自控课程设计题目
自动控制原理课程设计题目-V1
自动控制原理课程设计题目-V1正文:自动控制原理一直是工科专业中非常重要的一门课程,通过学习这门课程,不仅能够熟悉自动控制的基本原理和方法,还能提高学生的实际应用能力。
在课程的学习过程中,课程设计是一个非常重要的部分,设计一个好的课程题目能够加深学生对知识的理解和应用,同时也可以提升学生的创新能力和实际解决问题的能力。
一、基于微处理器的PID控制器设计这个题目要求学生在掌握PID控制原理的基础上,进一步了解微处理器的工作原理和控制方法,在此基础上设计一个能够实现PID控制的微处理器控制器。
此项目对学生的电子电路设计能力和编程能力提出了很高的要求,但是通过这个项目学生能够更深入的了解PID控制的本质,并在实际中掌握使用微处理器控制PID控制器的方法。
二、基于遗传算法的控制器优化设计在自动控制中,常常需要对控制器的参数进行优化,以达到更好的控制效果。
如果使用传统的方法进行控制器参数的优化,往往需要大量的试验和计算,而且效果未必能够达到最优。
因此,这个题目要求学生使用遗传算法对控制器进行优化设计,在此基础上实现一个自适应控制器。
通过这个项目的实践,学生能够更好地掌握遗传算法的基本原理和方法,并深入掌握自适应控制器的设计方法。
三、基于模糊控制的机器人路径规划机器人路径规划是机器人控制中非常关键而又常用的问题,如果能够设计一个高效且精确的机器人路径规划算法,可以大大提高机器人的工作效率。
这个题目要求学生掌握模糊控制的基本原理和方法,在此基础上设计一个能够实现机器人路径规划的模糊控制算法。
通过这个项目的实践,学生能够更好地掌握模糊控制的设计思路和方法,并提高对实际问题的解决能力。
以上三个课程设计题目都非常具有挑战性和实际意义,通过学生对这些题目的研究,不仅可以提高学生的理论水平,还能够让学生更加熟悉自动控制领域的实际应用情况。
当然,在项目的实践过程中,不可避免地会遇到一些困难和问题,但是这些问题和困难恰恰是学生实际应用能力的锻炼机会,只有在实践中不断摸索,才能更好的掌握自动控制原理的本质和实际应用。
自动控制原理课程设计题目(A)

自控类毕业设计题目
自控类毕业设计题目自控类毕业设计题目近年来,随着科技的不断发展和社会的快速变迁,自控技术在各个领域中扮演着越来越重要的角色。
自控类毕业设计题目涉及到了自动化、机械、电子、计算机等多个学科领域,具有一定的难度和挑战性。
本文将从智能家居、智能交通、工业自动化等方面来探讨自控类毕业设计题目的选取和研究。
一、智能家居智能家居是自控技术在日常生活中的应用之一,它通过传感器、执行器、网络等技术手段,实现对家庭环境的智能化控制。
在智能家居领域中,毕业设计可以选择研究如何实现家庭能源的智能管理,如通过智能电表、智能插座等设备,实现对家庭用电的监测和控制,从而达到节能减排的目的。
二、智能交通智能交通是自控技术在交通运输领域的应用,它通过传感器、通信、控制等技术手段,实现对交通流量、交通信号等的智能化管理。
在智能交通领域中,毕业设计可以选择研究如何利用智能交通系统提高交通效率和减少交通拥堵,如通过智能交通信号控制系统、智能车辆管理系统等,实现对交通流量的优化调度。
三、工业自动化工业自动化是自控技术在工业生产中的应用,它通过传感器、执行器、控制系统等技术手段,实现对生产过程的自动化控制。
在工业自动化领域中,毕业设计可以选择研究如何实现工业生产线的智能化管理,如通过自动化控制系统、机器视觉技术等,实现对生产过程的实时监测和控制,提高生产效率和产品质量。
四、智能农业智能农业是自控技术在农业领域的应用,它通过传感器、无人机、物联网等技术手段,实现对农田、农作物等的智能化管理。
在智能农业领域中,毕业设计可以选择研究如何利用自控技术提高农业生产的效益和可持续发展,如通过智能灌溉系统、智能施肥系统等,实现对农田水肥的精准控制,提高农作物的产量和品质。
总结起来,自控类毕业设计题目涉及到了智能家居、智能交通、工业自动化、智能农业等多个领域,每个领域都有其独特的技术挑战和应用前景。
在选择毕业设计题目时,可以根据个人兴趣和专业背景进行选择,并结合实际需求和市场需求,进行深入研究和探索。
自动控制原理课程设计题库
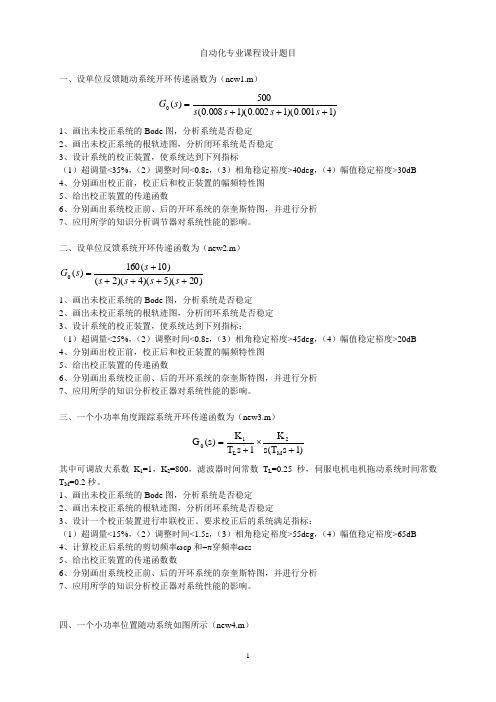
自动化专业课程设计题目一、设单位反馈随动系统开环传递函数为(new1.m ))1001.0)(1002.0)(1008.0(500)(0+++=s s s s s G1、画出未校正系统的Bode 图,分析系统是否稳定2、画出未校正系统的根轨迹图,分析闭环系统是否稳定3、设计系统的校正装置,使系统达到下列指标 (1)超调量<35%,(2)调整时间<0.8s ,(3)相角稳定裕度>40deg ,(4)幅值稳定裕度>30dB4、分别画出校正前,校正后和校正装置的幅频特性图5、给出校正装置的传递函数6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析7、应用所学的知识分析调节器对系统性能的影响。
二、设单位反馈系统开环传递函数为(new2.m ) )20)(5)(4)(2()10(160)(0+++++=s s s s s s G1、画出未校正系统的Bode 图,分析系统是否稳定2、画出未校正系统的根轨迹图,分析闭环系统是否稳定3、设计系统的校正装置,使系统达到下列指标:(1)超调量<25%,(2)调整时间<0.8s ,(3)相角稳定裕度>45deg ,(4)幅值稳定裕度>20dB 4、分别画出校正前,校正后和校正装置的幅频特性图5、给出校正装置的传递函数6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析7、应用所学的知识分析校正器对系统性能的影响。
三、一个小功率角度跟踪系统开环传递函数为(new3.m ))1s T (s K 1s T K )s (G M 2L 10+⨯+=其中可调放大系数K 1=1,K 2=800,滤波器时间常数T L =0.25秒,伺服电机电机拖动系统时间常数T M =0.2秒。
1、画出未校正系统的Bode 图,分析系统是否稳定2、画出未校正系统的根轨迹图,分析闭环系统是否稳定3、设计一个校正装置进行串联校正。
要求校正后的系统满足指标:(1)超调量<15%,(2)调整时间<1.5s ,(3)相角稳定裕度>55deg ,(4)幅值稳定裕度>65dB 4、计算校正后系统的剪切频率ωcp 和-π穿频率ωcs 5、给出校正装置的传递函数数6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析7、应用所学的知识分析校正器对系统性能的影响。
自动控制课程设计题目
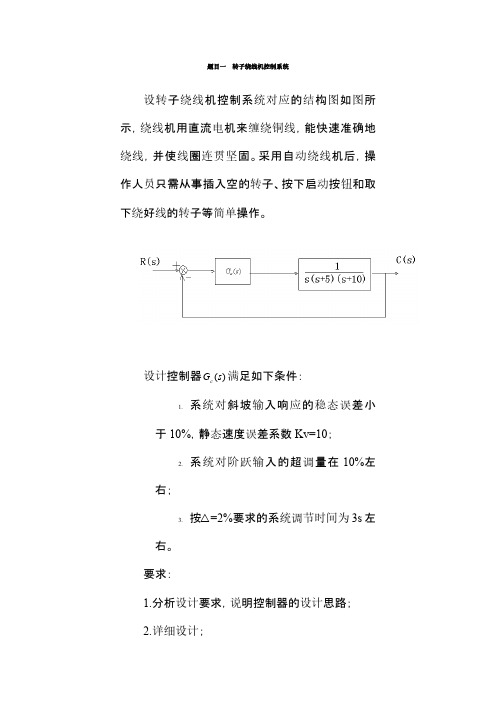
题目一转子绕线机控制系统设转子绕线机控制系统对应的结构图如图所示,绕线机用直流电机来缠绕铜线,能快速准确地绕线,并使线圈连贯坚固。
采用自动绕线机后,操作人员只需从事插入空的转子、按下启动按钮和取下绕好线的转子等简单操作。
设计控制器满足如下条件:(sG)c1.系统对斜坡输入响应的稳态误差小于10%,静态速度误差系数Kv=10;2.系统对阶跃输入的超调量在10%左右;3.按△=2%要求的系统调节时间为3s左右。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB编程输出仿真结果及图形。
题目二海底隧道钻机控制系统连接法国和英国的英吉利海峡海底隧道于1987年12月开工建设,1990年11月,从两个国家分头开钻的隧道首次对接成功。
隧道长37.82km,位于海底面以下61m. 隧道于1992年完工,共耗资14亿美元,每天能通过50辆列车,从伦敦到巴黎的火车行车时间缩短为3h.钻机在推进过程中,为了保证必要的隧道对接精度,施工中使用了一个激光导引系统,以保持钻机的直线方向。
钻机控制系统如图所示。
图中C(s)为钻机向前的实际角度,R(s)为预期角度,N(s)为负载对机器的影响。
该系统设计目的是选择增益K,使系统对输入角度的响应满足工程要求,并且使扰动引起的稳态误差较小。
要求:1.分析设计要求,说明控制器的设计思路;2.详细设计;3.用MATLAB编程输出仿真结果及图形。
题目三哈勃太空望远镜指向控制哈勃太空望远镜于1990年4月14日发射至离地球611km的太空轨道,它的发射与应用将空间技术发展推向了一个新的高度。
望远镜的2.4m镜头拥有所有镜头中最光滑的表面,其指向系统能在644km以外将视野聚集在一枚硬币上。
望远镜的偏差在1993年12月的一次太空任务中得到了大范围的校正。
哈勃太空望远镜指向系统模型经简化后的结构图如图所示设计目标是选择放大器增益Ka和具有增益调节的测速反馈系数K1,使指向系统满足如下性能:1.在阶跃指令r(t)作用下,系统输出的超调量小于或等于10%.2.在斜坡输入作用下,稳态误差较小。
自动控制原理课程设计题目(1)要点

自动控制原理课程设计题目(1)要点
1. 题目背景:介绍自动控制的概念、作用和现实应用。
2. 设计目标:明确设计的目标和要求,如稳定性、响应速度、精度等。
3. 系统模型:建立系统的数学模型,包括传感器、执行器、控制器等部分,并确定各参数。
4. 控制策略:选择合适的控制策略,如比例积分控制、模糊控制,设计控制算法,确定控制器参数。
5. 系统仿真:利用仿真软件对系统进行仿真,检验系统的控制效果和稳定性,优化控制器参数。
6. 硬件实现:根据仿真结果,选择合适的硬件设备进行实现,进行测试和调试,验证系统的稳定性和控制效果。
7. 结果分析:对实验结果进行数据分析和讨论,总结控制策略的优点和不足,提出改进措施。
8. 实验报告:撰写实验报告,包括设计思路、仿真结果、实验步骤、实验数据和分析、结论等部分。
自动控制课程设计题目

自动控制原理课程设计题目(08050541X )一、单位负反馈随动系统的开环传递函数为(ksm1))1s 001.0)(1s .1.0(s K )s (G 0++= 1、画出未校正系统的Bode 图,分析系统是否稳定2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的校正装置,使系统达到下列指标(1)在单位斜坡信号作用下,系统的稳态误差≤0.001(2)超调量Mp<30%,调节时间Ts<0.05秒。
(3)相角稳定裕度在Pm >45°, 幅值定裕度Gm>20。
4、分别画出校正前,校正后和校正装置的幅频特性图。
5、给出校正装置的传递函数。
计算校正后系统的剪切频率Wcp 和-π穿频率Wcg 。
6、分别画出系统校正前、后的开环系统的奈奎斯特图,并进行分析。
7、在SIMULINK 中建立系统的仿真模型,在前向通道中分别接入饱和非线性环节和回环非线性环节,观察分析非线性环节对系统性能的影响。
8、应用所学的知识分析校正器对系统性能的影响(自由发挥)。
二、设单位反馈随动系统固有部分的传递函数为(ksm2))20s )(5s )(4s (s )10s (160)s (G 0++++= 1、画出未校正系统的Bode 图,分析系统是否稳定。
2、画出未校正系统的根轨迹图,分析闭环系统是否稳定。
3、设计系统的校正装置,使系统达到下列指标:(1)在单位斜坡信号作用下,系统的稳态误差系数Kv=500(2)超调量Mp<55%,调节时间Ts<0.5秒。
(3)相角稳定裕度在Pm >20°, 幅值定裕度Gm>30。
4、分别画出校正前,校正后和校正装置的幅频特性图。
5、给出校正装置的传递函数。
计算校正后系统的剪切频率Wcp 和-π穿频率Wcg 。
7、在SIMULINK 中建立系统的仿真模型,在前向通道中分别接入饱和非线性环节和回环非线性环节,观察分析非线性环节对系统性能的影响。
2012春自动控制系统课设题目
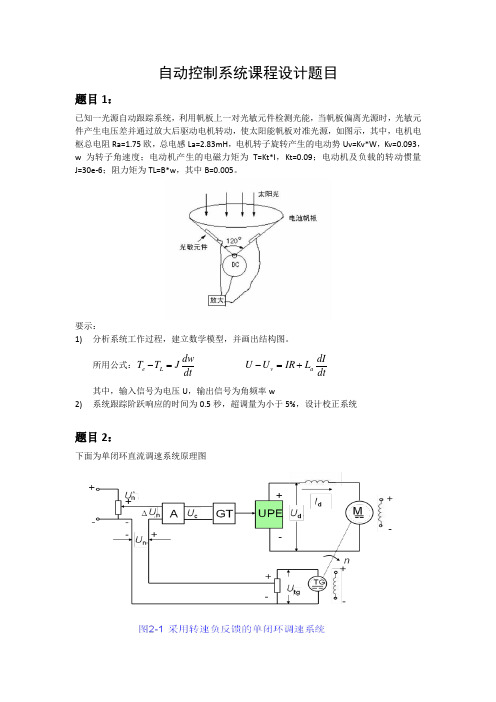
自动控制系统课程设计题目题目1:已知一光源自动跟踪系统,利用帆板上一对光敏元件检测光能,当帆板偏离光源时,光敏元件产生电压差并通过放大后驱动电机转动,使太阳能帆板对准光源,如图示,其中,电机电枢总电阻Ra=1.75欧,总电感La=2.83mH ,电机转子旋转产生的电动势Uv=Kv*W ,Kv=0.093,w 为转子角速度;电动机产生的电磁力矩为T=Kt*I ,Kt=0.09;电动机及负载的转动惯量J=30e-6;阻力矩为TL=B*w ,其中B=0.005。
要示:1) 分析系统工作过程,建立数学模型,并画出结构图。
所用公式:dt dw JT T L e =-dt dIL IR U U av +=- 其中,输入信号为电压U ,输出信号为角频率w2) 系统跟踪阶跃响应的时间为0.5秒,超调量为小于5%,设计校正系统题目2:下面为单闭环直流调速系统原理图其中,A 为放大器,GT 为触发装置,UPE 为晶闸管三相桥式整流装置,M 为被控的直流电动机,TG 为测速发电机,Un*为给定电压信号,Un 为反馈信号,Uc 为控制信号,Ud 为电动机电枢电压,Id 为电枢电流,n 为电动机转速。
已知,放大器A 的放大倍数是Ka=21,GT 和UPE 总的传递函数为10167.044)(1+=s s G ,电动机的传递函数为1075.0001275.019.5)(22++=s s s G ,反馈环节可看做一个比例环节,比例系数为Ktg=0.02。
要求:设计调节器,使得系统稳定,并有足够好的动态性能,超调量小于20%,调节时间小于1s 。
题目3:磁盘驱动器必须保证磁头的精确位置,并减小参数变化和外部振动对磁头定位造成的影响。
作用于磁盘驱动器的扰动包括物理振动、磁盘转轴轴承的磨损和摆动,以及元器件老化引起的参数变化等。
下图为磁盘驱动器示意图和磁头控制系统框图:已知被控制对象(电机和驱动臂)的传递函数为)1000)(20(5000)(++=s s s s G ,传感器传递函数H(s)=1。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《自动控制原理》课程设计报告
班级
姓名
学号
年月日
1、设单位反馈系统的开环传递函数为0()(1)
K
G s s s =
+
试设计一串联校正装置,使系统满足如下指标:(1)在单位斜坡输入下的稳态误差115ss e <;(2)截止频率c 7.5ω≥ (1/s);(3)相角裕度γ≥45°。
2、设单位反馈系统的开环传递函数为0()(1)(0.251)
K
G s s s s =
++
要求校正后系统的静态速度误差系数Kv ≥5(1/s),相角裕度γ≥45°,试设计串联校正装置。
3、设单位反馈系统的开环传递函数为040
()(10.2)(10.0625)
G s s s s =
++
若要求校正后系统的相角裕度为30°,幅值裕度为10~12(dB),试设计串联校正装置。
4、控制系统如图所示:
若要求校正后系统得静态速度误差系数等于301s -,相角裕度不低于40 ,幅值裕度不小于10dB ,截止频率不小于2.3(rad/s),试设计串联校正装置。
5、控制系统如图所示:
若要求系统在单位斜坡输入信号作用时,位置输出稳态误差0.1ss e <,开环截止频率 4.4/c rad s ω≥,相角裕度45γ≥ ,幅值裕度10GM dB ≥,试设计校正装置。
6、设单位反馈系统的开环传递函数为0()(1)(0.1251)
K
G s s s s =
++
要求校正后系统:Kv =20(1/s),γ≥50°,4s t s ≤,试设计串联校正装置。
7、设单位反馈控制系统的开环传递函数为0()(1)(0.21)
K
G s s s s =
++,
试设计一串联校正装置,使系统满足如下性能指标:静态速度误差系数8v K =,相角裕度40γ≥ 。
8、设单位反馈控制系统的开环传递函数为02()(10.2)
K
G s s s =
+,
试设计一串联校正装置()c G s ,使系统的静态加速度误差系数10a K =,相角裕度
35γ≥ 。
9、设单位反馈系统的开环传递函数为0()(1)(0.251)
K
G s s s s =
++
要求校正后系统:Kv ≥5(rad/s),相角裕度γ≥45°,截止频率c 2ω≥,试设计串联校正装置。
10、设单位反馈控制系统的开环传递函数为07
()(0.51)(0.1671)
G s s s s =
++,
试设计一串接校正装置,使校正后系统的相角裕度为402± ,幅值裕度不低于10dB ,开环增益保持不变,截止频率不低于1。
11、设单位反馈系统的开环传递函数为040
()(0.21)(0.06251)G s s s s =++
若要求校正后系统的相角裕度为50°,幅值裕度为30~40(dB),试设计串联校正装置。
12、设单位反馈系统的开环传递函数为0()(0.21)(0.51)
K
G s s s s =++
若要求校正后系统:Kv =20(rad/s),相角裕度不低于35°,幅值裕度不低于10(dB),试设计串联校正装置。
课程设计要求:
1、以教师总结归纳出的有实际背景的数学模型为基础,对各个小组位同学提出不同的设计题目及设计指标要求。
学生通过查阅相关资料,根据各自题目确定合理的控制方式及校正形式,完成设计;
2、学生首先要根据所学控制理论知识进行人工设计校正装置,初步设计出校正装置传递函数形式及参数;
3、在MATLAB下进行动态仿真,在计算机上对人工设计系统进行仿真调试,使其满足技术要求;
4)确定校正装置的电路形式及电路参数;
5)完成设计报告。