第七章 虚拟内窥镜
交互式虚拟人脑内窥镜系统关键技术
虚拟 内窥镜 技 术是 随着 计 算 机技 术 、 图形 学 和 虚拟 现实 技 术 的发 展 而 逐 步 形 成 的一 种 独 特 的技
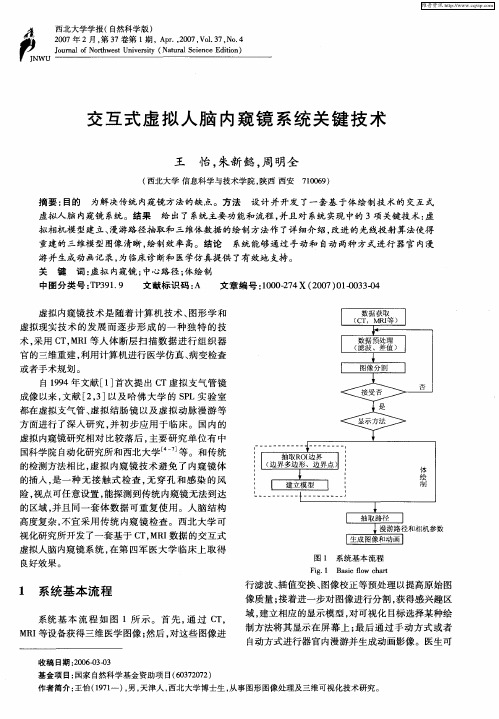
Fi.1 Ba i o c a t g sc f w h r l
1 系统 基 本 流 程
系 统 基 本 流 程 如 图 1所 示 。 首 先 , 过 C , 通 T
行滤 波 、 值变 换 、 插 图像校 正等 预处理 以提高原始 图 像质 量 ; 接着 进一 步对 图像进行 分 割 , 得感兴 趣 区 获
路径 抽 取 实 际上 就是 获 得器 官 的骨架 , 见 的 常 三 维抽骨 架 主要 有 3类方法 : 工指定 、 人 基于 拓扑结 构 细化 和距离 变换 。
模 型 、 择漫 游路径 、 选 确定 体数 据绘制 方法是 实现 虚
拟 人脑 内窥镜 的 3项 关键 技术 。 2 1 定 义像 机模型 .
方 面进行 了深入 研 究 , 初 步 应用 于 临床 。 国 内 的 并 虚拟 内窥镜 研究 相对 比较 落 后 , 要研 究 单 位 有 中 主 国科学 院 自动化研 究所 和西北 大 学 一 等 。和传 统 ¨
的检测 方法 相 比 , 拟 内窥 镜 技 术 避免 了 内窥 镜体 虚 的插入 , 一 种无 接 触 式 检 查 , 穿 孔 和 感 染 的 风 是 无 险 , 点 可任意设 置 , 视 能探测 到传 统 内窥 镜无 法 到达
中它 “ 看到 ” 的景像 显示 在 屏幕 上 。 因此 , 建立 像 机
一种鼻内窥镜虚拟手术仿真系统
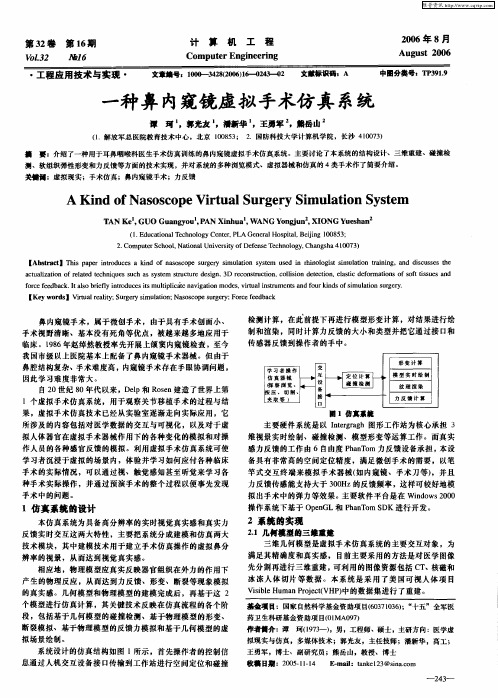
l 耍 :介绍了一种用于耳鼻咽喉科医生手术仿 真训练的鼻内窥镜虚拟手术仿真系统。主 要讨论了本系统的结构设计、三维重建、碰撞检
测、软组织弹性形变和力反馈等方面 的技术实现 ,并对系统 的多种浏览模 式、虚 拟器械 和仿真 的 4类手术作了简要介绍 。 关t冀 :虚拟现实 ;手术仿真 ;鼻 内窥镜手术 ;力反馈
— —
我 国市级以上医院基本上配备 了鼻内窥镜手术器械 。但 由于 鼻腔结构复杂 、手术难 度高 ,内窥镜手术存在手眼协调问题 ,
因此学 习难 度非常 大。 自2 0世纪 8 年代 以来 ,D l R sn建造 了世界上第 0 ep和 oe 1个虚拟手术仿 真系统,用于观察 关节移植手术 的过程与结
(. d ct nl e hoo yC ne, L G n r si lBe ig10 5 ; 1E u ao a c n lg e trP A e ea Hopt , in 0 8 3 i T l a j
2 Co ue c o lNa o a Un v ri f f n e e h oo y C a g h 0 3 . mp tr h o , t n l ie s yo e s c n lg , h n s a 1 7 ) S i t De T 40
A n fNa o c p ru l u g r i u a i n S se Ki d 0 s s o eVit a r e yS m l to y tm S
T AN ’ GUO a g o lP Ke , Gu n y u , AN n ua , WANGY n jn , ONGY eh n Xi h ’ o gu XI u s a
一
文章■号I o 48 o6 矗_ 4 _ 2 文■ o 1 2( 0) _ 23_ 2 H1 o _0 标识码lA
虚拟内窥镜的路径规划算法研究
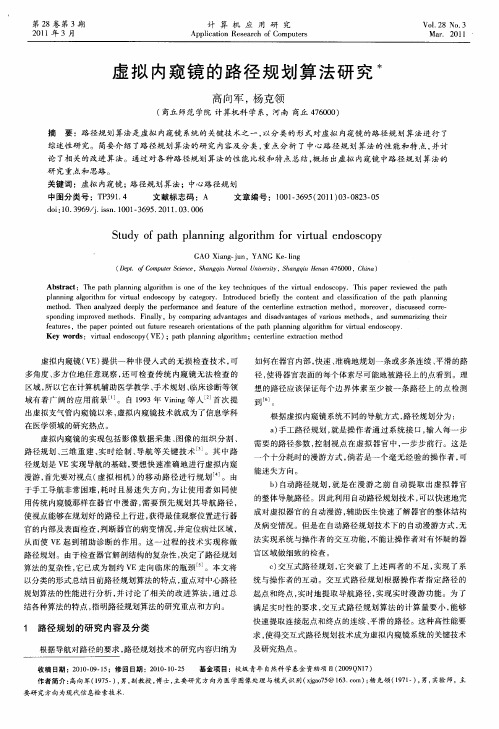
如 何 在 器 官 内部 , 速 、 快 准确 地 规 划 一 条 或 多 条 连 续 、 滑 的 路 平 径 , 得 器 官表 面 的每 个 体 素 尽 可 能地 被 路 径 上 的点 看 到 。理 使
想 的路径应该保证每个边管内窥镜以来 , 虚拟 内窥镜技术就成为 了信息学科
第2 8卷 第 3期
21 0 1年 3月
计 算 机 应 用 研 究
App iat Re e r h o m p e s lc i on s a c fCo utr
Vo . 8 No 3 12 .
Ma. 2 l F 0l
虚 拟 内窥 镜 的路 径 规 划算 法研 究
高 向军 , 杨克领
在 医学 领 域 的 研 究 热 点 。 虚 拟 内窥镜 的 实 现包 括 影 像 数 据 采 集 、 像 的组 织 分 割 、 图
根 据 虚 拟 内窥 镜 系统 不 同 的导 航 方 式 , 径 规 划 分 为 : 路 a 手 工 路 径 规 划 , 是 操 作 者 通 过 系 统 接 口 , 入 每 一 步 ) 就 输 需 要 的路 径 参 数 , 制 视 点 在 虚 拟 器 官 中 , 步 步 前 行 。这 是 控 一
Ke o d :v t l n oc p ( E ; a l nn lo t yw r s iu d so y V ) p t p n i agr h c n r n x a t nm to ra e h a g i m; e t l e t ci e d ei er o h
虚拟 内窥 镜 ( E) 供 一 种 非 侵 入 式 的无 损 检 查 技 术 , V 提 可 多 角 度 、 方 位地 任 意 观 察 , 可 检 查 传 统 内窥 镜 无 法 检 查 的 多 还 区域 , 以 它 在计 算 机 辅 助 医学 教 学 、 术 规 划 、 所 手 临床 诊 断 等 领 域有 着 广 阔 的 应 用 前 景 J 自 19 。 9 3年 Vnn 人 首 次 提 i g等 i
3d内窥镜原理
3d内窥镜原理3D内窥镜原理引言:随着科技的不断发展,医疗行业也在不断创新和进步。
其中,3D内窥镜技术的应用,为医生和患者带来了诸多便利。
本文将着重介绍3D内窥镜的原理及其在医疗领域中的应用。
一、3D内窥镜的基本原理1. 光学原理:3D内窥镜是一种通过光学系统来观察人体内部病变情况的医疗设备。
它通过在光学系统中引入两个相机,实现对人体内部图像的立体观察。
其中一个相机用于捕捉左眼视角的图像,另一个相机用于捕捉右眼视角的图像。
通过将这两个图像进行合成,就能够得到一个立体的视觉效果。
2. 立体成像原理:在3D内窥镜中,光线经过光学系统进入人体内部,并通过图像传感器将图像转化为电信号。
然后,经过信号处理和计算,将左右眼的图像进行合成,并通过显示屏或眼镜等设备呈现给医生进行观察。
通过这种方式,医生可以观察到更为真实、清晰的立体图像,提高了手术的精确性和安全性。
二、3D内窥镜的应用1. 腹腔镜手术:腹腔镜手术是一种常见的微创手术技术,通过在腹部插入3D内窥镜和其他手术工具,医生可以准确观察和处理腹腔内的病变。
相比传统的开放手术,腹腔镜手术具有创伤小、恢复快等优势。
而3D 内窥镜的应用,则进一步提高了手术的精确性和安全性。
2. 智能导航系统:在神经外科手术中,3D内窥镜的应用也非常广泛。
医生通过3D内窥镜观察病变的位置和大小,并利用智能导航系统进行手术规划和操作。
这种方式可以减少手术的风险和创伤,提高手术的成功率。
3. 心脏手术:在心脏手术中,3D内窥镜同样发挥着重要的作用。
通过3D内窥镜,医生可以观察心脏内部的血管和病变,并进行精确的手术操作。
这种技术的应用,大大提高了心脏手术的效果和成功率。
三、3D内窥镜的优势和挑战1. 优势:使用3D内窥镜进行观察和手术操作,可以提供更为真实、清晰的立体图像,使医生能够更准确地判断和处理病变。
同时,3D内窥镜具有微创、恢复快等优势,可以减少手术的创伤和并发症。
2. 挑战:虽然3D内窥镜技术在医疗领域中得到了广泛应用,但仍然存在一些挑战。
虚拟现实技术在神经外科临床教学中的应用
操作 , 这已基本达 到神经外科 虚拟仿 真器 的要 求 J 。有 V R 系统整合 了立体视觉 、 力反馈 、 头手追踪 系统和立体音 响; 其
应 用 界 面可 显 示 图 形 、 力反馈 、 三 维 声 响 反 馈 。 已 报 道 脑 血
定越发严格 , 在神经外科 临床 工作 中, 主要 由上级 医生来 完 成复杂和高难度 的手术 , 而一些 常规手 术也是在高技术设 备 的辅助下完成 , 下级医生操作机会 较以往 明显减少 。学生及
效 。当前 V R系统可整合 M R 以及 M R A、 MR V、 D T I 等信息 ,
使 操 作 者完 全 沉 浸 在 虚 拟 环境 中 , 进 行 有 触 觉 和视 觉互 动 的
疗体制 和法律法规不断完善 以及医学教育规模 不断扩大 , 临
床 可供 临床 教 学 的 资 源 日益 短 缺 。 由 于 手 术 资 质 管 理 等 规
随着 社 会 经 济 发 展 , 人们对 医学愈加 重视 , 对 医 务 人 员
将其应用于外科 手术技能培训 。V R是由计算机生成 的模拟 系统 , 特点在于计算机 产生人 为虚拟 环境 , 通过计算 机构成 数字三维模型 , 并在计 算机 中生成 以视觉感受 为 主, 包括 听 觉、 触觉 的综合可感 知人工 环境 , 人可参 与其 中并 与之发 生 “ 交互 ” 作用, 产生互动 。该技术 可模拟一些 高风 险的 、 高技 术要求操作环境 ( 如 飞机驾驶 、 外 科手术 等) , 让 使用者在模 拟情况下熟悉相关操 作及程序 , 既避免 了危 险及 可能危害 , 又可培养专 门操作技能。 作为新 的医学教学方 法 , V R让操作 者在虚 拟情况下 完 成手术操作 , 既不会 损害患 者 , 又 可帮助操 作者 积累基本 手 术经验及提高熟练程 度。该技术 近年在 国外得 到较大发 展 应用 , 目前已应用微 创外科 、 内镜 手术 以及血管 内介入 治疗
NeuViz16排螺旋CT增强、CTA延迟时间优化的研究
影像技术影像研究与医学应用 2019年2月 第3卷第4期能情况。
CT灌注成像具有操作简单、计算便利、绘制器官血流灌注动态曲线、显示解剖细节、显示灌注定量信息、判断弥漫性病变程度、发现早期肿瘤性病变等特征,优化后的图像重建,能够获取类似灌注参数图像,被广泛应用于活体组织血流动力学的探究。
其临床应用,主要在肿瘤学、腹部与脑部病变研究方面,可诊断出急性脑缺血、颅内占位性病变,以及肝脏、胰腺、肾脏的病变。
在肿瘤病变诊断中的应用,可根据肿瘤新生血管情况,评估肿瘤转移、生长等趋势,也是良恶性肿瘤,以及肿瘤程度、分期、分级的重要指标。
控制好射线辐射、造影剂副作用,可有效获得痴呆、精神疾病等诊断信息。
随着该技术的不断发展,灌注软件的不断优化,CT关注测量结果的精确度会得到进一步提升,形态、功能的同时反映也会成为可能。
2.3 虚拟内窥镜虚拟内窥镜技术,实现了虚拟现实技术,在现代医学中的高效利用。
其涉及计算机图形学、图像处理,以及医学领域相关知识。
规避了光学内窥镜侵入性操作问题,属于无接触式检查技术。
虚拟内窥镜的临床应用,主要是借助二维医学影像参数,直接重建血管、呼吸道、胃肠道等器官的三维实体模型,在虚拟三维内空腔组织中,展开漫游观察。
也可以利用交互方式,在器官结构内,展开成像检查。
人体组织器官特征、空间定位关系的清晰显示,能够为医生诊疗提供价值依据。
其应用主要在心脏、结肠、支气管、内耳等空腔结构器官上,与以往的光学内窥镜比较,具有非侵入性、低危害性、可重复性、可贯穿性、操控灵活等优势,可实现对胸动脉、大脑的内窥。
结合体绘制、面绘制技术,可强化器官组织漫游交互功能,以及动画回放。
虚拟内窥镜凭借自身无创、安全等优势特征,借助调节透明度、颜色的功能,能够清晰观察到器官内外状况,可为穿刺、手术等操作,提供更加精准的解剖信息。
弥补了常规内窥镜的各种不足,在某种情况下,可完全取代传统内窥镜。
同时在狭小空间范围内的有效内窥,也是传统内窥镜所不能比拟的。
《医影像学课件:虚拟内镜技术》
呼吸道疾病诊断
虚拟内镜技术可以用于检查呼吸道疾病,如支 气管炎、肺部肿瘤等,非侵入性且简便快捷。
虚拟内镜技术的优势和挑战
1 优势
相较于传统内镜技术,虚拟内镜技术无需侵入患者体内,避免了痛苦 和不适感,同时提供更清晰的图像和更安全的检查方法。
2 挑战
虚拟内镜技术面临着计算机处理速度、数据存储和隐私保护等方面的 挑战,需要不断发展和改进。
胃镜
虚拟胃镜可以检查胃部病变,如溃疡、炎症和肿瘤, 无需进行传统胃镜检查。
结肠镜
虚拟结肠镜可以检查结肠疾病,如息肉、息肉性腺 瘤和癌症。
虚拟内镜技术在呼吸道疾病诊断中的应用
支气管镜
虚拟支气管镜可以检查支气管疾病,如支气管炎、 肺部感染和肿瘤。
肺部检查
虚拟肺部检查可以评估肺部结构和功能,帮助发现 肺部疾病,如肺气肿、肺不张和肺癌。
虚拟内镜技术的定义和原理
定义
虚拟内镜技术是一种利用计算机生成的虚拟内镜设 备,通过实时图像渲染和处理,提供与真实内镜类 似的视角和体验。
原理
虚拟内镜技术基于医学影像数据,如CT或MRI扫描 结果,计算机通过图像处理、三维重建和可视化技 术,生成可操作的虚拟内镜环境。
如何使用虚拟内镜技术进行医学诊断
1
扫描和数据获取
医生使用计算机断层扫描(CT)或磁共
图像重建和处理
2
振成像(MRI)等技术获取患者的影像数 据。
计算机通过图像重建和处理算法将2D影
像转换为3D模型,并优化图像质量。
3
虚拟内镜操作和诊断
医生使用虚拟内镜设备进行操作、探查 和诊断,根据观察结果制定治疗方案。
虚拟内镜技术在消化道疾病诊断中的应用
《医影像学课件:虚拟内 镜技术》
影像学技能培训(CT)ppt
操作注意事项还包括对异常情况的应急处理,如设备故障、患者突发状况等,学员 需要具备一定的应急处理能力,确保患者安全和影像学结果的可靠性。
06
进阶技能
高级图像后处理技术
3D重建技术
通过CT扫描数据,利用高级图像后处理技术进行3D重建,以更直 观的方式展示病变部位的结构和形态。
血管成像技术
利用CT图像后处理技术,对血管进行重建和可视化,用于诊断血 管病变和评估血管狭窄程度。
虚拟内窥镜技术
通过图像后处理技术,模拟内窥镜的观察效果,对胃肠道、呼吸道 等内部结构进行检查。
疾病诊断进阶课程
肿瘤诊断
01
深入了解肿瘤的影像学特征,提高对肿瘤的早期发现和诊断准
确性。
心血管疾病诊断
02
泌尿系统结石
掌握泌尿系统结石的CT影像表现, 以便及时确诊并制定治疗方案。
疾病诊断流程
影像学检查
根据患者病情选择合适的影像学 检查方法,如CT平扫、增强扫描 等。
诊断报告
根据分析结果,书写准确、规范 的诊断报告,为临床医生提供可 靠的参考依据。
01
02
患者信息收集
详细了解患者病史、症状、体征 等,为影像学诊断提供线索。
病例难度
病例难度应适中,既不过于简单也不 过于复杂,以利于学员逐步提高分析 能力。
病例分析方法
观察影像学表现
学员应仔细观察影像学资料,了 解病变的位置、形态、密度或信
号等特征。
鉴别诊断
学员应结合所学知识,列出可能 的鉴别诊断,以提高诊断准确性
。
诊断依据
学员应明确指出支持诊断的依据 ,以及排除其他疾病的原因。
三维人体虚拟内镜的发展和应用研究
内腔 结 构视 图 。 用 者 可 以沿 这 个虚 拟 的 内部 空 腔做 使
飞行 观 察 , 拟 传 统 的 内窥 镜检 查 过 程 , 看 到 的景 模 所 象 就 像 用视 频 内窥 镜 ( t d s o ea d Vie Op i En o c p n d o c En o c p )观 察 到 的一 样 ,甚 至还 可 以显 示 解 剖结 d so e 构 的三 维外 观 图像 以及 各 个方 位 的 CT 和 MRI 片 切 图像 。 虚拟 内窥镜 用 虚 拟 现实 系统来 实 现 , 医生 通 过头
数字 手 套或 六 鼠标 操 纵 观察 方 向 , 还提 供 了光 学 系统
所 不 具 备 的如 视像 、 角 、 换 、 视 转 光线 、 量 的观 察 、 测 控 制 和选择 功 能 , 视 觉 反馈 定 位 和 导航 系统 确 定操 作 其 者相ห้องสมุดไป่ตู้对 于 实 际解 剖结 构 的距 离 和 方 向。例 如 , 学 内 光 窥镜 只能 在腔 内观察 内腔 表皮 组 织 的病 变 情况 , 虚 而 拟 内窥 镜 可 以深 入 表皮 组 织 内部 进 行 观察 。 医生 通 过
维普资讯
压疗设 台信 垂
三 维 人 体 虚 拟 内镜 的 发 展 和 应 用 研 究
叶 建 江
( 江省 中 医院 设 备 科 , 江 杭 州 3 0 0 ) 浙 浙 1 0 6
【 要】 摘 虚拟 内窥 镜作为一种非 侵入性诊断方法 , 在临床 上具有广泛 的应用前 景 , 本文 对虚拟 内窥镜 系统进行 了分析 , 讨论 了 虚拟摄像 机的空间定位 问题以及虚拟 现实的实现方法 。说明 了其主要 的应用 范围 。最后 , 展望该领 域发展的前景 。 【 关键词 】 虚拟内窥镜 ; 虚拟摄像机 ; 虚拟 现实 【 中图分类号 】 TH7 6 1 7 . 【 文献标识 码 】 A 【 文章编号 】0 7—7 1 (0 2 0 10 50 2 0 )6—0 4 —0 08 3
虚拟医学手术仿真技术概述
虚拟医学手术仿真技术概述潘新华;谭珂【摘要】Virtual surgery simulation is an important application of virtual reality technology in medical field. This paper discusses the research characteristics, actuality and development direction of virtual surgery simulation. It also analyzes die advantages and shortages in domestic research and puts forward research area in the future.%虚拟医学手术仿真是虚拟现实技术在医学上的一个重要应用.该文较为全面地介绍了虚拟外科手术仿真的研究特点、现状及其发展趋势,分析了国内研究的优势与不足,提出了未来需重视的研究领域.【期刊名称】《中国医学教育技术》【年(卷),期】2011(025)004【总页数】4页(P352-355)【关键词】虚拟现实;虚拟手术;仿真【作者】潘新华;谭珂【作者单位】中国人民解放军总医院教育技术中心,北京100853;中国人民解放军总医院教育技术中心,北京100853【正文语种】中文【中图分类】G4341 虚拟医学手术仿真技术的特点和前沿研究领域1.1 虚拟医学手术仿真技术的特点虚拟医学手术仿真技术综合了医学、计算机图形学、生物力学、机器人技术、实时分布系统、人机交互、心理学、控制学、电子学和多媒体技术等相关领域的理论和技术[1]。
它针对医学数据建立逼真的视、听、触觉一体化的仿真环境,通过必要的交互设备,实现对于虚拟人体器官在虚拟手术器械作用下各种变化的模拟和对操作人员各种感官反馈(如视觉反馈和力反馈等)的模拟,以自然的方式与仿真环境中的对象进行交互操作,获得身临其境的感受和体验。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
虚拟内窥镜技术(Virtual Endoscopy)是虚拟 现实技术在现代医学中的应用。它利用医学影像作 为原始数据,融合图像处理、计算机图形学、科学 计算可视化、虚拟现实技术,模拟传统光学内窥镜 的一种技术。它克服了传统光学内窥镜需把内窥镜 插入人体内的缺点,是一种完全无接触式的检查方 法。虚拟内窥镜的研究旨在为医生提供诊断依据, 还可应用于辅助诊断、手术规划、实现手术的精确 定位和医务人员的培训等。
内窥镜及虚拟内窥镜的发展
• 硬式内镜阶段(1806~1932):硬式内镜由德国 人Philipp Bozzini 首创,由一花瓶状光源、蜡烛 和一系列镜片组成,主要用于膀胱和尿道检查。 1895 年Rosenhein 研制的硬式内镜由3 根管子呈 同心圆状设置,中心管为光学结构,第二层管腔 内装上铂丝圈制的灯泡和水冷结构,外层壁上刻 有刻度反应进镜深度。1911 年Elsner 对senhein 式胃窥镜作了改进,在前端加上橡皮头做引导之 用,但透镜脏污后便无法观察成为主要缺陷,尽 管如此,Elsner 式胃镜1932 年以前仍处于统帅地 位。
7——处理过程 虚拟内窥镜系统的处理过程 数据采集、图像的组织分割、三维重建、 路径规划、实时绘制
数据采集
• 由CT 或MRI 等设备采集2D 的医学切片图像,经3D 重建后的图 像质量主要取决于数据采集的方式和分辨率,分辨率又由切层厚 度和矩阵大小决定。气管、支气管、胃、肠系统的检查首选螺旋 CT,可以缩短采集时间,从而减少由于病人呼吸和移动造成的 伪影,还可以在不增加曝光时间的情况下提供重叠的图像资料。 3D 重建要求层间的数据集具有连贯性,操作者可以改变图像重 叠的程度,以获得较好的3D 图像效果。原始的图像分辨率越高, 重建的3D 图像效果越好。螺旋CT 虚拟内窥镜的最佳扫描参数目 前还无定论,但最小的电子束流准直可获得最大的X 线分辨率, 最慢的检查床推进速度和重建片层最大程度的重叠可进一步提高 图像的清晰度。另外,增加千伏电压数和毫安数可以增加信噪比, 但同时也会增加患者的辐射剂量,因此需要综合外科手术对清晰 度的要求,选择最合适的扫描参数。在神经系统内窥镜研究中一 般选择MRI。因为头部较固定,可以较长时间的采集数据,得到 高分辨率的图像。在过去的十几年中MR 技术有了很大发展,成 像序列方法、磁场强度和梯度线圈工艺得到了改进,使得MRI 可 以在短时间内采集到高清晰度的图像。目前还处于实验阶段的高 磁场MRI 所产生的图像具有惊人的高清晰度,为虚拟内窥镜的发 展和应用奠定了基础。
图像的组织分割
• 由于实际的医学图像数据集CT、MRI 等提供的断 层切片图像除了包含特定组织外,还包含了其它 的信息,必须将特定的组织、器官分割出来才能 实现3D 重建。分割是指区分相邻组织结构特征的 过程。目前主要使用手工、半自动、自动分割三 种方法。由于医学图像的复杂性,完全自动并精 确地实现组织的分割是非常困难的,而手工分割 的工作量太大,因此使用医学知识并结合快速精 确的技术半自动地实现组织分割是比较现实的, 也是目前常用的方法。发展自动分割技术是发展 虚拟内窥镜技术的关键。
组 织 分 割 前 图 像
组 织 分 割 后 的 图 像
三维重建
• 三维重建是将2D 的切片数据集重新构造成3D 实 体的过程。虚拟内窥镜系统的3D 重建有表面重建 和体重建两种方法.表面重建是由切片数据集提供 的数据中抽取出等值面,由点、线、构造出对象 的几何表面,然后再由传统的图形学技术实现表 面绘制。通过抽取等值面构造的表面模型,会丢 失三维数据场中的细节信息,有些分界面也有可 能被扩大,也就是说保真性较差。因此,虽然通 过表面模型可以有效的绘制三维体的表面,但缺 乏内部信息的表达。
• • • • •
半屈式内镜阶段(1932~1957):Schindler 从1928 年 与优秀的器械制作师Georg Wolf 合作研制胃镜, 最终在 1932 年获得成功, 定名为Wolf-Schinder 式胃镜。之后, 许多人对其进行了改造,使之功能更为齐全,更为实用。 光导纤维内镜阶段(1957 年至今):1954 年,英国的 Hopkins 和Kapany发明了光导纤维技术。1957 年, Hirschowitz 及助手在美国胃镜学会上展示了自行研制的 光导纤维内镜。60 年代初,日本Olympas 厂在光导纤维 胃镜基础上,加装了活检装置及照相机,有效地显示了 胃照相术。1966 年Olympas厂首创前端弯角机构,1967 年Machida 厂采用外部冷光源,使光量度大增,可发现 小病灶,视野进一步扩大,可以观察到十二指肠。近10 年随着附属装置的不断改进,如手术器械、摄影系统的 发展,使纤维内镜不但可用于诊断,且可用于手术治疗。
体积重建实际上不通过构造中间对象,直接由 3D 数据本身重现实体。3D数据中的一个数据作为 一个表示实体的基本单元-体素,每一个体素都有 颜色、不透明度、梯度等相应的属性。首先根据数 据点值对每一体素赋以不透明度(α)和颜色值(R、 G、B);再根据各体素点所在点的梯度以及光照 模型计算出各数据点的光照强度;然后根据体光照 模型,将投射到图像平面中同一个象素点的各体素 的半透明度和颜色值从前向后或者从后向前组合在 一起,形成最终的结果图像。根据不同的绘制次序, 体绘制方法目前主要分为两类:以图像空间为序的 体绘制算法(光线投射法)以对象空间为序的体绘 制算法(单元投影法)。
视频内镜时代(1983 年以后):1983 年Welch Allyn 公 司研制成功了电子摄像式内镜。该镜前端装有高敏感度微 型摄像机,将所记录下的图像以电讯号方式传至电视信息 处理系统,然后把信号转变成为电视显像机上可看到的图 像。 意大利科学家近日研制出一种机器人内窥镜,能够像绦 虫一样蠕动,用来进行结肠内部检查。新发明的这个机器 人叫“埃米尔”,可以像尺蠖一样缩短和伸展地移动。 “埃米尔”身上装有一个微型摄像机和小发光二极管,用 来寻找是否有癌细胞。它由计算机控制,身上有导线与微 机相连。 目前内窥镜技术不仅可以用于诊断还可用于手术,避 免了病人手术时许多不必要的痛苦,内窥镜技术在现代医 学中占有重要地位。尽管如此,内窥镜技术在实施时无一 例外地要往病人体内插入内窥镜体,这无疑会给病人带来 许多痛苦和不适,并且可能会带来较多不良后果,如出血、 穿孔、感染等等,个别敏感体质的人甚至因身体的不适而 无法进行检查。
虚拟内窥镜系统的硬件组成
• • • • 总体上说,虚拟内窥镜系统的硬件组成主要有输入设备、主计算机、显示设备三部分 组成。1.扫描设备 扫描设备为主计算机提供高分辨率的医学图像原始数据,通常为计算断层造影(CT)、 磁共振成像(MRI)、磁共振血管造影(MRA)、超声波成像(US)、正电子发射计算断层造 影(PET)、单光子发射计算断层造影(SPECT)等设备。 2.输入设备 输入设备为操作者提供与虚拟系统交互的工具,来模拟光学内窥镜在人体组织内部的 移动,是虚拟内窥镜系统的入口。输入设备需要实时获得操作者的动作,向系统报告。 在虚拟内窥镜系统中,输入设备无论是在使用自由度和空间活动范围上都应该模拟光 学内窥镜前端摄像机的动作。 3.主计算机 主要是提供图像预处理、构造模型、计算漫游路径三部分功能。 (1) 图像预处理:主要是从采样设备获取的原始图像数据提取出特定的组织,如食管、 气管、支气管、胃、结肠、血管等,还包括对原始图像的滤波等操作。 (2) 构造模型:建立真实感绘制所需要的模型。如果采用面绘制方法,就需要抽取特 定组织的表面,建立相应的表面模型;如采用直接体绘制方法,则需对特定组织的体 素赋以颜色、不透明度等信息,进行直接体绘制。 (3) 计算漫游路径:操作人员可以选取漫游方式:自由漫游或按规定路径漫游。自由 漫游需要在漫游过程中进行实时地碰撞检测;按规定路径漫游需要事先规划漫游路径。
虚拟内窥镜技术(Virtual Endoscopy-VE)是虚拟 现实技术在现代医学中的应用。它利用医学影像作为 原始数据,融合图像处理、计算机图形学、科学计算 可视化、虚拟现实技术,模拟传统光学内窥镜的一种 技术。VE 克服了传统光学内窥镜需把内窥镜体插入人 体内的缺点,是一种完全无接触式的检查方法,还可 应用于辅助诊断、手术规划、实现手术的精确定位和 医务人员的培训等。从它出现到现在,该研究领域越 来越受到研究人员的关注。VE 的研究是近十年的事情, 在医学成像领域它是一种新兴的技术,主要起源于数 字医学成像如3D CT 和3D MRI 图像的可视化,特别 是由于1994年Visible Human 数据集的出现,使研究 取得了较大的发展。
A 虚拟结肠内窥镜图像
B 光学结肠内窥镜图像
结肠对应的CT图像
虚拟内窥镜的应用
• 目前,VE 的应用主要集中在那些具有空腔结构的器官 上 如气管、支气管、食管、胃、结肠、血管、内耳、心 脏等等。至今,VE 仍处于初期临床试验阶段。 • 虚拟内窥镜作为一种全新的医学检查、诊断方法,节 省了使用镇静剂、插入探测器、住院治疗和术后观察等措 施,降低了检查的复杂性、危险性和成本。从理论上讲, 种人体内部结构都可以使用这种技术来进行模拟检查。虽 然目前的应用仅局限于教学、培训和设计治疗方案等少数 领域且处于初级研究阶段,但随着计算机和医学成像技术 的飞速发展,虚拟内窥镜研究不仅有重要的理论意义,而 且有着广阔的应用前景。
VE 的发展大体可分为三代。第一代VE 运用几 何模型,生成解剖结构的3D 几何形状,附加一些 简单的交互操作,生成简单的飞行效果,产生较为 粗糙的动画效应,在医护人员的教育和培训中得到 应用。随着计算机性能的提高,VE 发展到第二代, 使用高分辨率的可视化人体数据如CT、MRI 或其它 图像数据,能够产生更逼真的图像,大大增加了VE 的真实性、视觉逼真性和临床实用性,当前正处于 第二代研究阶段。未来第三代VE 在考虑人体器官 组织的集合形状的同时,将加入不同解剖组织的物 理特性和生物特性,将生成一个在物理上、生理上 和系统上都完全逼真的VE 系统。
路径规划
• 在采用体重建绘制结果图像过程中涉及 巨大的数据量,考虑到实时性要求,一般 是首先进行路径规划,抽取出对应空腔结 构组织器官的中心路径,然后按照这条关 键路径进行漫游。