PCL 学习笔记
PCL入门笔记

一、基本的语法1、关键字大小写不区分2、可以在PCL文件中定义一些变量。
Integer(整型),Real(实数),Logical(TRUE和FALSE),String定义变量格式如下:INTEGER i, j, status, NodeIds(1000) ##数组默认从1开始LOGICAL flagREAL xyz(1000, 3), pressure(100), timeGLOBAL STRING my_group[32], all_groups[32](100)还可以定义动态数组,如下:INTEGER node_ids(VIRTUAL)STRING groups[32](VIRTUAL), MyString[VIRTUAL] sys_allocate_array(node_i ds, 1, n ) #给动态数组分配内存sys_reallocate_array(node_i ds, 1, m ) #更改动态数组内存sys_free_array(node_ids ) #释放动态内存sys_allocate_string(picklist, 1000)sys_reallocate_string(picklist, 2000)sys_free_string(picklist)3、一些常规的语法:转行继续符:@分号分隔符:同C++:“;”注释多行:/*……*/注释单行:“#”或者“$”字符串连接符:// 如:”string1”//” string2”显示一行字符串可以用!,如:! `i` nodes created输出结果为:%27 nodes created计算表达式说明:用“`”(数字1键左边的那个键)例如:Angle:`360/5`,或者用WRITE(10+20)循环语句:for (rec = 1 to n)…………………………………end forWhile( i == 0 )…………………………………end whileREPEAT…………………………………UNTIL (i > NumNodes)BREAK跳出循环,continue跳过一次:If判断语句:IF( status != 0 ) THEN…………………………………ELSE…………………………………END IFSwitch判断语句:4、文件操作常用函数:text_open(FileName, Options, idum, idum, FileId) text_write(FileId, Format, Ints, Reals, Chars) text_write_string(FileId, OutString)text_read(FileId, Format, Ints, Reals, Chars)text_close(FileId, Options)打开文件:status = text_open( filen ame, “OR”, 0, 0, channel )#打开IF( status != 0 ) THENwrite(“Unable to open file “//filename)RETURN statusEND IFtext_close(channel, ““)#关闭写文件操作:file_build_fname(““,”records”, “out”, “NV”, filename)text_open(filename, “NOW”, 0, 0, channel)outst r = leading_text//” “//STR_FROM_INTEGER(rec)text_write_string(channel, outstr)text_close(channel, ““)读文件操作:Status=text_read_string( channel, record, lrecl ) ##将文件一行读到record中,如果到文件结尾,则返回1.5、一些常用的内部函数:sinr(angle)cosd(angle)mth_abs(MyVal)mth_sort(MyArray, CompactDuplicates, NumLeft)mth_array_search(MyArray, Look4, Sorted)str_length(MyString)str_substr(MyString, Position, SubStringLength)str_index(StringToSearchIn, StringToSearchFor)str_token(MyString, Delimiter, TokenNumber, [Compress])STR_FROM_INTEGER(MyFavoriteNumber) ###将整数变成字符串str_equal(GroupName1, GroupName2) ##区分大小写的字符串比较6、还可以直接调用Patran的内核函数(函数的功能可以参照手册,或者在patran中操作,然后查看相应的代码),如:db_count_nodes(NumNodes)db_get_node_ids(NumNodes, NodeIds)asm_const_grid_xyz(output_ids, coordinates_list, coord_frame,created_ids)7、输入输出输出到屏幕上:ui_writec("My favorite number is %d \n", MyFavoriteNumber) ##c语言的格式ui_writef("A21,1X,I3", "My favorite number is", MyFavoriteNumber) ##fortran的格式ui_write("My favorite number is "//STR_FROM_INTEGER(MyFavoriteNumber))二、命令流的保存和修改1、每次打开Patran时,都会在工作目录中产生一个后缀名是.ses的文件,在对Patran进行操作时所有的操作过程对应的代码都会记录在.ses文件中。
《点云库PCL学习教程》第4章-输入、输出(IO)

目录
点云库PCL简介 点云库PCL的输入方式 点云库PCL的输出方式 点云库PCL的输入输出示例
01
CHAPTER
点云库PCL简介
PCL(Point Cloud Library)起源于2005年,由美国国家仪器公司(National Instruments)的Kinect项目启动,旨在为三维点云处理提供一个开源的、跨平台的框架。
CHAPTER
点云库PCL的输入ห้องสมุดไป่ตู้出示例
VS
使用PCL库中的函数,如`pcl:io:loadPCDFile()`,可以读取存储在PCD文件中的点云数据。
保存点云数据
使用PCL库中的函数,如`pcl:io:savePCDFile()`,可以将点云数据保存到PCD文件中。
读取点云数据
读取和保存点云数据
PCL具有高效、可扩展和易用性强的特点,支持多种编程语言和平台,方便用户进行二次开发和定制。
PCL的主要功能和特点
PCL的应用领域
PCL在机器人、无人驾驶、智能制造、医疗影像分析等领域有着广泛的应用。
PCL可以帮助机器人实现环境感知、目标识别和路径规划等功能,提高机器人的智能化水平。
PCL还可以用于无人驾驶车辆的障碍物检测、道路识别和车辆定位等方面,提高无人驾驶的安全性和可靠性。
在导入其他软件或库中的点云数据时,需要注意数据的格式、单位以及数据的完整性等问题。
03
CHAPTER
点云库PCL的输出方式
使用PCL的PCDWriter类,可以将点云数据保存为PCD格式的文件,这是一种常见的点云数据格式。
PCL还支持将点云数据保存为多种其他文件格式,如PLY、VTK、X3D等,以满足不同软件和库的读取需求。
点云库PCL从入门到精通

《点云库PCL从入门到精通》这本书是一本非常值得一读的书籍,它不仅让 读者深入了解了点云库PCL的基础知识和算法原理,更重要的是为读者提供了一 个解决问题的有效途径。我相信这本书对于想要深入了解点云库PCL的读者来说, 一定会产生深远的影响。如果我要给这本书打分的话,我会给它5分。
目录分析
《点云库PCL从入门到精通》是一本全面介绍点云库PCL(Point Cloud Library)的教材,旨在帮助读者深入理解点云库PCL的基础知识、使用方法以及 应用领域。点云库PCL是一个开源的点云处理库,广泛应用于三维重建、机器人 导航、虚拟现实等领域。本书通过深入浅出的方式,指导读者如何使用点云库 PCL进行实际操作,同时提供了大量的应用案例供参考。
这本书的学习方向非常明确,能够帮助读者系统地掌握点云库PCL的核心概念、算法原理和应用 技巧。无论大家是从事机器人、三维视觉、还是无人驾驶等领域的工作,这本书都能够帮助大家 更好地理解和应用点云处理技术。如果大家正在寻找一本关于点云库PCL的经典著作,那么这本 书无疑是一个非常好的选择。
精彩摘录
《点云库PCL从入门到精通》是一本全面介绍点云库PCL(Point Cloud Library)的经典著作,由国防工业社于2018年。作者们用通俗易懂的语言,系 统地介绍了PCL的基础知识、使用方法和应用案例。这本书不仅适合初学者快速 上手,也适合有一定基础的读者深入学习。在本书中,我们将分享一些这本书中 的精彩摘录,以帮助大家更好地了解这本书。
算法原理:本书深入阐述了点云处理中的关键算法,包括点云生成、滤波、配准、分割、特征提 取等核心算法,方便读者掌握点云处理的基本原理和方法。
应用案例:本书通过丰富的应用案例,将理论知识与实践相结合,帮助读者更好地理解和应用所 学知识,提高解决实际问题的能力。
《点云库PCL学习教程》第5章 kd-tree
5.2 PCL中kd-tree模块及类介绍
PCL中kd-tree库提供了kd-tree数据结构,基于FLANN 进行快速最近邻检索。最近邻检索在匹配、特征 描述子计算、邻域特征提取中是非常基础的核心 操作。kd-tree模块利用三个类与两个函数实现了 利用kd-tree数据结构对点云的高效管理和检索, 其依赖于pcl_common模块。
纯虚函数,具体实现在其子类KdTreeFLANN中,其用来 进行r半径内的邻域搜索,参数p_q为需要查询的点, radius为需要查询的半径大小,k_indices为搜索完的邻 域点对应的索引,k_sqr_distances为搜索完的每个领 域点与查询点之间的欧式距离,max_nn为设置返回的 邻域个数上限,如果为0或者大于返回的领域个数, 其返回全部查询结果。
第5章 kd-tree
通过雷达、激光扫描、立体摄像机等三维测量设备获取 的点云数据,具有数据量大、分布不均匀等特点。作 为三维领域中一个重要的数据来源,点云数据主要是 表征目标表面的海量点集合,并不具备传统实体网格 数据的几何拓扑信息。所以点云数据处理中最为核心 的问题就是建立离散点间的拓扑关系,实现基于邻域 关系的快速查找。 本章首先对常用的点云空间索引方法kd-tree概念进行介 绍,然后对PCL的kd-tree相关模块及类进行简单说明, 最后通过应用实例来展示如何灵活应用PCL中kd-tree 模块。
图5-2 kd-tree模块中类的继承关系
类KdTree关键成员函数
KdTree(bool sorted=true)
空的构造函数
virtual void setInputCloud(const PointCloudConstPtr &cloud, const IndicesConstPtr& indices=IndicesConstPtr())
PCL程序笔记
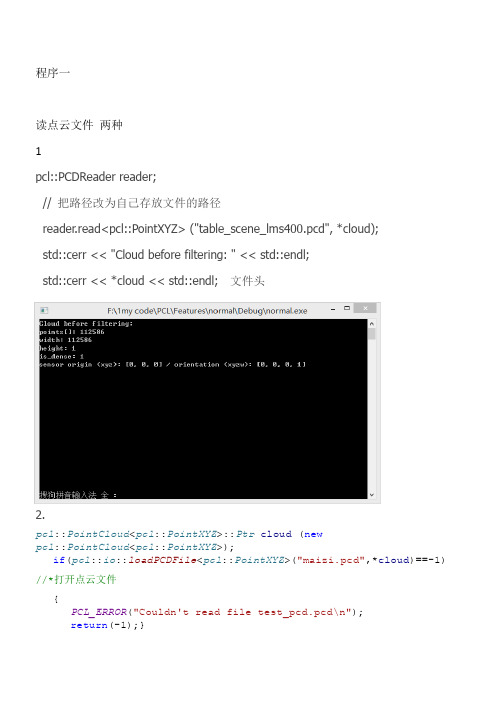
程序一读点云文件两种1pcl::PCDReader reader;// 把路径改为自己存放文件的路径reader.read<pcl::PointXYZ> ("table_scene_lms400.pcd", *cloud);std::cerr << "Cloud before filtering: " << std::endl;std::cerr << *cloud << std::endl; 文件头2.pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (newpcl::PointCloud<pcl::PointXYZ>);if(pcl::io::loadPCDFile<pcl::PointXYZ>("maizi.pcd",*cloud)==-1) //*打开点云文件{PCL_ERROR("Couldn't read file test_pcd.pcd\n");return(-1);}3,另存为pcl::PCDWriter writer;writer.write<pcl::PointXYZ> ("table_scene_lms400_inliers.pcd", *cloud_filtered, false);程序二创建可视化对象:两种boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer(new pcl::visualization::PCLVisualizer("3D Viewer"));pcl::visualization::PCLVisualizer viewer("3D Viewer");程序三可视化一个很功能完整的例程/* \author Geoffrey Biggs */#include<iostream>#include<boost/thread/thread.hpp>#include<pcl/common/common_headers.h>#include<pcl/common/common_headers.h>#include<pcl/features/normal_3d.h>#include<pcl/io/pcd_io.h>#include<pcl/visualization/pcl_visualizer.h>#include<pcl/console/parse.h>// 帮助voidprintUsage (const char* progName){std::cout << "\n\nUsage: "<<progName<<" [options]\n\n"<< "Options:\n"<< "-------------------------------------------\n"<< "-h this help\n"<< "-s Simple visualisation example\n"<< "-r RGB colour visualisation example\n"<< "-c Custom colour visualisation example\n"<< "-n Normals visualisation example\n"<< "-a Shapes visualisation example\n"<< "-v Viewports example\n"<< "-i Interaction Customization example\n"<< "\n\n";}boost::shared_ptr<pcl::visualization::PCLVisualizer> simpleVis (pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud){//创建3D窗口并添加点云boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);viewer->addPointCloud<pcl::PointXYZ> (cloud, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 1, "sample cloud");viewer->addCoordinateSystem (1.0);viewer->initCameraParameters ();return (viewer);}boost::shared_ptr<pcl::visualization::PCLVisualizer> rgbVis(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud){//创建3D窗口并添加点云boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZR GB> rgb(cloud);viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");//上面两行组合使用viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addCoordinateSystem (1.0);viewer->initCameraParameters ();return (viewer);}boost::shared_ptr<pcl::visualization::PCLVisualizer> customColourVis (pcl::PointCloud<pcl::PointXYZ>::ConstPtr cloud){//创建3D窗口并添加点云boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZ> single_color(cloud, 0, 255, 0);viewer->addPointCloud<pcl::PointXYZ> (cloud, single_color, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addCoordinateSystem (1.0);viewer->initCameraParameters ();return (viewer);}boost::shared_ptr<pcl::visualization::PCLVisualizer> normalsVis ( pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud,pcl::PointCloud<pcl::Normal>::ConstPtr normals){//创建3D窗口并添加点云其包括法线boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZR GB> rgb(cloud);viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals, 10, 0.05, "normals"); //每10个点显示一个法矢,长度5cmviewer->addCoordinateSystem (1.0);viewer->initCameraParameters ();return (viewer);}boost::shared_ptr<pcl::visualization::PCLVisualizer> shapesVis(pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud){//创建3D窗口并添加点云boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZR GB> rgb(cloud);viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud");viewer->addCoordinateSystem (1.0);viewer->initCameraParameters ();//在点云上添加直线和球体模型viewer->addLine<pcl::PointXYZRGB> (cloud->points[0],cloud->points[cloud->size() - 1], "line");viewer->addSphere (cloud->points[0], 0.2, 0.5, 0.5, 0.0, "sphere"); //球心,半径//在其他位置添加基于模型参数的平面及圆锥体pcl::ModelCoefficients coeffs;coeffs.values.push_back (0.0);coeffs.values.push_back (0.0);coeffs.values.push_back (1.0);coeffs.values.push_back (0.0);viewer->addPlane (coeffs, "plane");coeffs.values.clear ();coeffs.values.push_back (0.3);coeffs.values.push_back (0.3);coeffs.values.push_back (0.0);coeffs.values.push_back (0.0);coeffs.values.push_back (1.0);coeffs.values.push_back (0.0);coeffs.values.push_back (5.0);viewer->addCone (coeffs, "cone");return (viewer);}boost::shared_ptr<pcl::visualization::PCLVisualizer> viewportsVis ( pcl::PointCloud<pcl::PointXYZRGB>::ConstPtr cloud,pcl::PointCloud<pcl::Normal>::ConstPtr normals1,pcl::PointCloud<pcl::Normal>::ConstPtr normals2){// 创建3D窗口并添加显示点云其包括法线boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->initCameraParameters ();int v1(0);viewer->createViewPort(0.0, 0.0, 0.5, 1.0, v1);viewer->setBackgroundColor (0, 0, 0, v1);viewer->addText("Radius: 0.01", 10, 10, "v1 text", v1); // 字符串标签视口标签pcl::visualization::PointCloudColorHandlerRGBField<pcl::PointXYZR GB> rgb(cloud);viewer->addPointCloud<pcl::PointXYZRGB> (cloud, rgb, "sample cloud1", v1);int v2(0);viewer->createViewPort(0.5, 0.0, 1.0, 1.0, v2);viewer->setBackgroundColor (0.3, 0.3, 0.3, v2);viewer->addText("Radius: 0.1", 10, 10, "v2 text", v2);pcl::visualization::PointCloudColorHandlerCustom<pcl::PointXYZRGB> single_color(cloud, 0, 255, 0);viewer->addPointCloud<pcl::PointXYZRGB> (cloud, single_color, "sample cloud2", v2);viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud1");viewer->setPointCloudRenderingProperties(pcl::visualization::PCL_VISUALIZER_POINT_SIZE, 3, "sample cloud2");viewer->addCoordinateSystem (1.0);//坐标系统一,两者一起被操作viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals1, 10, 0.05, "normals1", v1);viewer->addPointCloudNormals<pcl::PointXYZRGB, pcl::Normal> (cloud, normals2, 10, 0.05, "normals2", v2);return (viewer);}unsigned int text_id = 0;void keyboardEventOccurred (const pcl::visualization::KeyboardEvent&event,void* viewer_void){boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer =*static_cast<boost::shared_ptr<pcl::visualization::PCLVisualizer> *> (viewer_void);if (event.getKeySym () == "r" && event.keyDown ()){std::cout << "r was pressed => removing all text" << std::endl;char str[512];for (unsigned int i = 0; i < text_id; ++i){sprintf (str, "text#%03d", i);viewer->removeShape (str);}text_id = 0;}}void mouseEventOccurred (const pcl::visualization::MouseEvent &event,void* viewer_void){boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer =*static_cast<boost::shared_ptr<pcl::visualization::PCLVisualizer> *> (viewer_void);if(event.getButton() == pcl::visualization::MouseEvent::LeftButton &&event.getType () ==pcl::visualization::MouseEvent::MouseButtonRelease){std::cout << "Left mouse button released at position (" << event.getX () << ", " << event.getY () << ")" << std::endl;char str[512];sprintf (str, "text#%03d", text_id ++);viewer->addText ("clicked here", event.getX (), event.getY (), str);}}boost::shared_ptr<pcl::visualization::PCLVisualizer> interactionCustomizationVis (){boost::shared_ptr<pcl::visualization::PCLVisualizer> viewer (new pcl::visualization::PCLVisualizer ("3D Viewer"));viewer->setBackgroundColor (0, 0, 0);viewer->addCoordinateSystem (1.0);viewer->registerKeyboardCallback (keyboardEventOccurred,(void*)&viewer); //第一个参数是回调函数,第二个是cookies 回调时传递给回调函数的参数viewer->registerMouseCallback(mouseEventOccurred, (void*)&viewer);return (viewer);}// -----Main-----intmain (int argc, char** argv){// 解析命令行参数if (pcl::console::find_argument (argc, argv, "-h") >= 0){printUsage (argv[0]);return 0;}bool simple(false), rgb(false), custom_c(false), normals(false), shapes(false), viewports(false),interaction_customization(false);if (pcl::console::find_argument (argc, argv, "-s") >= 0){simple = true;std::cout << "Simple visualisation example\n";}else if (pcl::console::find_argument (argc, argv, "-c") >= 0){custom_c = true;std::cout << "Custom colour visualisation example\n";}else if (pcl::console::find_argument (argc, argv, "-r") >= 0){rgb = true;std::cout << "RGB colour visualisation example\n";}else if (pcl::console::find_argument (argc, argv, "-n") >= 0) {normals = true;std::cout << "Normals visualisation example\n";}else if (pcl::console::find_argument (argc, argv, "-a") >= 0) {shapes = true;std::cout << "Shapes visualisation example\n";}else if (pcl::console::find_argument (argc, argv, "-v") >= 0) {viewports = true;std::cout << "Viewports example\n";}else if (pcl::console::find_argument (argc, argv, "-i") >= 0) {interaction_customization = true;std::cout << "Interaction Customization example\n";}else{printUsage (argv[0]);return 0;}// 自行创建一随机点云pcl::PointCloud<pcl::PointXYZ>::Ptr basic_cloud_ptr (new pcl::PointCloud<pcl::PointXYZ>);pcl::PointCloud<pcl::PointXYZRGB>::Ptr point_cloud_ptr (new pcl::PointCloud<pcl::PointXYZRGB>);std::cout << "Genarating example point clouds.\n\n";// 以椭圆为边线沿z轴拉伸获取其点云,并赋予红绿蓝渐变色。
PCL_学习笔记
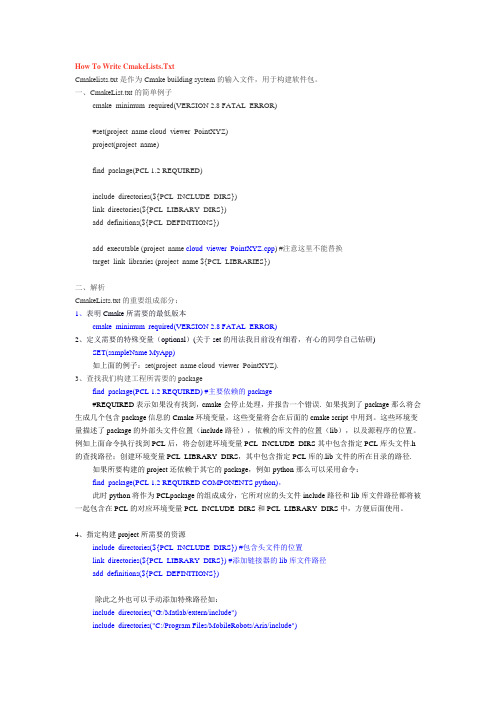
How To Write CmakeLists.TxtCmakelists.txt是作为Cmake building system的输入文件,用于构建软件包。
一、CmakeList.txt的简单例子cmake_minimum_required(VERSION 2.8 FATAL_ERROR)#set(project_namecloud_viewer_PointXYZ)project(project_name)find_package(PCL 1.2 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})link_directories(${PCL_LIBRARY_DIRS})add_definitions(${PCL_DEFINITIONS})add_executable (project_name cloud_viewer_PointXYZ.cpp) #注意这里不能替换target_link_libraries (project_name ${PCL_LIBRARIES})二、解析CmakeLists.txt的重要组成部分:1、表明Cmake所需要的最低版本cmake_minimum_required(VERSION 2.8 FATAL_ERROR)2、定义需要的特殊变量(optional)(关于set的用法我目前没有细看,有心的同学自己钻研)SET(sampleNameMyApp)如上面的例子:set(project_namecloud_viewer_PointXYZ).3、查找我们构建工程所需要的packagefind_package(PCL 1.2 REQUIRED) #主要依赖的package#REQUIRED表示如果没有找到,cmake会停止处理,并报告一个错误.如果找到了package那么将会生成几个包含package信息的Cmake环境变量,这些变量将会在后面的cmake script中用到。
《点云库PCL学习教程》第3章PCL基础
《点云库PCL学习教程》第3章PCL基础点云库(Point Cloud Library,PCL)是一个用于处理3D点云数据的开源库。
它提供了一系列的算法和工具,包括点云滤波、特征提取、拼接、配准、分割、识别等,可以帮助开发者快速而有效地处理点云数据。
在PCL中,点云是以PointCloud类的形式表示的,每个点云由一系列的点组成,每个点由3D坐标(x、y、z)和可能的其他属性(例如颜色、法向量等)组成。
本章主要介绍PCL库的基础知识,包括点云的读取与可视化、点云滤波、点云降采样等。
1.点云的读取与可视化:PCL支持多种格式的点云读取,包括PLY、PCD、OBJ等。
通过PointCloudReader类可以方便地从文件中读取点云数据。
读取后,可以使用PCLVisualizer类进行可视化展示,PCLVisualizer提供了丰富的接口,可以对点云进行旋转、缩放、着色等操作,方便开发者进行交互式的点云展示。
2.点云滤波:点云滤波可以去除噪声、平滑点云、提取感兴趣的区域等。
PCL提供了多种点云滤波算法,包括统计滤波、直通滤波、随机采样一致性滤波等。
这些滤波算法可以通过设置参数来调整滤波效果,从而达到预期的结果。
3.点云降采样:点云降采样可以减少点云的数量,提高点云处理的效率。
PCL提供了多种点云降采样算法,包括体素滤波、网格滤波、统计离散采样等。
这些算法可以根据需要对点云进行均匀或随机采样,从而得到所需的点云密度。
以上只是PCL库的基础功能介绍,实际上PCL还提供了更多的算法和工具,可以帮助开发者完成更复杂的点云处理任务。
同时,PCL也提供了丰富的文档和示例代码,方便开发者学习和应用。
总之,PCL是一个强大而灵活的点云处理库,可以广泛应用于机器人、计算机视觉、自动驾驶等领域。
希望通过本章的学习,读者能够掌握PCL库的基础知识,为后续的学习和应用打下基础。
PCL 学习笔记-推荐下载
PCIE学习笔记
PCIE学习笔记文档主要包括四个部分:1)Magwizard中例化模块的说明;2)内部结构;3)结合实际应用介绍应用层接口信号(我们主要帮客户解决这部分的问题,底层软件驱动部分由客户自己开发,Altera不负责支持);4)学习初期疑问及AE的解答。
PCI Express Compiler说明一〉system setting:1)Pcie core的类型:软核、硬核。
IVGX和2AGX包含硬核2)PHY type: 选择用不同的器件来实现,可以看到下面支持lane的数量的不同。
3)Port type: Native Endpoint是比较新的类型,支持MSI中断消息(推荐类型)。
LegacyEndpoint不支持。
Root point是源端,endpoint 是目的端。
4)Xcvr ref_clk: 设置reclk的输入时钟,可以在手册中清楚看到,对于不同的器件,输入参考时钟的区别。
5)Application Interface: 用于指定PCI Express中传输层和应用层的接口,如果用MegaWizard,建议采用Avalon-ST.6)Application clock: 指定应用的接口时钟,在选择硬核和软核时有区别。
7)Max rate: Gen1(2.5Gbps), Gen2(5.0Gbps)8)Test out width: 设置test_out的宽度,对于不同的核和lanes有不同的设置。
9)PCIe reconfig: 重配置硬核只读配置寄存器。
二〉PCI register1)BAR Type:主机以何种形式访问外部设备。
BAR的数量?2)参考设备管理器中/网络适配器/属性。
可以对应这些ID。
MSI消息中断,windows不支持,在Vista或linux中支持三〉Capabilities Parameters1)Tags supported 4-256设置支持non-posted 请求的tags数目。
《点云库PCL学习教程》第7章可视化
《点云库PCL学习教程》第7章可视化点云库(Point Cloud Library,PCL)是一个开源的点云处理库,用于处理3D点云数据。
在第7章《可视化》中,我们将学习如何使用PCL库进行点云数据的可视化处理。
下面是对该章节的详细介绍。
第7章主要介绍了点云数据的可视化处理。
在点云处理中,可视化是非常重要的一步,它可以帮助我们直观地了解点云数据的结构和特征,并进行数据的分析和处理。
首先,本章介绍了PCL库中用于可视化的相关类和方法。
PCL提供了可视化窗口类(visualization::PCLVisualizer),它可以创建一个窗口并在其中显示点云数据。
这个类中提供了许多用于设置可视化参数的方法,比如设置窗口标题、窗口大小、背景色等。
同时,它还提供了一些用于添加和显示点云数据的方法,比如添加点云、添加几何体、添加坐标系等。
通过调用这些方法,我们可以将点云数据以及其他的几何体可视化出来。
接着,本章介绍了如何使用PCL可视化窗口类来进行简单的点云数据可视化。
首先,我们需要创建一个可视化窗口对象,并设置窗口的一些参数。
然后,我们可以通过添加点云数据和其他的几何体来显示在可视化窗口中。
通过调整可视化窗口的参数,比如旋转、缩放、平移等,我们可以更好地观察点云数据的细节。
另外,PCL还提供了一些和键盘、鼠标交互相关的事件响应方法,我们可以通过重写这些方法来实现一些交互操作,比如点选、框选、拖拽等。
最后,本章还介绍了如何保存可视化窗口中的点云数据和截图。
PCL提供了将点云数据保存为.ply文件的方法,我们可以通过调用这个方法将可视化窗口中的点云数据保存到本地。
此外,我们还可以使用一个保存截图的方法将窗口中的图像保存为.jpg或.png格式的图片。
在本章中,我们通过实例代码和详细的解释,学习了如何使用PCL库进行点云数据的可视化处理。
通过这些方法和技巧,我们可以更加灵活地进行点云数据的可视化,并进一步进行点云数据的分析和处理。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
How To Write CmakeLists.TxtCmakelists.txt是作为Cmake building system的输入文件,用于构建软件包。
一、CmakeList.txt的简单例子cmake_minimum_required(VERSION 2.8 FATAL_ERROR)#set(project_name cloud_viewer_PointXYZ)project(project_name)find_package(PCL 1.2 REQUIRED)include_directories(${PCL_INCLUDE_DIRS})link_directories(${PCL_LIBRARY_DIRS})add_definitions(${PCL_DEFINITIONS})add_executable (project_name cloud_viewer_PointXYZ.cpp) #注意这里不能替换target_link_libraries (project_name ${PCL_LIBRARIES})二、解析CmakeLists.txt的重要组成部分:1、表明Cmake所需要的最低版本cmake_minimum_required(VERSION 2.8 FATAL_ERROR)2、定义需要的特殊变量(optional)(关于set的用法我目前没有细看,有心的同学自己钻研)SET(sampleName MyApp)如上面的例子:set(project_name cloud_viewer_PointXYZ).3、查找我们构建工程所需要的packagefind_package(PCL 1.2 REQUIRED) #主要依赖的package#REQUIRED表示如果没有找到,cmake会停止处理,并报告一个错误. 如果找到了package 那么将会生成几个包含package信息的Cmake环境变量,这些变量将会在后面的cmake script中用到。
这些环境变量描述了package的外部头文件位置(include路径),依赖的库文件的位置(lib),以及源程序的位置。
例如上面命令执行找到PCL后,将会创建环境变量PCL_INCLUDE_DIRS 其中包含指定PCL库头文件.h的查找路径;创建环境变量PCL_LIBRARY_DIRS,其中包含指定PCL库的.lib文件的所在目录的路径.如果所要构建的project还依赖于其它的package,例如python那么可以采用命令:find_package(PCL 1.2 REQUIRED COMPONENTS python),此时python将作为PCLpackage的组成成分,它所对应的头文件include路径和lib库文件路径都将被一起包含在PCL的对应环境变量PCL_INCLUDE_DIRS和PCL_LIBRARY_DIRS中,方便后面使用。
4、指定构建project所需要的资源include_directories(${PCL_INCLUDE_DIRS}) #包含头文件的位置link_directories(${PCL_LIBRARY_DIRS}) #添加链接器的lib库文件路径add_definitions(${PCL_DEFINITIONS})除此之外也可以手动添加特殊路径如:include_directories("G:/Matlab/extern/include")include_directories("C:/Program Files/MobileRobots/Aria/include")link_directories("G:/Matlab/extern/lib/win32/microsoft")link_directories("C:/Program Files/MobileRobots/Aria/lib")5、从指定源文件构建可执行文件add_executable (project_name cloud_viewer_PointXYZ.cpp)该命令将从源文件cloud_viewer_PointXYZ.cpp构建可执行程序project_name.exe.如果从多个源文件构建可执行程序则可以表示成:add_executable (project_name main.cpp test1.cpp test2.cpp)add_executable (project_name main.cpp part.h grab.h interface.h test.cpp test.h)6、为project构建libraryadd_library(${project_name} ${${project_name}_src}) #默认创建共享library7、指定可执行文件需要连接的库target_link_libraries (project_name ${PCL_LIBRARIES})#前一个参数为可执行文件的名字target_link_libraries (project_name ${PCL_LIBRARIES} libeng.lib libmx.lib libmex.lib libmat.lib Aria.lib winmm.lib wsock32.lib)TARGET_LINK_LIBRARIES(${project_name}${MRPT_LIBS} # This is filled by FIND_PACKAGE(MRPT ...)"" # Optional extra libs...)三、利用Cmake来构建程序基本的CmakeLists.txt已经写好,那么接下来就是:1、新建一个文件夹source, 如:F:\study\program_software\VC++program\PCL\PCL_study\cloud_viewer_PointXYZ\source将CmakeLists.txt, 所有的自己编写的源文件(.c or .cpp)以及头文件(.h) 放在该文件夹下。
2、再在与source同目录的文件加下建一个新的文件夹cmake-bin,如:F:\study\program_software\VC++ program\PCL\PCL_study\cloud_viewer_PointXYZ\cmake-bin 该文件将用来放置构建的project。
3、打开Cmake软件界面及设置如下:4、先点击配置configure,此时可能会报错如Could not copy from: C:/Program Files/CMake 2.8.12.2/share/cmake-2.8/Templates/CMakeVSMacros2.vsmacros to: d:/用户目录/Documents/VisualStudio 010/Projects/VSMacros80/CMakeMacros/CMakeVSMacros2.vsmacros的红色字样警告,因为这是系统用户的路径名有中文字符“用户目录”造成的,因为cmake不认中文路径,但是只要我们在上面的第三步中设置生成的路径中没有中文就行了。
就算有这个因为C:/Users/下有中文照成的错误,也对我们这次的生成无碍,不用去管他。
再点击一次configure时会快速完成配置。
最后出现configuring done。
5、点击generate当看到generating done时,说明生成成功了。
此时在cmake-bin文件夹下生成如下内容:6、打开Proj_Name.sln将Proj_Name设置成启动项7、开始debug但是在运行时很可能出现错误:fatal error LNK1104: 无法打开文件“C:\Qt\4.8.0\lib\QtGuid4.lib”,这主要是因为VTK库里面依赖函数的关系不对应,我的QT版本是Qt5.2.1所以必须修改这些依赖函数。
解决方法是打开路径C:\Program Files\PCL 1.6.0\3rdParty\VTK\lib\vtk-5.8下的三个文件:VTKConfigQt.cmakeVTKTargets-debug.cmakeVTKTargets-release.cmake将其中的路径C:\Qt\4.8.0替换成你现有版本的Qt路径,例如我的是:C:\Qt\Qt5.2.1\5.2.1\msvc2010_opengl,(当然也可以将这个路径定义为环境变量$(QT_ROOT));然后将对应的库文件如QtGuid4.lib替换成你自己安装的Qt版本的库文件如Qt5Guid.lib,最终即可正常运行。
8、正常运行,结果如下:9、源程序和3D点云:cloud_viewer_PointXYZ.cpp如下:#include <pcl/visualization/cloud_viewer.h>#include <iostream>#include <pcl/io/io.h>#include <pcl/io/pcd_io.h>int user_data;voidviewerOneOff (pcl::visualization::PCLVisualizer& viewer) {viewer.setBackgroundColor (1.0, 0.5, 1.0);pcl::PointXYZ o;o.x = 1.0;o.y = 0;o.z = 0;viewer.addSphere (o, 0.25, "sphere", 0);std::cout << "i only run once" << std::endl;}voidviewerPsycho (pcl::visualization::PCLVisualizer& viewer) {static unsigned count = 0;std::stringstream ss;ss << "Once per viewer loop: " << count++;viewer.removeShape ("text", 0);viewer.addText (ss.str(), 200, 300, "text", 0);//可¨¦以°?注Á¡é释º¨ª掉Ì?这a行D,ê?此ä?时º¡À不?会¨¢再¨´显?示º?图ª?形?中D显?示º?Once per viewer loop:num一°?直¡À增?加¨®//FIXME: possible race condition here:user_data++;}intmain (){pcl::PointCloud<pcl::PointXYZ>::Ptr cloud (new pcl::PointCloud<pcl::PointXYZ>); //modified pcl::io::loadPCDFile ("point_cloud_XYZ.pcd", *cloud);pcl::visualization::CloudViewer viewer("Cloud Viewer");//blocks until the cloud is actually renderedviewer.showCloud(cloud);//use the following functions to get access to the underlying more advanced/powerful//PCLVisualizer//This will only get called onceviewer.runOnVisualizationThreadOnce (viewerOneOff);//This will get called once per visualization iterationviewer.runOnVisualizationThread (viewerPsycho);while (!viewer.wasStopped ()){//you can also do cool processing here//FIXME: Note that this is running in a separate thread from viewerPsycho//and you should guard against race conditions yourself...user_data++;}return 0;}二、激光扫描仪;立体摄像机和飞行摄像机获得的点云数据是有序点云数据,类似于图像或矩阵的结构,数据分为行和列;它相比于无序点云的优点在于预先了解相邻点的关系,邻域操作更加高效。