6弹塑性力学基本求解方法
合集下载
6弹塑性力学基本求解方法

d r
dr
1 r
(2
r
)
0
代入几何方程和物理方程,整理可得
d 2ur 2 dur 2 ur 0 dr 2 r dr r 2
第六章 弹性力学基本求解方法
❖位移法应用——错配球
解此微分方程,其一般解为:
由 r 时 ur 0 C1 0
ur
C1r
C2 r2
由 r r1 时 ur r0 C2 r0 (1 )2 r02 r03
l 2
h/2
x
ydy
0
第六章 弹性力学基本求解方法
❖应力函数——逆解法
于是可求得:
B
r 5h2
,C
l2r 4h2
10r,
D
3 4
r
x
所以 y
xy
第六章 弹性力学基本求解方法
❖应力函数——逆解法 总结:应力函数设计
1.集中载荷——按材料力学方法求解 2.均布载荷—— f (xi2 ) 3.线性分布载荷—— f (xi3 ) 4.非线性分布载荷—— f (xi4 xi8 )
r1
r0
r0
)
—— 错配度
分析:基体变形为球对称变形,则
ur 0 u u 0
边界条件:
r , ur 0 (符合圣维南原理)
第六章 弹性力学基本求解方法
❖位移法应用——错配球
根据应力平衡微分方程
R0
有
r r
1 r
r
r r sin
1 r
(2
r
r ctg ) 0
r
r
0
r
r
ur
r0
(
r0 r
)2
由几何方程可得
弹塑性_塑性力学基本方程和解法
在加载过程中物体各点处的偏应力分量 sij 保持比例不变。在工程允许精度下,也可推
广应用于稍为偏离简单加载的情况。
以上各种理论中涉及的一些假设,例如:塑性应变偏量的增在单一的函数关系等假设,都得到了常用金属材
料大量试验的验证。
z 强化规律 对于理想弹塑性材料,材料一旦屈服,其应力状态点在主应力空间中就落在屈服
变形, Hα 也不变,于是
∂f ∂σ ij
除等向强化外,有些强化材料表现为随动强化(图 7.7b),即,在强化过程中,屈
服面的大小和形状保持不变,只随塑性变形的发展而在应力空间中平移。还有些材料
在强化过程中随动强化与等向强化同时发生,称为混合强化。
由于在应力和强化参数空间中,表示应力状态的应力点只可能位于后继屈服面
(或加载面)上或其内,不可能位于曲面之外,若加载面是一个正则曲面,则有
⎯2⎯
研究生学位课弹塑性力学电子讲义
姚振汉
⎧ε = 0 ⎨⎩σ = σ s
当 σ <σs 当 ε >0
(2)
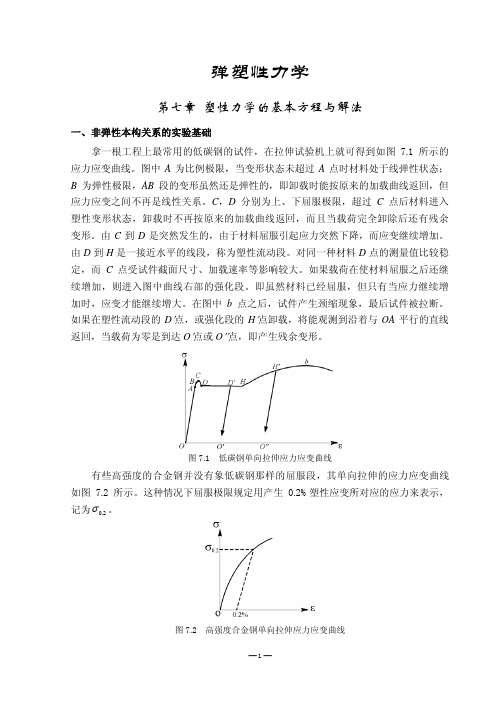
图 7.5 理想弹塑性和刚塑性
当考虑材料强化性质时,可在理想弹塑性模型的基础上加以改进,采用线性强化 弹塑性模型来近似:
⎧σ = Eε
⎨⎩σ = σ s +E1 (ε − εs )
当 ε ≤εs 当 ε >εs
(5)
⎯3⎯
第七章 塑性力学的基本方程与解法
其中 k 可由单向拉伸或其它材料试验测得的σ s 确定, k = σ s 2 。当不能确定主应力的 排序时,在以三个主应力为坐标轴的应力空间中,由特雷斯卡条件所包围的弹性状态 的应力空间为
σ1 −σ 2 ≤ 2k, σ 2 −σ 3 ≤ 2k, σ 3 −σ1 ≤ 2k
弹塑性力学第六章

26
§6-3 平面问题的基本解法
当体力为常数或体力为零时,两个平面问题 的相容方程一致
2(x+y ) = 0
(x+y )为调合函数,与弹性系数无关,不
管是平面应力(应变)问题,也不管材料如何, 只要方程一致,应力解一致,有利实验。
2019/10/28
27
§6-3 平面问题的基本解法
3.2 应力函数解法 当体力为常量或为零时,按应力法解的
第六章 弹性力学平面问题的直 坐标系解答
§6-1平面问题的分类 §6-2平面问题的基本方程和边界条件 §6-3平面问题的基本解法 §6-4多项式应力函数运用举例
2019/10/28
1
第六章 弹性力学平面问题的直 坐标系解答
在第五章讨论了弹性力学问题的基本解法: 位移法和应力法,并结合简单的三维问题, 根据问题的特点,猜想问题的应力解或位移 解,并验证猜想的解是否满足应力法或位移 法的基本方程和边界条件,满足则为问题真 解。
1.1 平面应力问题
受力和约束特点:沿厚度(x3方向)均匀分
布,体力 f3 = fz = 0 , 面力 X 板表面无面力,坐标系(x1 ,
3 x2
Z ,
0 ,在薄
x3)放在板
厚中间平面——中平面,以z(或x3)轴垂直板
面。满足上述条件的问题称为平面应力问题
2019/10/28
7
§6-1平面问题的分类
最后应力分量解为其特解加通解:
x
y2
fx x,
y
x2
fy
y,
xy
2 xy
2019/10/28
35
弹塑性力学第6章—弹塑性力学问题的建立与基本解法
6.3 塑性力学基本方程与边界条件
6.3.2 塑性力学问题的基本解法
对应于增量理论和全量理论,塑性力学问题采用不同的解法。
全量理论中塑性力学问题的提法:
已知作用于物体上的体力、边界面力(给定力边界上)、 边界位移增量(给定位移边界上)的加载历史,求解某一时刻 物体的应力场、应变场、位移场。
全量理论对应的解法:
θ = εx + ε y + εz
2 2 2 ∂ ∂ ∂ 2 , ∇ = 2 + 2 + 2 ∂x ∂y ∂z
6.2 弹性力学问题的基本解法
位移法:
上述位移法平衡方程表示为张量形式为
(λ + μ )u j , ji + μui, jj + fi = 0
位移法平衡方程的推导包含了平衡方程、几何方程和本构 方程的信息,求解时只需补充边界条件。 当边界条件为给定位移时,可以直接使用;当边界条件为 给定面力时,则可通过广义胡克定律和几何关系,将其中的 应力用位移来表示。
增量理论
e dε ij = dε ij + dε ijp
e ij
1 dε ij = ( dui , j + du j ,i ) 2
3v 其中弹性应变增量 dε = − dσ mδ ij 2G E
塑性应变增量 dε ijp = dλ
dσ ij
∂ϕ 3dε p , dλ = ∂σ ij 2σ s
6.3 塑性力学基本方程与边界条件
用张量公式表示为
1 ε ij = (ui , j + u j ,i ) 2
此外还可补充6个应变协调方程
6.1 弹性力学基本方程与边界条件
弹性力学基本方程
本构方程:
第五章 弹性与塑性力学的基本解法

(1)位移法:即以位移分量作为基本未知量,来求解边值 问题。此时将一切未知量和基本方程都转换成用位移分量 来表示。通常给定位移边界条件的边值问题,宜用此法。 (2)应力法:即以应力分量作为基本未知量,来求解边值 问题。此时将一切未知量和基本方程都转换成用应力分量 来表示。通常当给定应力边界条件时,宜用此法。 (3)混合法:即以一部分位移分量和一部分应力分量作为 基本未知量,来混合求解边值问题。显然,这种方法适宜 于求解混合边值问题。
第五章 弹性与塑性 力学的基本解法
对于平面问题(以平面应力为例)
几何方程
u x x
物理方程
将几何方程代入物理方程
E u v x ( ) 2 1 x y E v u y ( ) 2 1 y x
E x ( x y ) 2 1 E y ( y x ) 2 1
d 3 d 2
p
五个方程 一个方程 一个方程
E d m 3k d m d m 1 2
Sij= eij
五个方程 一个方程 一个方程
李田军弹塑性力学课件
eij Sij
m=K
2 3
6
第五章 弹性与塑性 力学的基本解法
4、静力边界条件和位移边界条件: ijlj=Fi (在ST上) ui=ui (在Su上)
纯弹性区
加载区 卸载区
2011年4月13日星期三
在它们的分界面上,应 力和应变应满足一定的 连续条件和间断条件。
李田军弹塑性力学课件 12
第五章 弹性与塑性 力学的基本解法
§5-2
按位移求解弹性力学问题
由于塑性力学问题的复杂性和特殊性,需要专门进行 讨论。鉴于学时所限,这里仅讨论弹性力学问题的基 本求解方法。 弹性力学问题:就是分析各种结构物或其构件在弹性
第五章 弹性与塑性 力学的基本解法
对于平面问题(以平面应力为例)
几何方程
u x x
物理方程
将几何方程代入物理方程
E u v x ( ) 2 1 x y E v u y ( ) 2 1 y x
E x ( x y ) 2 1 E y ( y x ) 2 1
d 3 d 2
p
五个方程 一个方程 一个方程
E d m 3k d m d m 1 2
Sij= eij
五个方程 一个方程 一个方程
李田军弹塑性力学课件
eij Sij
m=K
2 3
6
第五章 弹性与塑性 力学的基本解法
4、静力边界条件和位移边界条件: ijlj=Fi (在ST上) ui=ui (在Su上)
纯弹性区
加载区 卸载区
2011年4月13日星期三
在它们的分界面上,应 力和应变应满足一定的 连续条件和间断条件。
李田军弹塑性力学课件 12
第五章 弹性与塑性 力学的基本解法
§5-2
按位移求解弹性力学问题
由于塑性力学问题的复杂性和特殊性,需要专门进行 讨论。鉴于学时所限,这里仅讨论弹性力学问题的基 本求解方法。 弹性力学问题:就是分析各种结构物或其构件在弹性
弹塑性力学 弹性与塑性力学的解题方法

既能找出变形体中各点的应力分量,也能找出相 对的位移增量分量。
➢主应力法
➢ 主应力法是金属塑性成形中所经常使用的 一种简化方法。在分析问题时,认为剪应 力对材料的屈服影响很小,因而在屈服条 件中略去剪应力,这时平面应变问题中的 屈服条件可简化为
x - y = 2k
➢ 在分析中,还假设应力在一个方向的分布 是均匀的。因此在计算中,数学形式比较 简便。
➢ 平面应力问题,平面应变问题,结果转换 ➢ 平面问题的平衡方程(无体力)
x
xy
0
x y
yx x
y
y
0
➢ 艾里(Airy)应力函数
x
2
y 2
,
y
2
x 2
,
xy
2
xy
➢ 用应力函数表示的物理方程
➢ 变形协调条件
x
1 2G(1
)
2
y 2
2
x 2
y
2G
1 (1
)
2
x 2
几种应力函数所对应的边界条件
➢ = ax + by + c 矩形弹性体处于无应力状态,
即在边界上无面力。
➢ = ax2 + bxy + cy2 矩形弹性体受双向荷载。
a > 0, c > 0, b = 0
a = c = 0, b 0
➢ = ax3 + bx2y + cxy2 + dy3 复杂应力状态, 当a = c = b = 0, d 0时,xy = 6dy,为纯弯
2
y 2
xy
1 G
2
xy
4 x
y 4
4 y
x 4
➢主应力法
➢ 主应力法是金属塑性成形中所经常使用的 一种简化方法。在分析问题时,认为剪应 力对材料的屈服影响很小,因而在屈服条 件中略去剪应力,这时平面应变问题中的 屈服条件可简化为
x - y = 2k
➢ 在分析中,还假设应力在一个方向的分布 是均匀的。因此在计算中,数学形式比较 简便。
➢ 平面应力问题,平面应变问题,结果转换 ➢ 平面问题的平衡方程(无体力)
x
xy
0
x y
yx x
y
y
0
➢ 艾里(Airy)应力函数
x
2
y 2
,
y
2
x 2
,
xy
2
xy
➢ 用应力函数表示的物理方程
➢ 变形协调条件
x
1 2G(1
)
2
y 2
2
x 2
y
2G
1 (1
)
2
x 2
几种应力函数所对应的边界条件
➢ = ax + by + c 矩形弹性体处于无应力状态,
即在边界上无面力。
➢ = ax2 + bxy + cy2 矩形弹性体受双向荷载。
a > 0, c > 0, b = 0
a = c = 0, b 0
➢ = ax3 + bx2y + cxy2 + dy3 复杂应力状态, 当a = c = b = 0, d 0时,xy = 6dy,为纯弯
2
y 2
xy
1 G
2
xy
4 x
y 4
4 y
x 4
弹塑性力学___第四章_弹性力学的求解方法

叠加原理:弹性体受几组外力同时作用时的解等于每一组外力单 独作用时对应解的和。
叠加原理成立的条件:小变形条件(平衡、几何方程才 为线性的),弹性本构方程(虎克定律)。
4-5塑性力学最简单的问题、求解塑性力学的问题
在塑性力学中,有些问题在平衡方程和屈服条件 中的未知函数和议程式的数目相等,因而结合边 界条件一般便可找出弹塑性体或结构中应力分布 的规律。而应变和位移再根据本构方程和几何方 程或连续性条件分别求出。这种仅通过平衡方程、 屈服条件就能完全确定应力场的问题属静定问题 (称为塑性力学最简单问题)
(2)应变协调方程(变形连续必条件)(变形相容条件)
可缩写为:
上述方程是六个应变分量 保证三个位移分量 连续函数(保持连续)的条件。 为单值
3、本构方程(物性方程)
(1)在弹性变形阶段,且屈服函数 则有
如用应变表示应力,则有
为了与塑性变形本构方程对比,也可将本构方程表示为
(2)在弹塑性变形阶段,屈服函数
1. 平衡(或运动方程)
若等式右式不等零,即表示物体内质点处于运动状态, 则根据理论力学中的达朗伯原理需将上式右端等于括号 内的惯性力项。 方程只表明物体内一点的应力状态与其邻点的应力 状态之间在平衡(或运动)时所满足的关系。
2. 几何方程与应变协调方程
(1)几何方程
此式表明在小变形条件下,物体内一点附近的变形情况和该点的 应变状态之间的关系。
第四章 弹塑性力学基础理论的建立及基本解法
§4-1 弹塑性力学基本理论的建立 弹塑性力学的任务:研究各种具体几何尺寸的
弹性、弹塑性体或刚塑性体在各种几何约束及 承受不同外力作用时、发生于其内部的应力分 布与变形(或位移)规律。
与材料力学一样,弹塑性力学所求解的大多 数问题是超静定问题,因此其基础理论的 建立来自三个方面的客观规律:平衡方 程 ;几何方程 ;本构方程
弹塑性力学弹性力学的求解方法模板

部分应力分量作为基本未知量混合求解。
位移法、应力法、混合法统称为直接求解法。
由于这些方法在数学上的困难和复杂性,人们又研究了 各种解题方法:(1)逆解法(2)半逆解法(或凑合解 法)(3)迭代法
? 求解物理量: 6个应力分量 6 个应变分量 3 个位移分量
共15个未知量
用于求解的方程:平衡微分方程 3个
叠加原理 实际结构件往往同时受到几组载荷作用,如果直接求所有载荷作 用下的弹性力学问题的解,可能很复杂。而求单一载荷作用下的 弹性力学问题的解,一般更简单。
通过求不同单一载荷作用下的弹性力学问题的解,再用叠加 方法获得复杂载荷的解的过程称为 解的叠加原理。
叠加原理:弹性体受几组外力同时作用时的解等于每一组外力单 独作用时对应解的和。
(2)应变协调方程(变形连续必条件)(变形相容条件)
可缩写为: 上述方程是六个应变分量 保证三个位移分量 为单值 连续函数(保持连续)的条件。
3、本构方程(物性方程)
(1)在弹性变形阶段,且屈服函数
则有
如用应变表示应力,则有
为了与塑性变形本构方程对 弹塑性力学基础理论的建立及基本解法
§4-1 弹塑性力学基本理论的建立 弹塑性力学的任务:研究各种具体几何尺寸的
弹性、弹塑性体或刚塑性体在各种几何约束及 承受不同外力作用时、发生于其内部的应力分 布与变形(或位移)规律。
与材料力学一样,弹塑性力学所求解的大多 数问题是超静定问题,因此其基础理论的 建立来自三个方面的客观规律:?平衡方 程 ;?几何方程 ;?本构方程
叠加原理成立的条件 :小变形条件 (平衡、几何方程才 为线性的), 弹性本构方程 (虎克定律)。
4-5塑性力学最简单的问题、求解塑性力学的问题
在塑性力学中,有些问题在平衡方程和屈服条件 中的未知函数和议程式的数目相等,因而结合边 界条件一般便可找出弹塑性体或结构中应力分布 的规律。而应变和位移再根据本构方程和几何方 程或连续性条件分别求出。这种仅通过平衡方程、 屈服条件就能完全确定应力场的问题属静定问题 (称为塑性力学最简单问题)
位移法、应力法、混合法统称为直接求解法。
由于这些方法在数学上的困难和复杂性,人们又研究了 各种解题方法:(1)逆解法(2)半逆解法(或凑合解 法)(3)迭代法
? 求解物理量: 6个应力分量 6 个应变分量 3 个位移分量
共15个未知量
用于求解的方程:平衡微分方程 3个
叠加原理 实际结构件往往同时受到几组载荷作用,如果直接求所有载荷作 用下的弹性力学问题的解,可能很复杂。而求单一载荷作用下的 弹性力学问题的解,一般更简单。
通过求不同单一载荷作用下的弹性力学问题的解,再用叠加 方法获得复杂载荷的解的过程称为 解的叠加原理。
叠加原理:弹性体受几组外力同时作用时的解等于每一组外力单 独作用时对应解的和。
(2)应变协调方程(变形连续必条件)(变形相容条件)
可缩写为: 上述方程是六个应变分量 保证三个位移分量 为单值 连续函数(保持连续)的条件。
3、本构方程(物性方程)
(1)在弹性变形阶段,且屈服函数
则有
如用应变表示应力,则有
为了与塑性变形本构方程对 弹塑性力学基础理论的建立及基本解法
§4-1 弹塑性力学基本理论的建立 弹塑性力学的任务:研究各种具体几何尺寸的
弹性、弹塑性体或刚塑性体在各种几何约束及 承受不同外力作用时、发生于其内部的应力分 布与变形(或位移)规律。
与材料力学一样,弹塑性力学所求解的大多 数问题是超静定问题,因此其基础理论的 建立来自三个方面的客观规律:?平衡方 程 ;?几何方程 ;?本构方程
叠加原理成立的条件 :小变形条件 (平衡、几何方程才 为线性的), 弹性本构方程 (虎克定律)。
4-5塑性力学最简单的问题、求解塑性力学的问题
在塑性力学中,有些问题在平衡方程和屈服条件 中的未知函数和议程式的数目相等,因而结合边 界条件一般便可找出弹塑性体或结构中应力分布 的规律。而应变和位移再根据本构方程和几何方 程或连续性条件分别求出。这种仅通过平衡方程、 屈服条件就能完全确定应力场的问题属静定问题 (称为塑性力学最简单问题)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
➢ 已知部分边界载荷及部分边界位移,求应力场 、应变场 和位移 ——混合边值问题。 15个未知量:应力分量6个,应变分量6个,位移分量3个 15个方程:应力平衡微分方程(3),几何方程(6), 物理方程(6) 理论上可解,实际上并不可解。为什么?
第六章 弹性力学基本求解方法
弹性力学的基本求解方法
2
2 x2
2
y拉2 普拉斯算子)
可以证明,应力满足了相容方程,也就满足了应力平衡条件。
第六章 弹性力学基本求解方法
应力函数的引入
定义:
x
2
y 2
y
2
x 2
xy
2
xy
条件:① ~ ij ;
②应力平衡微分方程;
③相容方程。
平面问题:(直角坐标系)
4
x4
2
4
x2x
2
4
y 4
0
或
22 0
第六章 弹性力学基本求解方法
❖应力函数——逆解法
于是有应力分量:
x
2
y 2
30Bx2 y 20By3
6cy
y
2
x2
ry
10By3
2Dy
ry
xy
2
xy
30Bxy3
2Dx
利用边界条件:
((xyy
) )
y y
h h
/ /
2 2
0 0
h/2
(
M
)
x
l 2
h/2
x
ydy
0
第六章 弹性力学基本求解方法
(c 0)
满足相容方程 22 0
x 2c , y xy 0
x方向受单向拉应力作用(如图6-1(b))。
第六章 弹性力学基本求解方法
❖ 应力函数——逆解法
4.(x, y) bxy
(b 0)
满足相容方程 22 0
x y 0,
xy
2
xy
b
受纯剪应力作用 (如图6-1(c))。
ur
r0
(
r0 r
)2
由几何方程可得
r
ur r
2 ( r0 )3
r
ur r
( r0 )3
r
(-)压应变 (+)拉应变
第六章 弹性力学基本求解方法
❖位移法应用——错配球
由物理方程可得
r
2Gr
4G 1
( r0 r
)3
0
(压应力)
2G
EG 1
( r0 )3 r
0
(拉应力)
应变能密度(点): U0
r1
r0
r0
)
—— 错配度
分析:基体变形为球对称变形,则
ur 0 u u 0
边界条件:
r , ur 0 (符合圣维南原理)
第六章 弹性力学基本求解方法
❖位移法应用——错配球
根据应力平衡微分方程
R0
有
r r
1 r
r
r r sin
1 r
(2
r
r ctg ) 0
r
r
0
r
r
❖应力函数——半逆解法
解:分析:①水压 q gy ,单位坝体重 p gy
( , 分别为水和密体的密度)
② 在OA面上无面力(自由表面),在OB面上受水压 q 作用(线性面力), 因此,应力函数可以设计成坐标的三次函数。
(x, y) ax3 bx2y cxy2 dy3
(a, b, c, d为待定参数)
➢ 位移法:以位移作为未知量进行求解的方法
E 2u 1 2u 1 2v
1 2 (x2 2 y2 2 xy ) X 0
E 1 2
( 2v y2
1 2
2v x2
1 2
2u ) xy
Y
0
E 1 2
[( u x
v y
)s
m1 2
( u y
v x )s
]
X
1
E
2
[(
v y
u x
)s
l
gxctg2
第六章 弹性力学基本求解方法
❖ 位移法应用——错配球
如图,求金属体内错配球引起的应力场、应变场和应变能。
第六章 弹性力学基本求解方法
❖ 位移法应用——错配球
解:设基体为均质、各向同性体,基体质点半径为 r0,错配粒子为刚性
球, 半径为 r1 ,并有 r1 r0
则
r1
(1
)r0
,(
=
❖ 应力函数——逆解法
第六章 弹性力学基本求解方法
❖ 应力函数——逆解法
8.如图,简支梁受自重作用,比重力r,那么函数
Ax2 y3 By5 Cy3 Dx2 y
能否作其应力函数? 若能,求应力分量。
解:将代入双调和函数中,
可得只有当A+5B=0时,
才能满足 22 0 。
即当A=-5B时,题中函数 才可作应力函数。
➢ 应力函数 (stress function)
应力表示的相容方程(平面问题)
借助平衡微分方程把剪应力去掉,即由物理方程
可得
2 ( x2
2 y 2
)(
x
y)
(1 )(X x
Y y
)
在常体力下
X Y 0 x y
于是有
2 ( x2
2 y 2
)( x
y)
0
即 2 ( x y ) 0 , 其中
物理意义:表征应力的连续性。
1
2
(
v x
u y
)
s
]
Y
对于第一种边界条件 (平面问题)
对于第二种边界条件 (平面问题)
理论上可解,实际上弹性力学并没有沿着这种思路发展,但这种思路在 解空间问题时很有用。可以证明,用这种方法求解的位移肯定是连续的。
第六章 弹性力学基本求解方法
应力法:
以应力作为未知量进行求解的方法. 如何保证求解结果一定连续?
1 r
(2
r
) 0
(球对称问题的一般应力平衡微分方程)
由根据广义虎克定律
r
2Gr
2G
ur r
(
r
,
(1
E )(1
2)
拉梅常数)
第六章 弹性力学基本求解方法
❖位移法应用——错配球
由 u u 0 可得
ur , r
r
ur r
r
ur r
2 ur r
对于应力平衡微分方程, r 是r的函数,与θ和无关,故可写为
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
于是有应力分量:
③考察边界条件:
x x0 xy x0 0
gy
c d
0
1 6
g
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
在OA面上无应力,则
l( x )x ytg m( xy )x ytg 0 m( y )x ytg l( xy )x ytg 0 l cos m sin
1 2
ij
ij
1 2
( rr
)
6G
2 ( r0 r
)6
总应变能:
U
U0
4
r
2
dr
8
G
2r03
0r
(其中 、G、E为弹性常数)
第六章 弹性力学基本求解方法
6.1 弹性力学的基本方程
回顾: 应力平衡微分方程(3) 几何方程(6) 物理方程(6) 相容方程 边界条件方程
第六章 弹性力学基本求解方法
6.2 弹性力学的基本问题
➢ 已知表面载荷,求应力场 、应变场 和位移 ——力的边值问题;
➢ 已知表面位移,求应力场 、应场 ——位移边值问题;
受纯弯曲载荷作用(如图6-1(f))。
7.(x, y) ax4 bx3 y cx2 y2 dxy3 ey4
4
x4 24a ,
4
2 x2y2 8c ,
4
y4 24e
只有 24a 8c 24e 0 才能满足双调和函数的条件。所以4次 和4次以上的函数不能恒等地满足双调和函数的条件。
第六章 弹性力学基本求解方法
gyl 2bytg (6a ytg 2by
m0
gy)m
(2bytg
)
l
0
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
a b
g ctg
6
ctg2
2
3
gctg3
从而得坝体内的应力场为:
x gy
y ( gctg 2 gctg3)x ( gctg2 g) y
xy
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
思路:根据弹性体边界形状及受力特点,假设部分应力分量,再由 部分应力分量推导出应力函数,由应力函数推导出全部应力分量,再考 察这些应力分量是否满足边界条件。
半逆解法例题: 如图,水坝受水压和自重作用,
求坝体内的应力场。
第六章 弹性力学基本求解方法
❖应力函数——逆解法
于是可求得:
B
r 5h2
,C
l2r 4h2
10r,
D
3 4
r
x
所以 y
xy
第六章 弹性力学基本求解方法
❖应力函数——逆解法 总结:应力函数设计
1.集中载荷——按材料力学方法求解 2.均布载荷—— f (xi2 ) 3.线性分布载荷—— f (xi3 ) 4.非线性分布载荷—— f (xi4 xi8 )
第六章 弹性力学基本求解方法
❖ 逆解法(inverse resolution)
第六章 弹性力学基本求解方法
弹性力学的基本求解方法
2
2 x2
2
y拉2 普拉斯算子)
可以证明,应力满足了相容方程,也就满足了应力平衡条件。
第六章 弹性力学基本求解方法
应力函数的引入
定义:
x
2
y 2
y
2
x 2
xy
2
xy
条件:① ~ ij ;
②应力平衡微分方程;
③相容方程。
平面问题:(直角坐标系)
4
x4
2
4
x2x
2
4
y 4
0
或
22 0
第六章 弹性力学基本求解方法
❖应力函数——逆解法
于是有应力分量:
x
2
y 2
30Bx2 y 20By3
6cy
y
2
x2
ry
10By3
2Dy
ry
xy
2
xy
30Bxy3
2Dx
利用边界条件:
((xyy
) )
y y
h h
/ /
2 2
0 0
h/2
(
M
)
x
l 2
h/2
x
ydy
0
第六章 弹性力学基本求解方法
(c 0)
满足相容方程 22 0
x 2c , y xy 0
x方向受单向拉应力作用(如图6-1(b))。
第六章 弹性力学基本求解方法
❖ 应力函数——逆解法
4.(x, y) bxy
(b 0)
满足相容方程 22 0
x y 0,
xy
2
xy
b
受纯剪应力作用 (如图6-1(c))。
ur
r0
(
r0 r
)2
由几何方程可得
r
ur r
2 ( r0 )3
r
ur r
( r0 )3
r
(-)压应变 (+)拉应变
第六章 弹性力学基本求解方法
❖位移法应用——错配球
由物理方程可得
r
2Gr
4G 1
( r0 r
)3
0
(压应力)
2G
EG 1
( r0 )3 r
0
(拉应力)
应变能密度(点): U0
r1
r0
r0
)
—— 错配度
分析:基体变形为球对称变形,则
ur 0 u u 0
边界条件:
r , ur 0 (符合圣维南原理)
第六章 弹性力学基本求解方法
❖位移法应用——错配球
根据应力平衡微分方程
R0
有
r r
1 r
r
r r sin
1 r
(2
r
r ctg ) 0
r
r
0
r
r
❖应力函数——半逆解法
解:分析:①水压 q gy ,单位坝体重 p gy
( , 分别为水和密体的密度)
② 在OA面上无面力(自由表面),在OB面上受水压 q 作用(线性面力), 因此,应力函数可以设计成坐标的三次函数。
(x, y) ax3 bx2y cxy2 dy3
(a, b, c, d为待定参数)
➢ 位移法:以位移作为未知量进行求解的方法
E 2u 1 2u 1 2v
1 2 (x2 2 y2 2 xy ) X 0
E 1 2
( 2v y2
1 2
2v x2
1 2
2u ) xy
Y
0
E 1 2
[( u x
v y
)s
m1 2
( u y
v x )s
]
X
1
E
2
[(
v y
u x
)s
l
gxctg2
第六章 弹性力学基本求解方法
❖ 位移法应用——错配球
如图,求金属体内错配球引起的应力场、应变场和应变能。
第六章 弹性力学基本求解方法
❖ 位移法应用——错配球
解:设基体为均质、各向同性体,基体质点半径为 r0,错配粒子为刚性
球, 半径为 r1 ,并有 r1 r0
则
r1
(1
)r0
,(
=
❖ 应力函数——逆解法
第六章 弹性力学基本求解方法
❖ 应力函数——逆解法
8.如图,简支梁受自重作用,比重力r,那么函数
Ax2 y3 By5 Cy3 Dx2 y
能否作其应力函数? 若能,求应力分量。
解:将代入双调和函数中,
可得只有当A+5B=0时,
才能满足 22 0 。
即当A=-5B时,题中函数 才可作应力函数。
➢ 应力函数 (stress function)
应力表示的相容方程(平面问题)
借助平衡微分方程把剪应力去掉,即由物理方程
可得
2 ( x2
2 y 2
)(
x
y)
(1 )(X x
Y y
)
在常体力下
X Y 0 x y
于是有
2 ( x2
2 y 2
)( x
y)
0
即 2 ( x y ) 0 , 其中
物理意义:表征应力的连续性。
1
2
(
v x
u y
)
s
]
Y
对于第一种边界条件 (平面问题)
对于第二种边界条件 (平面问题)
理论上可解,实际上弹性力学并没有沿着这种思路发展,但这种思路在 解空间问题时很有用。可以证明,用这种方法求解的位移肯定是连续的。
第六章 弹性力学基本求解方法
应力法:
以应力作为未知量进行求解的方法. 如何保证求解结果一定连续?
1 r
(2
r
) 0
(球对称问题的一般应力平衡微分方程)
由根据广义虎克定律
r
2Gr
2G
ur r
(
r
,
(1
E )(1
2)
拉梅常数)
第六章 弹性力学基本求解方法
❖位移法应用——错配球
由 u u 0 可得
ur , r
r
ur r
r
ur r
2 ur r
对于应力平衡微分方程, r 是r的函数,与θ和无关,故可写为
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
于是有应力分量:
③考察边界条件:
x x0 xy x0 0
gy
c d
0
1 6
g
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
在OA面上无应力,则
l( x )x ytg m( xy )x ytg 0 m( y )x ytg l( xy )x ytg 0 l cos m sin
1 2
ij
ij
1 2
( rr
)
6G
2 ( r0 r
)6
总应变能:
U
U0
4
r
2
dr
8
G
2r03
0r
(其中 、G、E为弹性常数)
第六章 弹性力学基本求解方法
6.1 弹性力学的基本方程
回顾: 应力平衡微分方程(3) 几何方程(6) 物理方程(6) 相容方程 边界条件方程
第六章 弹性力学基本求解方法
6.2 弹性力学的基本问题
➢ 已知表面载荷,求应力场 、应变场 和位移 ——力的边值问题;
➢ 已知表面位移,求应力场 、应场 ——位移边值问题;
受纯弯曲载荷作用(如图6-1(f))。
7.(x, y) ax4 bx3 y cx2 y2 dxy3 ey4
4
x4 24a ,
4
2 x2y2 8c ,
4
y4 24e
只有 24a 8c 24e 0 才能满足双调和函数的条件。所以4次 和4次以上的函数不能恒等地满足双调和函数的条件。
第六章 弹性力学基本求解方法
gyl 2bytg (6a ytg 2by
m0
gy)m
(2bytg
)
l
0
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
a b
g ctg
6
ctg2
2
3
gctg3
从而得坝体内的应力场为:
x gy
y ( gctg 2 gctg3)x ( gctg2 g) y
xy
第六章 弹性力学基本求解方法
❖应力函数——半逆解法
思路:根据弹性体边界形状及受力特点,假设部分应力分量,再由 部分应力分量推导出应力函数,由应力函数推导出全部应力分量,再考 察这些应力分量是否满足边界条件。
半逆解法例题: 如图,水坝受水压和自重作用,
求坝体内的应力场。
第六章 弹性力学基本求解方法
❖应力函数——逆解法
于是可求得:
B
r 5h2
,C
l2r 4h2
10r,
D
3 4
r
x
所以 y
xy
第六章 弹性力学基本求解方法
❖应力函数——逆解法 总结:应力函数设计
1.集中载荷——按材料力学方法求解 2.均布载荷—— f (xi2 ) 3.线性分布载荷—— f (xi3 ) 4.非线性分布载荷—— f (xi4 xi8 )
第六章 弹性力学基本求解方法
❖ 逆解法(inverse resolution)