试求下列性能泛函达到极值的必要条件
离散系统的极小值原理

u * (k ) = 0.2
x* (k ) = 1 − 0.2k
k = 0,1, 2,3, 4,
总结 应用离散欧拉方程求解等式约束和不等式约束 的离散极值问题比较麻烦,而用离散极小值原理处 理这种约束问题却很方便。特别是,当控制序列受 约束时,离散变分法不再适用,只能用离散极小值 原理或离散动态规划来求解离散极小值问题。
2 离散极小值原理
庞特里亚金发表极小值原理时,只讨论了连续系 统的情况。为了获得离散系统的极小值原理,有 人曾经从离散系统与连续系统比较接近这一事实 出发,设想把连续极小值原理直接推广到离散系 统中去,但除了采样周期足够小的情况外,结果 是失败的。 离散极小值原理的普遍论述比较复杂,证明过程 也十分冗长。为了简单起见,下面介绍控制向量 序列不受约束情况下的离散极小值原理,然后不 加证明地推广到控制向量序列受约束的情况。
因为: ∂Lk = λ (k + 1)
∂x(k )
∂Lk = u (k ) + λ (k + 1) ∂u (k )
∂Lk −1 = −λ ( k ) ∂x(k )
所以由离散欧拉方程(3-6)可得:
λ ( k + 1) = λ ( k ) = c
u ( k ) = −λ ( k + 1) = −c
其中 c为待定的常数。 将 u (k ) = −c 代入状态差分方程,有
离散极小值原理可以叙述如下: 定理3 [定理3-7] (关于离散系统末端状态受约束) [定理3-8] (关于离散系统末端状态自由) 定理3
[定理3-7] 定理3 7](关于离散系统末端状态受约束) 设离散系统状态方程
x(k + 1) = f [ x(k ), u (k ), k ]
西工大最优控制课程 第1章 变分法-2-欧拉方程

3 泛函求极值的一般步骤
问题:由 min J ( y) x1 F (x, y(x), y'(x))dx 求 yˆ, J ( yˆ)
y
x0
(1)由EULER方程
d
Fy
dx
(
F y
'
)
0
解出y的通解。
(2)由横截条件求出
F y
'
0
的表达式。
(3)将边值条件代入y的通解与
F y
'
0
求出积分常数,得到 yˆ
当一个端点固定时(假定x0固定)
F y x1 y' x0
Fy'y
x1
Fy'y x0
y(x0 ) 0
Fy'y x1 0Fy' x1 0
y(x0 ) y0
横截条件
F y x1 y' x0
0
当两个端点均可变时
y
y1(x)
y*(x)
δy1
δy0
y2(x)
F y x1 y' x0
Fy'y
x1
x1 0(横截条件)
x0
写成向量形式
t f
t0
(δy)T (Fy
d dx
Fy )dx (δy)T
Fy
x1 x0
0
标量函数F对y的一阶偏导
梯度向量,列向量
向量形式
tf t0
(δy)T (Fy
d dx
Fy )dx (δy)T
Fy
x1 x0
0
n维列向量
泛函极值存在的必要条件:
Fy
d dx
Fy
0
函数极值存在的必要条件
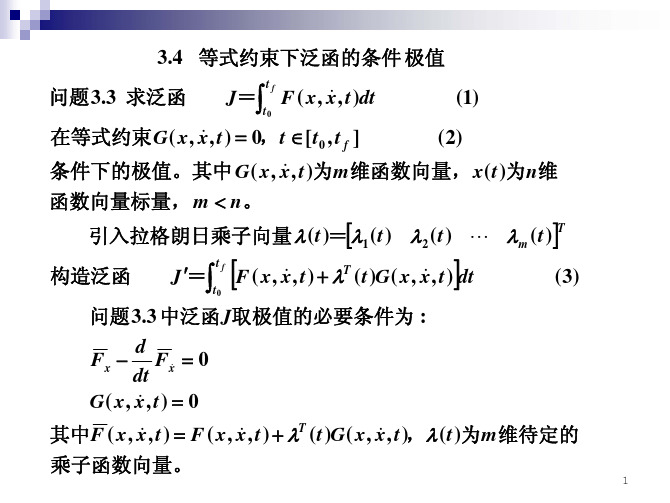
§6.3 泛函的条件极值

§6.3 泛函的条件极值一、泛函条件极值问题的提出(等周问题)求在连接A 、B 长度为L 的所有曲线中与直线AB所围成面积最大的曲线?AB 弧长:dx y L ba ∫+=2'1 (1) 曲线AB 与直线AB 所围成面积:()∫=ba dx x y S (2) 边界条件:()()0,0==b y a y (3)在满足约束条件(1)和边界条件(3)的情况下,寻找满足由方程(2)的构成泛函问题的极小曲线函数。
二、一般泛函条件极值的E-L 方程泛函[]()∫=ba dx y y x F y J ',,,约束条件()L dx y y x G ba =∫',,, 其中[][]()(){}2120,,,y b y y a y b a C y y y D ==∈=。
设()x y 是所求泛函的极值函数,取任意光滑函数()[]b a C x ,20∈η ()()()x x y x y εη+=1,()()0,0==b a ηη从而构成一元函数()[]()∫++=+=ba dx y y x F y J '',,εηεηεηεϕ ()L dx y y x G ba =++∫'',,εηεη 利用拉格朗日乘子法,定义新的泛函()()()[]∫+++++=Φba dx y y x G y y x F '',,'',,,εηεηλεηεηλε (4) 其中,λ为常数。
泛函()λε,Φ取极值,即需()0,0=Φ=εελεd d()()0'''',''''''''''0=⎟⎠⎞⎜⎝⎛−+−=⋅−++⋅−+=+++=+++=Φ∫∫∫∫∫∫∫∫∫∫=b a y y y y b a y b a y b ay ba yb a y b a y b a y b a y b a y b a y bay y y y dx G dx d G F dx d F dx G dx d G dx G dx F dx d F dx F dx G dx G dx F dx F dx G G F F d d ηλληληληληηηηληληηηληληηελεε由变分引理得(5) E-L 方程。
等式约束下泛函的条件极值
*
1
例 3.4
已知系统由两个积分环 节组成,始端条件为
θ (0) = 1,ω (0) = 1;终端条件为 θ (1) = 0,ω (1) = 0。
1 1 2 求最优控制 u ( t ),使性能指标 J = ∫ u ( t )dt为极小值。 2 0 解:令 x1 ( t ) = θ ( t ), x 2 ( t ) = ω ( t ),则系统的状态方程为
2
泛函J取极值的必要条件为 : d Fx − Fx & = 0 dt d Fu − Fu & = 0 dt & = Ax + bu x ⇔ & 1 = x2 ⎧x ⎨ &2 = u ⎩x ⇔ d ⎧ &1 = 0 ⎪ Fx1 − dt Fx ⎨ d ⎪ Fx − Fx &2 = 0 2 dt ⎩
x1 (0) = 1, x 2 (0) = 1 x1 (1) = 0, x 2 (1) = 0
*
⎡0 1⎤ ⎡ 0⎤ & = Ax + bu,A = ⎢ ,b = ⎢ ⎥ x ⎥ ⎣ 0 0⎦ ⎣1 ⎦ 引入待定拉格朗日乘子 λ ( t ),构造函数 1 2 & − Ax − bu) F = u ( t ) + λT ( t )( x 2 1 2 & 1 − x 2 ) + λ 2 ( t )( x & 2 − u) = u ( t ) + λ1 ( t )( x 2
3
由此得方程 & =0 ⎧ λ 1 ⎪λ & = −λ 2 1 ⎪ ⎪ ⎨u = λ2 ⎪x &1 = x2 ⎪ &2 = u ⎪ ⎩x 解得最优控制 u ( t ) = 18 t − 10
CH4泛函的条件极值问题

x1
的欧拉方程组
x1 x0
H x , y , z , y ', z ', x dx
d H H 0 y dx y ' H d H 0 z dx z '
2
y
x
0 x y' C1 2 2 1 y' z' x1 z' x dx C 2 2 2 x0 1 y' z' 2 z 1 x
11
泛函的条件极值问题
let ds 1 y '2 z '2 dx dy C1 ds x1 dz x dx C 2 ( x ) x 0 ds 1 x2 1 x2 dx dz x ds x x
2 1 C1 s C2
12
泛函的条件极值问题
例2 求在约束条件 下,泛函
dx u x dt
1 t1 2 2 J x t u dt t 0 2
的极值曲线。边界条件为x(0)=x0,x(t1)任意 解 作辅助函数 t
I
1
0 t1
1 2 2 2 x u t u x x dt H t , x , u, x , u dt
Gz 0
z x, y
G x, y, ( x, y) 0
从约束条件可确定一函数 使 由于所求曲线 位于曲面上
11.1泛函和泛函的极值-武汉大学数学物理方法
考虑:δ ∫ [ F ( x, y, y′) + λG ( x, y, y′)]dx = 0
a
b
则→
∂F ∂y
+λLeabharlann ∂G ∂y−d dx
[(
∂F ∂y ′
)+λ
d
dx ∂y ′
(
∂G
)] = 0
积分常数 C1 , C 2和λ可由附加条件定出
§11.1 泛函和泛函的极值
四.泛函的条件极值
1 ⎧ 2 ⎪ J [ y ( x )] = ∫ y ′ dx 0 ⎪ 1 ⎪ 2 例 2 .⎨ y dx = 1 ∫ ⎪ 0 ⎪ y ( 0 ) = 0, y (1 ) = 1 ⎪ ⎩
考虑
δ ∫ ( y′2 + λy 2 )dx = 0
0
1
不显含x, 也可推出一阶Euler方程, 此处直接用二阶Euler d 也不困难 : 2λy − (2 y′) = 0 dx
§11.1 泛函和泛函的极值
四.泛函的条件极值
即 : y′′ − λy = 0 y = C1e
λx
+ C2 e −
λx
§11.1 泛函和泛函的极值
二、泛函的极值
2.变分
(1) : 函数的变分 : 若 y ( x ) 微变 y ( x ) + t η ( x ), t为小参数 , 则记
δ ( y ) = tη ( x ) ( 2 ) — 称 tη ( x )为 y ( x )的变分 . 注意 : δ y 不同于 dy , dy 有一取极值过程 , δ y 不取
δ ( y ) → y ′( x )的变分
即: δ ( y ′) ≡
d dx
δ ( y)
有限元基础(泛函、变分与变分法)

因此
aT K a = aT K a
= aT( Ka - P ) = 0 由 a 的任意性,就得到(1.3.6)式:
Ka — P = 0
1.3.2 变分原理的建立
1.线性、自伴随微分算子
线性算子
具有以下性质的算子 L 称为线性算子
其中和是两个常数
内积
算子L(u)与任意函数v的 内积 定义为
则被积函数 (x) 在区间 a ≤x≤b 上必处处为零,即
1.3 变分原理和里兹方法
1.3.1 变分原理
变分原理定义
部分物理问题存在一个泛函: 而问题的解 u 使泛函取驻值,即 利用此式求解的方法称为变分法或变分原理
里兹(Ritz)法
选择试探函数:
其中N为已知函数,a为待定参数
代入泛函积分式,泛函变为普通实函数 令泛函变分为零
5. 变分法
求泛函极值的数学方法称为变分法。 泛函极值的必要条件: J = 0
充分条件:J = 0 且:2J >0 极小值 2J < 0 极大值
变分法基本预备定理:
设 (x) 是闭区间 a ≤x≤b 上的连续函数,y 是该区间上自变函数 y(x) 的变分,如果 y 在满足 约束条件的前提下任意变化时,下式始终成立
与以上微分提法相等效的伽辽金提法为
(1.3.21)
若算子L是线性、自伴随的,则有如下关系:
将其代入(1.3.21)式得
若令 则上式可表示为变分原理:
(1.3.23) 此处Π就是原问题的泛函,因为此泛函中u的最高 次为二次,所以是二次泛函。
3. 泛函的极值性
条件:
1.算子L是偶数(2m)阶的;
由于 y 与 y, y, , y(n) 无关,所以
最优控制汉密尔顿函数

这就是说,对定常系统,沿最优轨线H恒为常值。
整理课件
46
例4:给定系统状态方程为
x 00
1 0 0x1u
设初始状态x(0)= 0,终端状态约束曲线
x1(1)+x2(1)-1=0求使性能泛函
J 1 1u2tdt 20
取极小时的最优控制u*(t)及最优轨线x*(t)。
解 这是个终端时间tf给定,但终端状态受约束 的拉格朗日问题。
那么,关系式 H 0 不成立,这种情况留待极 u
小值原理中讨论。
式(5-12)称为横截条件。常用于补充边界条件。
例如,若始端固定,终态自由时,由于δx(t0)=0, δx(tf)任意,则有
xt0x0
(5-13)
tf 0
(5-14)
若始端和终端都固定时,δx(t0)=0,δx(tf)=0则以
xt0x0
J´的变分为:
J tt0 f x T H x u T H u d t x T
tf t0
使J´取极小的必要条件是,对任意的δu和δx,
都有δJ´=0成立。
因此得
H 0
x H x H 0 u
tf 0 t0
(5-9) (5-10) (5-11) (5-12)
终端时刻由下式计算
H x tf,u tf,tf,tf Φ x t tf f,tf N T x t t ff,tf 0
(5-32) 式中H[x(tf), u(tf), λ(tf), tf]函数H最优轨线终端处 的值。上述总共个2n+r+q+1方程,可联解出 2n+r+q+1个变量。
最后,分析哈密尔顿函数沿最优轨线随时间 的变化规律。哈密顿函数H对时间的全导数为
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
10-25 已知系统状态方程
控制约束 ,试确定最小时间控制 ,使系统由任意初始状态最快地转移到终端状态 .要求写出开关曲线方程 并画出 曲线的图形.
10-26 设系统状态方程
控制约束 ,目标集要求 ,试求使系统从初态 转移到目标集的最短时间 .
10-27 设线性时变系统状态方程为
10-45 设一阶非线性系统为
性能指标
若设
其中 待定.试用连续动态规划求最优控制 .
10-46 设系统状态方程
性能指标
试分别利用连续动态规划和调节器方法确定最优控制 .
10-47 对于线性时变系统
和有限时间性能指标
试用连续动态的方法证明:最优控制
和黎卡提方程
是成立的.
其中, 不受约束; 自由, 有限;对于 ,均连续、有界; .K(t)为非负定矩阵.
(2)如果使系统转移到 的终端时间 自由,问 应如何确定?
10-18 设二次积分模型为
性能指标
已知 自由,试求最优控制 和最优轨线 。Unknown
10-19 设系统状态方程
性能指标
要求达到 ,试求:
(1) 时的最优控制 ;
(2) 自由时的最优控制 .
10-20 设一阶系统方程
性能指标
已知x(1)=0.某工程师认为,从工程观点出发可取最优控制函数 =-1.试分析他的意见是否正确,并说明理由.
性能指标为
其中R(t)为正定对称矩阵,P为非负矩阵, 为非负对称矩阵, 为有限值.试确定最优控制律 .
10-28 设有一阶非线性系统
性能指标
试证哈密顿-雅可比方程按照 是线性的,按照 是二次的。
10-29 已知一阶系统
性能指标
试求最优控制 和最优性能指标 .
10-30 已知一阶系统
性能指标
求最优控制 .
10-40 一位公务员乘坐出租车要从机场赶到会场参加重要会议, 已知交通网络图如下图所示.图上数字为每条支路的驾驶时间,全部支路全是单行线. 试利用动态规划找出到达会场的最短时间路线.
10-41 设离散系统方程
性能指标
约束条件为:
试求作为x解析函数的最小代价函数J(x,k)和最优决策 .其中k=0,1,2.
10-37 对于离散状态调节器
性能指标
其中,u(k)无约束; .
10-38 试用离散极小值原理证明: 最优控制序列 为
Unknown
设离散系统状态差分方程
性能指标
试用离散动态规划求最优控制 ,最优轨线 和最优性能指标 .
10-39 在水管道建设中,基于水压的分部和布局方面的考虑,一组可能的管线图如下图所示.图中节点A、B、C、...、M的实际位置已由设计者确定, 节点之间链线上的箭头指示管道中水流方向,各链线上的数学表达该条链线的建设成本.试确定从A至M建设费用最低的管线走向.
10-31 设二阶系统如下图所示.试写出系统的可控标准型,并求使性能指标
为最小的最优控制 .其中,r和q为已知正常数, .
10-32 设一阶系统方程为
其性能指标为
其中a,b,α为常数,b和a非负.试求最优闭环系统特征值λ,并用图解法表示λ随a,b
和α变化时的情况.
10-33 试求下列黎卡提矩阵代数方程的正定解
求性能指标
在边界条件x(0)=0,x(1)自由情况下的极值曲线.
10-6 已知性能指标函数为
试求:(1) 的表达式;
(2)当 和 时的变分 和 的值.
10-7 试求下列性能指标的变分
10-8 试求泛函
在满足边界条件x(0)=1, 的极值曲线.
10-9 设泛函
端点 固定,端点 可沿空间曲线
移动.试证:当泛函取极值时,横截条件为
10-21 考虑下列二阶系统
控制结束为 ,要求最优控制 ,使系统在 时转移到 ,并使
其中 自由.
10-22 设一阶系统方程
控制约束 .性能指标
终端状态自由.试求 和 .
10-23 设一阶系统
边界条件为: .
性能指标
试确定最优控制 和最优轨线 .
10-24 设有二阶系统
控制约束 ,当系统终端自由时,求最优控制 ,使性能指标
已知 自由.
10-15 已知系统方程
约束条件
]
其中, ,要求选择 及 使性能泛函
极小,试确定极值的必要条件.
10-16 求使系统
由初态 出发,在 时转移到目标集: ,并使性能指标
为最小值的最优控制 及相应的最优轨线 .
10-17 已知一阶系统
(1)试确定最优控制 ,使系统在 时转移到x(2)=0,并使性能泛函
10-10 求性能泛函
在边界条件x(1)=1,x(2)=2时的极值曲线 和泛函极值 .
10-11 设系统状态方程
性能坐标
已知边界条件: .试求最优控制 和最优轨线 .
10-12已知状态方程
边界条件: .试求下列性能指标的极小值
10-13 求泛函
在满足边界条件 时的极值曲线。
10-14 求下列性能泛函的极值曲线
10-1 试求下列性能泛函达到极值的必要条件
给定边界条件为: 自由.
10-2 已知状态初值和终值为: 但自由,,试求试下列性能泛函达到极值的极值曲线
10-3 试利用变分公式
求泛函
的变分,并写出欧拉方程。
பைடு நூலகம்10-4 求通过x(0)=1,x(1)=2,使下列性能指标为极值的曲线
10-5 设x=x(t), ,求从x(0)=0到x(1)=1间的最短曲线.Unknown
式中
并设r和q为正常数,另设 .
10-34 设有二次积分模型
要求的性能指标为
试构造最优输出调节器,并求最优性能指标 。
10-35 设有时间跟踪系统
是完全可观的,其中 为确定性输入噪声向量.性能指标取为
其中z(t)为希望输出向量, .试用极小值原理的方法求最优控制 .
10-36 已知二阶离散系统
其中u(k)无约束.要求最优控制序列 ,使系统在2个采样周期内由初态x(0)转移到状态空间原点.
10-42 设离散系统方程
性能指标
其中,u(k)限取+1或-1.要求终端状态x(4)=2试求最优控制 和最优轨线 (k=0,1,2,3).
10-43 给定下列一阶离散系统
,
性能指标
试求最优控制序列 ,k=0,1,2,3和最小性能指标 .
10-44 设一阶离散系统
,
求使性能指标
为极小的最优控制 和最优轨线 .