论点的复合运动中动点、动系的选择原则和方法
点的复合运动

点的合成运动
y’
o’
x’
例2、直升飞机在匀速前进的军舰上降落
y
y’
o’
x’
x
o
点的合成运动
y’ x’
o’
物体的运动的描述结果与所选定的参考系有关。同一物体的运动,在不同的 参考系中看来,可以具有极为不同的运动学特征(具有不同的轨迹、速度、 加速度等)。
相对运动:未知
3、
va ve vr
大小 v1 v2
?
方向 √ √
?
vr va2 ve2 2vave cos60 3.6 m s
arcsin(ve sin 60o ) 46o12
点的合成运动
vr
求解合成运动的速度问题的一般步骤为(P180):
① 选取动点,动系和静系。
B
曲柄-滑块机构
点的合成运动
思考题 动 点:杆上A点。 动系:固连于滑块B。 定系:固连于墙面。 绝对运动? 相对运动? 牵连运动?
点的合成运动
A Bv
点的合成运动
动 点? 动参考系? 绝对运动? 相对运动? 牵连运动?
练习题1
点的合成运动
点的合成运动
点的合成运动
动 点? 动参考系? 绝对运动? 相对运动? 牵连运动?
定系的速度。
点的合成运动
基本概 念
牵连点的概念
(1)、定 义 动参考系给动点直接影响的是该动系上与动点相重合的一点,
这点称为瞬时重合点或动点的牵连点。 (2)、进一步说明
牵连运动一方面是动系的绝对运动,另一方面对动点来说起 着“牵连”作用。但是带动动点运动的只是动系上在所考察的瞬 时与动点相重合的那一点,该点称为瞬时重合点或牵连点。 (3)、注 意
理论力学课件 14.3 动点、动系的选择

点的速度合成定理3、动点、动系的选择
动点、动系的选择
绝对运动:直线运动相对运动:圆周运动
牵连运动:定轴转动
动点:轮上和杆接触点动系:杆
绝对运动:圆周运动相对运动:曲线运动牵连运动:平移
选择持续接触点为动点
动点:轮心
动系:杆
绝对运动:圆周运动相对运动:圆周运动
牵连运动:平移
平底凸轮机构
绝对运动:直线运动相对运动:曲线运动
牵连运动:定轴转动
动点:轮上与板接触点动系:板
绝对运动:圆周运动相对运动:曲线运动牵连运动:平移
动点:轮心
动系:板
绝对运动:圆周运动相对运动:直线运动牵连运动:平移
动点:盘心
动系:杆
绝对运动:圆周运动相对运动:直线运动
牵连运动:定轴转动
动点:O点
动系:杆
绝对运动:直线运动相对运动:直线运动牵连运动:定轴转动动点、动系选择
点的速度合成定理。
理论力学4复合运动

va v e v r
原则:
@ 动点动系在不同刚体上;
@ 保证有尽量多的已知量。
选法一:动点:套筒上A点 动系:摇杆O1B
动点、动系选好后,三种运动都清晰, 特别是相对运动轨迹。
12
选法一:动点:套筒上A点 动系:摇杆O1B 运动分析 绝对运动: 圆周运动
相对运动: 直线运动
在某瞬时,动系所在刚体上与动点重合的点。 牵连点具有瞬时性特点。
ve
•牵连(加)速度:
动点:M 动系:凸轮
动点:M 动系:带滑槽摇杆
ve
牵连点相对静系的(加)速度
10
观察动点M的牵连点M’
动系刚体可以进行延拓!
例:已知OA在图示瞬时水 平,其角速度为w0,O1B与 铅垂向夹角300。求 O1B杆的 角速度。
用几个简单的运动合成一个复杂的运动
?
3
点的复合运动
目的:
合成运动
不同坐标系描述同一点运动时,各运动之间关系; 利用运动关系求解刚体系的运动学问题。
内容:
点的合成运动概念; 点的速度合成定理;
点的加速度合成定理;
点的合成运动概念
z
x'
z'
o'
M
一点 二系 三 运动
动点:P
研究运动的点为动点 O x y z 为静参考系 O’x’y’z’为动参考系
30
r xi yj zk r ' x ' i ' y ' j ' z ' k ' ro ' xo ' i yo ' j zo ' k
关于《动点和动系的选择原则》
B/ y
y
A B G
aen
a0
G
v0
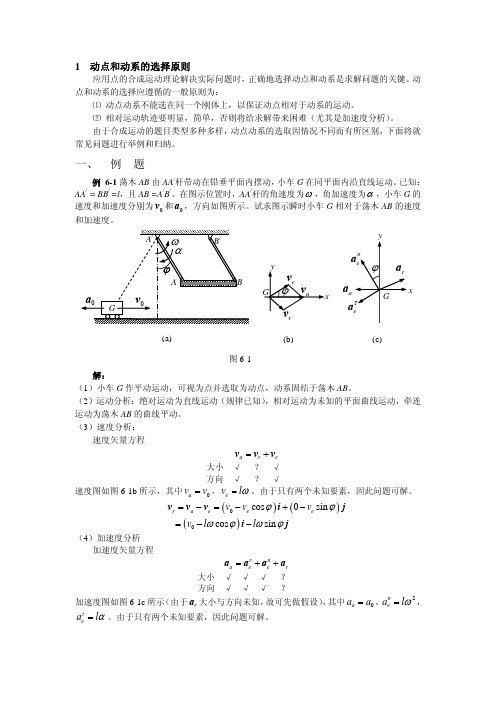
(a) 图 6-1
ve
G
ar
x
va
x
aa
ae
(c)
vr
(b)
解: (1)小车 G 作平动运动,可视为点并选取为动点,动系固结于荡木 AB。 (2)运动分析:绝对运动为直线运动(规律已知) ,相对运动为未知的平面曲线运动,牵连 运动为荡木 AB 的曲线平动。 (3)速度分析: 速度矢量方程
[注意] 本例的合成问题类型可归纳成:运动的物体上有一动点作相对运动。动点和动 系的选择原则是:动点取有相对运动的点,动系固结于运动物体。 本例中动点的相对运动规律及动系牵连运动规律已知, 欲求动点的绝对运动, 属于运动 的合成问题。 当牵连运动为转动时,应注意科氏加速度的存在及计算,并能熟练判定其方向。为了求 得科氏加速度 aC ,必须先进行速度分析,求出动系的牵连角速度 ωe 及动点的相对速度 v r 。 写出加速度矢量方程后,可用投影式进行定量计算。 例 6-3 图 6-3 所示机构中,曲柄 OA 绕 O 轴以角速度 匀速转动,通过滑块带动摇杆 O1B 绕 O1 轴摆动,已知曲柄长和两轴间的距离 OA=OO1=r,O1B=2r。试求当 60 时 B 点的速度和加速度。
(4)加速度分析 加速度矢量方程
n a a a e ae a r
大小 方向
√ √ √ √
√ √
? ?
n 2
加速度图如图 6-1c 所示 (由于 ar 大小与方向未知, 故可先做假设) , 其中 aa a0 ,ae l ,
ae l 。由于只有两个未知要素,因此问题可解。
点的合成运动

点的合成运动
在此之前,我们研究点的运动时,都是相对于某 一个参考系(定系)而言。但在有些问题中,往往需 要同时在两个不同的参考系中来描述同一点的运动, 而其中一个参考系相对于另一参考系也在运动。
为此,引入动点,动系,定系。并研究同一动点 相对 于两个不同参考系的运动之间的关系。
2013年8月6日
计算有何影响?
2013年8月6日
理论力学CAI
20
选择方法一
动系
动点
2013年8月6日
理论力学CAI
21
选择方法二
动系
动点
2013年8月6日
理论力学CAI
22
动点、动系和定系的选择原则
1. 动点是个确定的点。
2. 动点与动系必须分别选在两个不同的物体上,动点
与动系间有相对运动。
3. 动点相对动系的相对运动轨迹易于直观判断。
例题
已知:AB匀角速度转动。 求:M在导槽EF及BC中运动的速度与加速度。
E
B
C M
A
l F D
2013年8月6日
理论力学CAI
35
y
vB
B
ve
M
E
vM
C
速度分析:
x 动点—M点 动系—BC杆
A
vr
D
l
F
ve = vB = l
v M = ve v r
y : vM = ve sin = l sin x : 0 = vr ve cos
相对轨迹,相对速度vr,相对加速度ar。
2013年8月6日 理论力学CAI
7
牵连运动(entangled motion) :
第五讲 点的复合运动

vr (t )
ve (t )
P Pe
动点P的绝 对轨迹
Pe’
t 时刻牵连点
Pe的绝对轨迹
v&e
=
lim
∆t→0
ve
(t
&#e (t + ∆t ) − vet (t + ∆t ) + vet (t + ∆t ) - ve (t )
∆t→0
∆t
= ω×vr + ae
e1 x
rOA
j y0
动系的角速度、角加速度
ω, ε
e&i = ω × ei , i = 1, 2,3
绝对速度v动a =点rP&O相P 对定系aaO=x0r&y&O0Pz0 的速度
相对速度:动点P相对动系Axyz的速度
~
vr
=
d rAP dt
相对动系的 时间导数
ar
=
d~2rAP dt 2
预备知识:动矢量相对定系、动系的时间导数
B
O
aA aen
C
aen
=
ω
2 BD
⋅ 2l
aeτ = ε BD ⋅ 2l
哥氏加 速度
aC
= 2ωBD × vr
ac = 2ωBDvr
ωBD
将复合公式向ac方向投影得:
D
aA cos 600 = aτe cos 300 − aen cos 600 + aC
εBD = − 3ω0 /12
解毕!
复合运动分析要点: 1.分析运动传递的因果关系; 2.选择动点和 动系要使动点的相对运动存在,且相对运动轨迹简单或直观,这 样才能起到运动分解和达到简化运动分析的目的。
《理论力学》第七章-点的复合运动
v0
Ra
n r
aa
a
φ
x'
O
n
arn
vr2 R
v2
Rsin2
3、速度分析
va vevr
vr
ve
sin
v
sin
4、加速度分析
aaaear arn
n
aasinaecosarn
aa
acot
v2
Rsin3
48
§7–4 牵连运动为转动的加速度合成定理
牵连运动为平动时加速度合成定理:aaaear
牵连运动为定轴平动时 aaaear是否成立?
37
§7–2 速度合成定理
va vr
应用速度合成定理
va vevr
3、速度分析。 绝对速度va: va=OA·ω=rω , 方向垂直于OA向上
牵连速度ve: ve为所要求的未知量,
方向垂直于O1B 相对速度vr: 大小未知, 方向沿摇杆O1B
38
§7–2 速度合成定理
va vr
其中 O1A l2 r2
1
第七章 点的复合运动
§7–1 复合运动的概念 §7–2 速度合成定理 §7–3 牵连运动为平动时点的加速度合成定理 §7–4 牵连运动为转动时点的加速度合成定理
2
第七章 点的复合运动
复合运动问题:研究物体相对于不同参考系 的运动之间的关系。
复合运动不是一种新的运动形式,只是
一种研究运动学问题的思路和方法。
40
§7–3 牵连运动为平动的加速度合成定理
一、绝对运动和相对运动之间的关系
z M
绝对运动方程:r r(t)
z
r (t)
r (t ) k O j
上海交通大学-理论力学PPT-第六章-刚体的基本运动和点的复合运动

减速箱由四个齿轮构 如图所示。齿轮Ⅱ和 成,如图所示。齿轮 和Ⅲ
Ⅱ Ⅰ
Ⅲ
Ⅳ
安装在同一轴上, 安装在同一轴上,与轴一起 转动。各齿轮的齿数分别为 转动。 z1=36 , z2=112 , z3=32 和 z4=128 ,如主动轴 的转速 如主动轴Ⅰ的转速 n1=1 450 r﹒min-1,试求从 动轮Ⅳ的转速 动轮 的转速n4。 的转速
将两式相乘, 将两式相乘,得
因为n 到齿轮Ⅳ的传动比为 因为 2= n3,于是从动轮 到齿轮 的传动比为 ,于是从动轮Ⅰ到齿轮 n z z i14 = 1 = 2 4 = 12.4 n4 z1z3 由图可见,从动轮 和主动轮 的转向相同。 和主动轮Ⅰ的转向相同 由图可见,从动轮Ⅳ和主动轮 的转向相同。 最后,求得从动轮 的转速为 最后,求得从动轮Ⅳ的转速为
2012年4月17日 10 理论力学CAI
荡木用两条等长的钢索
O1 φ l A O
(+)
O2 l M B
平行吊起, 如图所示。 钢索 平行吊起 , 如图所示 。 长为长l, 度单位为m。 长为长 , 度单位为 。 当荡 木摆动时钢索的摆动规律 π 为 ϕ = ϕ0 sin t 其中 t 为 , 4 时间, 单位为s; 转角φ 时间 , 单位为 ; 转角 0 的单 位为rad,试求当 和 位为 ,试求当t=0和t=2 s时, 时 荡木的中点M的速度和加速度。 荡木的中点 的速度和加速度。 的速度和加速度
理论力学CAI
9
结论: 结论 刚体平移的特点: 刚体平移的特点 平移刚体在任一瞬时各点的运动轨迹形状,速度 加速度都一 平移刚体在任一瞬时各点的运动轨迹形状 速度,加速度都一 速度 样。 平移刚体的运动可以简化为一个点的运动。 即:平移刚体的运动可以简化为一个点的运动。 平移刚体的运动可以简化为一个点的运动
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
论点的复合运动中动点、动系的选择原则和方法
1引言
理论力学是机械、土木类专业的专业基础课。
包括静力学、运动学和动力学三大部分。
运动学是从几何角度研究物体运动轨迹、运动方程、速度和加速度,而不考虑引起物体运动的物理原因。
其中点的合成运动是运动学的重点内容。
此部分内容题目多样,解题方法灵活,并且具有趣味性,完成一道题目时很有成就感。
当然也是让学生感到没有思路、无从下手的部分,普遍反映难度较大,也是测验、考核过程中丢分比较多的部分,问题的关键是无法正确的选取动点和动系。
本文从典型例题出发,介绍了点的合成运动中动点和动系的选取原则,可以帮助学生理清思路,提高点的合成运动的解题能力。
2点的合成运动概述
在日常生活中,会经常遇到这样的情况。
当我们站在不同的参考物上,观察同一个物体的运动,发现物体所呈现的运动形式是不一样的。
举个最常见的例子,如图1。
人站在一辆沿直线匀速行驶的公共汽车上,以地面为参考物,观察人的运动,人在作匀速直线运动。
而以公共汽车为参考物,则人静止的。
可见,人的运动形式依选取的参考物不同而不同。
再引申一个例子,如图2。
沿直线轨道滚动的车轮,研究其轮缘上任意一点M的运动。
对于地面来说,点M的轨迹是旋轮线,而对于车厢来说,点M的轨迹则是一个圆。
车轮上的点M是沿旋轮线运动,是一种比较复杂复杂的运动形式,但是以车厢作为参考体,则点M相对于车厢的运动是简单的定轴转动,车厢相对于地面的运动是简单的平移。
轮缘上一点M的运动就可以看成为两个简单运动的合成,即点M相对于车厢作圆周运动,同时车厢相对地面作平移。
于是得到了合成运动的定义,即相对于某一参考体的运动可由相对于其他参考体的几个运动组合而成,称这种运动为合成运动。
3一点二系三运动
研究点的合成运动,确定一个动点,选择定参考系和动参考系两个坐标系,分析动点的绝对运动、相对运动和牵连运动是首要任务。
3.1两个参考坐标系
研究点的合成运动,总要涉及两个参考坐标系。
(1)定参考系
建立在固定参考物上的坐标系,简称定系。
一般将定系固结在地面上,以oxyz坐标系表示。
(2)动参考系
建立在相对于定系(地面)运动着的物体上的坐标系,简称动系。
以o′×y 坐标系表示。
3.2一个研究对象一动点
动点,顾名思义,是作运动的点,但是要明确相对于定系和动系均有运动的点,才能选为动点。
3.3三种运动
(1)动点的绝对运动
动点相对于定参考系的运动成为动点的绝对运动。
动点在绝对运动中的速度,称为绝对速度,用va来表示,动点在绝对运动中的加速度称为绝对加速度,用aa
来表示
(2)动点的相对运动
动点相对于动参考系的运动称为动点的相对运动。
动点的相对速度是指动点在相对运动中的速度,用vr来表示。
动点的相对加速度为动点在绝对运动中的加速度,用ar来表示。
(3)牵连运动
确定牵连运动是研究点的合成运动的关键环节。
牵连运动是动系相对于定系的运动。
在这里要特别注意的是动系作为一个整体运动着,因此牵连运动具有刚体运动的特点,如平动或定轴转动。
确定牵连运动的前提是找到牵连点。
任意瞬时,动系与动点重合的点即为此瞬时动点的牵连点。
因此,牵连点是指动系上的点,动点运动到动系上哪一点,该点就是动点的牵连点。
某瞬时牵连点的速度称为动点的牵连速度。
用ve表示,某瞬时牵连点的加速度称为动点的牵连加速度,用ae表示。
4典型例题分析
理解一点二系三运动定义之后,重点是应用到具体的例题上。
下面举两个典型例子说明具体选取的过程。
如图3为凸轮顶杆机构,明白这种机构中主要有两个运动的构件,一个是顶杆AB,在作平行移动,一个是凸轮O,在作定轴转动。
在此类机构中,一般是要计算顶杆AB的速度和加速度。
顶杆在作平行移动,根据平动的特点,上面各点的速度和加速度都是相同的。
所以选择与凸轮接触的点A为动点,动点选定之后,定系一般固结在地面上,以后不用特别说明,关键是选择正确的动系。
首
先明确动系一定要建立在相对于地面运动着的物体上。
在此机构中,顶杆AB和凸轮O均在运动,究竟动系建在哪个构件Lr2这里要注意到选取动点动系一个非常重要的原则,就是动点和动系不能在同一个物体上。
既然动点为AB上的A 点,显然动系只能建在凸轮上。
分析动点A的三种运动,不难得出以下结论,A 点的绝对运动是沿AB的直线运动,相对运动是曲线(凸轮的轮廓线)运动,而牵连运动是绕O点的定轴转动。
图4依然为凸轮顶杆机构,其运动的传递形式与图3完全相同。
那么是否可以仍然选择顶杆和凸轮的接触点为动点,动系建立在凸轮上?相信会有很多同学会做出这样的选择。
但是,只要稍加推敲,就会发现问题所在。
我们选择的动点,一定是一个确定的点。
而在图4所示的凸轮顶杆机构中,凸轮与顶杆的接触点会随着机构的运动不断的变化,显然选择接触点是不合适的。
在这种情况下,我们要做出另外的选择。
此时,通常选择凸轮的轮心C为动点,动系则建在顶杆上。
分析一下三种运动,轮心C的绝对运动是绕O点的圆周运动,C 点的相对运动是与顶杆的平底相距为半径R的直线运动,因为在机构运动的任意瞬时,C点到平底的距离永远是半径R。
牵连运动则是顶杆的平行移动。
三种运动分析出来以后,不管是要求顶杆的速度还是加速度,后续的问题就迎刃而解了。
5结论
通过以上的分析,可以看出正确的选择动点、动系对于求解点的合成运动的重要性。
在问题面前,首先明确要求解的那一点(或对求解最有帮助的一点),选这一点为动点。
动坐标系要建立在相对于地面运动的物体上,且动点和动系不能在同一个物体上。
最后,动点相对于动系的运动轨迹要已知,也是一个非常重
要的原则。
总之,具体问题具体分析,万变不离其宗,掌握选择原则,多加练习,就能够找到正确的解题方法。