PWM控制舵机 C程序
PWM调速的C语言程序编写(非常简单)
PWM调速的C语言程序编写关于PWM的原理在上一篇文章中已经说的很详细了,现在就细说一下pwm C语言程序的编写。
C语言中PWM的编写有这么几种方法;一、用普通的I/O 口输出的PWM ,二、使用定时计数器编写,三、就是使用片内PWM了。
1 先说使用普通的I\O口编写PWM程序了。
使用I/O口输出PWM波形你必须首先明白PWM他的实质是:调制占空比,占空比就是波形中高电平的长度与整个波长的比值。
我们写C语言的目的是写PWM波形的一个周期。
在这个周期内高低电平的比值是可以改变的。
这也就符合了PWM的原意脉宽调制。
即高电平的宽度的调制。
当然了PWM他也可用于改变频率,我们这里只先说他改变脉宽。
一旦我们的C语言程序写完那么他产生的PWM波形的频率就一定了。
(也可写频率变化的PWM,难度有点大)一般我们控制使用1K到10K的PWM波进行控制。
当然了你也可在要求不是很高的地方使用频率更低的PWM波。
比如在飞思卡尔智能车比赛中我们学校使用的PWM波频率只有600HZ.我们要改变一个PWM波周期内的高电平的宽度显然需要将一个PWM波的周期分成单片机可以控制的N个小的周期,N的取值越大你的调速等级越高,但产生的PWM频率就越低。
我们下面以实现100级调速为例编写PWM程序。
先写出程序再慢慢给大家分析void pwm (uchar x,uint y) //X 为占空比 Y为函数使用时间{ uint i,j,a,b;for(i=y;i>0;i--)//定时外函数{for(j=7;j>0;j--)//定时内函数{for(a=y;a>0;a--) / /PWM波高电平宽度{PORTA=0X01;}for(b=100-y;b>0;b--) //PWM低电平宽度{PORTA=0X00;}}}}这个程序够简单吧轻松的实现AVR单片机的PA.0口输出7KHZ左右的PWM脉冲你可以将PORTA=0X01;改为P1.0=0X01;就可以移植到51单片机上了为什么使用参数Y定时是因为用普通I/O口控制它的开关没有使用定时器编写的灵活。
pwm控制舵机程序
pwm控制舵机程序章节一:引言在机器人工程和自动化领域中,舵机是常用的控制组件之一。
它具有小型化、高功率密度、高稳定性和高精度控制等优点,被广泛应用于机械手臂、无人机、汽车模型等领域。
PWM(脉宽调制)技术是一种常用的舵机控制方法,通过调整PWM信号的占空比来控制舵机的位置和角度。
本论文将介绍PWM控制舵机的原理和实现方法,以及相关的电路设计和程序编写。
本文的目的是帮助读者理解PWM控制舵机的基本原理和实现过程,并为舵机控制系统的设计和开发提供参考。
章节二:PWM控制舵机原理2.1 脉宽调制技术脉宽调制技术是一种将模拟信号转换为数字信号的方法。
它通过改变数字信号中的脉冲宽度来模拟模拟信号的幅度变化。
在PWM控制舵机中,通常使用的是固定频率的PWM信号。
通常,脉宽调制技术通过改变脉冲的占空比(High电平的时间与周期的比值)来实现不同的输出。
2.2 舵机工作原理舵机是一种基于PWM信号控制的电机。
它通过接收PWM信号来控制转轴的角度。
舵机通常由电机、伺服控制电路和位置反馈元件组成。
伺服控制电路将接收到的PWM信号与位置反馈进行比较,并控制电机的转动来实现所需的舵机位置和角度。
章节三:PWM控制舵机的电路设计3.1 舵机电路原理图本文设计的舵机电路采用基于微控制器的PWM信号发生器和舵机驱动器。
PWM信号发生器负责产生固定频率的PWM信号,而舵机驱动器负责将PWM信号转换为电机驱动信号以控制舵机的转动。
电路的主要部分是使用可编程微控制器作为信号发生器和驱动器的核心组件。
3.2 电路参数设计本文设计的电路需要满足舵机的工作电压、驱动电流和PWM信号的频率要求。
根据所选用的舵机型号和规格,确定电路中的关键参数,包括驱动电压、最大输出电流、PWM信号频率等。
章节四:PWM控制舵机程序编写4.1 硬件初始化在编写PWM控制舵机程序之前,首先需要进行硬件初始化,包括设置PWM信号发生器和驱动器的引脚和参数,以及舵机电路的供电。
PWM调速C程序编写

例如:实现周期为1000us,占空比为20%的PWM,用PA0实现
首先设置T0为83 (11.0592M晶振)
T1为65501
首先初始化PA0=1,两个定时器同时打开,在定时器T1中断时拉低PA0,
在定时器T0中断时在拉高PA0,同时将两定时器初始值初始化T0为83,T1为65501
一开始设置PA0为高电平,当count1加到200的时候拉低PA0,
等count1到1000了在拉高PA0,同时复位count1=0,
不过这样做的缺点是精度不高,要是PWM所需周期段,精度高的话还是用两个定时器来实现;
************************************************/
SREG=0x80;
while(1);
}
#pragma vector = TIMER0_OVF_vect
__interrupt void TIMER0_OVF(void)
{
PWM_PA0=1;
TCNT0=0x53;
}
#pragma vector = TIMER1_OVF_vect
__interrupt void TIMER1_OVF(void)
}
void timer0_init(void)
{
SREG=0x80;
TIMSK|=(1<<TOIE0);
TCCR0|=(0<<CS02)|(0<<CS01)|(1<<CS00);
TCNT0=0x91;
}
void main(void)
{
port_init();
pwm舵机控制

pwm舵机控制第一章:引言随着自动化技术的不断发展,舵机成为机器人、无人机、智能家居等领域中重要的执行器之一。
舵机控制的准确性和稳定性对于这些应用来说至关重要。
PWM(脉宽调制)技术已被广泛应用于舵机控制中,它通过控制舵机电源的脉冲宽度来实现舵机的位置控制。
本论文将重点研究PWM舵机控制方法,并进行相关性能分析和实验验证。
第二章:PWM舵机控制原理2.1 PWM技术概述脉宽调制技术是一种通过改变控制信号的脉冲宽度来控制设备的平均功率输出的方法。
在舵机控制中,PWM技术被用于控制电源脉冲信号的宽度,进而控制舵机的角度或位置。
通常,PWM信号的高电平代表一个角度,而低电平则代表另一个角度。
2.2 PWM舵机控制原理PWM舵机控制分为两个阶段:位置检测和角度控制。
在位置检测阶段,舵机读取输入信号的脉宽,通过内部电路将其转化为相应的角度。
而在角度控制阶段,PWM信号控制舵机的转动。
具体来说,当PWM信号的脉冲宽度大于一个阈值时,舵机向一个方向转动;当脉冲宽度小于该阈值时,舵机向另一个方向转动。
第三章:PWM舵机控制方法3.1 基于PID控制算法的PWM舵机控制PID控制算法是一种常用的控制算法,可以根据目标值与实际值的误差来调整控制信号,进而实现对舵机位置的控制。
在PWM舵机控制中,可以使用PID控制算法来计算控制信号的脉冲宽度,使舵机保持在目标角度附近。
3.2 基于反馈机制的PWM舵机控制在PWM舵机控制中,可以通过添加反馈机制来提高舵机的姿态控制精度。
反馈机制可以通过使用角度传感器或加速度传感器等设备来获取舵机的实际位置信息,并将其与目标位置进行比较。
通过不断调整控制信号的脉冲宽度,可以使舵机快速准确地达到目标姿态。
第四章:实验与结果分析本章将进行一系列实验来验证PWM舵机控制方法的性能。
实验中将计算不同PWM信号脉冲宽度对舵机位置和角度的影响,并进行比较分析。
通过实验结果的对比和分析,可以评估不同的舵机控制方法的优缺点,为实际应用提供指导。
基于C51单片机的直流电机PWM调速控制(包含原理图及C源代码)
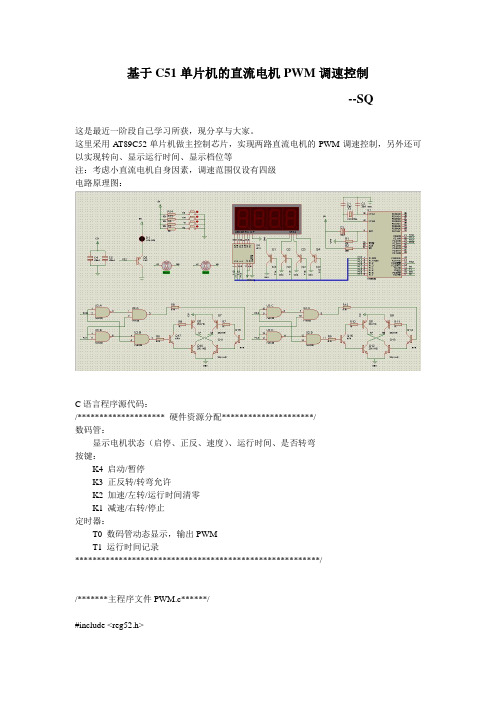
基于C51单片机的直流电机PWM调速控制--SQ这是最近一阶段自己学习所获,现分享与大家。
这里采用A T89C52单片机做主控制芯片,实现两路直流电机的PWM调速控制,另外还可以实现转向、显示运行时间、显示档位等注:考虑小直流电机自身因素,调速范围仅设有四级电路原理图:C语言程序源代码:/******************** 硬件资源分配*********************/数码管:显示电机状态(启停、正反、速度)、运行时间、是否转弯按键:K4 启动/暂停K3 正反转/转弯允许K2 加速/左转/运行时间清零K1 减速/右转/停止定时器:T0 数码管动态显示,输出PWMT1 运行时间记录********************************************************//*******主程序文件PWM.c******/#include <reg52.h>#include "Afx.h"#include "Config.c"#define CIRCLE 5 //脉冲周期//按键定义uchar key,key_tmp=0, _key_tmp=0;//显示定义uchar LedState=0xF0; //LED显示标志,0xF0不显示,Ox00显示uchar code LED_code_d[4]={0xe0,0xd0,0xb0,0x70}; //分别选通1、2、3、4位uchar dispbuf[4]={0,0,0,0}; //待显示数组uchar dispbitcnt=0; //选通、显示的位uchar mstcnt=0;uchar Centi_s=0,Sec=0,Min=0; //分、秒、1%秒//程序运行状态标志bit MotState=0; //电机启停标志bit DirState=0; //方向标志0前,1后uchar State1=-1;uchar State2=-1;uchar State3=0;uchar State4=-1;uchar LSpeed=0;uchar RSpeed=0;//其他uint RunTime=0;uint RTime_cnt=0;uint LWidth;uint RWidth; //脉宽uint Widcnt=1;uint Dispcnt;//函数声明void key_scan(void);void DisBuf(void);void K4(void);void K3(void);void K2(void);void K1(void);void disp( uchar H, uchar n );void main(void){P1|=0xF0;EA=1;ET0=1;ET1=1;TMOD=0x11;TH0=0xFC;TL0=0x66; //T0,1ms定时初值TH1=0xDB;TL1=0xFF; //T1,10ms定时初值TR0=1;Widcnt=1;while(1){key_scan();switch(key){case 0x80: K1(); break;case 0x40: K2(); break;case 0x20: K3(); break;case 0x10: K4(); break;default:break;}key=0;DisBuf();LWidth=LSpeed;RWidth=RSpeed;}}//按键扫描**模拟触发器防抖void key_scan(void){key_tmp=(~P3)&0xf0;if(key_tmp&&!_key_tmp) //有键按下{key=(~P3)&0xf0;}_key_tmp=key_tmp ;}//按键功能处理/逻辑控制void K4(void){if(State4==-1){State4=1;TR1=1;dispbuf[3]=1;LedState=0x00; //打开LEDMotState=1; //打开电机LSpeed=1;RSpeed=1; //初速设为1}else if(State4==1){State4=0;TR1=0;MotState=0; //关闭电机}else if(State4==0){MotState=1;if(State3==0){State4=1;TR1=1;}else if(State3==1){LSpeed=2;RSpeed=2;}}}void K3(void){if(State4==1)DirState=!DirState;if(State4==0){if(State3==0){State3=1; //可以转向标志1可以,0不可以TR1=1;dispbuf[3]=9;MotState=1;LSpeed=2;RSpeed=2;}else if(State3==1){State3=0;TR1=0;dispbuf[3]=0;MotState=0;}}}void K2(void){if(State4==1&&LSpeed<4&&RSpeed<4){LSpeed++;RSpeed++;}else if(State4==0){if(State3==0){//State4=-1;//LedState=0xF0;MotState=0;Sec=0;Min=0;}else if(State3==1&&LSpeed<4&&RSpeed<4){//TurnState=0;LSpeed=2;RSpeed++;}}}void K1(void){if(State4==1&&LSpeed>1&&RSpeed>1){LSpeed--;RSpeed--;}else if(State4==0){if(State3==0){State4=-1;LedState=0xF0;MotState=0;}else if(State3==1&&LSpeed<4&&RSpeed<4){//TurnState=1;LSpeed++;RSpeed=2;}}}//显示预处理void DisBuf(void){if(RTime_cnt==100){Sec++;RTime_cnt=0;}if(Sec==60){Min++;Sec=0;}if(State4==1){dispbuf[0]=Sec%10;dispbuf[1]=Sec/10;dispbuf[2]=Min;if(!DirState) //正转dispbuf[3]=LSpeed;if(DirState) //反转dispbuf[3]=LSpeed+4;}if(State4==0){if(State3==0){dispbuf[0]=Sec%10;dispbuf[1]=Sec/10;dispbuf[2]=Min;dispbuf[3]=0;}if(State3==1){dispbuf[0]=RSpeed;dispbuf[1]=LSpeed;dispbuf[2]=Min;dispbuf[3]=9;}}}//LED驱动void disp( uchar H, uchar n ){P1=n;P1|=LedState ;P1|=LED_code_d[H];}//T0中断**显示/方波输出void Time_0() interrupt 1{TH0=0xFC;TL0=0x66;Widcnt++;Dispcnt++;//电机驱动/方波输出if(Widcnt>CIRCLE){Widcnt=1;}if(Widcnt<=LWidth)LMot_P=!DirState&&MotState;elseLMot_P=DirState&&MotState;LMot_M=DirState&&MotState;if(Widcnt<=RWidth)RMot_P=!DirState&&MotState;elseRMot_P=DirState&&MotState;RMot_M=DirState&&MotState;//显示if(Dispcnt==5){disp(dispbitcnt,dispbuf[dispbitcnt]);dispbitcnt++;if(dispbitcnt==4){dispbitcnt=0;}Dispcnt=0;}}//T1中断**运行时间void Time_1() interrupt 3{TH1=0xDB;TL1=0xFF;RTime_cnt++;}/******配置文件Afx.h******/#ifndef _AFX_#define _AFX_typedef unsigned char uchar;typedef unsigned int uint;typedef unsigned long ulong;#endif/******IO配置文件Config.c******/#ifndef _Config_#define _Config_#include "Afx.h"#include <reg52.h>//显示定义sbit led=P3^2;//电机引脚定义sbit LMot_P=P2^2; sbit LMot_M=P2^3; sbit RMot_P=P2^0; sbit RMot_M=P2^1;#endif。
pwm占空比程序c语言程序

pwm占空比程序c语言程序Pulse Width Modulation (PWM) is a crucial concept in electronicsand can be implemented using a C language program. PWM is a method of controlling the amount of power delivered to an electronic device by varying the ON time and OFF time of a digital signal. This is achieved by changing the duty cycle of the signal, which is the ratio of ON time to the total time of one cycle. In a simple PWM circuit, the duty cycle determines the average voltage applied to the load, allowing for precise control of devices like motors, LEDs, and heaters.在电子学中,脉冲宽度调制(PWM)是一个至关重要的概念,可以通过使用C语言程序来实现。
PWM是一种控制向电子设备传送的功率量的方法,方法是通过改变数字信号的开启时间和关闭时间。
这是通过改变信号的占空比来实现的,占空比是开启时间与一个周期总时间的比例。
在一个简单的PWM电路中,占空比决定了施加到负载上的平均电压,从而实现对电机、LED和加热器等设备的精确控制。
Implementing a PWM program in C language involves using timer modules and I/O pins on a microcontroller. The timer is used togenerate a periodic signal, which is then modulated to create the desired PWM waveform. By manipulating the timer settings, such as the prescaler and period, the frequency and duty cycle of the PWM signal can be adjusted. The duty cycle is usually expressed as a percentage, with 0% representing a fully OFF signal and 100% representing a fully ON signal. This flexibility allows for customization of the PWM output to match the requirements of specific applications.在C语言中实现PWM程序涉及使用微控制器上的定时器模块和I/O引脚。
舵机控制程序简单
舵机控制程序简单第一章:引言(约200字)舵机是一种用于控制机械系统位置和速度的装置,广泛应用于各种机器人和自动化系统中。
它具有速度快、响应灵敏、精确度高等特点,因此在诸多领域都发挥着重要作用。
本论文将介绍一种简单的舵机控制程序,目的是实现对舵机位置的精确控制。
第二章:舵机控制原理(约300字)舵机控制基于脉宽调制(PWM)技术,即通过调整PWM信号的高电平时间来控制舵机的位置。
一般情况下,舵机可以控制在0到180度的范围内,其中90度为中间位置。
通过发送特定脉冲宽度的PWM信号,舵机可以定位到所需的位置。
舵机的输入信号通常为20ms周期的PWM信号,其高电平时间在0.5ms到2.5ms之间,对应着舵机位置的0到180度。
第三章:舵机控制程序设计(约400字)在设计舵机控制程序时,需要利用控制器(如Arduino)和相应的编程语言(如C++)来实现。
首先,需要将舵机控制引脚连接到控制器上,并设置控制引脚为输出模式。
然后,在主循环中,使用控制语句来发送特定脉宽的PWM信号来控制舵机位置。
可以根据需求设置不同的脉宽值,以达到精确控制舵机位置的目的。
例如,如果想将舵机定位到90度,可以发送1.5ms的高电平脉宽信号。
在程序设计中,可以使用函数来简化代码,使得控制舵机的过程更加清晰和灵活。
例如,可以设计一个函数用于设置舵机位置,用户只需调用该函数并输入目标位置即可。
同时,还可以添加对舵机位置范围的判断,以确保用户输入的位置在舵机可控范围内。
第四章:实验结果与讨论(约300字)通过编写舵机控制程序并进行实验,我们可以得到舵机精确控制位置的效果。
试验中,我们设定舵机定位到90度,并观察实际位置是否与设定位置一致。
实验结果表明,舵机在良好的控制条件下,能够实现较高的位置控制精度。
然而,由于舵机本身的特性和控制器的限制,可能存在一定的位置偏移和响应延迟。
在论文中,我们还会探讨一些可能影响舵机控制效果的因素,如控制器的采样率、舵机的质量和机械结构等。
单片机pwm控制舵机

单片机pwm控制舵机第一章:引言(大约200字)随着科技的不断发展,单片机技术在现代工业和自动化领域中的应用越来越广泛。
在这些应用中,控制舵机是非常常见的需求之一。
舵机通过调节输入的脉冲宽度来改变输出角度,因此使用脉冲宽度调制(PWM)信号来控制舵机的运动是一种常见的方法。
本论文将探讨如何使用单片机实现PWM控制舵机的方法和技术。
第二章:PWM控制舵机的原理与设计(大约300字)本章将介绍PWM控制舵机的原理和设计。
首先,将详细介绍PWM的概念和工作原理,以及舵机的工作原理。
然后,将讨论如何使用单片机生成PWM信号,并通过改变脉冲宽度来控制舵机的角度。
接下来,将介绍舵机控制电路的基本组成部分和连接方式。
最后,将给出一个具体的PWM控制舵机的电路设计示例。
第三章:单片机编程实现PWM控制舵机(大约300字)本章将介绍如何使用单片机进行编程,实现PWM控制舵机。
首先,将介绍使用哪种编程语言来编写单片机的程序,例如C 语言或汇编语言。
然后,将详细介绍如何编写程序来生成PWM信号,并通过改变脉冲宽度来控制舵机的角度。
此外,还将讨论如何根据实际需求调整PWM信号的频率和占空比。
最后,将给出一个具体的单片机编程实现PWM控制舵机的示例代码。
第四章:实验结果与讨论(大约200字)本章将介绍使用本论文中所提到的方法和技术实现PWM控制舵机的实验结果和讨论。
首先,将介绍所采用的实验平台和测试设备。
然后,将详细介绍实验过程和实验结果。
对于实验结果的讨论,将分析PWM信号的频率和占空比对舵机控制精度的影响。
最后,将讨论实验中可能遇到的问题和改进的方向。
结论(大约100字)通过本论文的研究,我们可以得出结论:使用单片机实现PWM控制舵机是一种可行且有效的方法。
通过调整PWM信号的脉冲宽度,可以精确控制舵机的角度。
同时,通过单片机编程实现PWM控制舵机也是相对简单的。
通过进一步的研究和实践,可以不断改进这一方法并应用于更广泛的应用领域中。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
#include "reg52.h"
sbit control_signal=P0^0;
sbit turn_left=P3^0;
sbit turn_right=P3^1;
unsigned char PWM_ON=15 ;//定义高电平时间
/******************************************************************/
/* 延时函数 */
/******************************************************************/ void delay(unsigned int cnt)
{
while(--cnt);
}
void display()
{
if(PWM_ON>=5&&PWM_ON<=7) P1=0xFD; //1灯亮,舵机接近或到达右转极限位置if(PWM_ON>7&&PWM_ON<=10) P1=0xFB; //2灯亮
if(PWM_ON>10&&PWM_ON<=13) P1=0xF7; //3灯亮
if(PWM_ON>13&&PWM_ON<=16) P1=0xEF; //4灯亮,舵机到达中间位置
if(PWM_ON>16&&PWM_ON<=19) P1=0xDF; //5灯亮
if(PWM_ON>19&&PWM_ON<=22) P1=0xBF; //6灯亮
if(PWM_ON>22&&PWM_ON<=25) P1=0x7F; //7灯亮,舵机接近或到达左转极限位置}
/******************************************************************/
/* 主函数 */
/******************************************************************/ void main()
{
//bit Flag;
TMOD |=0x01; //定时器设置 0.1ms in 11.0592M crystal TH0=(65536-78)/256;
TL0=(65536-78)%256; //定时0.1mS
ET0=1;//定时器中断打开
EA=1;//总中断
//IE= 0x82; //打开中断
TR0=1;
// PWM_ON=15 //的取值范围是6-25
while(1)
{
if(turn_left==0)
{
delay(1000);
if(turn_left==0)
{
while(!turn_left){}
PWM_ON+=1;
if(PWM_ON>25)
PWM_ON=25;
}
}
if(turn_right==0)
{
delay(1000);
if(turn_right==0)
{
while(!turn_right){}
PWM_ON-=1;
if(PWM_ON<6)
PWM_ON=6;
}
}
display();
}
}
/******************************************************************/ /* 定时器中断函数 */ /******************************************************************/ void tim(void) interrupt 1 using 1
{
static unsigned char count;
TH0=(65536-78)/256;
TL0=(65536-78)%256; //定时0.1mS,经过示波器的测量
if (count<PWM_ON)
{
control_signal = 1; //给高电平
}
else
{
control_signal=0 ;
}
count++;
if(count == 200)
{
count=0; //20ms一个周期
}
}。