基于神经网络的系统建模
基于优化神经网络模型的系统建模仿真研究
2 神 经 网 络模 型 结构 优 化
设 计神 经 网络模 型是 一个综 合性 问题 ,需要 满 足多种 不 同要 求 ,例 如神 经 网络模 型应具 有训练 速 度 快 、泛化 能力好 、易于 硬件实现 等 。这取 决 于对 象 的复 杂度 、所设计 的神经 网络模 型结构 以及样 本
摘 要 :建立一个结 构优化 的系统模型是设计控制系统的基础 ,但 对于实际系统尤其是非线性系统一般没有统
一
表达形式 ,其模 型结构难 以构造 ,对其结 构优化难以实施 ,给非线性 系统 建模带来很大 困难 。为此 ,基于神
经 网络理论 , 分析了非线性系统的神经 网络模型并对其神经网络模型结构进行仿真研究 。 基于 0 S O t aBa B ( pm l ri i n
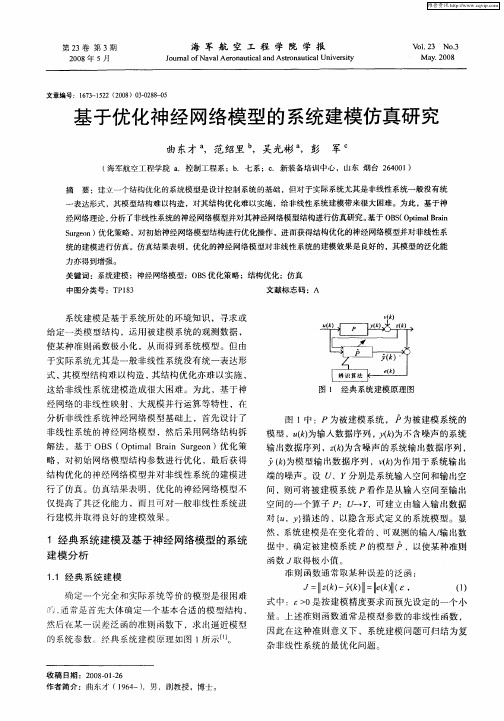
() 尼为模 型输 噪声 。设 、】分别 是系统输 入空间 和输 出空 , 问 ,则 可将被建模 系统 P看作是 从输 入空 问至输 出 空间 的一 个算子 尸: 】 , ,可建立 由输入输 出数 据 对 { ,y 描述 的 、以隐含形式 定 义的系统模 型。显 “ _ }
中图 分 类 号 :T 13 P 8 文献 标 志 码 :A
系统 建模是基 于系统所处 的环境知 识 ,寻求 或 给定一 类模型结 构 ,运用 被建模 系统 的观测数 据 ,
使某种 准则 函数极 小化 ,从 而得到 系统 模型 。但 由 于实际 系统尤其 是一般非 线性系统 没有统一 表达形 式, 其模型结 构难 以构造 , 其结构优 化亦难 以实施 ,
这给非线 性系统 建模造成 很大困难 。为此 ,基 于神 经 网络 的非线性 映射 、大 规模 并行运算 等特性 ,在
基于神经网络的智能机电传动系统建模与控制策略研究

基于神经网络的智能机电传动系统建模与控制策略研究智能机电传动系统是指利用智能控制技术实现机电装置的精确控制和智能化运行的系统。
它的核心是建立准确的机电传动模型,并设计有效的控制策略,以实现系统的高效运行和优化性能。
本文将围绕基于神经网络的智能机电传动系统建模与控制策略展开研究,通过对相关理论、方法和应用进行综述和分析,旨在为实际应用提供参考和启示。
一、智能机电传动系统建模智能机电传动系统建模是实现精确控制的基础。
建模过程中需要考虑系统的结构、特性和动力学方程等因素,以得到准确的系统模型。
针对复杂的机电传动系统,传统的建模方法难以满足要求,而基于神经网络的建模方法能够更好地应对这一挑战。
基于神经网络的智能机电传动系统建模方法主要包括以下几个步骤:1. 数据采集和处理:通过传感器获取机电传动系统的输入输出数据,并进行预处理,包括降噪、滤波、采样等,以提高数据的质量和准确性。
2. 网络结构选择:根据系统特性和建模需求选择合适的神经网络结构,常见的包括前馈神经网络(FFNN)、循环神经网络(RNN)和自组织神经网络(SOM)等。
3. 参数训练和优化:使用采集的数据对神经网络的参数进行训练和优化,以使网络能够准确地拟合系统的输入输出关系。
常用的训练算法包括误差反向传播算法(BP)和遗传算法等。
4. 模型验证和评估:将训练好的神经网络模型进行验证和评估,验证其对系统的输入输出关系的拟合程度和预测能力。
二、智能机电传动系统控制策略研究基于神经网络的智能控制策略在机电传动系统中得到了广泛应用。
通过训练好的神经网络模型,可以实现传动系统的精确控制和优化运行。
以下是几种常见的基于神经网络的智能机电传动系统控制策略:1. 基于神经网络的模糊控制:将神经网络与模糊控制相结合,实现对机电传动系统的模糊推理和控制。
通过训练模糊神经网络,可以自适应地学习系统的非线性特性和模糊规则,从而实现对系统的精确控制。
2. 基于神经网络的自适应控制:通过训练神经网络,实时地学习和调整系统的参数和控制策略,以适应外部环境的变化和系统内部的不确定性。
基于神经网络的动力学建模与控制研究

基于神经网络的动力学建模与控制研究随着科技的不断进步,神经网络技术在各个领域的应用得到了越来越广泛的推广。
其中,基于神经网络的动力学建模与控制研究成为了一个热门话题。
神经网络可以模拟大脑下的感知、认知、控制和决策等系统的行为,将传统的模型变得更加逼真,同时也具有更好的泛化性能。
本文将探讨基于神经网络的动力学建模与控制研究的相关问题。
一、神经网络在动力学建模中的应用神经网络在动力学建模中广泛应用于环境监测、智能交通、无人机、机器人等领域。
在这些领域中,动力学建模可以对物理现象进行建模与仿真,从而实现预测、控制和优化等目的。
例如,在环境监测中,神经网络可以通过传感器获取环境数据并进行分析、处理,找到环境数据之间的关系,并对可能出现的环境问题进行预测和控制。
在智能交通领域,神经网络可以帮助自动驾驶汽车快速反应并做出正确的判断,确保交通安全。
在机器人领域,神经网络可以对机器人行为进行控制,从而实现较高的自主性和智能化。
二、神经网络在动力学控制中的应用神经网络在动力学控制中的应用一直是学者们研究的重点。
动力学控制是指通过学习和预测未来状态,确定动态系统的最优控制策略来达成预期的目标。
神经网络可以通过对动态系统进行建模和控制,实现对系统的快速响应、精确控制、稳定运行等目的。
例如,在工业自动化领域中,神经网络可用于智能样机的控制和优化设计,以达到增加生产效率、减少成本的目的;在金融领域中,神经网络可以用于交易策略的预测和优化,提高投资收益率;在电力系统中,神经网络可用于电力负荷预测和优化调度,保证系统的稳定运行。
三、神经网络建模与控制研究中存在的问题虽然神经网络在动力学建模与控制研究中的应用范围很广,但在实际应用过程中,还存在着一些问题亟待解决。
1. 神经网络参数选择问题神经网络需要选择最优的参数来进行训练和优化。
算法的抉择和参数的选择都对神经网络的精度和泛化能力有着重要影响。
如何选择合适的参数和算法,是当前研究的重点。
基于神经网络的复杂非线性系统建模与控制技术研究

基于神经网络的复杂非线性系统建模与控制技术研究复杂非线性系统建模与控制技术一直是控制理论领域研究的热点之一。
神经网络模型由于其强大的非线性拟合能力和广泛的应用场景,在非线性系统建模和控制方面也具有重要的地位。
本文主要讨论基于神经网络的复杂非线性系统建模与控制技术研究的现状和未来发展方向。
一、复杂非线性系统的建模1.传统方法传统的复杂非线性系统建模方法主要基于数理统计和系统辨识理论,例如ARMA模型、滑动平均模型、自回归移动平均模型等,这些方法要求系统的动力学方程必须是线性和参数可识别的。
但是,在实际应用过程中,很多系统的动力学方程都是非线性的,而且系统的特性通常是不确定和时间变化的,这些传统方法的建模能力在面对这些问题时会受到很大的限制。
2.基于神经网络的方法基于神经网络的建模方法具有较强的非线性逼近能力、泛化能力和鲁棒性,能够更好地适应实际系统的的复杂性、不确定性和时变性。
神经网络模型可以通过无监督学习和有监督学习来实现建模过程。
其中,无监督学习主要包括自组织特征映射网络、高斯混合模型等,有监督学习主要包括前馈神经网络、复杂神经网络等。
这些方法在复杂非线性系统建模和识别方面得到了广泛应用和研究。
二、复杂非线性系统的控制复杂非线性系统的控制方法主要包括传统控制方法和基于神经网络的控制方法。
1.传统控制方法传统的控制方法依赖于已知的系统模型,通常包括PID控制、模型预测控制、自适应控制等。
但是,在实际应用中,由于系统的不确定性和复杂性,传统的控制方法很难有效控制复杂非线性系统。
2.基于神经网络的控制方法基于神经网络的控制方法相对传统控制方法更具优势。
通过学习过程对非线性系统进行自适应在线辨识和控制。
其中,反向传播神经网络、径向基函数网络、自适应神经控制等方法在复杂非线性系统控制方面表现出了较高的控制精度和鲁棒性。
三、未来研究方向在基于神经网络的复杂非线性系统建模和控制领域,仍然存在许多研究问题亟待解决。
基于神经网络的非线性系统建模研究与应用

基于神经网络的非线性系统建模研究与应用随着科技的不断发展,许多系统越来越复杂,人们对非线性系统的建模和分析的需求越来越迫切。
传统的线性系统建模方法已经无法满足当今社会的需求,因此神经网络成为了非线性系统建模中的一种重要方法。
一、神经网络的概念和应用神经网络是人工智能的一个重要分支,在计算机科学、电子工程等领域得到广泛应用。
它是一种模拟大脑神经网络的人工智能算法,具有自适应、容错等特点,能够处理非线性系统建模中的复杂问题。
神经网络可以用来处理图像识别、语音识别、自然语言处理、预测和分类等任务,还可以用于机器学习、数据挖掘、模式识别等领域。
在非线性系统建模中,神经网络经常用来进行数据建模、分类、预测等任务。
二、神经网络的结构和参数神经网络由神经元、连接权重、偏置等组成。
神经元是神经网络的基本单元,连接权重表示不同神经元之间的权重关系,而偏置则是神经元的偏移量。
其中,神经元的输入是通过权重与前一层神经元的输出相乘后相加得到的,再经过一个非线性激活函数进行计算,输出结果则是该神经元的输出。
神经网络的参数包括连接权重和偏置值。
连接权重是神经元的连接关系,而偏置则是神经元的偏移量。
神经网络的参数调整主要包括权重更新和梯度下降。
权重更新是通过神经元的输出误差与学习速率进行计算,梯度下降则是向误差最小化的方向进行调整。
三、非线性系统建模中神经网络的应用非线性系统具有复杂的非线性关系,传统的线性模型已经无法满足建模需求。
而神经网络可以通过训练来建立算法模型,非常适合非线性系统的建模。
在非线性系统建模中,神经网络可以通过学习输入和输出数据之间的联系,从而建立一个数据模型。
首先,根据系统的输入和输出数据建立样本数据集;然后,选择适当的神经网络结构来进行训练和学习;最后,通过测试数据的预测误差来评估和调整模型的性能。
以电力系统为例,电力系统的运行过程具有复杂的非线性关系。
通过使用神经网络的建模方法,可以对电力系统的功率负载进行建模和预测,同时减少电力系统的故障和损失。
人体神经网络系统建模及功能解析分析
人体神经网络系统建模及功能解析分析人体的神经网络系统是一个复杂而精密的组织,由大脑、脊髓和周围神经组成。
它具有多种功能,包括感知、运动控制、内脏活动的调节以及思维和意识的产生。
本文将对人体神经网络系统的建模和功能进行解析分析。
首先,人体的神经网络系统可以通过建模来理解其结构和功能。
建模的目标是对整个系统进行抽象和描述,以便更好地研究和理解其运行机制。
建模可以基于不同层次和尺度的方法,包括分子、细胞、组织和器官水平。
例如,分子层面的建模可以研究神经递质在突触传递中的作用,细胞层面的建模可以研究神经元的电活动和兴奋性传导,组织层面的建模可以研究不同脑区之间的连接和信息传递,器官层面的建模可以研究大脑和脊髓在整体行为和认知中的作用。
其次,神经网络系统的功能可以通过分析其组成部分的相互作用来进行解析。
神经元是神经网络系统的基本单位,它们之间通过突触连接形成复杂的网络。
神经元的兴奋性传导和突触传递是神经网络系统功能实现的关键。
神经元的兴奋性传导是指当神经元受到足够的刺激时,电信号会沿着它的轴突传导到突触,并通过神经递质释放到下一个神经元。
突触传递是指神经递质在突触间隙中传递,以影响下一个神经元的兴奋性状态。
这些传导和传递过程的细节和效率对于神经网络系统的功能实现至关重要。
神经网络系统的功能还可通过研究特定区域和结构的功能分化来进行解析。
大脑是神经网络系统的核心,负责高级认知功能、意识、思维和情感调节。
大脑有多个区域和结构,每个区域和结构都有特定的功能。
例如,脑干控制基本的生命维持功能,大脑皮层负责感知和运动控制,海马体负责记忆和学习等。
通过研究这些区域和结构的功能分化,可以更深入地了解神经网络系统的整体功能。
此外,神经网络系统的功能可以通过研究其在疾病状态下的改变来进行解析。
神经网络系统在多种神经系统疾病中发挥关键作用,如阿尔茨海默病、帕金森病和精神分裂症等。
通过比较疾病和健康状态下神经网络系统的差异,可以揭示疾病的发病机制和病理过程,为疾病的诊断和治疗提供理论基础。
基于自组织神经网络的非线性系统建模

以为模糊建模提供好的模型结构, 并且有较高的计算效率和精度。
关键词: 模糊 c均值聚类 ; 模糊建模 ; — 模糊模型 ; T s 竞争学习
中图分 类号:P 7 . T234 文献标识码 : A
M o ei fNo l a y tm s d o ef— o g n z to ur lM a dl ng o n i r S se Ba e n S l — r a ia i n Ne a ne p
维普资讯
第2 卷 第5 4 期
文章编号 :0 6-94 ( 07 0 0 4 10 38 20 ) 5- 12-9 3
计
算
机
仿
真
27 月 0 年5 0
基 于 自组 织神 经 网络 的非 线性 系统 建模
车玫芳 , 陈希 平 , 柴飞 燕
( 兰州理工大学电信学院 , 甘肃 兰州 7 05 ) 30 0 摘要 : 针对基于 T—S模糊模型 的非线性系统建模问题 , 提出 了一种基 于 自组 织神经 网络 的新 方法。在 T—S模糊模型的建
C i a g, HEN Xi ig C HE Me —fn C —p n , HAIF i a e —y n
( e a m n o A t t s L nhuU i ri f eh o g ,a zo a s 3 0 0 C i ) D pr et f u mac , a zo n esyo cnl y LnhuG nu7 05 ,hn t o i v t T o a
.
KEYW ORDS: u z —me n l sei g F zy mo eiห้องสมุดไป่ตู้g T—S f zy r o e ; o ei v e r i g F zyC a scu trn ; u z d l ; n u z d l C mp t ie la n n o t
基于神经网络的系统建模研究
从 基 本 的神 经 网络 结 构 出发 , 建 了一 个 多输 入 单 输 出的 神 经 网络 系统 , 用 这 个模 型 对 电容 柜 各 组 数 据 的 最 大 值进 构 使 行 预 测 , 得 了 良好 的 效 果 。 而 改进 上 述 神 经 网络 模 型 , 入 循 环 迭 代 操 作 , 到 了动 态的预 测效 果 。 Malb仿 真 结 果 取 继 加 得 从 t a
1 项 目背 景 1 1研 究 背 景 及 意 义 .
() 2 网络 权 值 和 阀 值
W W1 … , 代表 网络 权 值 , 2 w ’ 表示 输 入 与神 经元 之 间 的连
接 强度 ; b为 神 经 元 阀 值 , 以看 作 是 一 个 输 入 恒 为 1的 网 络权 可 值 。用 1 n行 矢 量 W 来 表 示 : x
《 业 控 制 计 算 机 } 0 2年第 2 工 21 5卷第 1期
基于神经网络的系统建模研究
S se Mo e ig Re e r h o B s d o u a t o s y t m d l s a c n a e n Ne r lNe wr k n
周杭 挺 许 力 ( 浙江大学电气工程学院, 浙江 杭 州 3 0 0 ) 10 7
3 所 有 定 量 或 定性 的信 息 都 等 势分 布在 网络 内的各 神 经 元 , ) 具有 很 强 的鲁 棒 性 和 容 错 性 ; 4 采 用 并 行 分 布处 理 方 法 , 快 速进 行 大 量 运 算 成 为 可 能 。 ) 使 这 些 特 点 显 示 了神 经 网络 在 处 理 高度 非 线 性 和严 重 不 确 定
中看 到 , 最 大 温 度 和 将 来 温 度 的预 测 都 有 良好 的 效 果 , 进 一 步做 故 障诊 断 、 测 控 制 打 下 了基 础 , 用 Malb编 程 来 对 为 预 使 t a
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
• 串并行NN模型为
ˆ (k 1) NNf ( x(k )) NNg (u(k )) x
• 辨识结构图
• 辨识目标:辨识状态渐近等价真实状态 • NNf, NNg均用含有两层隐层的前向网络, 隐层节点数分别为20,10.输入、输出节 点数均为1。 • 输入信号采用均匀分布于[-2,2]的随机 数。 • 学习步长取为0.08,训练10万次结束。 •取
被控对象
y p (k 1) f ( y p (k ),, y p (k n 1),u(k ),, u(k m 1))
f (.)是未知的非线性函数. 神经网络模型(串并联)
ˆ ( y (k ),, y (k n 1), u(k ),, u(k m 1)) ym (k 1) f p p
u(k ) sin(2k / 25) sin(2k / 10)
• 实际状态与网络状态的比较
NN辨识模型和实际系统的输出基本吻合
NN用于控制
r(t) u(t)
+
_
y(t)
被控对象
NN
离散系统神经网络控制
被控对象
y p (k 1) f ( y p (k )) g ( y p (k ))u(k )
第九讲
基于神经网络的系统建模和控制
基于神经网络的系统建模和控制
• 神经网络辨识器 • 神经网络控制器
NN辨识器(1)
• 正向建模(并联)
u(k)
被控对象
yp(k)
+
_
e(k)
NN模型
ym(k)
被控对象
y p (k 1) f ( y p (k ),, y p (k n 1),u(k ),, u(k m 1))
这是三元未知函数,假设由此确定u(t)未 知函数,用NN来逼近这个函数。
连续系统神经网络控制(2)
神经网络控制
r (t )) u (t ) NN ( y p (t ), y r (t )) wT (t ) s ( y p (t ), y
其中w是权重矩阵,s是归一化基向量函数。这里NN模型 是径向基Gauss网络模型。 参数自适应律为
fˆ (.)是f 的NN近似模型
神经网络系统辨识模型
• 确定BP网络的结构和参数 • 离线利用BP学习算法训练NN • 获得辨识模型(并联或串并联)
建模实例
• 未知非线性系统为
x(k 1) f ( x(k )) g (u (k )) x( k ) 3 u (k ) 2 (1 x(k ))
f (.)是未知的非线性函数. 神经网络模型(并联)
ˆ ( y (k ),, y (k n 1),u(k ),, u(k m 1)) ym (k 1) f m m
fˆ (.)是f 的NN近似模型
NN辨识器(2)
• 正向建模(串并联) u(k)
被控对象
yp(k)
+ _
NN
ym(k)
神经网络控制
u (k ) NN ( y p (k ), yr (k 1)) wT (k ) s ( y p (k ), yr (k 1))
其中w是权重矩阵,s是归一化基向量函数。这里NN模型 是径向基Gauss网络模型。 参数自适应律为
w(k 1) w(k ) e(k )s( y p (k ), yr (k 1))
ˆ e(t )s( y pБайду номын сангаас(t ), y r (t )) w
未知连续动态系统的自适应跟踪控制
That is all for this Talk!
未知离散动态系统的自适应跟踪控制
连续系统神经网络控制
被控对象
p (t ) f ( y p (t )) g ( y p (t ))u(t ) y
f (.), g()均是未知的非线性函数, yr(t)是给定的目标轨线。 控制目标:设计控制使得系统的输出跟踪上目标轨线,即
r (t ) f ( y p (t )) g ( y p (t ))u(t ) y
f (.), g()均是未知的非线性函数, yr(k)是给定的目标轨线。 控制目标:设计控制使得系统的输出跟踪上目标轨线,即
yr (k 1) f ( y p (k )) g ( y p (k ))u(k )
这是三元未知函数,假设由此确定u(k)未 知函数,用NN来逼近这个函数。
离散系统神经网络控制(2)