循迹机器人控制系统设计
循迹机器人控制器的硬件设计与实现的开题报告

循迹机器人控制器的硬件设计与实现的开题报告一、选题背景与意义循迹机器人是现代机器人技术中的一项重要应用,可以被广泛用于自动导航、智能巡航、工业自动化等领域。
循迹机器人的基本结构为一个小车和配备在小车底部的感光传感器,通过感光传感器采集路面信息,小车控制器根据路面信息对小车的运动轨迹进行控制,以达到“自动驾驶”的目的。
循迹机器人控制器是循迹机器人的核心部件,通过控制器可对循迹机器人进行自动驾驶、巡航等操作。
因此,本文将研究循迹机器人控制器的硬件设计与实现,旨在提高循迹机器人的自动控制和智能化水平。
二、研究内容本文研究内容为循迹机器人控制器的硬件设计和实现。
主要包括以下几个方面:1. 循迹机器人的工作原理和系统结构研究2. 循迹机器人控制器的主要功能与指标研究3. 循迹机器人控制器电路设计4. 循迹机器人控制器PCB设计5. 循迹机器人控制器硬件测试和验证三、研究方法和技术路线本文研究方法主要为实验研究和理论分析相结合的方法。
具体步骤如下:1. 理论研究:阅读相关文献,了解循迹机器人系统结构和工作原理,分析循迹机器人控制器的主要功能和指标。
2. 硬件设计:根据循迹机器人控制器要求和功能需求,进行电路设计。
电路设计主要包括电源电路设计、感光传感器信号处理电路设计等。
3. PCB设计:根据电路设计,进行PCB设计和布线,制作出循迹机器人控制器的PCB板。
4. 硬件测试和验证:对循迹机器人控制器进行硬件测试和验证,验证循迹机器人控制器的功能和性能是否满足实际需求。
四、预期成果通过本文的研究,预计可以实现以下几点成果:1. 掌握循迹机器人控制器的工作原理和系统结构2. 实现循迹机器人控制器的硬件设计和实现3. 验证循迹机器人控制器的功能和性能,推广循迹机器人技术的应用五、进度安排本文的研究计划为一个学期,预计研究进度安排如下:1. 第一周:查阅相关文献,确定研究方向和内容2. 第二周至第四周:进行理论研究和方案设计,制定实验方案3. 第五周至第七周:进行电路设计和PCB设计4. 第八周至第九周:制作出循迹机器人控制器的PCB板5. 第十周至第十二周:进行循迹机器人控制器硬件测试和验证6. 第十三周至第十四周:整理实验数据和分析结果7. 第十五周至第十六周:编写开题报告六、参考文献1. 杨伟民,刘传明, 循迹机器人及其控制技术,电子技术与软件工程,2006年06期2. 潘强,刘怀苗, 基于AVR单片机的循迹小车控制算法研究,计算机应用,2011年S1期3. 王旭红,李亚平,孙云峰,基于ARM的循迹智能小车设计,电子技术应用,2014年02期。
自动循迹机器人(附有程序)
全国大学生电子设计竞赛自动循迹小车摘要摘要:本设计主要包括信号检测模块、主控模块、电机驱动模块。
信号检测模块采用LCD1314电感数字转换器,通过IIC总线与从机通信从而实现循迹和检测硬币。
主控电路采用MC9S12SX128单片机为控制芯片。
电机驱动模块采用L298N 专用电机驱动芯片。
信号检测模块将采集到的路况信号发送给MC9S12SX128单片机,经单片机处理过后对L298N 发出指令进行相应的调整。
单片机通过输出PWM波和对LDC1314采集的信息进行处理,来控制小车的速度及转向并实现自动循迹的功能。
关键词:智能小车,MC9S12SX128,L298N IIC总线ldc1314目录一、系统方案论证 (4)1.系统结构 (4)2.方案论证比较 (4)(1)微控制器模块 (4)(2)电机模块 (4)(3)电机驱动模块 (4)(4) 显示模块 (5)(5) 电源模块 (5)二、测控方法分析 (5)1.控制算法分析 (5)2.运动控制分析 (6)三、系统电路设计 (7)1.系统结构 (7)2.电路设计 (7)四、系统测试与分析 (8)1.测试方案 (8)2.测试条件与仪器 (8)3.测试结果 (8)(1)基本一测试 (8)(2)基本二测试 (8)(3) 基本三测试 (8)五、测试分析与结论 (9)参考文献 (9)附录1:部分源程序 (10)自动循迹小车(C题)【本科组】一、系统方案论证1.系统结构系统以MC9S12XS128单片机为主控器,以5110显示屏、L298N驱动模块、直流电机分别实现转速、时间、距离显示、驱动等功能。
使用C语言编写程序,通过速度编码器检测并读出车轮的转速,并通过触摸按键选择系统的转速模式,实现不同速度的调节。
2.方案论证比较(1)微控制器模块方案一:MC9S12XS128单片机飞思卡尔官方函数库应用简便,开发周期短,速度和功耗方面优势明显。
方案二:51单片机指令集简便,超低功耗,熟练使用开发周期长。
智能循迹机器人控制系统设计
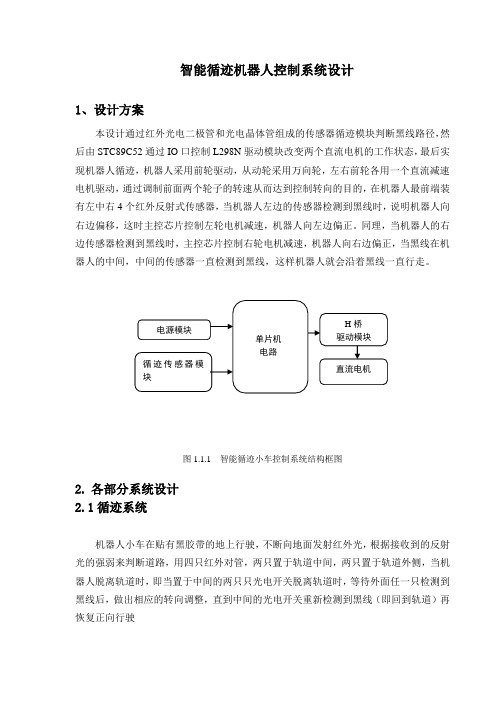
智能循迹机器人控制系统设计1、设计方案本设计通过红外光电二极管和光电晶体管组成的传感器循迹模块判断黑线路径,然后由STC89C52通过IO口控制L298N驱动模块改变两个直流电机的工作状态,最后实现机器人循迹,机器人采用前轮驱动,从动轮采用万向轮,左右前轮各用一个直流减速电机驱动,通过调制前面两个轮子的转速从而达到控制转向的目的,在机器人最前端装有左中右4个红外反射式传感器,当机器人左边的传感器检测到黑线时,说明机器人向右边偏移,这时主控芯片控制左轮电机减速,机器人向左边偏正。
同理,当机器人的右边传感器检测到黑线时,主控芯片控制右轮电机减速,机器人向右边偏正,当黑线在机器人的中间,中间的传感器一直检测到黑线,这样机器人就会沿着黑线一直行走。
图1.1.1 智能循迹小车控制系统结构框图2.各部分系统设计2.1循迹系统机器人小车在贴有黑胶带的地上行驶,不断向地面发射红外光,根据接收到的反射光的强弱来判断道路,用四只红外对管,两只置于轨道中间,两只置于轨道外侧,当机器人脱离轨道时,即当置于中间的两只只光电开关脱离轨道时,等待外面任一只检测到黑线后,做出相应的转向调整,直到中间的光电开关重新检测到黑线(即回到轨道)再恢复正向行驶2.2避障系统采用红外对管置于机器人小车正前方,可以检测到障碍物是否存在,以做出相应的判断。
2.3主控系统我们采用单片机作为整个智能机器人的核心,来对机器人进行自动控制。
单片机有着简单、方便、快捷、价格低廉、较为强大的控制功能以及可位寻址操作功能等优点,符合整体设计方案。
2.4驱动系统采用功率三极管作为电机驱动芯片。
电机驱动芯片驱动能力强、操作方便,稳定性好,性能优良。
功率三极管的使能端可以外接电平控制,也可以利用单片机进行软件控制,满足各种复杂电路的需要。
另外,驱动功率较大,能够根据输入电压的大小输出不同的电压和功率,解决了负载能力不够的问题。
采用L298N作为功率放大器的输出控制直流电机。
自动循迹机器人控制系统的设计

自动循迹机器人控制系统的设计作者:马家庆,于兆勤,刘建群,黄惠敬,陈炜楠来源:《教育教学论坛》2014年第20期摘要:循迹机器人是智能机器人领域内非常重要且被广泛研究的一种智能移动装置,国内许多重要的比赛都以循迹机器人为核心进行开展的。
本文设计的智能循迹避障机器人的控制系统主要由四个模块组成:最小系统模块、循迹模块、避障模块、电机驱动模块。
该机器人能在规定的场地上按指定路线行走,实现各种直走、转弯、调头、加速、减速、爬坡、探测障碍的能力。
关键词:机器人;循迹;单片机;传感器中图分类号:G642 文献标志码:A 文章编号:1674-9324(2014)20-0150-02一、绪言大学生创新能力的培养是高等教育创新教育、素质教育的本质要求,是建设创新型国家、构建国家创新体系的重要组成部分,是校园文化的更高层次,是促进科研体制改革和产学研结合的有效途径,必将直接推动生产力发展,产生直接的经济和社会效益。
[1]机器人竞赛作为一种高科技创新活动为大学生创新能力的培养提供了广阔的舞台。
智能机器人作为一种人的思维与机器融为一体的自动化设备正在为改善人们的生产、生活环境,促进人类社会文明的发展发挥着越来越重要的作用[2]。
人们已经研制了各式各样的具有感知、决策、行动和交互能力的特种机器人和各种智能机器人[3],如水下机器人、军用机器人、空中空间机器人、搬运机器人、娱乐机器人等。
可见,机器人技术的应用已经从制造业向非制造业领域发展,循迹机器人的研究也成为机器人研究领域不可或缺的一部分。
循迹机器人是一种能够自动按照给定的路线进行移动的机器人,它是一个运用传感器、信号处理、电机驱动及自动控制等技术来实现路面探测、障碍检测、信息反馈和自动行驶的技术综合体,对提高学生的创新能力、综合工程应用能力将起到积极的作用。
本文针对“中国机器人大赛中的机器人游中国项目”比赛,设计制作了智能循迹避障机器人。
该比赛场地采用与地面颜色有较大差别的线条作为引导线,场地上有桥、减速坡等各种障碍,并根据机器人到达景点的多少及其难度计算比赛成绩。
自循迹智能小车控制系统的设计与实现

自循迹智能小车控制系统的设计与实现自循迹智能小车控制系统的设计与实现1. 引言智能小车是一种可以自动导航及执行任务的设备,具有广泛的应用领域,如物流、仓储、医疗等。
自循迹智能小车可以通过感知环境并判断合适的路径,实现自主导航。
本文将详细介绍自循迹智能小车控制系统的设计与实现过程。
2. 控制系统的硬件设计2.1 控制芯片选型在设计自循迹智能小车控制系统之前,首先需要选取合适的控制芯片。
常用的选择包括Arduino、Raspberry Pi等。
本文选择使用Arduino控制芯片,理由如下:1) Arduino具有开源、易学易用的特点,适合初学者学习和使用。
2) Arduino具有丰富的扩展接口,可以方便地与其他硬件设备进行连接。
2.2 传感器选型传感器是自循迹智能小车控制系统的关键部分,常用的传感器包括光电传感器、红外传感器等。
本文选择使用红外传感器,理由如下:1) 红外传感器可以检测到地面上的黑线,用于实现自循迹功能。
2) 红外传感器价格相对较低,适合在自循迹智能小车中应用。
3. 控制系统的软件设计3.1 控制算法设计在自循迹智能小车中,控制算法是实现自主导航的关键。
常用的控制算法包括PID控制算法、模糊控制算法等。
本文选择使用PID控制算法,理由如下:1) PID控制算法简单易懂,容易实现。
2) PID控制算法可以根据当前误差来调整小车的行驶方向和速度,实现自动校正。
3.2 软件实现在控制系统的软件实现中,需要编程实现传感器数据的读取、算法的计算以及控制命令的输出。
本文使用Arduino开发环境进行编程,具体步骤如下:1) 编写传感器读取模块的代码,在指定频率下读取红外传感器数据。
2) 编写PID控制算法模块的代码,在读取到的传感器数据基础上进行计算,得到控制命令。
3) 编写控制命令输出模块的代码,将控制命令通过引导电路传输到小车电机控制模块。
4) 调试代码,通过串口监视器观察系统的运行情况,并根据需要进行调整。
自动寻迹机器人电控系统设计

自动寻迹机器人电控系统设计【摘要】自动避障寻迹机器人能够在复杂的路况下精确地完成指定工作。
介绍了所设计的基于摄像头智能识别路径的机器人的组成,完成了基于单片机的电控系统硬件的设计,采用C语言编写控制系统的软件。
该机器人的试验证明,应用该电控系统的机器人较好地完成了预期功能。
【关键词】电控系统;自动循迹;无线视频;C语言自动避障寻迹机器人主要由机械系统、电控系统及其软件、摄像系统、电源系统等组成。
该机器人采用摄像头采集数据,精确度高,采集快,很好实现了系统的功能要求。
1.电控系统硬件设计电控系统主要包括:电源电路,电机驱动电路,主控电路和遥控电路等。
电控系统硬件的设计采用飞思卡尔公司的S12XS128芯片。
该芯片有8路AD,2路串口通信和8路PWM。
运行时钟可以超频到64MHz,完全可以满足系统的需求。
电控系统中,S12芯片需要5V电压和200mA电流;舵机的供电电压为5V,电流为200mA;直流电机需要直接接电压7.2V,电流800mA的电源。
系统选用电压7.2V、功率1200mAh的锂电池供电;稳压芯片采用两片LM7805芯片提供5V电压,一路为舵机供电,另一路为其他模块供电,电源电路如图1所示。
图1 LM7805电路图所设计的无线传输电路由单片机,车载无线接收发器和电脑端无线收发器组成,采用RS232通讯协议传输数据。
无线传输收发器采用汇睿微通公司的XLTTL-USB串口转USB接口和XL02-232API模块组成。
电机驱动电路采用智能功率芯BTS7960芯片,该芯片是应用于电机驱动的电流半桥高集成芯片,它带有一个P沟道的高边MOSEFT,一个N沟道的底边MOSFET和一个驱动IC,工作电压5.5V-27.5V,最大驱动电流43A,工作频率25KHz,在本电路设计中,直流电机工作电压7.2V,电流1A,工作频率25KHz,2块BTS7969芯片组成一个全桥电路,控制电机的正反转。
驱动电路如图2所示。
自动循迹机器人控制系统的设计

文 章 编号 :1674—9324(2014)20—0150—02
一 、 绪 言 大学 生创 新 能力 的培 养是 高 等教育 创新 教 育 、素质 教 育 的本 质要求 ,是建 设创 新 型 国家 、构 建 国家创 新体 系 的重 要组成部分 ,是校园文化的更高层次 ,是促进科研体制改革 和产学研结合的有效途径 ,必将直接推动生产力发展 ,产生 直接 的经 济 和社会 效 益 。【lJ 机 器人 竞赛 作 为一 种高 科技 创新 活 动为 大学 生创 新 能 力 的培 养提 供 了广 阔 的舞 台 。智 能机 器人 作 为一 种人 的思 维与机器融为一体 的自动化设备正在为改善人们的生产 、
2014 年 5 月 第 20期
教 育 教 学 论 坛
EDUCAT10N TEACHING FORU卜1
May 2014 N0.20
自动循 迹机器 人控制 系统 的设 计
马家庆 ,于兆勤 ,刘建群 ,黄惠敬 ,陈炜楠
(广东 工业 大学 机 电工 程学 院 ,广东 广 州 510006)
+ - -+ -+ 一+ 一+ -+ -+ 一
音 乐学 习及 音乐 实 践 活 动 中非 常重 要 ,不 仅 可 以表 现 为学 习兴趣与激情 ,而且体现在学生音乐生活及内心世界的丰 富。态度因素也是学生学 习时的心理因素,可以表现为学
爱护 学生 ,时刻 为学 生树 立 良好 的教 师形 象 。其二 ,要敬 业 爱 岗 ,能运用 世 界观 、人 生 观和 审美 观积 极 改善 与调 整 自己 的心态 ,以尽快适应课程改革所带来 ,促进 人类 社会 文 明 的发展 发 挥着 越来 越 重要 的 作用[21。人们已经研制了各式各样的具有感知 、决策 、行动和 交互能力的特种机器人和各种智能机器人 t3],如水下机器 人 、军 用机 器人 、空 中空 间机器 人 、搬 运机 器人 、娱乐 机器 人 等 。可 见 ,机器 人 技术 的应 用 已经从 制造 业 向非 制造 业 领域 发展 ,循迹 机 器人 的研 究也 成 为机 器人 研究 领域 不 可 或缺 的一部分 。循迹机器人是一种能够 自动按照给定的路线进 行移 动 的机 器人 ,它 是一 个 运用 传 感 器 、信 号 处 理 、电机驱
机器人自动寻迹控制系统毕业设计说明书

南京理工大学毕业设计说明书(论文)作者: 陆建学号:0701500122学院(系):机械工程学院专业: 机械工程及其自动化题目: 机器人自动寻迹控制系统的设计指导者:张雯高级工程师(姓名)(专业技术职务)评阅者:樊黎霞教授(姓名)(专业技术职务)2011年 5 月南京理工大学毕业设计(论文)评语学生姓名:陆建班级、学号:0701500122 题目:机器人自动寻迹控制系统的设计综合成绩:毕业设计(论文)评语毕业设计说明书(论文)中文摘要毕业设计说明书(论文)外文摘要目次1 绪论 (1)1.1 机器人概述 (1)1.2 移动机器人研究现状 (2)1.3 移动机器人的关键技术 (4)1.4 移动机器人研究背景及其意义 (6)1.5 论文简介及论文所做的工作 (7)2 寻迹小车整体结构设计 (8)2.1 寻迹小车运动结构选型 (8)2.2 模块方案比较与论证 (9)2.3 最终方案 (13)3 硬件实现及单元电路设计 (15)3.1 车身设计 (15)3.2 AT89S52主控制芯片介绍 (16)3.3 单片机在机器人自动寻迹小车中的功能 (20)3.4 寻线系统设计 (20)3.5 电机驱动电路的设计 (22)3.6 稳压电路及稳压芯片简介 (28)4 软件实现 (29)4.1 程序设计总体思路 (29)4.2 传感器布置位置 (29)4.3 小车的几种状态 (29)4.4 传感器数据处理及寻迹流程图 (31)4.5 单片机实现寻迹的程序设计 (34)5 系统调试 (36)5.1 调试轨道介绍 (36)5.2 调试实际结果分析 (36)5.3 调试过程中遇到的问题及解决方案 (36)结论 (41)致谢 (43)参考文献 (44)附录A 机器人自动寻迹控制系统单片机C程序 (46)图1 机器人自动寻迹控制系统实物图 (51)图2 机器人自动寻迹控制系统面包板调试图 (52)图3 机器人自动寻迹控制系统原理图及PCB板设计图 (53)表1 所用零件列表 (55)1绪论现代科学技术的快速发展,特别是微电子技术和计算机技术的飞速发展,机械行业已经发生巨大的变化而且还将继续发生更为深刻的变化。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
循迹机器人控制系统设计
循迹机器人可用于自动导航、物流、清洁等多种场合,其控制系统设计是其操作的关键。
本文将介绍一种循迹机器人控制系统的设计。
一、硬件设计
1.电路板设计
循迹机器人需要安装多个传感器来检测运动方向,而且要通过电路板将传感器信息传输到控制单元。
因此,将电路板的布局设计在机器人的主控制中心,并且根据传感器位置安装,以保证数据传输的稳定性和准确性。
2.传感器
循迹机器人与地面之间会存在一些差异,如线路的颜色、亮度,因此无论使用什么样的传感器都需要调节灵敏度,以便捕捉到信号能力。
使用红外线传感器(Infrared Sensor)可以检测出
黑色线路与白色线路之间的差异,而应答传感器(Resistant Sensors)可以将机器人向左或向右侧的移动量控制在合适的
位置。
3.电池
由于循迹机器人需要大量的能量,所以Batteries应该被设计
成高容量和低消耗能量。
Lithium Polymer Battery即为一例,
具有较高的能量密度和低电压消耗。
因此,机器人可以保持长时间的运行而不会对电池造成的过度耗损。
二,软件设计
1.控制算法
循迹机器人的控制算法需要能够控制机器人上下左右的移动,并忽略极其不必要的信息(如噪音)。
其中,控制算法核心为PID(Proportional-Integral-Derivative)控制器。
该控制器使用传感器输入和设定值(循迹线)之间的误差来计算输出,输出将用于控制循迹机器人的制动,方向等。
PID控制器能够准确地调整输出,以使传感器的误差最终收敛到0。
2.编程语言
为了实现PID控制器,需要使用一种编程语言来编写循迹机器人的控制程序。
C语言被认为是循迹机器人控制系统中的最佳选择之一,因为它具有高效性、可靠性和能够实现嵌入式系统控制的强大功能。
三、总结
循迹机器人控制系统应包括硬件和软件的两个部分,其中硬件包括电路板、传感器和电池,软件包括控制算法和编程语言。
这些组件的设计和实现可以使循迹机器人能够自动寻找路径,并避免一些障碍物,从而实现其无人驾驶的目标。
数据是获取信息以进行决策和发现模式的关键途径。
在很多领域,包括商
业和科学等,数据分析已成为一项重要的工作。
在进行数据分析时,需要搜集和整理大量数据,并对其进行分析和解释。
本文将通过一个例子来说明如何收集相关数据并进行分析。
假设我们要研究一家咖啡店的业绩,需要搜集以下数据:
1.总销量
在一段时间内,统计咖啡店所有饮品的销售量。
2.顾客数量
在一段时间内,记录顾客到咖啡店的数量,以及他们的访问次数。
3.营业额
在一段时间内,统计咖啡店从销售中获得的总收入。
4.销售额分析
根据不同种类的饮品,分析每种饮品的销售额占比,以及其变化情况。
5.时段销售情况
在一天的不同时间段,统计咖啡店的饮品销售情况,以确定哪些时段的销售额较高。
6.促销效果
比较促销前后的销售额数据,以评估促销活动的效果。
收集以上数据后,我们可以进行以下分析:
1.总销量
通过总销量的数据,我们可以了解咖啡店的繁忙程度、流量和客户的口味。
2.顾客数量
通过顾客数量数据,我们可以了解咖啡店的客流量和客流量的变化程度。
随着时间的推移,我们还可以确定客户的购买趋势,以便进一步调整饮品的种类和价格。
3.营业额
营业额的变化反映出咖啡店的整体经济状况。
我们可以通过跨越较长时间周期(如一年)和短时间周期(如一周)来了解营销额的变化情况,以便查看咖啡店的销售情况。
4.销售额分析
通过分析不同种类的饮品销售占比,我们可以发现顾客的口味趋势并做出相应调整。
此外,我们还可以评估产品销售策略。
5.时段销售情况
根据不同时段的销售情况发现热销品种,以供定价参考。
我们还可以评估咖啡店的经营策略,并根据销售低谷时段的情况调整营销策略。
6.促销效果
通过对促销前后的销售额进行比对,我们可以评估促销活动的效果,并进一步优化促销政策和渠道。
总之,通过收集和分析以上数据,我们可以了解咖啡店的经营情况和市场需求。
这些数据将帮助我们优化经营策略和促进业绩的提高。
雀巢公司是全球著名的食品和饮料制造商。
该公司成立于1866年,总部位于瑞士,在全球拥有190个国家超过2000个品牌和产品系列。
该公司旗下的咖啡品牌Nespresso在
全球范围内取得了巨大的成功。
然而,随着Nespresso市场份额的增加,竞争也变得愈加激烈。
金字塔公司、illycaffè、Lavazza等品牌看到了商机,纷纷推出
类似的咖啡胶囊。
为了阻止竞争对手,雀巢公司需要在市场上继续推出创新和高品质的产品,并保持优越的营销策略。
为了更好地了解市场和竞争对手,雀巢公司进行了大量的数据收集和分析。
他们使用了各种方法来收集数据,包括市场调研、招致专业人员的帮助、评估品牌形象的量化数据分析等等。
通过分析这些数据,雀巢公司可以更好地了解市场趋势、顾客需
求和竞争对手,以进一步优化营销策略。
例如,雀巢公司收集的数据之一是用户的口味喜好。
该公司可以根据这些数据来生产不同口味的咖啡胶囊,以满足不同地区的用户需求。
并且,通过分析用户使用胶囊的习惯和频率,雀巢公司可以对销售策略和促销活动进行微调,从而增加产品的销售额和利润。
另一方面,雀巢还使用数据分析检查其与竞争对手的差异。
例如,他们会比较Nespresso和竞争品牌的定价、销售渠道和市
场份额等因素,以了解各自的市场占有情况。
并根据这些数据来制定相应的营销策略,以提高竞争力和产品的市场份额。
总之,雀巢公司通过数据收集和分析,能够更好地了解市场和竞争对手。
通过这些数据,他们可以更好地了解消费者需求,了解竞争对手的优势和劣势,从而定义出更好的营销策略。
正是如此,Nespresso能够在竞争激烈的市场上取得长久的成功。