系统辨识大作业加学习心得
系统辨识读书报告

系统辨识的读书报告经过对系统辨识半个学期的课上学习和课下的论文查阅,我已经对系统辨识有了一定的认识和了解。
它是伴随着现代控制理论的产生而发展起来的一门独立的学科,系统辨识(System Identification)就是假设系统输入U(t)和输出Y(t)已知,求系统的传递函数G(s),即通过采集系统的输入输出数据来研究确定系统数学模型的理论和方法。
系统辨识有很多用途,在现代社会中也变得越来越重要。
凡是需要通过实验数据确定数学模型和估计参数的场合都要利用辨识技术,辨识技术现在已经推广到工程和非工程的许多领域,如化学化工过程、核反应堆、电力系统、航空航天飞行器、生物医学系统、社会经济系统、环境系统、生态系统等。
在预测方面,系统辨识的目的是用系统的可测量的输入和输出去预测系统输出的未来的演变。
例如最常见的气象预报,洪水预报,其他如太阳黑子预报,市场价格的预测,河流污染物含量的预测等。
而在控制领域,系统辨识是利用描述控制系统动态特性的数学模型设计控制器,来更好的对系统进行控制。
系统辨识的核心就是采集系统的输入输出数据来研究确定系统数学模型,由于建立数学描述的目的是要帮助分析和解决实际问题,认识客观世界,因此,所构建的模型最终要应用到现实世界中去,也就是说,作为被控对象进行控制,抽象出的模型必须能够代表原系统。
建立研究对象的数学模型主要有两条途径。
第一条途径是利用人们已有的关于对象的知识(如利用物理规律、能量和质量守恒方程及系统部件之间的关系等),通过对对象自身运动机理的分析确定研究对象的数学结构和参数,从理论上推导出对象的数学模型,得到的模型称为理论模型。
由于客观世界运动关系的复杂和人类认识水平的局限,理论模型的建立特别是对复杂对象来说是非常困难的,一般都需要大量简化条件和假设,而且这类模型的数学求解过程异常复杂,难以理解,甚至不可获得,更难以指导实践和在实际工程中推广应用。
建立数学模型的第二条途径源于现代系统理论的发展与应用,它是根据对一个已经存在的对象或系统的观察、测量所得到的大量的输入、输出数据,推断出被研究对象的数学模型,这就是系统辨识过程,得到的数学模型称为经验模型。
大作业心得体会
大作业心得体会作为一名学生,大作业是我在学习过程中面临的一个重要任务。
它是我在课堂上所学理论知识的实践运用,并对我今后的学习和职业发展具有重要影响。
通过完成大作业,我深刻体会到了自己的不足和进步,也意识到了一些宝贵的心得和体会。
首先,大作业需要良好的组织和规划能力。
在开始我的大作业之前,我需要清楚地了解要完成的任务内容和要求,并制定合理的计划。
这需要我对自己的时间管理能力有一个清晰的认识,以便有效地安排每一个任务和阶段的完成时间。
在完成过程中,我需要根据计划不断调整自己的进度,并对完成的情况进行及时的反馈和评估。
通过这一过程,我意识到规划和组织能力是取得成功的关键。
其次,大作业对于我专业知识的运用和技能的提升有着重要作用。
在大作业中,我需要运用我在课堂上学到的理论知识来解决实际问题。
这不仅考验了我对于知识的掌握程度,也要求我具备批判性思维和创新性思维的能力。
通过与同学和老师的交流和讨论,我不断学习和提高自己的专业技能,提升了我的学习能力和解决问题的能力。
第三,大作业让我深刻体会到团队协作的重要性。
在大作业中,我需要与团队成员协力合作,共同完成任务。
这要求我与团队成员之间的沟通和协作,共同制定计划并分工合作,共同解决问题和应对挑战。
通过与团队成员的交流和合作,我学会了倾听他人的意见和建议,学会了在团队中发挥自己的优势和承担自己的责任。
这些经验对我今后的职业生涯和人际交往能力的提升都具有重要意义。
最后,大作业让我认识到坚持和毅力的重要性。
大作业是一个长期的任务,要求我不断克服困难和挑战,保持自己的动力和积极性。
在完成大作业的过程中,我经历了挫折和困惑,但通过持续的努力和坚持不懈的精神,我最终完成了任务。
这个过程让我明白了坚持和毅力不仅在大作业中重要,在今后的学习和职业生涯中也是不可或缺的品质。
总的来说,大作业是一个对于我学习和成长具有重要意义的任务。
通过完成大作业,我提高了自己的组织和规划能力,提升了自己的专业知识和技能,学会了团队协作和交流,并培养了自己的坚持和毅力。
系统个人学习心得体会范文
千里之行,始于足下。
系统个人学习心得体会范文系统个人学习心得体会》近年来,随着信息技术的快速发展和社会进步的需求,系统学习成为了当今社会中一个不可或缺的能力。
个人也通过系统学习实现了自身的不断成长与进步。
下面我将结合自身经历,分享一些个人的学习心得体会。
首先,系统学习对于个人成长起到了关键的作用。
通过系统学习,我掌握了更深入、更全面的知识和技能。
每天都有新的发现,新的收获,这增强了我的信心和动力,激发了我对学习的深刻兴趣。
我逐渐意识到,学习不仅仅是为了应付考试,更是为了探索未知、追求真理,实现自己的人生价值。
其次,系统学习帮助我更好地规划学习过程和目标。
在系统学习的过程中,我首先会制定合理的学习计划,确定自己的学习目标和时间安排。
这有助于我明确自己的学习重点,并且有针对性地去学习和掌握知识。
同时,我会制定适当的学习方法和策略,提高学习效率。
像是用关键词法整理笔记、与他人分享学习心得、不断反思总结等,这些方法都使我能够更好地消化和理解学习内容。
此外,系统学习还帮助我提高了自主学习能力和解决问题的能力。
在学习过程中,我开始时候会遇到各种困难和障碍,但我逐渐学会了独立思考和自主解决问题。
通过各种资源的寻找和利用,我能够找到解决问题的途径,进而攻克难关。
这提高了我的自信心和学习动力,让我在学习过程中感受到了成长和进步的快乐。
另外,系统学习也培养了我良好的学习习惯和工作方法。
我坚持每天定时定量地学习,养成了良好的复习和巩固知识的习惯。
我还善于总结,将学习的第1页/共2页锲而不舍,金石可镂。
知识和经验整理成文档和笔记,方便日后的查阅和回顾。
这些学习习惯和工作方法使我更加高效地利用时间,提高了我的学习效果。
最后,系统学习也提醒我要注重与他人的合作和交流。
在系统学习的过程中,我会组织小组讨论和团队项目,与同学们进行交流和合作。
通过与他人的互动和合作,我能够拓展自己的思维和视野,获取更多的知识和观点。
同时,与他人的交流也促进了我对自己学习的反思和提高,使自己的学习变得更加全面和深入。
系统分析与设计心得(精选多篇)
系统分析与设计心得(精选多篇)第一篇:系统分析与设计心得系统分析师对考生的综合素质要求较高,考查的知识面很广。
但分析历年考题可以发现,虽然考试知识面广但考试内容并不是很深。
因此,这就要求我们注意平时积累,经常通过络、讲座、学术会议等途径及时了解一些流行技术热点和业界最新动态。
【注意点:注意平时积累,关注技术热点和业界动态。
】2、多做项目,在实践中锻炼提高如果说平时积累的各个知识点是一粒粒宝贵的珍珠的话,那么项目经历则是将这些珍珠串联起来的一根红线。
“纸上得来终觉浅,绝知此事要躬行”。
软件工程是一门实践性、综合性非常强的专业,如果没有参加过完整的实际项目,就难以从根本上理解书本上所学的理论知识,就难以真正领会软件工程的思想精髓。
同时,在做项目时还要勤于思考,无论是作为主持者还是作为一个普通的程序员,都应该去潜心思考为什么要这样设计、这样设计的优点是什么、有哪些不足,如果你是设计师的话你又会怎样设计?经常做这样的换位思考,会不自觉地提高自己的系统分析和设计能力,积累丰富的项目经验,这对下午一的考试来说是非常有益的。
【注意点:勤于思考。
】3、注意提高个人档编写能力一些软件工程师有个不的习惯,那就是只喜欢钻研具体的技术点而不注重提高档编写能力。
他们的一个通病是做得多、写得少,在某一个具体的技术领域上往往表现得非常优秀,但写出的档质量实在难以恭维。
作为一个合格的系统分析师档编写能力是必不可少的基本素质,也是下午二考试的考查重点。
档编写能力不仅对于应试是十分必要的,而且在实际也是非常重要的。
因此,我们应当在平时多做这方面的训练,多思考、多动笔,努力提高自己档编写能力。
【注意点:实际中的档编写能力。
】4、掌握评卷专家心理,注意论写作技巧在下午二的考试中,应注意把握评卷专家的心理状况。
根据希赛it教育研发中心的著名软考专家张友生所说的,评卷专家不可能把你的论一字一句地精读,要让他短时间内了解你的论内容并认可你的能力,必须把握主次关系,论的组织一定要条理清晰。
系统辨识实验报告
i=1:800; figure(1) plot(i,Theta(1,:),i,Theta(2,:),i,Theta(3,:),i,Theta(4,:),i,Theta(5,:),i,T title('待估参数过渡过程') figure(2) plot(i,Pstore(1,:),i,Pstore(2,:),i,Pstore(3,:),i,Pstore(4,:),i,Pstore(5,: title('估计方差变化过程')
最小二乘法建模:
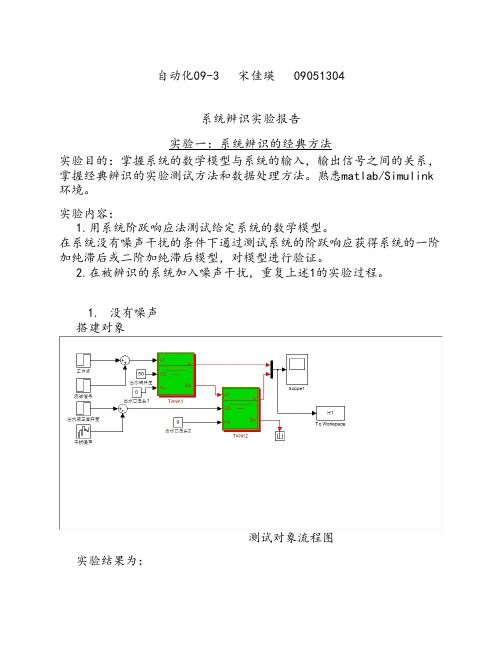
二、三次实验 本次实验要完成的内容: 1.参照index2,设计对象,从workspace空间获取数据,取二阶,三阶 对象实现最小二乘法的一次完成算法和最小二乘法的递推算法(LS and RLS); 2.对设计好的对象,在时间为200-300之间,设计一个阶跃扰动,用最 小二乘法和带遗忘因子的最小二乘法实现,对这两种算法的特点进行说 明; 实验内容结果与程序代码: 利用LS和RLS得到的二阶,三阶参数 算法 阶次 A1 A2 A3 B0 B1 B2 B3 LS 二阶 -0.78420.1373 -0.00360.5668 0.3157 RLS 二阶 -0.78240.1373 -0.00360.5668 0.3157 LS 三阶 -0.4381-0.12280.0407 -0.00780.5652 0.5106 0.1160
测试对象流程图 实验结果为:
2、加入噪声干扰 搭建对象
实验结果:
加入噪声干扰之后水箱输出不平稳,有波动。
实验二:相关分析法 搭建对象:
处理程序: for i=1:15 m(i,:)=UY(32-i:46-i,1);
end y=UY(31:45,2); gg=ones(15)+eye(15); g=1/(25*16*2)*gg*m*y; plot(g); hold on; stem(g); 实验结果: 相关分析法
系统辨识读文体会--罗才宝
“工控中的最小二乘法辨识技术应用”读文体会递推最小二乘法的应用系统辨识大作业班级:09自动化专业:自动化姓名:罗才宝学号:0953505008基于递推最小二乘法的主蒸汽温度控制系统辨识与优化高思1, 康静秋2, 杨振勇2, 李卫华21. 华北电力大学控制与计算机工程学院,北京1022062. 华北电力科学研究院有限责任公司,北京100045[摘要] 采用递推最小二乘法对主蒸汽温度控制系统进行闭环辨识,依据串级控制结构的特点,通过双线性变换法转换辨识模型及划分辨识环节, 从而推导得出辨识参数方程; 基于时间乘绝对误差的积分准则( ITAE)实现PID 参数的离线优化, 并在仿真模型上验证了上述方法的有效性。
将该辨识模型用于某电厂600 MW 机组主蒸汽温度控制系统PID参数的优化,结果表明主蒸汽温度控制系统动态调节性能显著提高,同时可达到离线优化控制系统的目的。
[关键词] 递推最小二乘法;闭环辨识;模型;主蒸汽温度;控制系统; PID 参数[中图分类号] O231; T K323[文献标识码] A[文章编号] 1002 -3364( 2011) 06 -0029 -05[DOI 编号] 10. 3969/ j. issn. 1002 -3364. 2011. 06. 029IDENTIFICATION AND OPTIMIZA TION OF THE MAIN STEAM TEMPERA TURECONTROL SYSTEM BASED ON THE RECURSIVE LEAST SQUARE METHODGAO Si1, KANG Jing qiu2, YANG Zhenyong2, LI Weihua21. Col lege of Cont rol and Comput er Engin eering, North China El ectri c Pow er Un iversit y, Beijing 102206, PRC2. North Ch ina Elect ric Pow er Science Res each Inst itut e Co Ltd, Beijing 100045, PRCAbstract:By adopt ing the recursive least squar e method, a close -loop ident i f icat ion of the main steamtemperatur e contr ol sy stem has been car ried out . Based on featur es of the cascade contr ol st ructure, andthrough double linear i ty t ransfo rmat ion model, the identif icat io n mo del has been co nv erted, and the - identif icat io n links being divided, thereby, the ident ificat ion par ameter equat ion being deducted and ob -tained. Based on the integ rat ion cri terion of t ime multiplying absoluteerr or, the o ff -line opt imizat ion ofPID parameters has been r ealized, and the ef fect iveness of above -ment io ned method being verif ied onthe emulat ion model. T he said ident if ication model has been used for opt imizat io n o f PID parameter s inthe main steam temperature cont rol system o f o ne 600 MW unit, result s show that the dy namic regula -t io n performance o f the main steam temperature co nt ro l system has been remarkably enhanced, at thesame t ime, the target o f of f -line o pt imizat io n fo r the co nt ro l system can be reached.Key words: r ecur sive least squar e method; close -loo p identif icat io n; model; main steam temperature; control system; PID parameter 火电机组的主蒸汽温度控制通常采用串级控制方式, 实际行中的PID 参数整定方法多为阶跃响应试验法和试凑法(依据经验) ,需要进行开环扰动试验,会对机组运行造成较大影响。
系统辨识大作业加学习心得
论文系统辨识姿态角控制1.系统辨识概述辨识、状态估计和控制理论是现代控制理论三个相互渗透的领域。
辨识和状态估计离不开控制理论的支持,控制理论的应用又几乎不能没有辨识和状态估计技术。
随着控制过程复杂性的提高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。
然而在大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,因此利用控制理论去解决实际问题时,首先需要建立被控对象的数学模型。
系统辨识正是适应这一需要而形成的,他是现代控制理论中一个很活跃的分支。
社会科学和自然科学领域已经投入相当多的人力去观察、研究有关的系统辨识问题。
系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。
从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。
辨识问题可以归结为用一个模型来表示可观系统(或将要改造的系统)本质特征的一种演算,并用这个模型吧对客观系统的理解表示成有用的形式。
当然可以刻有另外的描述,辨识有三个要素:数据,模型类和准则。
辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型。
总而言之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合所关心的实际过程的静态或动态特性。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类{}M(即给定一类已知结构的模型),一类输入信号u和等价准则(,)JLyyM(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择是误差函数J达到最小的模型,作为辨识所要求的结果。
系统学习心得(优秀5篇)
系统学习心得(优秀5篇)系统学习心得篇1最近,我有幸参加了一个为期两周的计算机系统学习班,我们的导师是一位经验丰富的讲师,他曾在这个领域工作了超过十年,拥有丰富的经验和广泛的知识。
在开始学习之前,我对计算机系统知之甚少,我只知道一些基本的操作,如打开、关闭电脑,使用Word和Excel等。
然而,随着课程的深入,我逐渐了解到计算机系统是如何工作的,从硬件的基本结构,到操作系统、应用程序、网络和数据库等。
在这个过程中,我遇到了一些挑战,如理解计算机硬件的工作原理、学习复杂的编程语言和算法等。
但是,我很快就发现,讲师和同学们都非常乐意帮助我。
他们总是在我不明白时停下来,给我解释更详细的信息,并帮助我解决遇到的问题。
这让我感到非常温暖和感激。
学习计算机系统课程对我的学习和职业生涯都有着巨大的帮助。
我了解到计算机系统的复杂性,以及如何优化系统性能、避免安全问题、编写高效的代码等。
同时,我也获得了更广泛的专业知识,这些知识在我未来的学习和工作中将发挥重要作用。
在学习过程中,我特别喜欢讲师提到的一些关键概念,如计算机体系结构、计算机网络、操作系统和数据库系统等。
这些概念对于我理解计算机系统的工作原理非常有帮助。
此外,通过参与小组讨论和项目,我学会了如何更有效地与团队合作,如何解决问题和评估自己的进度。
总的来说,这次学习经历对我来说非常宝贵。
我不仅学到了很多有用的知识和技能,还学会了如何更好地学习和解决问题。
我深刻地认识到,计算机系统学习是一个不断学习和进步的过程,需要持续的努力和耐心。
但是,我相信我已经迈出了正确的一步,未来我将继续在这个领域探索和学习。
系统学习心得篇2以下是一份系统学习心得,你可以根据自己的实际情况进行修改:我,一个非计算机专业的学生,在过去的几个月里,我深入地学习了Python 编程语言,并参与了一个完整的项目开发流程。
这个项目由我主导,从需求分析到设计,再到编程和测试,最后成功地完成了整个项目。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论文系统辨识姿态角控制1.系统辨识概述辨识、状态估计和控制理论是现代控制理论三个相互渗透的领域。
辨识和状态估计离不开控制理论的支持,控制理论的应用又几乎不能没有辨识和状态估计技术。
随着控制过程复杂性的提高,控制理论的应用日益广泛,但其实际应用不能脱离被控对象的数学模型。
然而在大多数情况下,被控对象的数学模型是不知道的,或者在正常运行期间模型的参数可能发生变化,因此利用控制理论去解决实际问题时,首先需要建立被控对象的数学模型。
系统辨识正是适应这一需要而形成的,他是现代控制理论中一个很活跃的分支。
社会科学和自然科学领域已经投入相当多的人力去观察、研究有关的系统辨识问题。
系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。
从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。
辨识问题可以归结为用一个模型来表示可观系统(或将要改造的系统)本质特征的一种演算,并用这个模型吧对客观系统的理解表示成有用的形式。
当然可以刻有另外的描述,辨识有三个要素:数据,模型类和准则。
辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型。
总而言之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合所关心的实际过程的静态或动态特性。
通过辨识建立数学模型的目的是估计表征系统行为的重要参数,建立一个能模仿真实系统行为的模型,用当前可测量的系统的输入和输出预测系统输出的未来演变,以及设计控制器。
对系统进行分析的主要问题是根据输入时间函数和系统的特性来确定输出信号。
对系统进行控制的主要问题是根据系统的特性设计控制输入,使输出满足预先规定的要求。
而系统辨识所研究的问题恰好是这些问题的逆问题。
通常,预先给定一个模型类{}M(即给定一类已知结构的模型),一类输入信号u和等价准则(,)JLyyM(一般情况下,J是误差函数,是过程输出y和模型输出yM的一个泛函);然后选择是误差函数J达到最小的模型,作为辨识所要求的结果。
系统辨识包括两个方面:结构辨识和参数估计。
在实际的辨识过程中,随着使用的方法不同,结构辨识和参数估计这两个方面并不是截然分开的,而是可以交织在一起进行的一、控制对象本文采用了控制不同电机转速组合的方法,对四轴旋翼蝶形飞行器进行姿态控制,使四旋翼蝶形飞行器在不同姿态下飞行时具有较好的性能。
为了实现四轴旋翼蝶形飞行器的飞行控制,对飞行的控制系统进行了初步的设计,并给出了设计流程。
同时利用matlab对四轴旋翼蝶形飞行器控制系统进行仿真,仿真结果显示该控制系统能够满足四轴旋翼蝶形飞行器起飞、悬空及降落等控制姿态的要求。
二、控制原理本文提到的四轴旋翼飞行器、采用四组固定倾角旋翼,他们处于同一水平面内,且四点均匀分布。
如图一所示,该飞行器每一个旋翼单独由一台直流电机驱动其旋转,这四台电机被分成两组,其中CH1、CH3为一组,相应的电机顺时针旋转,CH2、CH4为一组,相应的电机逆时针旋转。
于是当飞行器平衡起飞时,空气动力扭转效应被抵消,从而可以抵消自转力矩,防止飞行器的自旋。
三、建模由动量矩定理得:1c d dL dLM M dt dt=-++ (1—1) 在外力矩作用下,星体角动量变化是上式的积分。
110()(0)(0)()t tc d L t L L L t M M =+-++⎰⎰ (1—2)而飞轮控制力矩由内控制力矩c T 和摩擦力矩f T 组成力矩方程为11c f dL T T dt =+ (1-3)飞轮作用的力矩c T ,f T 并不改变星体系统的总的角动量,仅重新分配了两者间的角动量。
四、MATLAB 仿真Step1:建立俯仰姿态角控制的系统图Step2:建立各个控制模块的传递函数。
1.角度转换放大模块:功能:将系统所需要实现的角度变化信号转化为放大的能实现电机驱动的电信号。
传递函数 ()s ϕ ()U s2.伺服电动机模块:功能:给电动机一个电压信号,通过电动机输出一个转矩驱动飞轮转动,表现为飞轮角度的变化。
传递函数模型:()m s Θ3 飞轮与星体动量交换模块角度信号转换放大器两相伺服 电机飞轮和星体 动量交换机构测速电机传感器期望 俯仰角输出 俯仰角1K(1)mm K s T s + U(S)功能:将电动机作用于飞轮上的力矩,使得飞轮的角动量发生变化,由于系统的总动量保持不变,这样,就能将飞轮的角动量传递到星体的角动量的变化,从而使得星体的俯仰角发生变化。
实现系统设计输入时的姿态角。
传递函数:不考虑卫星各个通道之间的相互耦合作用,飞轮控制动力学方程可以简化为22122m x x cx dx d d I J M M dt dtθϕ=-++ (2—1)这是一个非线性环节,要进行线性化,由于喷气或磁控系统的控制力相对于飞轮控制系统很小,而且由于空间干扰力矩的存在,在飞轮正常情况下,飞轮速度未达到速度饱和时,我们可以将第二控制力矩和空间干扰力矩看成近似抵消,不考虑系统设计过程中传递函数的增益符号,这样飞轮动量交换系统的传递函数可以简化为。
()m s Θ 1()s ϕ4 测速电动机和比例环节将卫星星体俯仰角输出角度信号反馈到伺服电动机输入信号上。
外加一个比例环节,可以进行反馈的强弱调节。
传递函数模型:()s θ()m U sgxJKI =t K s5 传感器模块功能:将控制器输出的角度信号测量出来和系统输入的期望角度信号作比较,形成误差信号,通过转换和放大驱动电动机带动飞轮转动,再通过动量交换装置使得卫星俯仰角实现预定规律。
传递函数1()s ϕ ()m s ϕStep3:俯仰角控制系统数学模型Step4:控制系统参数设置 伺服电动机参数电动机传递系数 220.1 1.1()0.1 1.110e s ss s s +Φ=++,在实验中取 10m K =电动机时间常数/()m m m w T J f C =+在试验中取,0.1m T =。
角度信号放大器的倍数一般在10到1000之间,在实验中取:1100K =测速发动机的传递函数系数取:1mK =K (1)mm s T s +1Kt K sgK1t K = 飞轮动量交换机构的传递系数:22//g x x x K J I mr M R ==近似的取:1100g K =所以控制系统的方框图可以化简为:控制系统的开环传递函数为:0210()0.1 1.1G s s s =+闭环传递函数为: 210()0.1 1.110s s s Φ=++系统的误差传递函数为:220.1 1.1()0.1 1.110e s ss s s +Φ=++ 五、验证使用simulink 控制系统仿真建立的方框图如下图;1011000.11s +100s1()R t ()C tn1=[10]; d1=[0.1 1.1 10]; s1=tf(n1,d1); step(s1)系统的超调量为: 1.131%100%13%1δ-=⨯= 系统的稳态误差2%调节时间为: 0.8s t s =系统的闭环传递函数为:21000()0.1(110)1000gg gK s S K S K Φ=+++程序:function thita=rels(z, na, nb, nc) %用增广矩阵法估计参数 .... % 函数说明体 ifisa(z,'iddata') % 输入输出数据y = pvget(z,'OutputData'); u = pvget(z,'InputData'); z = [y{1},u{1}]; end[nz,ns]=size(z);nn=na+nb+nc; % 数据维数与阶次thitak=ones(nn,1)*0.001; % 给定初始条件 thita=zeros(nn,nz);p1=eye(nn,nn)*(1.0e6); p2=zeros(nn,nn); K=zeros(nn,1); e=zeros(nz,1); I=eye(nn,nn); for i=na+1:nzQ=[[-z(i-1:-1:i-na, 1)]',[z(i-1:-1:i-nb, 2)]',[e(i-1:-1:i-nc, 1)]']; % 数据向量K=p1*Q'/(Q*p1*Q'+1); % 增益因子p2=(I-K*Q)*p1; % 协方差阵thita(:,i)=thitak+K*(z(i,1)-Q*thitak); % 参数估计值p1=p2;thitak=thita(:,i);e(i)=z(i,1)-Q*thitak; % 预报误差end主程序:theta=((50-26+5)/180*pi);a=(1+sin(theta))/(1-sin(theta));b=1/sqrt(a);f='1000/(w*(sqrt(w^2+121))*(sqrt(w^2+100)))-0.59'w=solve(f,'w');T=1./(sqrt(a).*w)s=zpk([-1/(a*T)],[0,-11,-10,-1/T],[1000*a])求得:a=3.45,T=0.61六、结论当a=3.45,T=0.61时,系统是稳定的。
七、参考文献[1] 谢新民, 丁锋. 自适应控制系统[M]. 北京: 清华大学出版社, 2002:68-75[2] 方崇智, 萧德云. 过程辨识[M]. 北京: 清华大学出版社, 1988:178-183[3] G.C.哥德温、R.L.潘恩著,张永光、袁震东译:《动态系统辨识》,科学出版社,北京,1983 [4] 徐小平,王峰,胡钢. 系统辨识研究的现状. 自动化技术. 1004 – 373X(2007)15 – 112 – 05.读书笔记“系统辨识”是研究如何利用系统试验或运行的、含有噪声的输入输出数据来建立被研究对象数学模型的一种理论和方法。
系统辨识是建模的一种方法,不同的学科领域,对应着不同的数学模型。
从某种意义上来说,不同学科的发展过程就是建立他的数学模型的过程。
辨识问题可以归结为用一个模型来表示客观系统(或将要构造的系统)本质特征的一种演算,并用这个模型把对客观系统的理解表示成有用的形式。
当然也可以有另外的描述,辨识有三个要素:数据,模型类和准则。
辨识就是按照一个准则在一组模型类中选择一个与数据拟合得最好的模型。
总而言之,辨识的实质就是从一组模型类中选择一个模型,按照某种准则,使之能最好地拟合所关心的实际过程的静态或动态特性。
通过系统辨识建立对象数学模型的依据是:研究表明,从外部对一个系统的认识,是通过其输入输出数据来实现的,既然数学模型是表述一个系统动态特性的一种描述方式,而系统的动态特性的表现必然蕴含在它变化的输入输出数据中。