大学物理实验用三线摆法测定物体的转动惯量
大学物理实验 报告实验3 三线摆报告

v1.0 可编辑可修改三线摆实验报告林一仙 一、实验目的1、掌握水平调节与时间测量方法;2、掌握三线摆测定物体转动惯量的方法;3、掌握利用公式法测这定物体的转动惯量。
二、实验仪器三线摆装置 电子秒表 卡尺 米尺 水平器 三、实验原理1、三线摆法测定物体的转动惯量机械能守恒定律:ω2021I mgh =简谐振动:t Tπθθ2sin 0= t TT dt d ππθθω2cos 20==通过平衡位置的瞬时角速度的大小为:T02πθω=; 所以有:⎪⎭⎫⎝⎛=T I mgh 021220πθ根据图1可以得到:()()1212!BC BC BC BC BC BC h +-=-=()()()()22222r R l AC AB BC --=-=从图2可以看到:根据余弦定律可得()()022211cos 2θRr r R C A -+=所以有:()()()()02222112121cos 2θRr r R l C A B A BC -+-=-=整理后可得:12102sin 4)cos 1(2BC BC Rr BC BC Rr h +=+-=θθ H BC BC 21≈+;摆角很小时有:2)2sin(00θθ=所以:HRr h 220θ=整理得:2204T H mgRr I π=;又因3b R =,3a r = 所以:22012T Hmgab I π=若其上放置圆环,并且使其转轴与悬盘中心重合,重新测出摆动周期为T 1和H 1则:2112112)(T H gab M m I π+=待测物的转动惯量为: I= I 1-I 02、公式法测定物体的转动惯量 圆环的转动惯量为:()D D MI 222181+=四、实验内容1、三线摆法测定圆环绕中心轴的转动惯量a 、用卡尺分别测定三线摆上下盘悬挂点间的距离a 、b (三个边各测一次再平均); b 、调节三线摆的悬线使悬盘到上盘之间的距离H 大约50cm 多;c 、调节三线摆地脚螺丝使上盘水平后再调节三线摆悬线的长度使悬盘水平;d 、用米尺测定悬盘到上盘三线接点的距离H ;e 、让悬盘静止后轻拨上盘使悬盘作小角度摆动(注意观察其摆幅是否小于10度,摆动是否稳定不摇晃。
大学物理试验用三线摆测量刚体的转动惯量

量动的转惯线用三摆测量刚体验实七【实验目的】学会正确测量长度、质量和时间。
1.。
2. 学习用三线摆测量圆盘和圆环绕对称轴的转动惯量【实验器材】三线摆仪、米尺、游标卡尺、数字毫秒计、气泡水平仪、物理天平和待测圆环等。
【实验原理】转动惯量是刚体转动时惯性大小的量度,它与刚体的质量分布和转轴的位置有关。
对于质量分布均匀、外形不复杂的刚体,测出其外形尺寸及质量,就可以计算其转动惯量就难以计算,而对于外形复杂、质量分布不均匀的刚体,出其转动惯量;通常利用转动实验来测定。
三线摆就是测量刚体转动惯量的基本方法之一。
是三线摆实验装置示意图。
三线摆是由上、下两个匀质圆盘,用三条等长1图下圆盘的系线点构成等边三角形,连接而成。
(摆线为不易拉伸的细线)上、的摆线三线摆实验装置示意图图1图2 三线摆原理图称为摆盘。
由于三线摆的摆动周OO下盘处于悬挂状态,‘轴线作扭转摆动,并可绕.期与摆盘的转动惯量有一定关系,所以把待测样品放在摆盘上后,三线摆系统的摆动周期就要相应的随之改变。
这样,根据摆动周期、摆动质量以及有关的参量,就能求出摆盘系统的转动惯量。
',时,当它绕OO圆盘的中心位置升高扭转的最大角位移为设下圆盘质量为,?h m o0这时圆盘的动能全部转变为重力势能,有:(为重力加速度)g gh?mE0P,重力势能被当下盘重新回到平衡位置时,重心降到最低点,这时最大角速度为?0全部转变为动能,有:‘是下圆盘对于通过其重心且垂直于盘面的式中OO 轴的转动惯量。
I0如果忽略摩擦力,根据机械能守恒定律可得:12)(1 ?Imgh?0002从上圆盘时,R,当下圆盘转过一角度设悬线长度为,下圆盘悬线距圆心为l?00h所示,则:,如图2前、后下圆盘分别交于C和CB点作下圆盘垂线,与升高122222因为)(R(AC)???r(BC)(?AB)???20sinRr4?)cosRr(1?22所以0??hBCBCBC?BC?11?? 2H,其中,而BC+BC?很小,摆长在扭转角很长时,sin?00l?102222 H=)R?rl?(式中H为上下两盘之间的垂直距离,则2?Rr0(2)?h H2由于下盘的扭转角度很小(一般在5度以内),摆动可看作是简谐振动。
三线摆测转动惯量实验报告

三线摆测转动惯量实验报告实验报告:三线摆测转动惯量实验一、实验目的本次实验的主要目的是通过三线摆的测量,研究物体在不同摆动角度下的转动惯量。
转动惯量是描述物体旋转特性的一个重要参数,对于理解物体的运动规律和动力学性能具有重要意义。
二、实验原理1. 三线摆的构造三线摆是由三条相互垂直的细线组成,其中两条细线固定在同一端点,另一条细线则通过一个支点悬挂。
当三线摆摆动时,细线的张力会产生扭矩,使得摆锤绕支点旋转。
2. 转动惯量的计算公式转动惯量的计算公式为:I = m * r^2,其中m为物体的质量,r为物体的半径。
在本实验中,我们将通过测量三线摆在不同摆动角度下的周期和角速度,从而求得物体的转动惯量。
三、实验步骤与结果分析1. 实验准备(1) 准备三线摆、计时器、直尺等实验工具。
(2) 将三线摆调整至水平状态,使两条细线的夹角为90°。
(3) 在三线摆的一端挂上质量为m的小球。
(4) 将三线摆调整至合适的初始位置,使其摆动幅度较小。
2. 实验过程与数据记录(1) 以一定的时间间隔记录三线摆的周期T;(2) 以一定的时间间隔记录三线摆的角速度ω。
(3) 根据公式I = 2π/T * ω^2 * r,计算出小球的转动惯量I;(4) 重复以上步骤,分别测量三线摆在不同摆动角度下的数据。
3. 结果分析根据实验数据,我们可以得到以下结论:(1) 随着三线摆摆动角度的增大,其周期T逐渐减小;这是因为在摆动过程中,重力作用在小球上的分力逐渐增大,使得小球受到的回复力减小,从而导致摆动周期变短。
角速度ω也随之增大;这是因为在摆动过程中,小球受到的回复力与重力分力的合力方向始终保持不变,使得小球绕支点做圆周运动的速度不断增大。
因此,我们可以得出结论:物体在不同摆动角度下的转动惯量与其固有属性有关。
《用三线摆法测定物体的转动惯量》简明实验报告
《用三线摆法测定物体的转动惯量》简明实验报告实验目的:通过使用三线摆法,测定不同物体的转动惯量,并探究物体质量、几何形状及质心位置对转动惯量的影响。
实验原理:转动惯量是描述物体转动惯性的物理量,表示了物体对转动所表现出的惯性大小。
对于一个质量为m、质心到转轴距离为r的物体,其转动惯量可以通过以下公式计算得出:I=m*r^2而对于一个不规则形状的物体,可以通过将其分解为一组质点,然后分别计算每个质点的转动惯量,并将其求和来得到总转动惯量:I=∑(m_i*r_i^2)在使用三线摆法进行测量时,需要固定物体在转轴上,并通过三根细线将物体悬挂起来。
当物体开始转动时,通过测量物体的摆动周期T和细线长度L,可以利用以下公式计算出转动惯量:I=(T^2*m*g*L)/(4π^2)实验装置:1.一个三线摆装置2.不同形状、不同质量的物体(如圆环、长方体、球体等)3.量角器4.绳子5.计时器6.秤实验步骤:1.将三线摆装置固定在桌面上,并调整好其水平度。
2.选择一个物体,将其通过一根细线绑在摆装置上,并调整好细线的长度,使得物体可以自由摆动。
3.将量角器放在与物体摆动平面垂直的位置,用来测量摆动的振幅角。
4.将绳子固定在物体上,并通过一张纸卡片保持绳子长度不变。
这样可以控制绳子长度的一致性。
5.用计时器测量物体的摆动周期T,反复测量多次以取得平均值。
6.用秤测量物体的质量m,并记录下来。
7.将摆装置往一侧推动,观察物体的摆动情况。
如果摆动不稳定,要重新调整摆装置和细线的位置。
8.重复步骤2-7,测量其他不同形状、不同质量的物体。
实验结果:根据测量得到的摆动周期T、细线长度L、质量m以及重力加速度g,可以计算出物体的转动惯量I。
将测量结果整理成表格,并绘制转动惯量与物体质量、几何形状及质心位置的关系图。
实验讨论:通过实验结果可以看出,质量、几何形状及质心位置都对物体的转动惯量有影响。
质量越大的物体,其转动惯量也越大;几何形状越复杂的物体,其转动惯量也越大;质心离转轴越远的物体,其转动惯量也越大。
用三线摆法测定物体的转动惯量
三线摆法测试物体的转动惯量引言转动惯量是刚体转动惯性大小的量度,是表征刚体特性的一个物理量。
转动惯量的大小除与物体质量有关外,还与转轴的位置和质量分布(即形状、大小和密度)有关。
如果刚体形状简单,且质量分布均匀,可直接计算出它绕特定轴的转动惯量。
但在工程实践中,我们常碰到大量形状复杂,且质量分布不均匀刚体,理论计算将极为复杂,通常采用实验方法来测定。
转动惯量的测量,一般都是使刚体以一定的形式运动。
通过表征这种运动特征的物理量与转动惯量之间的关系,进行转换测量。
测量刚体转动惯量的方法有多种,三线摆法是具有较好物理思想的实验方法,它具有设备简单、直观、测试方便等优点。
【一】实验目的1.学会用三线摆测定物体的转动惯量。
2.学会用累积放大法测量周期运动的周期。
3.验证转动惯量的平行轴定理。
【二】实验仪器及使用方法三线摆、水准仪、停表、米尺、游标卡尺、物理天平以及待测物体等。
1. DH 4601转动惯量测试仪 1台 2. 实验机架 1套 3. 圆环 1块 4. 圆柱体 2个仪器操作1. 打开电源,程序预置周期为T=30(数显),即:小球来回经过光电门的次数为T=2n+1次。
2. 据具体要求,若要设置50次,先按“置数”开锁,再按上调(或下调)改变周期T ,再按“置数”锁定,此时,即可按执行键开始计时,信号灯不停闪烁,即为计时状态,当物体经过光电门的周期次数达到设定值,数显将显示具体时间,单位“秒”。
须再执行“50”周期时,无须重设置,只要按“返回”即可回到上次刚执行的周期数“50”,再按“执行”键,便可以第二次计时。
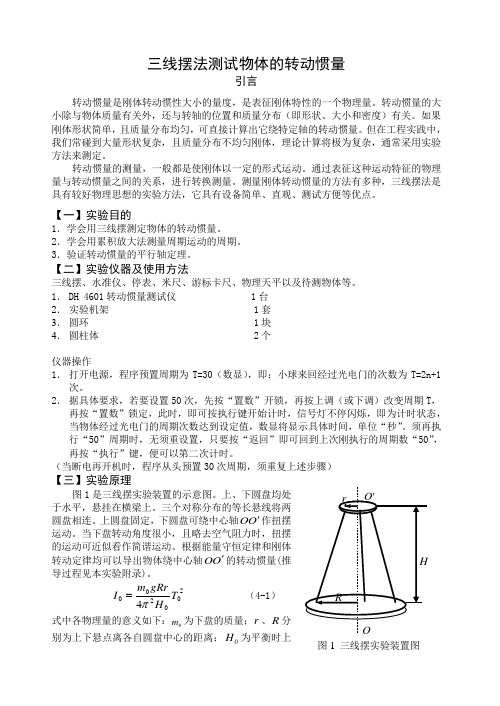
(当断电再开机时,程序从头预置30次周期,须重复上述步骤)【三】实验原理图1是三线摆实验装置的示意图。
上、下圆盘均处于水平,悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆盘固定,下圆盘可绕中心轴O O '作扭摆运动。
当下盘转动角度很小,且略去空气阻力时,扭摆的运动可近似看作简谐运动。
三线摆法测定物体的转动惯量
三线摆法测试物体的转动惯量【一】实验目的1. 学会用三线摆测定物体的转动惯量。
2. 学会用累积放大法测量周期运动的周期。
3. 验证转动惯量的平行轴定理。
【二】实验仪器及使用方法三线摆、水准仪、停表、米尺、游标卡尺、物理天平以及待测物体等。
1. DH 4601转动惯量测试仪 1台 2. 实验机架 1套 3. 圆环 1块 4. 圆柱体 2个仪器操作打开电源, 程序预置周期为T=30(数显), 即: 小球来回经过光电门的次数为T=2n+1次。
据具体要求, 若要设置50次, 先按“置数”开锁, 再按上调(或下调)改变周期T, 再按“置数”锁定, 此时, 即可按执行键开始计时, 信号灯不停闪烁, 即为计时状态, 当物体经过光电门的周期次数达到设定值, 数显将显示具体时间, 单位“秒”。
须再执行“50”周期时, 无须重设置, 只要按“返回”即可回到上次刚执行的周期数“50”, 再按“执行”键, 便可以第二次计时。
(当断电再开机时, 程序从头预置30次周期, 须重复上述步骤)【三】实验原理图1是三线摆实验装置的示意图。
上、下圆盘均处于水平, 悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆盘固定, 下圆盘可绕中心轴作扭摆运动。
当下盘转动角度很小, 且略去空气阻力时, 扭摆的运动可近似看作简谐运动。
根据能量守恒定律和刚体转动定律均可以导出物体绕中心轴的转动惯量(推导过程见本实验附录)。
2002004T H gRr m I π=(4-1) 式中各物理量的意义如下: 为下盘的质量;、分别为上下悬点离各自圆盘中心的距离;为平衡时上下盘间的垂直距离;为下盘作简谐运动的周期, 为重力加速度(在杭州地区)。
将质量为的待测物体放在下盘上, 并使待测刚体的转轴与轴重合。
测出此时摆运动周期和上下圆盘间的垂直距离。
同理可求得待测刚体和下圆盘对中心转轴轴的总转动惯量为: 212014)(T HgRr m m I π+=(4-2) 如不计因重量变化而引起悬线伸长, 则有。
「三线摆法测量物体的转动惯量」

广 东 海 洋 大 学 学 生 实 样 报 告实验名称 课程名称 物理实验 成绩学院 职业技术学院 专业 数控技术 班级 091学生姓名学号 实验地点实验日期三线摆法测定物体的转动惯量【实验目的及要求】1. 学会用三线摆测量物体的转动惯量.2. 学会基本仪器的使用方法.3. 验证转动惯量的平行轴定理.【实验原理】三线摆的上、下圆盘均处于水平,悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆盘固定,下圆盘可绕中心轴O O '作扭摆运动。
当下盘转动角度很小,且略去空气阻力时,扭摆的运动可近似看作简谐运动。
根据能量守恒定律和刚体转动定律均可以导出物体绕中心轴O O '的转动惯量(推导过程见本实验附录)。
2002004T H gRr m I π= (1) 式中各物理量的意义如下:0m 为下盘的质量;r 、R 分别为上下悬点离各自圆盘中心的距离;0H 为平衡时上下盘间的垂直距离;T 0为下盘作简谐运动的周期,g 为重力加速度将质量为m 的待测物体放在下盘上,并使待测刚体的转轴与O O '轴重合。
测出此时下盘运动周期1T 和上下圆盘间的垂直距离H 。
同理可求得待测刚体和下圆盘对中心转轴O O '轴的总转动惯量为:212014)(T HgRr m m I π+=(2) 如不计因重量变化而引起的悬线伸长, 则有0H H ≈。
那么,待测物体绕中心轴O O '的转动惯量为: ])[(4200210201T m T m m H gRr I I I -+π=-= (3) 因此,通过长度、质量和时间的测量,便可求出刚体绕某轴的转动惯量。
用三线摆法还可以验证平行轴定理。
若质量为m 的物体绕过其质心轴的转动惯量为c I ,当转轴平行移动距离x 时,则此物体对新轴O O '的转动惯量为2'mx I I c oo +=。
这一结论称为转动惯量的平行轴定理。
实验时将质量均为m',形状和质量分布完全相同的两个圆柱体对称地放置在下圆盘上(下盘有对称的两排小孔)。
大学物理实验-用三线摆法测定物体的转动惯量
大学物理实验-用三线摆法测定物体的转动惯量用三线摆法测定物体的转动惯量转动惯量是刚体在转动中惯性大小的量度,它与刚体的总质量、形状大小、密度分布和转轴的位置有关。
对于形状较简单的刚体,可以通过数学方法算出它绕特定轴的转动惯量。
但是,对于形状较复杂的刚体,用数学方法计算它的转动惯量非常困难,大都用实验方法测定。
例如:机械零部件、电机转子及枪炮弹丸等。
因此学会刚体转动惯量的测定方法,具有重要的实际意义。
测量转动惯量,一般是使刚体以一定形式运动,通过表征这种运动特征的物理量与转动惯量的关系,进行转换测量。
常用的测量方法有三线扭摆法、单线扭摆法、塔轮法等。
本实验采用三线扭摆法,由摆动周期及其他参数的测定计算出物体的转动惯量。
为了便于和理论值进行比较,实验中的被测物体一般采用形状规则的物体。
【实验目的】1、掌握三线扭摆法测量物体转动惯量的原理和方法;2、研究物体的转动惯量与其质量、形状(密度均匀时)及转轴位置的关系;3、学会正确测量长度、质量和时间的方法。
【实验仪器】FB210型三线摆转动惯量测定仪、游标卡尺、钢卷尺、数字毫秒计、物理天平、待测物体等。
【实验原理】图1是三线摆实验装置的示意图。
上、下圆盘均处于水平,悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆盘固定,下圆盘可绕中心轴O O '作扭摆运动。
当下盘转动角度很小,且略去空气阻力时,扭摆的运动可近似看作简谐运动。
根据能量守恒定律和刚体转动定律均可以导出物体绕中心轴O O '的转动惯量(推导过程见本实验附录)。
202004T H gRr m I π= (1) 式中各物理量的意义如下:0m 为下盘的质量;r 、R 分别为上下悬点离各自圆盘中心的距离;0H 为平衡时上下盘间的垂直距离;T 0为下盘作简谐运动的周期,g 为重力加速度(在杭州地区g =9.793m/s 2)。
图1三线摆实验装置图将质量为m 的待测物体放在下盘上,并使待测刚体的转轴与O O '轴重合。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
用三线摆法测定物体的转动惯量
转动惯量是刚体在转动中惯性大小的量度,
它与刚体的总质量、形状大小、密度分布和
转轴的位置有关。
对于形状较简单的刚体,可以通过数学方法算出它绕特定轴的转动惯量。
但是,对于形状较复杂的刚体,用数学方法计算它的转动惯量非常困难,
大都用实验方法测
定。
例如:机械零部件、电机转子及枪炮弹丸等。
因此学会刚体转动惯量的测定方法,具有 重要的实际意义。
测量转动惯量,一般是使刚体以一定形式运动,
通过表征这种运动特征的物理量与转动
惯量的关系,进行转换测量。
常用的测量方法有三线扭摆法、单线扭摆法、塔轮法等。
本实 验采用三线扭摆法,由摆动周期及其他参数的测定计算出物体的转动惯量。
为了便于和理论
值进行比较,实验中的被测物体一般采用形状规则的物体。
【实验目的】
1、 掌握三线扭摆法测量物体转动惯量的原理和方法;
2、 研究物体的转动惯量与其质量、形状(密度均匀时)及转轴位置的关系;
3、 学会正确测量长度、质量和时间的方法。
【实验仪器】
FB210型三线摆转动惯量测定仪、游标卡尺、钢卷尺、数字毫秒计、物理天平、待测物 体等。
【实验原理】
图1是三线摆实验装置的示意图。
上、下圆盘均处于水平, 悬挂在横梁上。
三个对称分布的等长悬线将两圆盘相连。
上圆 盘固定,下圆盘可绕中心轴
00作扭摆运动。
当下盘转动角度
很小,且略去空气阻力时,扭摆的运动可近似看作简谐运动。
根据能量守恒定律和刚体转动定律均可以导出物体绕中心轴 00的转动惯量(推导过程见本实验附录)。
I 。
m0gRr T o 2
( 1)
4 2H O
式中各物理量的意义如下: m 0为下盘的质量;r 、R 分别
为上下悬点离各自圆盘中心的距离; H 0为平衡时上下盘间的垂
直距离;T 0为下盘作简谐运动的周期, g 为重力加速度(在杭州
地区 g =9.793m/s 2)。
将质量为m 的待测物体放在下盘上,并使待测刚体的转轴与轴的总转动惯量为:
转动惯量为
I I i I o -^y-Km m °)Tj ^丁訂
(3)
4 2H
因此,通过长度、质量和时间的测量,便可求出刚体绕某轴的转动惯量。
用三线摆法还可以验证平行轴定理。
若质量为m 的物体绕过其质心轴的转动惯量为
I
盘运动周期T ]和上下圆盘间的垂直距离
H 。
同理可求得待测刚体和下圆盘对中心转轴 00
I i
(m o 4 m)gRr 2H
T i 2
如不计因重量变化而引起的悬线伸长, (2)
则有H H o 。
那么,待测物体绕中心轴 00的
00轴重合。
测出此时下
当转轴平行移动距离 x 时(如图2所示),则此物体对新轴 OO 的转动惯量为I 。
’ I c mx 2。
这一结论称为转动惯量的平行轴定理。
实验时将质量均为 m',形状和质量分布完全相同的两个圆柱 体对称地放置在下圆盘上(下盘有对称的两排小孔) 。
按同样的
方法,测出两小圆柱体和下盘绕中心轴 00的转动周期T x ,则可
求出每个柱体对中心转轴
00的转动惯量:
i x
1(m o 2r
)gRr
T 2 i o
⑷
2 4 2H
如果测出小圆柱中心与下圆盘中心之间的距离 x 以及小圆
柱体的半径R x ,则由平行轴定理可求得
「X m'x 2 〔m'R ;
(5)
2
比较I x 与I'x 的大小,可验证平行轴定理。
【实验内容】
1.测定圆环对通过其质心且垂直于环面轴的转动惯量
(1) 调整底座水平:调整底座上的三个螺钉旋钮,直至底板上水准仪中的水泡位于正 中间。
(2) 调整下盘水平:调整上圆盘上的三个旋钮 (调整悬线的长度),改变三悬线的长度, 直至下盘水准仪
中的水泡位于正中间。
(3) 测量空盘绕中心轴 00转动的运动周期T o :轻轻转动上盘,带动下盘转动,这样
可以避免三线摆在作扭摆运动时发生晃动(注意扭摆的转角控制在 5以内)。
周期的测量常
用累积放大法,即用计时工具测量累积多个周期的时间,
然后求出其运动周期(想一想,为
什么不直接测量一个周期?)。
如果采用自动的光电计时装置(光电计时的原理请参阅实验 三),光电门应置于平衡
位置,即应在下盘通过平衡位置时作为计时的起止时刻,且使下盘 上的挡光杆处于光电探头的中央,
且能遮住发射和接收红外线的小孔,
然后开始测量;如
用秒表手动计时,也应以过平衡位置作为计时的起止时刻(想一想,为什么?)
,并默读5、 4、3、2、1、0,当数到“ 0”时启动停表,
这样既有一个计数的准备过程,
又不致于少数
一个周期。
(4) 测出待测圆环与下盘共同转动的周期
T i :将待测圆环置于下盘上,注意使两者中
心重合,按同样的方法测出它们一起运动的周期
「。
2•用三线摆验证平行轴定理
将两小圆柱体对称放置在下盘上,测出其与下盘共同转动的周期 T x 和两小圆柱体的间
距2x 。
改变小圆柱体放置的位置,重复测量
5次。
3.其它物理量的测量
(1)在实验中,由于三条摆线并不是系在上、下两圆盘的边缘,而是系在离边缘很近 的三点,因此各盘三个
系点所组成等边三角形的同心圆的等效半径
R 、r 不等于盘的实际半
径,要通过间接测量获得,通过用米尺测量下盘的两系点之间的距离 a ,可计算出R ,如
图2所示。
对上盘同样有:
其中b 为上盘两系线点间的距离。
将以上两式代入(8
)式,得:
图2平行轴定理
图2边长与半径的关系
(2)用米尺测出两圆盘之间的垂直距离H o ;用游标卡尺测出待测圆环的内、外直径2R,、2R2和小圆柱体的直径2R x。
【数据处理与分析】
1.圆环转动惯量的测量及计算(表1和表2)
时磊5说-
v'3 万<3匸
r a R b
3 3
下盘质量m0待测圆环质量m 圆柱体质量m' H0
根据以上数据,求出待测圆环的转动惯量,将其与理论值计算值比较,求相对误差,并
进行讨论。
已知理想圆环绕中心轴转动惯量的计算公式为|理论m(R2 R;)。
2
2.验证平行轴定理(表3)
由上表数据,分析实验误差,由得出的数据给出是否验证了平行轴定理的结论。
【预习思考题】
(1)用三线摆测刚体转动惯量时,为什么必须保持下盘水平?
(2).测量周期时为什么要测50个周期的总时间?
(3)在测量过程中,如下盘出现晃动,对周期测量有影响吗?如有影响,应如何避免之?
(4)三线摆放上待测物后,其摆动周期是否一定比空盘的转动周期大?为什么?
(5)测量圆环的转动惯量时,若圆环的转轴与下盘转轴不重合,对实验结果有何影响?
(6)如何利用三线摆测定任意形状的物体绕某轴的转动惯量?
(7)三线摆在摆动中受空气阻尼,振幅越来越小,它的周期是否会变化?对测量结果影响大吗?为什么?
讨论题
1 •三线摆在摆动中受到空气的阻尼,振幅会越来越小,其周期是否会变化,为什么
2•你能否考虑一个实验方案,测量一个具有轴对称的不规则形状的物体对对称轴的转动惯量?
3•将一半径小于下圆盘半径的圆盘置于下圆盘上,并使中心一致。
试讨论,此时三线摆的周期和空载时的周期相比较是增大、减小,还是不一定?为什么?
4•圆盘A和圆环B的质量相同,但3次测量得到的转动惯量都不同•这说明了什么
(H 转动惯量测量式的推导
当下盘扭转振动,其转角很小时,
.2n.
0 sin t T0
当摆离开平衡位置最远时,其重心升高
1 I
2 .
-I 0 mgh
2
2mgh
2~ 0
2n 0
T
2 n0
其扭动是一个简谐振动,其运动方程为:
(6)
d
dt
cos
将(4-10 )式代入(4-7 )式得
mghT2
2~2~ 2n 0
从图4-3中的几何关系中可得
2 2 2 2
h)2 R2 2Rr cos 0 l2 H2 (R h2
简化得Hh Rr(1
2
r)
根据机械能守恒定律有:
(7)
(8)
h2
—,且取1
2
2
Rr 0
2H
(11)式得
m gRr 2
略去cos 00/2,则有:
代入
I -4 T2
4 2H
(12)
即得公式(1 )。
(12)式为本实验的最终实验式,它的适用条件为:
摆角很小,一般要求5°
;
摆线I很长,三条线要求等长,张力相同; 大小
圆盘水平;
转动轴线是两圆盘中心线。
4、
4、。