GPS的接收机灵敏度测试
GPS接收器测试
GPS接收器测试GPS接收器测试概观从波音747客机的导航操作、汽车驾驶每天都会使用的GPS导航系统,到寻宝者要找到深藏于森林某处的宝藏,GPS技术已经迅速融入于多种应用中。
正当创新技术不断提升GPS接收器效能的同时,相关的技术特性亦越来越完整。
时至今日,软件甚至可建立GPS波形,以精确仿真实际的讯号。
除此之外,仪器总线技术亦不断提升,目前即可透过PXI仪控功能,以记录并播放实时的GPS讯号。
介绍由于GPS技术已于一般商用市场逐渐普及,因此多项设计均着眼于提升相关特性,如:1)降低耗电量2)可寻找微弱的卫星讯号3)较快的撷取次数4)更精确的定位功能透过此应用说明,将可了解进行多项GPS接收器量测的方法:敏感度、噪声系数、定位精确度、首次定位时间,与位置误差。
此篇技术文件是要能让工程师彻底了解GPS的量测技术。
对刚开始接触GPS 接收器量测作业的工程师来说,可对常见的量测作业略知一二。
若工程师已具有GPS量测的相关经验,亦可透过此篇技术文件初步了解新的仪控技术。
此篇应用说明将分为下列数个段落:GPS技术的基础GPS量测系统常见量测概述a.?敏感度b.?首次定位时间(TTFF)c.?定位精确度与重复性d.?追踪精确度与重复性每个段落均将提供数项实作秘诀与技巧。
更重要的是,读者可将自己的结果与GPS接收器获得的结果进行比较。
透过自己的结果、接收器的结果,再搭配理论量测的结果,即可进一步检视自己的量测数据。
GPS导航系统介绍全球定位系统(GPS)为空间架构的无线电导航系统,本由美国空军所研发。
虽然GPS原是开发做为军事定位系统之用,却也对民间产生重要影响。
事实上,您目前就可能在车辆、船舶,甚至移动电话中使用GPS接收器。
GPS导航系统包含由24组卫星,均以L1与L2频带(Band)进行多重讯号的传输。
透过1.57542GHz的L1频带,各组卫星均产生1.023MchipsBPSK(二进制相位键移)的展频讯号。
GPS接收机灵敏度解析

1 GPS接收机的灵敏度定义随着GPS应用范围的不断扩展,对GPS接收机的灵敏度要求也越来越高,高灵敏度的接收性能可以令接收机在室内或其它卫星信号较弱的场景下仍然能够实现定位和跟踪,大大拓展了GPS的使用范围。
作为GPS接收机最为重要的性能指标之一,高灵敏度一直是各个GPS接收模块孜孜以求的目标。
对于GPS接收系统而言,灵敏度指标包括多个场景下的指标,分别为:跟踪灵敏度、冷启动灵敏度、温启动灵敏度。
目前业界已经可以实现跟踪灵敏度在-160dBm以下,冷启动灵敏度和温启动灵敏度也分别可以达到-145dBm和-158dBm以下,其中冷启动灵敏度和温启动灵敏度分别表示的是在两种不同场景下的捕获灵敏度。
GPS接收机首先需要完成对卫星信号的捕捉,完成捕捉所需要的最低信号强度为捕捉灵敏度;在捕捉之后能够维持对卫星信号跟踪所需要的最低信号强度为跟踪灵敏度。
2 GPS接收模块的灵敏度性能分析从系统级的观点来看,GPS接收机的灵敏度主要由两个方面决定:一是接收机前端整个信号通路的增益及噪声性能,二是基带部分的算法性能。
其中,接收机前端决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕捉、跟踪过程所能容忍的最小信噪比。
2.1接收机前端电路性能对灵敏度的影响GPS信号是从距地面20000km的LEO(Low Earth Orbit,低轨道卫星)卫星上发送到地面上来的,其L1频段(f L1=1575.42MHz)自由空间衰减为:(1)按照GPS系统设计指标,L1频段的C/A码信号的发射EIRP(Effective Isotropic Radiated Power,有效通量密度)为P=478.63W(26.8dBw)([1][2]),若大气层衰减为A=2.0dB,则GPS系统L1频段C/A码信号到达地面的强度为:(2)GPS ICD(Interface Control Document,接口控制文档)文件([3])中给出的GPS系统L1频段C/A码信号强度最小值为-160dBw,和上述结果一致。
移动应用GPS定位精度测试说明

移动应用GPS定位精度测试说明移动应用GPS定位精度测试说明一、引言移动应用的GPS定位是现代应用程序中常用的一项功能,通过GPS定位能够获取到设备的实时地理位置信息,为用户提供更加便利和个性化的服务。
然而,由于各种因素的干扰,GPS定位的精度难以保证。
为了确保应用程序定位功能的稳定性和准确性,需要进行GPS定位精度的测试。
本文将介绍一种基于真实场景的GPS定位精度测试方法。
二、测试目标本次测试的目标是验证移动应用在真实环境下的GPS定位精度。
通过测试,我们可以评估移动应用在不同环境下的GPS定位精度,并找出可能存在的问题和改进方案。
三、测试工具与环境1. GPS模拟器:使用GPS模拟器可以模拟不同的环境,并提供不同的GPS信号质量和精度。
常见的GPS模拟器有Android Emulator、Xcode模拟器等。
2. GPS测量软件:使用GPS测量软件可以获取到实际的设备位置信息,常见的GPS测量软件有Google Maps、百度地图等。
3. 场景设置:通过更改测试场景的环境和条件,如室内室外、高楼大厦、山区等,可以模拟不同的GPS信号强度和质量。
四、测试内容与步骤1. 定位准确度测试:在不同的测试场景(室内、室外、高楼大厦、山区等)下,使用GPS测量软件获取实际位置,并与应用程序显示的位置进行比对,评估移动应用的定位准确度。
步骤:a. 设置测试场景,如室内、室外等。
b. 打开GPS测量软件,并获取实际位置。
c. 打开移动应用,并获取应用程序显示的位置。
d. 对比实际位置和应用程序显示的位置,评估定位准确度。
2. 定位速度测试:测试移动应用在不同场景下的定位速度,即从信号接收到获取位置信息的时间。
步骤:a. 设置测试场景,如室内、室外等。
b. 打开移动应用,并等待获取到位置信息。
c. 记录从打开应用到获取位置信息的时间,评估定位速度。
3. 定位精度测试:测试移动应用在相同场景下的多次定位,评估定位的一致性和稳定性。
GPS接收机简介及性能测试
GPS接收机简介及GPS性能测试研究GPS接收机,是GPS导航卫星的用户设备,是实现GPS卫星导航定位的终端仪器。
它是一种能够接收、跟踪、变换和测量GPS卫星导航定位信号的无线电接收设备,既具有常用无线电接收设备的共性,又具有捕获、跟踪、和处理卫星微弱信号的特性。
GPS(Navigation System with Timing and Ranging Global Positioning System)是美国国防部开发运行的,带有定时和测距的全球导航定位系统。
GPS 系统由三部分组成:GPS 空中卫星,地面控制以及GPS 用户接收机。
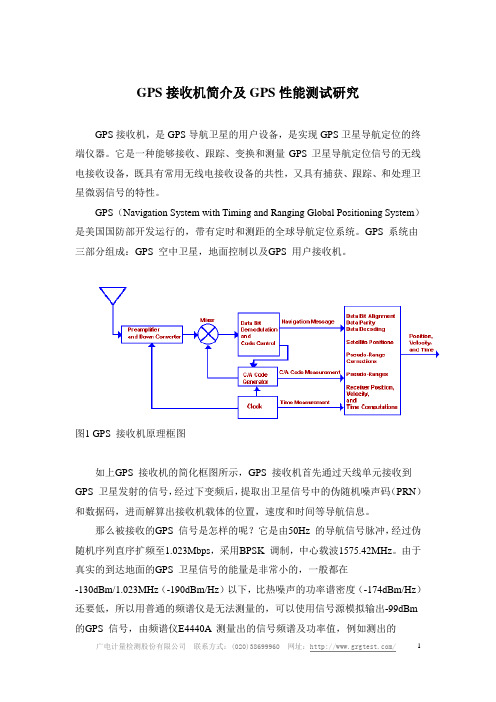
图1 GPS 接收机原理框图如上GPS 接收机的简化框图所示,GPS 接收机首先通过天线单元接收到GPS 卫星发射的信号,经过下变频后,提取出卫星信号中的伪随机噪声码(PRN)和数据码,进而解算出接收机载体的位置,速度和时间等导航信息。
那么被接收的GPS 信号是怎样的呢?它是由50Hz 的导航信号脉冲,经过伪随机序列直序扩频至1.023Mbps,采用BPSK 调制,中心载波1575.42MHz。
由于真实的到达地面的GPS 卫星信号的能量是非常小的,一般都在-130dBm/1.023MHz(-190dBm/Hz)以下,比热噪声的功率谱密度(-174dBm/Hz)还要低,所以用普通的频谱仪是无法测量的,可以使用信号源模拟输出-99dBm 的GPS 信号,由频谱仪E4440A 测量出的信号频谱及功率值,例如测出的2.046MHz 带宽内的功率值。
尽管GPS技术日益普及,但是GPS接收机制造商、OEM集成商仍在为如何验证GPS接收机性能的标准测试而烦恼。
无论是验证GPS接收机整机的功能,还是客观地测量各种GPS IC的性能,都需要一个能够重复执行精确测量的可控环境(比如屏蔽室)。
大多数情况下,制造商使用天线来接收实际的GPS卫星信号,但往往这样的测试,由于受到复杂的气候影响,电离层延迟,多径衰减等因素,使得测量可重复性非常差,尽管耗费了很多人力和时间,却很难得到一个真实而精准的数据。
接收机灵敏度测量方法
接收机灵敏度测量方法
灵敏度的定义与量测
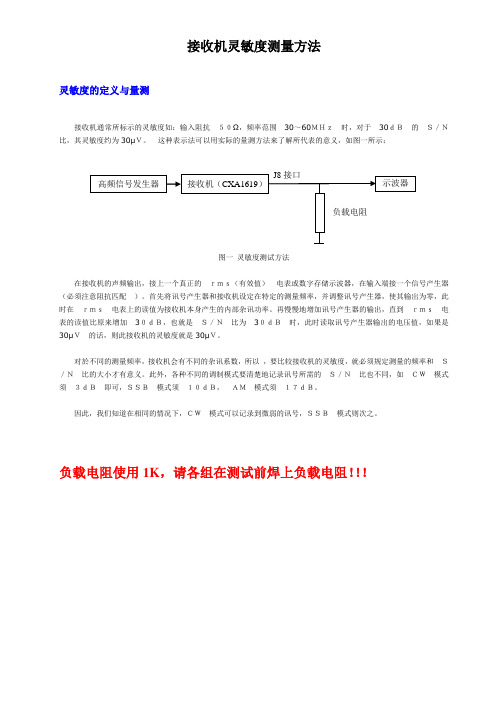
接收机通常所标示的灵敏度如:输入阻抗50Ω,频率范围30~60MHz时,对于30dB的S/N比,其灵敏度约为30μV。
这种表示法可以用实际的量测方法来了解所代表的意义,如图一所示:
图一灵敏度测试方法
在接收机的声频输出,接上一个真正的rms(有效值)电表或数字存储示波器,在输入端接一个信号产生器(必须注意阻抗匹配)。
首先将讯号产生器和接收机设定在特定的测量频率,并调整讯号产生器,使其输出为零,此时在rms电表上的读值为接收机本身产生的内部杂讯功率。
再慢慢地增加讯号产生器的输出,直到rms电表的读值比原来增加30dB,也就是S/N比为30dB时,此时读取讯号产生器输出的电压值,如果是30μV的话,则此接收机的灵敏度就是30μV。
对於不同的测量频率,接收机会有不同的杂讯系数,所以,要比较接收机的灵敏度,就必须规定测量的频率和S/N比的大小才有意义。
此外,各种不同的调制模式要清楚地记录讯号所需的S/N比也不同,如CW模式须3dB即可,SSB模式须10dB,AM模式须17dB。
因此,我们知道在相同的情况下,CW模式可以记录到微弱的讯号,SSB模式则次之。
负载电阻使用1K,请各组在测试前焊上负载电阻!!!。
GPS接收机的灵敏度分析
GPS接收机的灵敏度分析首先,灵敏度是指接收机在低信号强度情况下能够接收到的最小有效信号强度。
通常以接收和解码导航信号的最低功率为衡量标准,以dBm或dB-Hz为单位进行表示。
接收机的灵敏度越高,就能在更弱的信号环境下工作,提高了定位的可靠性和成功率。
接下来,影响GPS接收机灵敏度的因素主要有以下几个方面:1.天线性能:GPS接收机的天线性能直接影响信号接收的效果。
天线的增益、波束宽度和方向性等指标都会对接收机的灵敏度产生影响。
因此,选择合适的天线和调整其方向也是提高灵敏度的重要手段。
2.前端设计:前端设计主要包括低噪声放大器(LNA)的设计和功率分配等。
LNA的噪声系数和增益直接影响了接收机的灵敏度。
较低的噪声系数和合适的功率分配可以提高接收机的灵敏度。
3.中频放大器(IF)设计:IF放大器的设计和性能对于信号处理的正确性和灵敏度也有着显著的影响。
合适的增益、线性度和频带宽度都是提高灵敏度的重要因素。
4.数据处理算法:接收到的GPS信号需要经过一系列的解调、解码、滤波等处理才能得到最终的定位结果。
因此,高效、精确的数据处理算法也是提高灵敏度的重要因素。
除了影响因素,还有一些方法可以提高GPS接收机的灵敏度:1.天线方面:选择合适的天线,并根据天线增益和方向性调整天线的方向,以获得更好的信号接收效果。
2.前端设计:合理选择LNA的设计参数,以获得更低的噪声系数和更高的增益。
优化功率分配,增强前端输入信号的有效性。
3.中频放大器设计:充分考虑IF放大器的设计参数,以保证其增益、线性度和频带宽度的一致性。
避免过度放大和失真。
4.数据处理算法:针对GPS信号处理进行优化,提高解调和解码算法的性能,优化滤波和数据处理流程,从而提高定位的可靠性和精度。
综上所述,GPS接收机的灵敏度是衡量其接收能力的重要指标之一、灵敏度的高低直接影响了接收机在低信号强度环境下的工作效果。
通过选择合适的天线、优化前端和中频放大器的设计以及优化数据处理算法等方法,可以提高GPS接收机的灵敏度,提高定位的可靠性和精度。
gps模块定位精度测试方法
gps模块定位精度测试方法GPS模块是一种通过使用卫星信号来确定地理位置的设备。
尽管GPS 技术在过去几十年里得到了极大的改进,但由于多种因素的干扰,它的定位精度可能会受到一些限制。
为了测试GPS模块的定位精度,我们可以采用以下方法:1.室外测试:找到一个开放的室外区域,远离高大的建筑物、大树或其他高障碍物,以便接收到尽可能多的卫星信号。
在一个开阔的空间中进行测试,有助于减少信号干扰,提高定位精度。
2.设定合适的时间间隔:GPS模块的定位时间间隔越短,定位精度越高。
因此,选择一个较短的时间间隔,比如每秒钟定位一次,可以获得更准确的数据。
3.测试不同的环境:在测试过程中,确保在不同的环境中进行测试。
这包括城市、农村、山区和海边等地方。
比较测试结果可以帮助我们了解GPS模块在不同环境下的定位精度。
4.校准:在进行测试之前,确保GPS模块已经得到正确的校准。
这可以通过更新模块的固件或软件来实现。
确保模块的时间和日期正确,以便与卫星上的时间同步。
5.多次测试:进行多次测试可以获得更准确和可靠的结果。
每次测试时,在相同的环境和位置中进行多次测量,然后将结果进行平均,可以减少测试误差。
6.使用辅助工具:使用辅助工具可以帮助测试GPS模块的定位精度。
比如,可以使用地图软件来比较GPS模块提供的位置和实际位置之间的差异。
此外,使用GPS信号强度计可以帮助了解当信号质量较差时,模块的定位精度会受到怎样的影响。
7.比较不同的GPS模块:如果可行的话,可以同时测试和比较多个不同型号或品牌的GPS模块。
这样可以帮助我们了解不同模块之间的差异,并找出最适合我们需求的模块。
8.注意信号遮挡:在测试过程中,要留意可能会遮挡卫星信号的物体,比如建筑物、树木、山脉等。
遮挡物可以导致信号衰减或失去,从而影响定位精度。
10.参考其他数据源:在测试过程中,可以与其他可靠的数据源进行比对,比如地图、地理信息系统等。
这样可以帮助验证和评估GPS模块提供的定位精度。
GPS接收机检定原理及检定数据自动化处理分析
GPS接收机检定原理及检定数据自动化处理分析GPS(全球定位系统)接收机是一种用于接收GPS信号的设备,主要用于定位和导航。
为保证GPS接收机在使用时的精度和可靠性,需要进行定期的检定。
本文将介绍GPS接收机的检定原理及检定数据自动化处理分析。
GPS接收机检定主要包括以下几个方面:1.接收灵敏度接收灵敏度指GPS接收机接收到的最小有效信号强度。
对于不同型号的GPS接收机,其接收灵敏度也会有所不同。
为了确保GPS接收机在实际使用中的准确性,需要对其进行接收灵敏度检定。
2.速度计算准确性GPS接收机可以通过接收卫星信号计算出其所处的位置和速度。
对于速度的计算,需要对GPS接收机的速度计算准确性进行检定。
主要是通过比较GPS接收机计算出的速度与实际速度之间的差异来确定其准确性。
3.时间同步准确性4.导航定位准确性传统的GPS接收机检定需要对检定数据进行手工处理和分析,这种方式效率较低且容易出现误差。
因此,一种自动化的检定数据处理和分析方法就变得非常重要。
自动化的检定数据处理和分析主要是利用计算机编程语言编写相应的程序,将检定数据自动导入到计算机中进行处理和分析。
在处理和分析过程中,可以利用一些算法来对数据进行筛选和优化,以获得更为准确的结果。
利用自动化的方法处理和分析GPS接收机检定数据可以提高检定效率,减少误差,同时还可以获得更为准确的检定结果。
在实际使用中,可以根据需要开发相应的检定数据处理和分析程序,以满足不同的需求。
总结GPS接收机是一种重要的定位和导航设备,为确保其准确性和可靠性,需要进行定期的检定。
检定主要包括接收灵敏度、速度计算准确性、时间同步准确性和导航定位准确性等方面。
自动化的检定数据处理和分析可以提高检定效率和准确性,是一种非常重要的工具。
导航接收机指标分析及测试
导航接收机指标分析及测试导航接收机是导航系统中的重要组成部分,它可以接收来自卫星的导航信号,并通过信号处理和解算处理,计算出准确的位置、速度和时间信息。
导航接收机的性能指标对于导航系统的精度和性能至关重要,因此进行指标分析和测试是必不可少的。
首先,导航接收机的灵敏度是一个重要的指标。
灵敏度表示接收机能够接收到的最小有效信号功率。
导航卫星发射的信号非常微弱,所以接收机的灵敏度必须足够高,以便在低信噪比环境下可靠地接收到信号。
为了测试导航接收机的灵敏度,可以使用各种信号源模拟低信噪比环境,通过逐步降低信号功率,观察接收机的工作情况,找出其最低可接收信号功率。
其次,导航接收机的定位精度是另一个重要的指标。
定位精度表示接收机根据接收信号计算出的位置与真实位置之间的误差。
为了评估接收机的定位精度,可以使用精确的位置测量仪器作为参考,通过与接收机计算出的位置进行对比,计算出定位误差。
此外,还可以使用卫星导航系统的辅助信息进行定位校准,如地面测量点坐标、差分GPS技术等,提高定位精度。
第三,导航接收机的跟踪性能也是需要测试的指标之一、跟踪性能表示接收机在快速移动或者多路径干扰环境中跟踪导航信号的能力。
跟踪性能包括跟踪卫星数目、跟踪信噪比和跟踪灵敏度等方面。
为了评估导航接收机的跟踪性能,可以使用不同方向运动的模拟器来模拟快速移动的情况,利用不同强度的干扰信号来模拟多路径干扰的情况,观察接收机的跟踪情况。
最后,导航接收机的时钟精度也是一个需要测试的指标。
时钟精度表示接收机计算时间的准确性。
为了测试时钟精度,可以使用精确的时间信号源作为参考,通过与接收机计算的时间进行比较,评估时钟的准确性。
总结来说,导航接收机的性能指标包括灵敏度、定位精度、跟踪性能和时钟精度等。
测试这些指标可以通过模拟各种环境条件、使用精确的参考测量设备和信号源,来评估接收机的性能和指标是否达到要求。
只有通过全面的指标分析和测试,才能确保导航接收机的良好性能,提高导航系统的精度和可靠性。
GPS接收机的灵敏度分析
GPS接收机的灵敏度分析GPS接收机的灵敏度分析根据GPS 接收机的定位原理和GPS 接收机灵敏度分析接收机性能,发现灵敏度主要与前端电路和基带有着密切关系。
据此对GPS 的天线前端电路设计滤波器和低噪声放大器,并对电路的其他方面提出要求,考虑包含处理器和大量逻辑门电路的Cyclo ne 器件,并通过配置嵌入式软核处理设计GPS 接收机。
GPS 系统在海运方面因能够提供连续、高精度的船位,在保证船舶安全经济方面和保证在计划航线上航行有着极为重要的作用。
高灵敏度的GPS 接收机要求接收机在卫星信号较弱的场景下仍然能够实现定位和跟踪。
GPS 接收系统的灵敏度指标包括跟踪灵敏度、捕获灵敏度和初始启动灵敏度。
目前GPS 接收机基本上可以实现跟踪灵敏度在- 160 dBm 以下,同时初始启动的灵敏度和捕获灵敏度也分别可以达到- 142dBm 和- 148 dBm 以下。
1 GPS 接收机灵敏度分析GPS 接收机的灵敏度主要由两个方面决定:一是接收机前端信号通路的增益及噪声性能,二是基带部分的算法性能。
接收机前端决定了接收信号到达基带部分时的信噪比; 基带算法则决定了解调、捕获、跟踪过程需要最小信噪比。
GPS 卫星的导航载波信号是L 频段(L 1 :19cm; L2 :24 cm)的电波信号,现行GPS 工作卫星采用L 波段的三种导航信号,分别为L 1、L2、L3 ,其载波频率分别为:1 575 42、1 227 60 和1 381. 05 MHzGPS 信号是从距地面20 000 km 的卫星发送到地面,其L 1频段(f L1 = 1 575. 42 MHz)自由空间衰减为:根据GPS 接口控制文档(interface cONt ro ldocument ,ICD)规定GPS 系统L 1频段C/ A 码信号强度的最小值为- 160 dBW,而GPS 系统设计该频段中C/ A 码信号发射的有效通量密度(effect ive isot ro pic radiated pow er,EIRP)为P=478. 63 W(26. 8 dBW)[4],若大气层衰减为2. 0dBW,那么GPS 系统L 1 频段C/ A 码信号到达地面的强度为:。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
接收机灵敏度分析时间:2010-01-19 13:05:49 来源:作者:1 GPS 接收机的灵敏度定义随着GPS 应用范围的不断扩展,业界对GPS 接收机的灵敏度要求也越来越高,高灵敏度的接收性能可以令接收机在室内或其它卫星信号较弱的场景下仍然能够实现定位和跟踪,大大拓展了GPS 的使用范围。
作为GPS 接收机最为重要的性能指标之一,高灵敏度一直是各个GPS 接收模块孜孜以求的目标。
对于GPS 接收系统而言,灵敏度指标包括多个场景下的指标,分别为:跟踪灵敏度、捕获灵敏度、初始启动灵敏度。
目前业界已经可以实现跟踪灵敏度在-160dBm 以下的接收机,同时,初始启动的灵敏度和捕获灵敏度也分别可以达到-142dBm 和-148dBm 以下。
GPS 接收机首先需要完成对卫星信号的捕获,完成捕获所需要的最低信号强度为捕获灵敏度;在捕获之后能够维持对卫星信号跟踪所需要的最低信号强度为跟踪灵敏度。
为了实现定位,GPS 接收机还需要解调GPS 卫星发送的导航电文,相应的,解调导航电文所需要的最低信号强度为初始启动灵敏度。
根据上述定义可知,跟踪灵敏度最高,捕获灵敏度次之,初始启动灵敏度最差。
2 GPS 接收模块的灵敏度性能分析从系统级的观点来看,GPS 接收机的灵敏度主要由两个方面决定:一是接收机前端整个信号通路的增益及噪声性能,二是基带部分的算法性能。
其中,接收机前端决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕获、跟踪过程所能容忍的最小信噪比。
2.1 接收机前端电路性能对灵敏度的影响GPS 信号是从距地面20000km 的LEO(Low Earth Orbit,低轨道卫星)卫星上发送到地面上来的,其L1 频段(fL1=1575.42MHz)自由空间衰减为:按照GPS 系统设计指标,L1 频段的C/A 码信号的发射EIRP(Effective Isotropic RadiatedPower,有效通量密度)为P=478.63W(26.8dBw)([1][2]),若大气层衰减为A=2.0dB,则GPS 系统L1 频段C/A 码信号到达地面的强度为:GPS ICD(Interface Control Document,接口控制文档)文件([3])中给出的GPS 系L1 频段C/A 码信号强度最小值为-160dBw,和上述结果一致。
在实际场景中,由于卫星仰角的不同、以及受树木、建筑物等的遮挡,L1 频段C/A 信号到达地面的强度可能会低于-160dBw。
一般GPS 接收机的结构如下图所示:GPS 信号被天线接收下来后,如果天线有源,则经过滤波器和低噪放,再通过电缆接到接收机部分,接收机内同样经过一级低噪放和一级滤波器,再进入射频前端模块进行下变频和模数转换处理。
上图中,天线后直接接滤波器进行前置滤波,其作用在于防止宽带干扰阻塞低噪放,但会增大前级的噪声系数,因此在选用器件时需要考虑采用插损尽量小的滤波器。
天线的有源部分主要是用来补偿从天线到接收模块之间的电缆损耗,如果天线和接收模块之间的插损极小,则可以使用无源天线。
GPS 接收机前端的特性可以由整个接收机的G/T 值来表征。
设GPS 接收机的射频前端可以分n 级,第i 级的增益、噪声系数、等效噪声温度分别为Gi、NFi、Tei,则GPS 接收机的总的等效噪声温度为:由上式可知,整个接收机的噪声温度受前级影响最大,因此需要在前级采用较高增益、较低噪声系数的低噪声放大器。
系统的G/T 值为:其中,Ga 为天线增益,Ta 为天线噪声温度。
天线的噪声温度和天线大小、信号频率、天线方向图、摆放位置等都有关系,一般认为GPS 天线噪声温度为Ta=100K。
根据系统的G/T 值即可以得到在一定输入信号功率下的接收载噪比:其中,k=1.38e-23,为Bolzmann 常数。
下表给出了采用有源天线的场景下常见的GPS 接收模块前端载噪比计算:表 1 有源天线场景下GPS 接收单元前端载噪比计算从上表可以很明显的看出,影响系统载噪比的最主要因素是天线本身的增益和噪声温度,在天线无源部分性能确定的条件下,天线有源部分则决定了整个系统的载噪比变化,而后级的链路增益和噪声系数对系统载噪比基本没有贡献。
实际电路设计中,由于电磁干扰的存在,每一级都有可能引入新的噪声,后级的性能也会对系统载噪比产生重要影响。
因此,需要重点考虑电磁干扰对系统性能带来的损失。
有源天线的主要目的是补偿天线至接收机的电缆损耗,对于天线和接收机比较接近的场景,天线至接收机的损耗基本可以忽略,则可以直接采用无源天线,通过提高接收机内部第一级低噪声放大器的增益和噪声系数性能,同样可以达到采用有源天线的性能。
第一级的噪声系数决定了前级引入噪声的大小,而第一级的增益则决定了后级引入的噪声对系统性能的影响,第一级的增益越大,后级噪声性能对系统性能的影响越小,但同时需要考虑整个信号通路至A/D 量化部分的总体增益,以确保A/D 量化对信噪比的损失最小。
下图给出了接收机前级低噪声放大器的噪声系数对系统整体载噪比的影响,图中还给出了不同增益天线的性能差异。
实际中选用天线时,除天线增益外,还需要考虑天线的方向图、不圆度以及轴比、驻波系数等性能。
图 2 前级放大器噪声系数对载噪比的影响接收机前端的A/D 转换过程也会导致系统载噪比的降低,A/D 量化对信噪比的影响主要和A/D 量化位数有关,一般认为,1bit 量化会导致1.96dB 的载噪比损失,但该值的前提是中频带宽为无限宽。
A/D 转换的载噪比损失还和中频带宽有关,对于中频带宽等于C/A 码带宽而言,1bit 量化会导致3.5dB 的载噪比损失,而3bit 量化带来的载噪比损失为0.7dB ([4])。
此外,A/D 转换对性能的影响还和A/D 量化最大阈值和噪声的均方根(RMS)之间的比例有关。
接收机的热噪声基底为:假设接收机带宽为GPS C/A 码的带宽2.046MHz,则热噪声基底的功率为:该功率远大于GPS 输入信号功率-130dBm,因此系统的增益控制以及A/D 量化阈值主要由热噪声确定,与输入信号强度基本无关。
常用的GPS 射频芯片中,A/D 量化和自动增益控制部分的电路都是联合设计的,根据A/D 量化阈值的要求设置自动增益控制的控制电平。
2.2 基带算法性能对灵敏度的影响基带算法性能直接影响信号捕获、跟踪以及解调过程对载噪比的最低要求。
GPS 信号是一个扩频系统,对于C/A 码而言,其扩频码为码长1023 的Gold 码,码速率为1.023Mcps,即每1ms 为一个C/A 码周期。
因此,可以通过提高本地码和接收信号之间的积分时间来提高接收信号的载噪比。
积分方式分为相干累积和非相干累积。
相干累积是指直接用本地码和接收信号按位相乘后再累加,而非相干累积则是对相干累积的结果再进行直接相加。
相干累积结果可根据下式进行计算([5]):其中,Δf为本地本振与载波之间的频率差,T 为相干累积时间, 0 CN 为到达基带时的信号载噪比,单位为dBHz,R(τ ) 为C/A 码的自相关函数,Δφ为初始相位差, D为信号调制的导航电文符号, Iη和Q η分别为I 路和Q 路的噪声。
由公式(6)(7)可知,相干累积结果和相干累积时长非常相关,相干累积时间越长,对输入载噪比的要求越低,其灵敏度也就越高,但累积时长过长,由于频偏Δf的影响,上式中第一项值也会越小,又会降低其灵敏度。
因此,一般高灵敏度的GPS 接收机都需要采用频率稳定度较高的TCXO 作为本振,以降低本地频率和载波频率之间的偏差。
一般而言,高灵敏度的基带算法对本振的稳定度要求在8ppm 左右,该稳定度包括校正偏差、老化以及温度补偿稳定度,对于频率校正稳定度为2ppm、老化稳定度为5ppm 的TCXO 而言,一般要求其温度补偿稳定度在0.5ppm 以内。
非相干累积结果为( 2 2 )i i Σ I +Q ,通过公式(6)(7)还可以看出,当采用非相干累积时,由于Iη和Q η的存在,其信噪比会比相干累积有所降低。
下图给出了不同频率偏移情况下相干累积结果随相干时长变化的情况。
由图中可以看出,当频偏较小的情况下,可以选择较长的相干时长以达到较高的相干累积结果。
图 3 相干时长与相干累积结果的关系2.3 高接收灵敏度的GPS 接收机设计根据本文前述内容的分析可知,要设计高接收灵敏度的GPS 接收机,需要从以下几个方面着手:1、要有好的抗干扰和隔离设计,由于GPS 信号属于弱信号,信号强度在-130dBm 左右,因此射频通道内任何一级引入的干扰都有可能极大地影响系统的接收信噪比,因此,需要从电路设计上做到抗干扰和隔离,尤其是地线的设计,差的地线设计可以使系统信噪比降低6dB 以上;2、需要最小化接收机噪声,即尽可能提高系统的G/T 值,这可以从尽量降低前级噪声系数、提高前级增益等方面进行,但同时还需要考虑系统的动态范围,全通道增益不能过大;3、要有好的基带算法,包括对信噪比要求极低的捕获、跟踪算法,这一点目前在业界很多GPS 基带芯片内都已经实现;4、需要高稳定度的本振,这也是好的基带算法能够工作的必要前提。
3 总结随着GPS 应用范围的不断扩展,业界对GPS 接收机的灵敏度要求也越来越高。
GPS 接收机的灵敏度主要受两个部分的限制:一是接收机前端电路包括天线部分的设计,二是接收机基带算法的设计。
其中,接收机前端电路决定了接收信号到达基带部分时的信噪比,而基带算法则决定了解调、捕获、跟踪过程所能容忍的最小信噪比。
本文针对上述两个方面的原理分别进行了阐述,并给出了高灵敏度接收机设计的建议。