基于神经网络的模糊PID控制器设计与实现
基于模糊RBF神经网络的PID控制方法及应用
基于模糊RBF神经网络的PID控制方法及应用潘玉成;林鹤之;陈小利;吕仙银【摘要】针对常规PID控制参数固定难于满足时变不确定非线性系统的控制要求,利用模糊控制的良好收敛性和对模糊量的运算优势,以及神经网络自学习、自适应的特性,将常规PID控制与模糊控制、神经网络结合起来,提出一种基于模糊RBF神经网络的PID控制方法,实现了对PID参数的实时在线整定.将算法运用到柴油发电机调速系统的PID参数寻优中,MAT-LAB仿真试验结果表明,模糊RBF神经网络的PID控制具有更好的动静态特性和抗干扰性能,提高了对非线性时变被控对象的控制效果.【期刊名称】《机械制造与自动化》【年(卷),期】2019(048)003【总页数】5页(P215-219)【关键词】模糊RBF神经网络;PID控制;参数整定;MATLAB仿真【作者】潘玉成;林鹤之;陈小利;吕仙银【作者单位】宁德职业技术学院机电工程系,福建福安355000;福建省闽东卫生学校,福建福安355017;宁德职业技术学院信息技术与工程系,福建福安355000;宁德职业技术学院机电工程系,福建福安355000【正文语种】中文【中图分类】TP1830 引言PID控制(比例、积分和微分控制)是工业过程控制中应用较为广泛的控制策略之一,具有算法简单、容易实现及可靠性高等特点,适用于可建立精确数学模型的确定性系统,而实际工业生产中的控制系统大都存在严重的时变性、滞后性、非线性和现场干扰等,难于建立精确的数学模型,采用常规PID控制已无法满足系统的控制要求。
针对常规PID控制由于参数不能在线自整定,对非线性时变对象无法取得好的控制效果,目前已有学者将智能控制技术应用于常规PID控制[1-6]。
模糊控制无需建立被控对象精确的数学模型,以模糊集合理论为基础,凭借专家知识、人工经验制定规则,利用模糊逻辑推理方法,实现对被控对象的智能控制,具有良好的鲁棒性和适应性,但确定其模糊规则和隶属度函数依赖于经验,缺乏自学习能力。
基于神经网络再建模的模糊PID控制器精简化研究

相似性分析[6]、奇异值分解[7]等),分层递阶模糊系统结构 [8],自组织理论[9],并规则结构方式[10]等方法来解决。
NB NM NS ZE PS PM PB NB PB PB PM PM PS ZO ZO NM PB PB PM PM PS ZO NS NS PM PM PM PS ZO NS NS e ZO PM PS PS ZO NS NM NM PS PS PS ZO NS NS NM NM PM ZO ZO NS NM NM NM NB PB ZO NS NS NM NM NB NB
(5)
∑ µEl (e) ⋅ µECl (ec)
l =1
49
∑ ∆Kil ⋅ µEl (e) ⋅ µECl (ec)
∆Ki = fi (e, ec) = l=1 49
(6
(ec)
l =1
49
∑ ∆K
l d
⋅
µEl
(e) ⋅ µECl
(ec)
∆Kd = fd (e, ec) = l=1 49
本文以迄今广泛应用的模糊 PID 控制器为研究对象,以 简化其计算复杂性、减小计算延时为目标,考虑到利用 VHDL 的并行运算模式(因为单片机、DSP 芯片和计算机软 件实现都是串行运算模式)和已经调试成功的模糊 PID 控制 的优点,以及神经网络的并行运算模式。为此,我们选择神 经网络来简化它的计算复杂性,即利用神经网络万能函数逼 近能力,通过遍历模糊 PID 的输入输出数据对,训练一个神 经网络模型,来等效模糊 PID 控制器。试图用这种方式来减 小模糊 PID 数学模型的计算复杂性,促进该算法在 VHDL、 FPGA、SOPC 等并行硬件实现方式上的应用。
模糊神经网络PID设计方法及其优缺点
实验名称一.实验目的1.了解掌握传统PID控制原理及其基本的参数整定方法;2.了解掌握模糊控制原理及其优缺点;3.了解掌握神经网络原理及其优缺点;4.掌握将传统PID控制与模糊控制结合、传统PID控制与神经网络控制结合以及将传统PID控制、模糊控制与神经网络控制三者结合起来有效地解决控制问题。
二.实验内容1.分别改变PID参数中的Kp,Ti,Td,比较PID参数对控制系统的影响;2.选取Ziegler-Nichols法则对传统PID经行参数整定;3.选取合适的隶属度函数设计模糊控制PID;4.选取一种合适方式,设计神经网络与模糊控制结合的PID控制器。
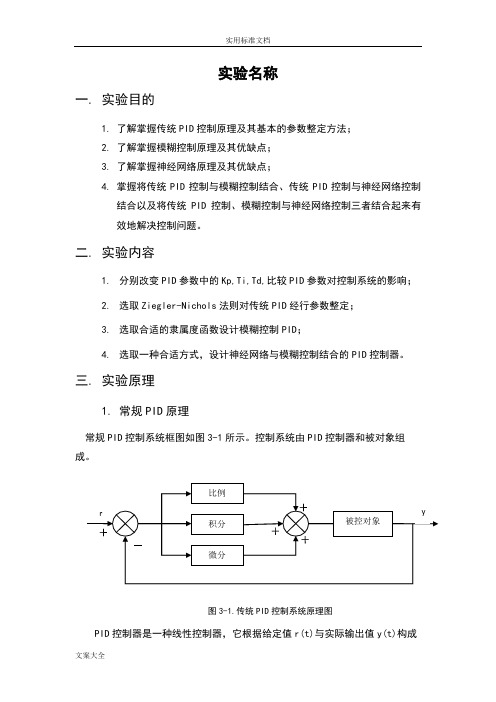
三.实验原理1.常规PID原理常规PID控制系统框图如图3-1所示。
控制系统由PID控制器和被对象组成。
图3-1.传统PID控制系统原理图PID控制器是一种线性控制器,它根据给定值r(t)与实际输出值y(t)构成控制偏差e(t)=r(t)一y(t)将偏差的比例(P)、积分(I)和微分(D)通过线性组合构成控制量,对被控对象进行控制,其控制规律为u (t )=K P (e (t )+1T I ∫e (t )dtt0+T D de(t)dt)或写成传递函数形式:G (s )=U(s)E(s)=K p (1+1T is +T d s)式中:Kp ——比例系数;Ti ——积分时间常数;Td 微分时间常数;2.Ziegler-Nichols 法则整定PID基于临界增益Kcr 和临界周期Pcr 的2. Ziegler-Nichols 整定法则3.模糊PID 控制器设计原理模糊控制是以模糊集合论、模糊语言变量及模糊逻辑推理为基础的计算机智能控制。
模糊控制的基本原理框图如图3-2所示。
它的核心部分为模糊控制器,模糊控制器的控制规律由计算机的程序实现。
实现一步模糊控制算法的过程描述如下:微机经终端采样获取被控制量的精确值,然后将此量与给定值比较得到偏差信号E ,一般选偏差信号E 作为模糊控制器的一个输入量。
模糊PID控制原理与设计步骤

模糊PID控制原理与设计步骤1.模糊化输入:将输入量通过模糊化过程,将其转化为隶属度函数形式,用来描述输入数量的各个级别或水平。
2.模糊化输出:同样地,将输出量也通过模糊化过程,转化为隶属度函数形式。
3.模糊化规则库:根据经验和专家知识,建立一组模糊规则,用来描述输入与输出之间的关系。
4.基于规则库的推理:根据输入的隶属度函数和规则库,通过隶属度的逻辑运算进行推理,得到输出的隶属度函数。
5.解模糊化:将输出的隶属度函数转化为具体的输出量,可以采用常用的解模糊化方法,如最大隶属度法、面积法等。
1.系统建模:首先需要对被控对象进行建模,得到其输入-输出关系。
可以基于部分局部建模或物理建模进行分析和确定。
2.设计模糊控制器的输入和输出:根据系统的特性和要求,确定模糊控制器的输入和输出。
- 输入通常包括误差(error)和误差的变化率(change in error)等。
-输出通常为控制量,可为模糊量或一阶量。
3.确定输入和输出的隶属度函数:确定输入和输出的隶属度函数形式,并根据实际情况进行参数调整。
通常可以选择三角形、梯形或高斯型函数等。
4. 设计模糊规则库:根据经验和专家知识,建立模糊规则库。
规则库的设计需要包括合理的覆盖边界和均匀的分布。
可以使用专家系统、模糊C-Means聚类等方法进行规则库的构建。
5.制定模糊推理机制:确定模糊推理的方法,常用的有最小最大法、剪切平均法等。
根据输入的隶属度函数和规则库,进行隶属度的逻辑运算和推理,得到输出的隶属度函数。
6.解模糊化:根据规则库,将模糊输出转化为具体的控制量。
可以采用最大隶属度法、面积法等方法进行解模糊化。
7.验证和调整:将设计好的模糊PID控制器应用到实际系统中,进行运行和调整。
根据实际反馈信号,对模糊规则库进行优化和调整,以提高控制系统的性能和稳定性。
总结:模糊PID控制是一种基于模糊逻辑和PID控制相结合的控制方法,能够更好地应对非线性、时变和模糊的控制系统。
基于BP_神经网络的PID_控制算法参数优化
- 22 -高 新 技 术从本质上来看,PID 控制算法就是对比例、积分和比例微分间的关系进行控制的一种算法。
PID 控制调节器具有适应性强、鲁棒性良好的特征,因此被广泛应用于工业控制领域。
但是,随着科学技术、控制理论发展,在工业生产中被控对象逐渐向复杂化和抽象化的趋势发展,并呈现滞后性、时变性和非线性的特征,这使传统PID 控制器难以精准调控这种较复杂的控制系统。
为了解决该问题,研究人员将控制理论与其他先进的算法相结合,形成全新的控制理论,包括神经网络控制、遗传算法以及模糊控制等。
对神经网络算法来说,由于其具有较高的鲁棒性和容错性,因此适用于复杂的非线性控制系统中,并且具有广阔的应用前景和较大的发展潜力。
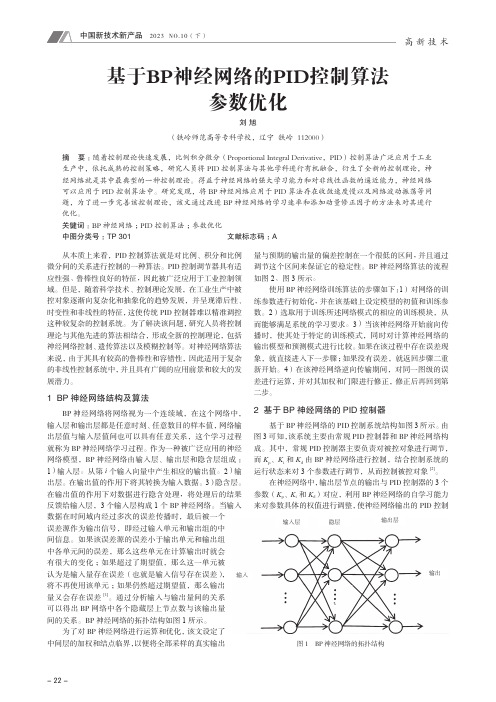
1 BP 神经网络结构及算法BP 神经网络将网络视为一个连续域,在这个网络中,输入层和输出层都是任意时刻、任意数目的样本值,网络输出层值与输入层值间也可以具有任意关系,这个学习过程就称为BP 神经网络学习过程。
作为一种被广泛应用的神经网络模型,BP 神经网络由输入层、输出层和隐含层组成:1) 输入层。
从第i 个输入向量中产生相应的输出值。
2) 输出层。
在输出值的作用下将其转换为输入数据。
3) 隐含层。
在输出值的作用下对数据进行隐含处理,将处理后的结果反馈给输入层,3个输入层构成1个BP 神经网络。
当输入数据在时间域内经过多次的误差传播时,最后被一个误差源作为输出信号,即经过输入单元和输出组的中间信息。
如果该误差源的误差小于输出单元和输出组中各单元间的误差,那么这些单元在计算输出时就会有很大的变化;如果超过了期望值,那么这一单元被认为是输入量存在误差(也就是输入信号存在误差),将不再使用该单元;如果仍然超过期望值,那么输出量又会存在误差[1]。
通过分析输入与输出量间的关系可以得出BP 网络中各个隐藏层上节点数与该输出量间的关系。
BP 神经网络的拓扑结构如图1所示。
为了对BP 神经网络进行运算和优化,该文设定了中间层的加权和结点临界,以便将全部采样的真实输出量与预期的输出量的偏差控制在一个很低的区间,并且通过调节这个区间来保证它的稳定性。
基于神经网络PID控制器的设计

基于神经网络的PID控制器设计摘要本文以提高控制器的控制效果为目标,将神经网络与PID控制相结合,分别对单变量系统和多变量系统的神经网络结构的PID控制进行了深入研究和探索。
对单变量系统,将预测控制的思想和神经网络PID控制的思想结合起来,用多步预测性能指标函数去训练神经网络把纬d器的权值,就构成了多步预测性能指标函数下的神经网络PID控制系统:本文对此系统进行了改进,引入了新的多步预测性能指标函数,同时对神经网络辨识器部分,采用了更适合于实时控制的动态递归神经网络来代替原方案中的多层前向网络对其辨识。
仿真结果表明此改进方法比原方法及带辨识器的神经网络PID控制方法具有更好的响应性能。
对多变量系统,首先研究了基于多步预测性能指标函数下多变量系统的神经网络PID控制,并给出仿真实例及结论;接着研究了PID神经元网络多变量控制器的结构和计算方法:它是由并列的多个子网络组成,当控制系统有n个被控变量,子网络就有n个。
每个子网络的输入层接受系统的给定信号和对象的输出信号;隐含层由比例元、积分元、微分元组成,实现PID运算;输出层实现规律的综合:为加快权值调整速度对输出层权值采用最小二乘法进行调整,代替原方案中的梯度法,仿真结果表明此系统具有良好的自学习和自适应解祸性能。
关键词: 神经元网络 PID控制多步预测性能指标函数动态递归神经网络单变量系统多变量系统The PID Controller Was Based On Neural NetworkDesignABSTRACTIn order to enhance the performance of the controller, this paper combined the neural network and PID control, and deeply studied the neural network Pm controller based on single-variable and mufti-variable system.For single-variable system, the neural network PID controller based mufti-step predictive performance target function combined the predictive control idea and the neural network PID control idea. It uses multi-step predictive performance target function to train the weights of neural network PID controller, This paper improved the system: It uses new mufti-step predictive performance target function to train the weights, and it uses the dynamic recursion neural network instead of multiplayer feed forward neural network that is furthermore fit for real-time control to identify the part of neural network identification. The simulating results shows that this method has better response performance than the neural network PID control method with identificationFor mufti-variable systems, at first, This paper studied the neural networks PID controller based mufti-variable systems using mufti-step predictive performance target function, After studying the system's simulating instances, I got the results; Then this paper studied the structure and arithmetic of the PID neural network multivariable controller. It is made up of paratactic mufti-sub-network, if there are n controlled variables in controlling system, the sub-networks then will have n too. The input layer of each sub-network accepted the present signal of the system and the output signal of controlled object; The hidden layer that is made up of proportion, integral and differential three parts realizes PID operation; The output layer realizes the integration of the rules; and its output layer's weights were adjusted using the least mean squares in stead of grads arithmetic in order to quicken the regulative speed of the weights, the results show that the system has much higher performance of self-studying and self-adapting.Keywords: Neural network PID Control Multi-step predictive performance target function Dynamic recursion neural network Single-variable system Multivariable system目录第一章引言 (1)1.1 课题背景及研究意义 (1)1.2 课题当今的研究现状 (1)1.3 本文的结构组成 (2)第二章 PID控制器的基本原理 (3)2.1 PID控制器 (3)2.1.1 PID原理 (3)2.1.2 PID各参数的作用 (4)2.2 数字PID控制 (4)2.2.1 控制器的组成 (5)2.2.2 典型的PID控制器 (5)2.3 PID参数整定 (5)2.4 小结 (6)第三章神经网络的基本原理 (6)3.1 神经网络的模型结构 (7)3.2 几种典型的学习规则 (8)3.2.1 无监督的Hebb学习规则 (9)3.2.2 有监督的Delta学习规则 (9)3.3 几种典型的神经网络 (9)3.3.1 BP神经网络 (9)3.3.2 RBF 神经网络 (12)3.3.3 CMAC 神经网络 (14)3.4 小结 (16)第四章神经网络PID控制基本原理以及应用 (16)4.1 基于BP神经网络的PID控制 (17)4.1.1 BP神经网络整定原理 (17)4.1.2 MATLAB的背景和发展 (21)4.1.3 MATLAB的工作环境 (22)4.1.4 常规PID控制系统 (23)4.1.5 基于BP神经网络的PID控制系统 (24)4.2 RBF神经网络和CMAC神经网络PID控制 (30)4.2.1 RBF神经网络PID控制 (30)4.2.2 CMAC神经网络PID控制 (31)4.3小结 (31)第五章绪论 (32)参考文献 (33)致谢 (34)第一章引言1.1 课题背景及研究意义目前工业自动化水平已经成为了各行各业现代化水平的一个重要标志,而自动化的核心理论是控制理论。
基于RBF神经网络整定的PID控制器设计及仿真_毕业设计(论文)

华北电力大学毕业设计(论文)题目基于RBF神经网络整定的PID控制器设计及仿真基于RBF神经网络整定的PID控制器设计及仿真摘要目前,因为PID控制具有简单的控制结构,可通过调节比例积分和微分取得基本满意的控制性能,在实际应用中又较易于整定,所以广泛应用于过程控制和运动控制中,尤其在可建立精确模型的确定性控制系统中应用比较多。
然而随着现代工业过程的日益复杂,对控制要求的逐步增高(如稳定性、准确性、快速性等),经典控制理论面临着严重的挑战。
对工业控制领域中非线性系统,采用传统PID 控制不能获得满意的控制效果。
采用基于梯度下降算法优化RBF神经网络,它将神经网络和PID控制技术融为一体,既具有常规PID控制器结构简单、物理意义明确的优点,同时又具有神经网络自学习、自适应的功能。
因此,本文通过对RBF神经网络的结构和计算方法的学习,设计一个基于RBF神经网络整定的PID控制器,构建其模型,进而编写M语言程序。
运用MATLAB软件对所设计的RBF神经网络整定的PID控制算法进行仿真研究。
然后再进一步通过仿真实验数据,研究本控制系统的稳定性,鲁棒性,抗干扰能力等。
关键词:PID;RBF神经网络;参数整定SETTING OF THE PID CONTROLLER BASED ON RBF NEURAL NETWORK DESIGN AND SIMULATIONAbstractAt present, because the PID control has a simple control structure, through adjusting the proportional integral and differential gain basic satisfactory control performance, and is relatively easy to setting in practical application, so widely used in process control and motion control, especially in the accurate model can be built more deterministic control system application. With the increasingly complex of the modern industrial process, however, increased step by step to control requirements (e.g., stability, accuracy and quickness, etc.), classical control theory is faced with severe challenges. Non-linear systems in industrial control field, using the traditional PID control can not obtain satisfactory control effect. Optimized RBF neural network based on gradient descent algorithm, it will be integrated neural network and PID control technology, with a conventional PID controller has simple structure, physical meaning is clear advantages, at the same time with neural network self-learning, adaptive function. Therefore, this article through to the RBF neural network structure and the calculation method of learning, to design a setting of the PID controller based on RBF neural network, constructs its model, and then write M language program. Using the MATLAB software to design the RBF neural network setting of PID control algorithm simulation research. Data and then further through simulation experiment, the control system stability, robustness, anti-interference ability, etc.Keywords: PID; RBF neural network; Parameter setting目录摘要 (Ⅰ)Abstract (Ⅱ)1 绪论 (1)1.1 课题研究背景及意义 (1)1.2神经网络的发展历史 (3)2 神经网络 (6)2.1神经网络的基本概念和特点 (6)2.2人工神经网络构成的基本原理 (7)2.3神经网络的结构 (8)2.3.1前馈网络 (8)2.3.2 反馈网络 (8)2.4神经网络的学习方式 (9)2.4.1监督学习(有教师学习) (9)2.4.2非监督学习(无教师学习) (9)2.4.3再励学习(强化学习) (9)2.5 RBF神经网络 (10)2.5.1 RBF神经网络的发展简史 (10)2.5.2 RBF的数学模型 (10)2.5.3被控对象Jacobian信息的辨识算法 (11)2.5.4 RBF神经网络的学习算法 (12)2.6 本章小结 (14)3 PID控制器 (14)3.1 PID控制器简介 (14)3.2 经典PID控制原理 (14)3.3 现有PID控制器参数整定方法 (16)3.4 PID控制的局限 (17)3.5本章小结 (17)4 基于RBF神经网络整定的PID控制器设计 (17)4.1 RBF神经网络的PID整定原理 (17)4.2 神经网络PID控制器的设计 (18)4.3 本章小结 (19)5 仿真分析 (19)5.1 系统的稳定性分析 (19)5.2 系统抗干扰能力分析 (21)5.3 系统鲁棒性分析 (22)5.4 本章小结 (24)结论 (25)参考文献 (26)致谢 (27)附录仿真程序 (28)1 绪论1.1 课题研究背景及意义PID控制器(按比例、积分和微分进行控制的调节器)是最早发展起来的应用经典控制理论的控制策略之一,是工业过程控制中应用最广泛,历史最悠久,生命力最强的控制方式,在目前的工业生产中,90%以上的控制器为PID控制器。
基于神经网络的PID控制
基于神经网络的PID控制课程名称:智能控制任课教师:学生姓名:学号:年月日摘要:本文基于BP神经网络的PID控制方法设计控制器,通过BP神经网络与PID的控制相结合的神经网络控制基本原理和设计来自适应的功能调节PID的的三个参数,并根据被控对象的近似数学模型来输出输入与输出并分析BP神经网络学习速率η,隐层节点数的选择原则及PID参数对控制效果的影响。
计算机的仿真结果表示,基于BP神经网络的PID控制较常规的PID控制具有更好的自适应性,能取得良好的的控制结果。
关键字:BP算法神经网络 PID控制Abstract:In this paper, based on BP neural network PID control method designed controller, through the BP neural network PID control with a combination of neural network control basic principles and design features adaptively adjusting the PID of the three parameters, and based on the controlled object approximate mathematical model to analyze the output and the input and output BP n eural network learning rate η, hidden layer nodes and PID parameter selection principle effect of the control . Computer simulation results indicated that based on BP neural network PID control compared with conventional PID control has better adaptability , can achieve good control results . Keyword:BP algorithms neural networks PID control1引言PID控制是最早发展起来的应用经典控制理论的控制策略之一,由于算法简单,鲁棒性好和可靠性高,被广泛应用于工业过程并取得了良好的控制效果。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
基于神经网络的模糊PID控制器设计与实现
随着科技的不断发展,控制技术在工业自动化中的应用越来越广泛。
PID控制器因其简单易懂、易实现的特点而被广泛使用,但是传统的PID控制器在某些场合下会出现失效的情况。
为了解决这一问题,研究者们开始着手开发基于神经网络的模糊PID控制器。
本文将介绍基于神经网络的模糊PID控制器的设计与实现。
一、控制器介绍
基于神经网络的模糊PID控制器是一种新型的控制器,它将模糊控制的优点与神经网络的处理能力相结合,形成了一种高效的自适应控制器。
该控制器利用神经网络的学习算法实现自适应参数的调节,将模糊控制中的模糊规则与神经网络的处理能力相结合,形成一种新的控制方法。
该控制器的核心思想是利用神经网络对系统进行建模,通过学习算法自适应地调节系统参数,从而实现对系统的控制。
其中,模糊控制器用于对输出进行模糊处理,神经网络用于对输入和输出进行处理,从而实现对系统的控制。
二、控制器设计
基于神经网络的模糊PID控制器的设计需要以下几个步骤:
1.系统建模
系统建模是设计基于神经网络的模糊PID控制器的第一步。
系统建模的目的是构建系统的数学模型,以便于后续的设计过程。
在建模过程中,需要考虑系统的类型、运动方程、非线性因素等因素。
2.控制器设计
控制器的设计是基于神经网络的模糊PID控制器设计的核心。
控制器的设计包括神经网络的结构设计、神经网络权值的选择、模糊控制的设计等。
3.参数调节
参数调节是控制器设计的重要环节。
由于系统的运动方程等因素的影响,不同系统的参数可能不同。
因此,在实际应用中需要根据实际情况对控制器进行参数调节。
三、控制器实现
基于神经网络的模糊PID控制器的实现需要以下步骤:
1.数据采集
数据采集是基于神经网络的模糊PID控制器实现的第一步。
数据采集的目的是获取系统的输入输出,以便为神经网络提供数据。
2.神经网络训练
神经网络训练是实现控制器的关键步骤。
在训练过程中,通过对神经网络进行学习,让它逐渐对系统的输入输出进行建模。
神经网络训练过程需要注意权值的选择、学习速率等参数的设置。
3.控制器实现
控制器实现是基于神经网络的模糊PID控制器实现的最终步骤。
在控制器实现中,需要将训练好的神经网络与模糊控制器相结合,形成一个完整的控制器。
控制器实现的过程需要注意控制器参数的选择,误差的传递等因素。
四、应用场合
基于神经网络的模糊PID控制器的应用场合广泛。
它适用于控制器复杂、非线性因素多的系统。
在真实的生产环境中,基于神经网络的模糊PID控制器被广泛应用于物流自动化、机械制造等领域。
五、总结
基于神经网络的模糊PID控制器是一种新型的控制器,具有模糊控制和神经网络处理的优点。
在实际应用中,需要根据实际情况进行控制器的设计和实现,以获得最佳控制效果。
随着科技的不断进步,基于神经网络的模糊PID控制器在工业自动化中的应用前景广阔。