无刷直流电机正弦波控制系统研究及实现
电动车正弦波控制技术

1、按照T计算可以消除霍尔安装误差以及沿延迟。 2、按照T1~T6计算可以消除速度突然变化时的角度计算误差。
43
180度控制模式的关键技术分析
整体系统控制结构
44
第四部分 180度正弦波矢量控制的实现
45
180度控制模式的实现
电流重构的实现要求
电流采样对MCU的要求
能定时采样 采样速度快
A Y Z
Fad S N
Faq Fa C X II
B Fr I
如图所示,电枢 磁动势的直轴分 量Fad对转子主磁 极产生最大去磁 作用
13
无刷直流电机的基本控制技术
无刷直流电机的电枢反应
A Y S Z
Fa C Faq
N
Fad X
B I
如图所示,电枢磁 动势的直轴分量Fad 对转子主磁极产生 最大增磁作用。
注:本电路采用内部运放作为瞬时电流保护和电流检测。 实际应用还应采用运放进行平均电流的采样保护
56
180度控制模式的实现
180度正弦波控制的特点分析
1、矢量控制 保证恒定转矩电流,消除电机的增磁和去磁反应。 2、两相PWM调制 降低开关损耗,提高系统效率。 3、相电流重构技术 适时监测相电流的大小,从而实现电流控制和保护。
Hall IC
霍尔元件功能方框图 霍尔元件磁电转换
18
无刷直流电机的基本控制技术
无刷直流电动机转子位置信号的检测-霍尔元件
1、三个霍尔元件在 空间依次相差120o电 角度 2、传感器磁极与转 子磁极同轴旋转、极 数相等、极性相对应
19
无刷直流电机的基本控制技术
霍尔元件的安装方式
20
无刷直流电机的基本控制技术
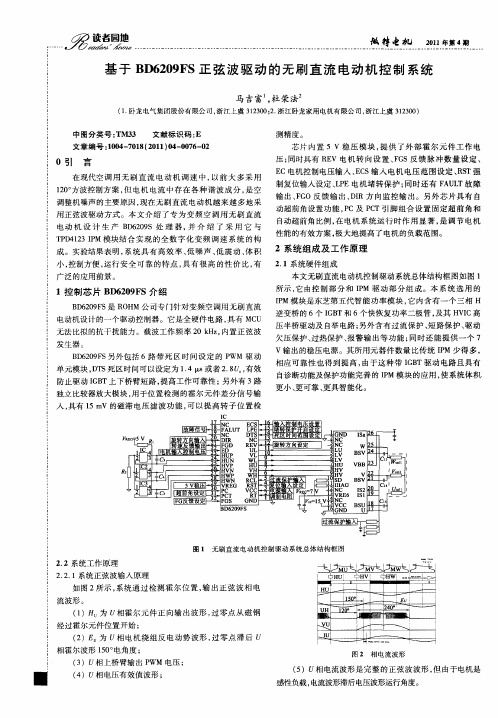
基于BD6209FS正弦波驱动的无刷直流电动机控制系统
无法 比拟 的抗干扰能力 。载波工作 频率 2 H , 0k z 内置正 弦波
发生 器 。
欠压保护 、 过热保 护、 报警输 出等 功能 ; 同时还 能提供一 个 7
V输 出的稳压 电源 。其所用元器件数 量 比传统 IM 少得多 , P 相应 可靠性也 得到提 高, 由于这种带 I B G T驱 动 电路且具 有
B 6 0 F 是 R H 公 司专 门针 对 变 频 空 调 用 无 刷 直 流 D29 S O M 电动 机 设 计 的 一 个 驱 动 控 制 器 。 它是 全 硬 件 电路 , 有 MC 具 U
逆变桥 的 6个 I B G T和 6个快恢复功率二极管 , 及其 H I V C高 压半桥驱动及 自举 电路 ; 另外含 有过流保护 、 短路保 护 、 动 驱
中 图 分类 号 : M3 T 3
文献 标 识 码 : E
测精 度 。
文章 编 号 :04 7 1 (0 1 o 一 o 6 O 1 0 — 08 2 1 )4 o 7 一 2
芯片 内置 5V稳 压模 块 , 供 了外部 霍尔 元件 工作 电 提
O引 言
在现代空 调用 无刷 直 流 电动 机调 速 中 , 以前 大 多采 用 10 方波控制方 案 , 电机 电流 中存 在各 种谐 波成 分 , 空 2。 但 是
B 60F D 2 9 S另外 包 括 6路 带 死 区 时 问 设 定 的 P WM 驱 动
单元 模块 ,T D S死 区时间可 以设定为 14I 或者 2 8 有效 . s x .U , 防止驱动 I B G T上下桥臂短路 , 提高工作可靠性 ; 另外有 3路
独立 比较 器 放 大 模 块 , 于 位 置 检 测 的 霍 尔 元 件 差 分 信 号 输 用
180度正弦
无刷直流风扇电机180度正弦波控制目前的变频风扇一般采用无刷直流电机,因其无励磁绕组、无换向器、无电刷、无滑环,结构比一般传统的交、直流电动机简单,运行可靠,维护简单。
与鼠笼型感应电动机相比,其结构的简单程度和运行的可靠性大体相当,但由于没有励磁铁耗和铜耗,功率在300W以下时,其效率比同规格的交流电机高 10%~20%。
无刷直流电机一般采用方波驱动,采用霍尔传感器采样转子位置,以此为基准信号控制绕组强制换相。
这种方案控制方法简单,成本低,在目前电动车方案中应用广泛。
但由于方波驱动换相时会出现电流突变,导致转矩脉动较大,转动不平稳,噪声指标较差,难以在家电应用领域推广。
而正弦驱动可以避免换相时的电流突变,虽然最大转矩会降低,但在噪声指标上有明显的优势。
通常电机变频控制都采用DSP数字信号处理(Digital Signal Processing,简称DSP)实现,还需要提供传感器精确检测转子位置,可实现高精度控制,但DSP方案开发成本和应用成本都很高,家电应用对价格非常敏感,传统的DSP电机矢量控制方案比较难推广。
由于某些家电应用对动态响应等性能要求不高,如风扇,可以用稍微降低性能但大幅度降低成本的方案来代替DSP方案。
本文提出了8位单片机的正弦波驱动方案来满足这种需求。
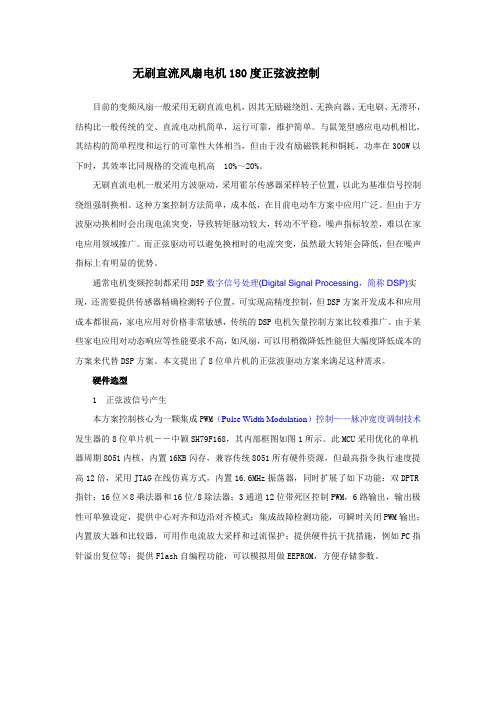
硬件选型1 正弦波信号产生本方案控制核心为一颗集成PWM(Pulse Width Modulation)控制——脉冲宽度调制技术发生器的8位单片机――中颖SH79F168,其内部框图如图1所示。
此MCU采用优化的单机器周期8051内核,内置16KB闪存,兼容传统8051所有硬件资源,但最高指令执行速度提高12倍,采用JTAG在线仿真方式,内置16.6MHz振荡器,同时扩展了如下功能:双DPTR 指针;16位×8乘法器和16位/8除法器;3通道12位带死区控制PWM,6路输出,输出极性可单独设定,提供中心对齐和边沿对齐模式;集成故障检测功能,可瞬时关闭PWM输出;内置放大器和比较器,可用作电流放大采样和过流保护;提供硬件抗干扰措施,例如PC指针溢出复位等;提供Flash自编程功能,可以模拟用做EEPROM,方便存储参数。
无刷直流电机正弦波控制及其在电动自行车中的应用

7 4・
《 测控技 术} 2 0 1 3 年第 3 2卷第 7 期
无刷 直流电机正弦波控制 及其在 电动 自行车中的应 用
王会明 , 丁 学 明
( 上海理工大学 光 电信息 与计 算机工程学院 , 上海 流 电机 一般 都 采 用方波控 制 , 算 法 简单 、 易 于控 制 , 但 缺 点是 转矩脉 动较 大、 噪 声 高。
S i n e W a v e Br us h l e s s DC Mo t o r Co n t r o l a nd I t s App l i c a t i o n
I n El e c t r i c Bi c y c l e
W ANG Hu i — mi n g , DI NG Xu e - mi n g
( S c h o o l o f O p t i c a l — E l e c t r i c l a a n d C o mp u t e r E n g i n e e r i n g , U n i v e r s i t y o f S h a n g h a i f o r S c i e n c e a n d T e c h n o l o g y , S h a n g h a i 2 0 0 0 9 2 , C h i n a )
在分析常规三相 S P WM的基础上 , 提 出采用一种开关损耗最小的两相 S P WM控制算法 , 并设计 了基 于 微控制器 I x P D 7 9 F 9 2 1 1的 电动 自行 车控 制 系统 。 以 I x P D 7 9 F 9 2 1 1为运 动 控 制 芯 片 , 借 助 三相 霍 尔信 号 来确 定无刷 直 流 电机 的 转子位 置 , 通 过 转速 闭环控 制 、 电流 限流控 制 和 开 关损 耗 最 小的 两相 S P WM 控 制算 法 , 实现 了一种 简单 而 高效 的 电动 自行 车 正 弦波控 制方 案 。 实践证 明 , 相 比 目前 在 电动 自行 车控制 领域采用的方波控制方案, 该方案转矩脉动减少, 启动和运行噪声更低。实验结果表明上述控制 系统方 案可行 , 具有 良好的性价 比。 目 前, 该 系统 已经实现并成功应用于电动 自 行车 系统中。 关键 词 : 微控制器; 电动 自行 车 ; 无刷 直流 电机 ; 正 弦波脉 宽调 制 中图分类 号 : T M3 3 文献标 识 码 : A 文章编 号 : 1 0 0 0—8 8 2 9 ( 2 0 1 3 ) 0 7—0 0 7 4— 0 5
无刷直流风扇电机180°正弦波控制

无刷直流风扇电机180°正弦波控制(8.53 KB)28 秒前图4 二极三相绕组暗示图由电机基础理论可知:T=K*Fa*Ff*sinθ。
式中K为常数,Ff为定子合成磁动势,Fa为转子磁动势,θ为定子磁动势和转子磁动势的夹角,明显θ=90°时转矩最大。
方波控制以六步运行,θ在60° 120°之间变幻,因此不是恒定转矩,正弦波控制的目的就是控制定子磁链方向,尽量保持定子磁链方向和转子磁链方向垂直。
(这也就是DSP矢量控制追求的目标——定子磁链定向控制)。
这样转矩最大且恒定,没有转矩脉动。
要想获得上述效果,需要知道转子精确位置,采纳光电编码盘定位准但成本高,家电应用中负载确定,电机转速不会突变,因此本计划采纳目前无刷电机标配的来检测转子位置。
60°电角度内认为转子速度恒定,转子位置采纳软件模拟定位。
转子旋转360°电角度,霍尔传感器有六种输出,在程序中作出一个360°正弦波的表,每隔60°分段,通过读取3路霍尔的当前值,软件取不同的段,取出的数据送入PWM发生器的占空比寄存器,就可以复现一个完整的360°正弦波,取表间隔时光以上一霍尔周期实际测试时光为参考动态调节。
超前换相角处理上述计划实现的是抱负状态下的电压驱动波形,只是保证电压矢量是和转子磁势方向基本垂直,事实上因为电机是感性负载,电机定子电流矢量滞后于定子电压矢量,因此定子磁势也滞后于定子电压矢量,也就是说,假如根据上述SPWM波形驱动电机,定子磁势和转子磁势夹角将小于90°,电机转矩不是最大,定子电流存在直轴重量,产生去磁效应,导致控制器的功率因素不高,因此需要加入超前换相处理。
以便定子磁势和转子磁势夹角尽量临近90°。
软件实现很容易,只要在做正弦表时,将初始角度超前就可以,无须更改软件结构。
第1页共2页。
高效率BLDC无刷直流电机控制原理、控制设计计算方法及步骤(图文并茂详解)

高效率BLDC无刷直流电机控制原理、控制设计计算方法及步骤(图文并茂详解)一、空载时间插入与补充:1、大多数BLDC电机不需要互补的PWM、空载时间插入或空载时间补偿。
2、可能会要求这些特性的BLDC应用仅为高性能BLDC伺服电动机、正弦波激励式BLDC电机、无刷AC、或PC同步电机。
3、控制算法许多不同的控制算法都被用以提供对于BLDC电机的控制。
4、典型做法是,将功率晶体管用作线性稳压器来控制电机电压。
当驱动高功率电机时,这种方法并不实用。
5、高功率电机必须采用PWM控制,并要求一个微控制器来提供起动和控制功能。
二、BLDC无刷直流电机控制原理:1、无刷电机属于自换流型(自我方向转换),因此控制起来更加复杂。
2、BLDC电机控制要求了解电机进行整流转向的转子位置和机制。
3、对于闭环速度控制,有两个附加要求,即对于转子速度或电机电流以及PWM信号进行测量,以控制电机速度以及功率。
4、BLDC电机可以根据应用要求采用边排列或中心排列PWM信号。
5、大多数应用仅要求速度变化操作,将采用6个独立的边排列PWM信号。
这就提供了最高的分辨率。
6、如果应用要求服务器定位、能耗制动或动力倒转,推荐使用补充的中心排列PWM信号。
7、为了感应转子位置,BLDC电机采用XXX效应传感器来提供绝对定位感应。
这就导致了更多线的使用和更高的成本。
无传感器BLDC控制省去了对于传感器的需要,而是采用电机的反电动势(电动势)来预测转子位置。
8、无传感器控制对于像风扇和水泵这样的低成本变速应用至关重要。
9、在采用BLDC电机时,冰箱和空调压缩机也需要无传感器控制。
三、BLDC高效率无刷直流电机控制算法方法及步骤:1、提供的三项功能:⑴、用于控制电机速度的PWM电压;⑵、用于对电机进整流换向的机制;⑶、利用反电动势或传感器来预测转子位置的方法;2、脉冲宽度调制仅用于将可变电压应用到电机绕组。
有效电压与PWM占空比成正比。
3、当得到适当的整流换向时,BLDC的扭矩速度特性与以下直流电机相同。
bldc正弦波控制
bldc正弦波控制摘要:一、前言二、BLDC 正弦波控制介绍1.BLDC 的定义2.正弦波控制的优势三、BLDC 正弦波控制原理1.电机结构2.正弦波控制策略3.控制器的功能四、BLDC 正弦波控制应用领域1.工业自动化2.电动汽车3.家电产品五、BLDC 正弦波控制的发展趋势1.高效率2.低噪音3.智能化六、结论正文:一、前言无刷直流电机(BLDC)正弦波控制是一种高效、节能、噪音低的电机控制策略。
随着工业自动化、电动汽车以及家电产品等领域的迅速发展,BLDC 正弦波控制技术在这些领域得到了广泛应用。
本文将详细介绍BLDC 正弦波控制的原理、应用及发展趋势。
二、BLDC 正弦波控制介绍1.BLDC 的定义无刷直流电机(BLDC)是一种采用电子换向技术替代传统碳刷换向的直流电机。
它具有较高的运行效率、较长的使用寿命和较低的噪音。
2.正弦波控制的优势BLDC 正弦波控制可以实现对电机的高效、精确控制,提高电机性能。
与传统方波控制相比,正弦波控制具有更优越的性能,如较低的电磁噪音、更平稳的转矩输出等。
三、BLDC 正弦波控制原理1.电机结构BLDC 电机主要由定子、转子、电子换向器和控制器等部分组成。
其中,电子换向器负责为转子提供三相交流电源,控制器负责控制电子换向器的换向,从而实现对电机的控制。
2.正弦波控制策略BLDC 正弦波控制策略主要是通过调整电子换向器的换向时间,使电机运行在正弦波形电流状态,从而实现对电机的高效、精确控制。
3.控制器的功能控制器负责计算正弦波形电流的脉冲宽度调制(PWM)信号,并根据电机的实际运行状态调整PWM 信号的占空比,从而实现对电机的速度、转矩等参数的精确控制。
四、BLDC 正弦波控制应用领域1.工业自动化BLDC 正弦波控制在工业自动化领域得到了广泛应用,如机器人、输送带、压缩机等。
它能够提高设备的运行效率、降低维护成本,并满足高精度控制的需求。
2.电动汽车BLDC 正弦波控制在电动汽车领域也有着广泛的应用,如电动助力转向、空调压缩机、油泵等。
用dsPIC30F3010实现无刷直流电动机正弦波驱动
15 3 8
计算机与数字工程
C o mp u t e r& Di g i t a l En g i n e e r i n g
总第 2 8 7期 2 0 1 3 年 第 9期
用 d s P I C 3 0 F 3 0 1 0实 现 无 刷 直 流 电 动 机 正 弦 波 驱 动
ห้องสมุดไป่ตู้
中 图分 类 号
S i n u s o i d a l Co n t r o l o f BLDC Ba s e d o n d s P I C3 0 F3 0 1 0
M匣 NG S h a n LANG Ba o h u a
( S c h o o l o f El e c t r o n i c I n f o r ma t i o n Eng i n e e r i n g,Xi ’ a n Te c h n o l o g i c a l Un i v e r s i t y,Xi ’ a n 7 1 0 0 21 )
好 的调 速 功 能 , 又具 备 换 向 的特 点 。 无 刷 直 流 电 机 按 照 驱
实际磁通去逼近基准磁 通 , 由此决 定逆变 器 中电子器件 的 开关状态 , 进而产生 P WM 波 。同 S P WM 比较 S VP WM 具 有使 电机 转 矩 脉 动 小 、 噪声低、 直 流 电 压 利 用 率 高 的优 势_ 】 。而且 S VP WM 更适合于数字化控制系统 , 所 以本文 采用 S VP WM 实现无刷直 流电机 的正 弦波驱动 。 本文使用空间矢量 脉宽调 制[ 7 J ( S p a c e Ve c t o r Mo d u l a — t i o n , S VM) 方法来驱动 B L D C, 此调制方法的实现要 由以下 几个模块 组成 : 基于 d s P I C 3 0 F 3 0 1 0外 围硬件 电路 的设计 , 驱动 电路 及 逆 变 电路 的设 计 , 依 照 软件 框 图 在 MP L AB I D E v 8 . 9开发环境下 , 采 用 C语 言 与汇编语 言编写 系统 的 主程序与 中断子程序_ 1 ] 。
bldc正弦波控制
bldc正弦波控制
BLDC (Brushless DC) 正弦波控制是一种用于驱动无刷直流电机的控制方法。
正弦波控制通过产生一个类似正弦波的电流来控制电机的转速和位置。
BLDC电机由三个相互差120度的线圈组成,这些线圈也被称为相。
每个相都需要正弦波形式的电流来驱动。
为了产生这些正弦波形的电流,需要使用一种称为电调器的电子设备。
BLDC正弦波控制的流程如下:
1. 传感器检测:使用位置传感器(通常是霍尔效应传感器)来检测转子的位置。
2. 位置检测:根据传感器的反馈信息确定转子的位置。
3. 电调器信号生成:根据转子的位置信息,控制电调器生成相应的正弦波形电流。
4. 电流控制:将正弦波形电流送入每个线圈以控制电机。
5. 转速和位置控制:通过改变正弦波形电流的振幅和频率,以控制电机的转速和位置。
BLDC正弦波控制的优点是可以提供平稳的转速和位置控制,减少功耗和噪声,并且增加电机的效率。
与传统的方波控制相比,BLDC正弦波控制可以减少谐波产生,提供更好的运动平滑性和精准性。
家用风扇无刷直流电机控制方案
基于中颖SH79F168的家用风扇无刷直流电机180°正弦波控制摘要:无刷直流电动机采用方波驱动,由于换相时不可避免会产生转矩脉动,导致噪声较大,难以在家电应用领域推广,为减小换相噪声,一般采用正弦波控制.但正弦驱动控制电路和软件算法复杂,成本较高.本文提出了一种简易正弦波驱动方法,采用三相120度方波霍尔传感器作为同步信号,集成PWM发生器的MCU来控制三相全控桥,实现直流无刷电机的180°正弦波被动变频方案.实验证明这是一种性价比较高的正弦驱动方法,同时内部集成自动霍尔相序识别功能,可以解决三相霍尔和电机相线装配时的对应问题.关键词: 正弦驱动无刷电机控制自动霍尔相序识别一、 概述无刷直流电机因无励磁绕组,无换向器、无电刷、无滑环,使其结构比一般传统的交、直流电动机来得简单,运行较为可靠,维护较为简单。
与鼠笼型感应电动机相比较,其结构的简单程度和运行的可靠性大体相当。
由于没有励磁铁耗和铜耗,功率在300W以下时,其效率比同规格的用电流励磁的电机高10%~20%;和感应电动机相比,效率更高。
无刷直流电机一般采用方波驱动,采用霍尔传感器获得转子位置,通过此信号强制换相.这种方案控制方法简单,成本低,在目前电动车方案中应用广泛.但由于方波驱动换相时会出现电流突变,导致转矩脉动较大,因此噪声指标差,难以在家电应用领域推广.而正弦驱动可以避免换相时的电流突变,虽然最大转矩会降低,但在噪声指标上有明显的优势.通常永磁同步电机的控制都采用DSP,并且电机需要提供光电编码盘来精确检测转子位置,可以实现高精度控制,甚至可用在伺服系统中,但成本会很高,家电应用对价格非常敏感,而且有些应用对性能要求不高,比如电风扇,传统的DSP矢量控制正弦驱动高成本方案也比较难推广.因此本文提出的采用8位单片机集成PWM发生器的正弦驱动方案有较高的市场价值.一般正弦驱动直流无刷电机的气隙磁场是正弦波(也称为永磁同步电机)或是正弦波注入高次谐波后的磁场波形,定子多采用分布绕组,因此反电动势也是正弦波。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
最后,设计了系统实验平台。其中硬件主要由主控芯片 STM32F030、电源 模块、MOS 驱动模块、电流采样模块、过流保护模块、刹车模块组成;软件程 序利用汇编语言编写,设计实现了主体结构程序、初始化程序、三角函数运算程 序、SVPWM 运算程序、相电流重构程序、PI 调节程序。最后软硬件调试成功, 通过对实验数据的记录和分析,证明了本文设计方案的可行性、实用性和先进性。 关键词:正弦波,无刷直流电机,SVPWM,电流重构,转子位置角估算,电源 电路,三角函数
The sinusoidal waveform control system of brushless DC motor which was based on space vector pulse width modulation (SVPWM) has been studied. Firstly, the basic structure of the brushless DC motor was introduced. On this basis, the generating mechanism of rotating magnetic field and the motor operating principle were analyzed deeply. Considering of the air gap magnetic field distribution and the motor mathematical model in the three-phase coordinate system, the mathematical model of the motor in the d-q coordinate system was deduced, which demonstrated the feasibility of controlling brushless DC motor through decoupling.
I
万方数据
无刷直流电机正弦波控制系统研究及实现
Abstract
As a typical representative of mechatronical process, the brushless DC motor has received extensive attention due to its advantages, such as small size, light weight, high efficiency, low inertia and wide speed range. In addition, its corresponding mechanical characteristics is similar to the DC motor. Therefore, its traces can be found in the most areas which are from the aviation to exploration of the sea. The traditional 120 ° square-wave operation mode exists low defects, for example, torque ripple, large operating noise, energy efficiency and so on. Therefore, the research to find out an excellent strategy in the motor control system is more imperative.
其次,比较了正弦波脉宽调制技术与空间电压矢量脉宽调制技术;着重论述 了空间电压矢量脉宽调制原理与算法,并以此为基础,设计了基于 id 0 运行方 式的正弦波控制系统仿真模型,仿真结果证明了正弦波控制无刷直流电机的可行 性。
再次,本文针对在设计正弦波控制系统的过程中所遇到的几个关键性问题 (如电流重构技术、转子转速及空间位置估算、电机启动方式)进行了全面的阐 述;针对低调制区电流重构容易失败的问题,提出了 PWM 移相技术。
保 密 □,在 年解密后适用本授权书。 本学位论文属于 不保密 □。
学位论文作者签名: 年 月日
指导教师签名: 年 月日
万方数据
万方数据
江苏大学硕士学位论文
摘要
作为机电一体化进程中的典型代表,无刷直流电机以体积小、重量轻、效率 高、惯量小、调速范围宽的优点而受到广泛关注。除此之外它所对应的机械特性 也与直流电机类似,因此,上至航空,下至探海的各大领域都能发现它的踪迹。 而传统 120°方波运行方式在电机使用中存在转矩脉动大,运行噪音大,能源利 用率低等缺点。所以,研究性能更加优良的控制系统势在必行。
指导教师
贾洪平 副教授
作者姓名
张鹏
申请学位级别 工程硕士 学科(专业) 电气工程
论文提交日期 2016 年 4 月 论文答辩日期 2016 年 6 月
学位授予单位和日期 江苏大学
2016 年 6 月
答辩委员会主席 评阅人
万方数据
无刷直流电机正弦波控制系统研究及实现
独创性声明
本人郑重声明:所呈交的学位论文,是本人在导师的指导下,独 立进行研究工作所取得的成果。除文中已注明引用的内容以外,本论 文不包含任何其他个人或集体已经发表或撰写过的作品成果。对本文 的研究做出重要贡献的个人和集体,均已在文中以明确方式标明。本 人完全意识到本声明的法律结果由本人承担。
III 万方数据
无刷....................................................................................................................I Abstract ......................................................................................................................... II 目 录 .........................................................................................................................IV 第一章 绪 论 ............................................................................................................. 1
Next, sinusoidal pulse width modulation technique and space vector pulse width modulation technique were compared each other. The principle and algorithm of space vector pulse width modulation were discussed, which provided theoretical sources and design ideas to building the Simulation Module or writing software program. The sinusoidal waveform control system simulation mode based on operation mode was designed. The feasibility of controlling brushless DC motors by sinusoidal waveform was proved through the simulation waveforms.
分类号: UDC:
TM351 621.3
密级: 公开 编号: 10299Z1307035
专业硕士学位论文
无刷直流电机正弦波控制系统研究及实现 Research and Implementation of Sinusoidal-wave Control
System for Brushless DC Motor
II
万方数据
江苏大学硕士学位论文
Finally, the experimental platform was designed. The hardware consisted of a master chip—STM32F030, power module, MOS driving module, current sampling module, overcurrent protection module, brake module. The software programs were written by assembly language, which were designed to finish the main structure of the program, the initialization procedure, trigonometric operation procedures, SVPWM operation program, phase current reconstruction program, PI adjustment program. Finally, hardware and software were debugged successfully. According to the recording and analysis of experimental data, the plan which was devised in this paper was feasible, practical and advanced. Key words: sinusoidal waveform, brushless DC motor, SVPWM, current refactoring, rotor position and angle estimation, power circuit, trigonometric function