口,点击定制列,添加以下列表;禁止盗版发布禁止盗版发布乐语人生4、点击操作一栏下的添加当前位置命令;5、在机器人1焊接1_1这个操作下面新建一个点,并修改名称为Home_RB1_1作为机器人1的原点;6、选中新建的点,点击操作一栏下的操控位置命令;7、如下图所示,设置机器人的关节角度;禁止盗版发布禁止盗版发布乐语人生8、选中第一个焊点ST01_08,然后鼠标右键选择跳转指派的机器人,机器人将跳转到ST01_08焊点位置;9、若提示机器人无法到达,可打开饼图,使切入角的方向进入蓝色区域,关闭;10、从快捷工具栏上选择位置操控命令,调整机器人的姿态,避免干涉(焊点不能移动,只能转动机器人,改变机器人的姿态);禁止盗版发布禁止盗版发布乐语人生11、选中跟踪模式,然后点击位置翻转,三维视图中焊枪姿态跟着一起变化,转动Rz ,使焊枪到达合理姿态;12、点击此处,调整下一个焊点;13、如下图所示,三个焊点的姿态不一致,可通过对齐位置命令将其姿态修改一致;禁止盗版发布禁止盗版发布乐语人生14、选中右侧红圈的两个焊点ST01_09、ST01_10,然后选择对齐位置命令,打开对话框,绿色方块选择目标焊点ST01_08,确定;15、结果如下图,ST01_09、ST01_10两个焊点的姿态修改为ST01_08一致的姿态;16、下面在第一个焊点前添加过度点,选中ST01_08右键,在前面添加位置;17、如图,机器人调整窗口中将via 点沿z 负向移动20mm ,(或者通过位置操控面板调整via 点的位置);禁止盗版发布禁止盗版发布乐语人生18、重复以上步骤,添加其他的过度点,如下图所示;19、、打开干涉查看器,选择New Collision Set 新建干涉,设置干涉检查的约束条件;20、建议在Object Tree 中进行选择,向左侧添加机器人和焊枪,向右侧添加夹具组和零件;21、选择确定之后,我们得到了第一个约束条件,在前面打上对勾,使用这个约束条件进行检测,同时点击Collision Mode On\Off ,激活干涉检查模式;禁止盗版发布禁止盗版发布乐语人生22、再次运行仿真,焊枪在最后回原点的时候干涉到夹具、零件,我们需要调整焊枪的运动路径;23、同时从干涉查看器窗口也可以看出,是焊枪和夹具、零件发生了碰撞;24、重新优化路径,直至没有干涉,示教完所有的路径后,点击OP10右键设置为当前操作,然后再序列编辑器就可以看到OP10下面所有的操作按顺序链接,点击播放,查看所有示教路径,保存、完成(这里回转台作为单独的机构进行仿真运行,未将其设置为机器人的外部轴来使用,机器人外部轴的设定将在后面的章节进行讲解);禁止盗版发布禁止盗版发布乐语人生25、选中机器人焊接路径,选择机器人一栏下的扫掠体命令;26、完成后如下图所示,形成两台机器人焊接路径的扫掠体;27、选中两条扫掠体,然后右键创建干涉体;28、完成后将两条扫掠体隐藏,干涉体以红色显示,优化焊接路径,见下图;29、the end禁止盗版发布禁止盗版发布乐语人生。
ABB机器人调试规范最终版

ABB机器⼈调试规范最终版ABB机器⼈调试规范1 范围本标准规定了ABB机器⼈点焊、弧焊、螺柱焊、涂胶⼯艺的调试规范。
本标准适⽤于长城汽车股份有限公司焊装车间ABB机器⼈点焊、弧焊、螺柱焊、涂胶⼯艺应⽤。
2 规范性引⽤⽂件下列⽂件对于本⽂件的应⽤是必不可少的。
凡是注⽇期的引⽤⽂件,仅所注⽇期的版本适⽤于本⽂件。
凡是不注⽇期的引⽤⽂件,其最新版本(包括所有的修改单)适⽤于本⽂件。
3 术语和定义下列术语和定义适⽤于本标准。
3.1⼯件坐标系 workpiece coordinate system固定于⼯件上的笛卡尔坐标系。
4 安全注意事项4.1 ⼯作中的安全4.1.1 如果在保护空间内有⼯作⼈员,请⼿动操作机器⼈系统。
4.1.2 当进⼊保护空间时,请准备好⽰教器FlexPendant,以便随时控制机器⼈。
4.1.3 注意旋转或运动的⼯具,确保在接近机器⼈之前,这些⼯具已经停⽌运动。
4.1.4 注意⼯件和机器⼈系统的⾼温表⾯。
机器⼈电动机长期运转后温度很⾼。
4.1.5 注意夹具并确保夹好⼯件。
4.1.6 注意液压、⽓压系统以及带电部件。
4.2 ⽰教器的安全⽰教器FlexPendant是⼀种⾼品质的⼿持式终端,它配备了⾼灵敏度的⼀流电⼦设备。
为避免操作不当引起的故障或损害,操作时遵循以下说明:——⼩⼼操作,不要摔打、抛掷或重击FlexPendant,在不使⽤该设备时,将它挂到专门存放它的⽀架上;——FlexPendant的使⽤和存放应避免被⼈踩踏电缆;——切勿使⽤锋利的物体(例如螺钉旋具或笔尖)操作触摸屏,应⽤⼿指或触摸笔(位于带有USB 端⼝的FlexPendant的背⾯)去操作⽰教器屏幕;——定期清洁触摸屏;——切勿⽤溶液、洗涤液或擦洗海⾯清洁FlexPendant ,使⽤软布蘸少量⽔或中性清洁剂清洁; ——没有连接USB 设备时必须盖上USB 端⼝的保护盖。
4.3 ⼿动模式下的安全4.3.1 在⼿动减速模式下,机器⼈只能减速(250 mm/s 或更慢)操作(移动)。
基于RobotStudio的机器人干涉区设定方法及工程应用
基于 RobotStudio 的机器人干涉区设定方法及工程应用摘要:本文所的研究重点是中国现阶段工业机器人的运营管理系统和软件控制技术发展,首先经过对瑞典ABB企业所研制的计算机编程软件系统RobotStudio 进行系统分析和深入研究,构建了基于具体应用环境的企业人工智能实时、离线干预区域管理的系统设计方案,最后再经过具体的项目实践数据分析,总结干预区域设计技术下的工业机器人的应用优势。
关键词:RobotStudio;机器人干涉区;设定方法;工程应用二十一世纪,已成为了机器人与人共处的全新时期,而机器人技术也正在日益的发展引起着人们的重视.在机器人应用中,除去其本体以外,还需要包括其他的机械操作设备,也就是人们通常所说的机器人移动操作装置.而假如把任何和机器人协作的人和机器,都置身于机器人作业轨迹空间中工作的话,往往就会存在着由于其干涉区域问题,所产生的高风险现象.与以往机械加工装置相比,机器人的作业空间中也就往往不能稳定工作.而这个问题既对使用人员造成了不安全危害,同时也提高了应用人工智能的困难度.而干涉区域功能问题,正是克服这种问题的一个手段.而对于怎样在人工智能使用中合理利用这个功能,就变成了人工智能厂商和其使用者双方共同关注的课题,也因此二者都需要对其干预区域的理论和特性,进行更为深入的研究,1RobotStudio概述本文在对工业机器人进行管理技术的研究和创新之时,采用了由瑞典语作业基础预算公司所开发的工业机器人程序设计软件系统RobotStudio,该软件主要运用了作业基础预算公司最先进的virtualrobotTM软件技术,可以进行在离线方式状态下的自动化机器人程序设计和模拟。
在国外市场,robotstudio软件因其离线编程能力和自主控制技术而受到广泛关注和赞赏。
在实际应用中,该软件还可以直接导入机器人框架中使用的各种三维模式,并通过自动路径捕获和自动生成完成仿真构建。
同时,操作员可以通过仿真界面直观地实现系统配置和机器人编程的使用,,从而达到了在线监控作业和离线编程等不同的作业特性。
机器人干涉区及互锁教学文案
机器人干涉区及互锁机器人干涉区及机器人互锁信号干涉区描述:同一工位的机器人,在工作过程中,需要进入到同一个区域,但在进入的先后次序无严格的限定,即:任意一台机器人先进入,在工艺上都允许(除了影响运行时间外),允许使用干涉区信号对控制机器人运行,防止机器人之间碰撞。
对于有严格的工艺时序的干涉,采用互锁信号来控制。
1、机器人干涉区采用绝对优先方式,说明如下:R4机器人优先,使用干涉信号“17”,R2机器人输出OT#(17),为R4机器人输入IN#(17);R4机器人输出OT#(17),为R2机器人输入IN#(17)。
说明:1)、关于程序结束时,干涉区信号的状态ON :程序结束后状态:R2机器人的OT#(17)ON ;R4机器人的OT#(17)ON 。
干涉区允许信号保持ON 状态;因为 如果R4的干涉信号OFF ,则必须知道R2机器人已经离开干涉区,这样机器人之间还需要更多的交互信号;如果在R2\R4都循环完成后OFF ,则可能影响机器人利用效率。
2)、2次干涉信号允许确认:防止2台机器人同时进入干涉区,既:机器人禁止另一台进入信号已经发出,但对方尚未接收到信号时刻,2台机器人存在同时进入了干涉区的可能性。
3)、在PLC 编程中,信号关系:信号对应关系如下(仅供参考),目的说明与互锁信号的区别。
2、不同的干涉区使用不同的干涉信号:如果两台机器人之间存在多个干涉区,则要求使用不同的干涉区信号。
3、干涉信号地址分配:从IN/OT--9开始,机器人之间干涉区数量按照4个进行预留,即:只要使用数量不超过4个,则存在干涉区机器人,在生产线交互信号中PLC程序中,按照4个干涉区信号进行预留编程。
干涉信号地址分配表:4、机器人之间的互锁:工位之间的机器人、同一工位的机器人之间干涉现象,但不属于干涉区描述属性时,采用互锁信号来处理。
R22台机器人在工作台位置处存在干涉现;工作时序:R2机器人焊接完成后,工作台夹具打开,R4机器人才能进行搬运。
1-机器人信号表与干涉区-参考
C32B主线机器人I/O表与干涉区2016目录目录 (1)干涉区讲解 (1)机器人与附属设备站点划分 (5)现场硬接线信号分配表 (5)烟台宇信C32B项目信号总表 (6)UB10-1 (9)UB10-2 (11)UB20-1 (12)UB20-2 (13)UB20-3 (14)UB20-4 (15)UB30-1 (16)UB30-2 (17)UB30-3 (18)UB30-4 (19)UB40-1 (20)UB40-2 (21)UR30-1 (22)UR50-1 (23)UR50-2 (24)UR50-3 (25)UR50-4 (27)UR60-1 (29)UR60-2 (30)UR60-3 (31)UR60-4 (32)UR70-1 (33)UR70-2 (34)UR70-3 (35)UR70-4 (36)UR80-1 (37)UR80-2 (38)MB20-1 (39)MB20-3 (43)MB20-4 (44)MB20-5 (45)MB20-6 (46)MB20-7 (47)MB20-8 (48)MB20-9 (49)MB20-10 (50)MB40-1 (51)MB40-2 (52)MB40-3 (53)MB40-4 (54)MB50-1 (55)MB50-2 (56)MB60-1 (57)MB70-1 (58)MB70-2 (59)MB70-3 (61)MB70-4 (62)MB70-5 (63)MB70-6 (64)MB80-1 (65)MB80-2 (66)MR20-1 (67)MR20-2 (68)MR20-3 (69)MR20-4 (70)MR30-1 (71)MR30-2 (72)MR30-3 (73)MR30-4 (74)MR40-1 (75)MR40-2 (76)MR50-1 (77)MR50-3 (79)MR50-4 (80)MR60-1 (81)MR60-2 (82)MR60-3 (83)MR60-4 (84)MR100-1 (85)MR100-2 (86)MR100-3 (87)MR100-4 (88)MR110-1 (89)MR110-2 (90)MR110-3 (91)MR110-4 (92)MR130-1 (93)MR140-1 (94)MR140-2 (95)MR140-3 (96)MR140-4 (97)干涉区讲解干涉区:同一工位的机器人,在运行工作中,需要和另外一台或多台机器人进入同一工作空间范围内,定义为干涉区。
机器人干涉区原理
机器人干涉区原理一、引言机器人在现代生产中扮演着越来越重要的角色,它们能够完成繁琐、重复、危险或无法人力完成的工作。
然而,在机器人工作过程中,干涉区问题是一个不可避免的问题。
本文将详细介绍机器人干涉区的原理。
二、机器人干涉区定义机器人干涉区指的是机器人在工作时,其运动轨迹与其他物体(如固定设备、其他机器人或操作员)所在空间发生冲突的区域。
这些冲突可能会导致设备损坏、伤害操作员或影响生产效率等问题。
三、机器人干涉区的分类根据不同的分类标准,机器人干涉区可以分为以下几种类型:1. 传统干涉区:指的是机器人运动轨迹与其他物体发生碰撞或交叉的区域。
这种类型的干涉主要由于运动规划算法不当或传感器故障等原因引起。
2. 动态干涉区:指的是由于外部因素(如风、震动等)或其他运动物体(如移动平台)引起的机器人运动轨迹与其他物体发生碰撞或交叉的区域。
3. 人机干涉区:指的是机器人运动轨迹与操作员所在空间发生冲突的区域。
这种类型的干涉主要由于操作员误入机器人工作空间或机器人未能及时检测到操作员等原因引起。
四、机器人干涉区检测方法为了避免机器人干涉问题,需要对干涉区进行检测。
现有的机器人干涉区检测方法主要包括以下几种:1. 基于传感器的检测:通过安装传感器(如激光雷达、红外线传感器等)来检测机器人周围环境中的障碍物,从而避免机器人与其他物体发生碰撞。
2. 基于模型的检测:通过建立机器人和周围环境的三维模型,利用计算机仿真技术来预测机器人运动轨迹,从而避免与其他物体发生冲突。
3. 基于规划算法的检测:通过优化运动规划算法,使得机器人在工作过程中不会与其他物体发生碰撞或交叉。
四、机器人干涉区解决方法当机器人发生干涉问题时,需要采取相应的解决方法。
现有的机器人干涉区解决方法主要包括以下几种:1. 停止机器人运动:当机器人检测到干涉区时,立即停止运动,以避免与其他物体发生碰撞。
2. 路径规划调整:通过重新规划机器人的运动轨迹,使得其能够避开干涉区。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
防范干涉于未然
作业中所有可能发生干涉的干涉区都要设置信号以防万一
4 3 2 4 3 2 1
因意想不到的 原因突然停止
5 1
A
B
A号机工作区域
B号机工作区域
参考左图,不难发现,如果A在打干涉区 中①、②点的时候点的时候,B在打干涉 区外①、②点的情况下,干涉区或许会被 巧妙错过。 但此时如果A由于未知原因突然停止于干 涉区中,而B因为没有接受到任何信号而 持续打点的话,那双方则会发生碰撞事故。 因此为避免上述情况的发生,在非直接干 涉的干涉区存在的情况下,也要设置干涉 信号,作为保护措施。 干涉区域不一定仅仅存在于2台机器人之间, 周边还有其他机器人的情况下,所有的因 动作组合而存在的干涉区,都需要进行确 认与设置。
机器人不论采用哪种方式进行交信,其信号都需要进行1对1的设置。 只有相互设置了信号的机器人之间,可以针对双方作业干涉区进行 机器人干涉信号设置。
何为干涉区?确定干涉区范围后怎么办?
干涉区
干涉区就是各机器人因作业需要, 共同经由或滞留的空间。
A号机作业区 B号机作业区
停
停
确认好干涉区范围之后,将机器 人各自在进入干涉区之前设置等 待动作 !!!必须确认等待中的机器人 是否完全处于干涉区之外
A
B
一项工作的完成是以所有参加工作的机器人动作停止为结点的
进入信号与脱离信号
ON并不代表进入,OFF也不是意味着脱离。
ON与OFF的本意是开启和关闭的意思,这很容易让我们联想到进入和脱 离。但在MOTOSIM当中ON与OFF所代表的含义,则是信号,而脱离发出ON信号的形式 进行作业。 多使用进入发出OFF信号,脱离发出ON信号形式的原因 假设A机器人信号设置为 进入发出ON信号,脱离发出OFF信号的形式。那 么A机器人在干涉区中作业时,突然发生断电,或其他原因造成该机器人的 信号关闭,都会导致B机器人接收到OFF的信号,从而进入干涉区造成机器 人的碰撞等事故。 如果A机器人信号设置为 进入发出OFF信号,脱离 发出ON信号的形式。那么就算发生以上的断电等事 故,B机器人由于接收不到ON的信号,于是一直等 待,从而避免了事故的发生。
在高效完成作业的前提下设置干涉
由于干涉区的存在,造成机器人单独作业,从而降低生产效率的现象。 因此在设置干涉的时候,必须根据各机器人的作业量以及作业顺序, 设置最合理,最效率的干涉区作业步骤。
分析例
左图所示 ROB-A的作业为4个点, ROB-B的作业为5个点。 因此B的作业在无干涉的情况下必然慢于A。 如此在干涉区中进行作业时,如果以原本 慢的B等待A的形式进行作业的话,B完成 作业的时间将会更长,因此影响到生产效 率。 所以设置干涉的时候要以B先作业的形式 进行生产。
机器人干涉设置及应用
2013.2.17
何为机器人间的干涉?
机器人在作业过程中,或者在运行过程中,两个或 两个以上的零件(或部件)同时占有同一位置而发生冲突叫干涉。 因干涉而引起的后果
--机器人的部件损坏 --机器人程序混乱 --加工中工件的损坏 --周边其他设备设施的损坏
何为机器人间的交信?
机器间交信大多是通过感应器来进行的,一般是远红外接收器,还有蓝牙,或者是雷达, 要看接受的数据形式是什么。最直接的就是摄像头,由摄像头接受信息以后,根据电 脑设定好的程序进行相应判断,还有就是声音采纳器,现在多用在儿童玩具中,可以 对话。此外还有就是扫描仪,点读笔和点读机就用了这些技术,机器人的话更为先进, 它运用到了以上所有的技术并加以进化。