电机控制窗口制作
MCGS
课题四系统组态软件操作训练实验1:编写上位机监控界面,监控传送带的运行。
要求实时显示电机的运行效果。
实验解析:上位机监控界面一般由上位机组态软件来完成。
现在国内流行的组态软件包括:MCGS、组态王、力控、WINCC等软件,同时运用高级编程语言VB也可以完成画面的制作。
本实验采用MCGS软件完成上位机监控界面的制作。
(关于MCGS的具体介绍可参见其帮助文件。
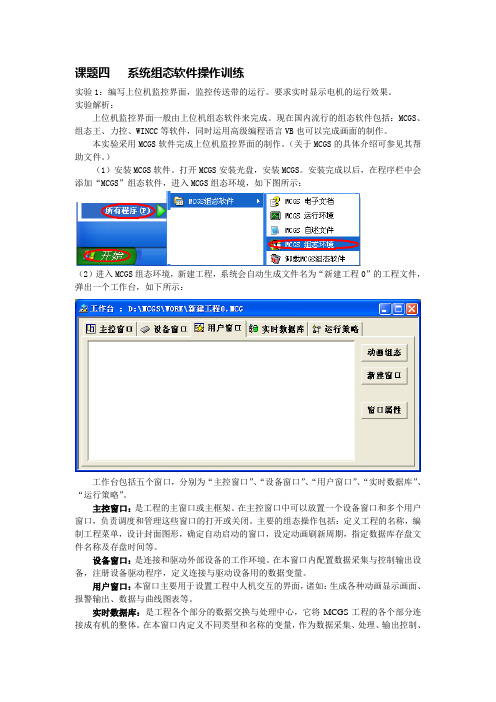
)(1)安装MCGS软件。
打开MCGS安装光盘,安装MCGS。
安装完成以后,在程序栏中会添加“MCGS”组态软件,进入MCGS组态环境,如下图所示:(2)进入MCGS组态环境,新建工程,系统会自动生成文件名为“新建工程0”的工程文件,弹出一个工作台,如下所示:工作台包括五个窗口,分别为“主控窗口”、“设备窗口”、“用户窗口”、“实时数据库”、“运行策略”。
主控窗口:是工程的主窗口或主框架。
在主控窗口中可以放置一个设备窗口和多个用户窗口,负责调度和管理这些窗口的打开或关闭。
主要的组态操作包括:定义工程的名称,编制工程菜单,设计封面图形,确定自动启动的窗口,设定动画刷新周期,指定数据库存盘文件名称及存盘时间等。
设备窗口:是连接和驱动外部设备的工作环境。
在本窗口内配置数据采集与控制输出设备,注册设备驱动程序,定义连接与驱动设备用的数据变量。
用户窗口:本窗口主要用于设置工程中人机交互的界面,诸如:生成各种动画显示画面、报警输出、数据与曲线图表等。
实时数据库:是工程各个部分的数据交换与处理中心,它将MCGS工程的各个部分连接成有机的整体。
在本窗口内定义不同类型和名称的变量,作为数据采集、处理、输出控制、动画连接及设备驱动的对象。
运行策略:本窗口主要完成工程运行流程的控制。
包括编写控制程序(if…then脚本程序),选用各种功能构件,如:数据提取、历史曲线、定时器、配方操作、多媒体输出等。
为了实现画面的监控,首先需要制作动作画面,将需要监控的图形制作出来,同时通过设置通道连接,利用计算机采集PLC里面的数据,然后将PLC的实时数据与图形画面相关的属性进行连接,就可以实现画面的动画效果,也可以监控相关的参数。
wincc弹出控制面板
Wincc之通用面板控制在一个大型的项目中可能会需要控制几十个阀门或者十几个电机类,这些阀门或者电机控制方式都是相同的。
如果我们为每一个阀门或者电机都制作一个控制面板来控制,也是可以的只是工作过程要繁琐些。
下面介绍2种控制方法,第一种是为每一个阀门或者电机配置一个控制画面,第二种是制作一个通用的控制画面,然后在主画面中通过C脚本调用这个画面。
这个方法都可以实现控制,各有优缺点,第一种控制方法优点:在主画面上可以同时调出几个不同水泵或者阀门的控制面板。
缺点:需要制作大量的控制面板。
第二种控制方法优点:只要需要制作一个控制面板即可。
缺点:制作过程有一定的复杂性。
根据自己的兴趣爱好采取适合自己控制方式,下面详细介绍这2种控制过程的制作。
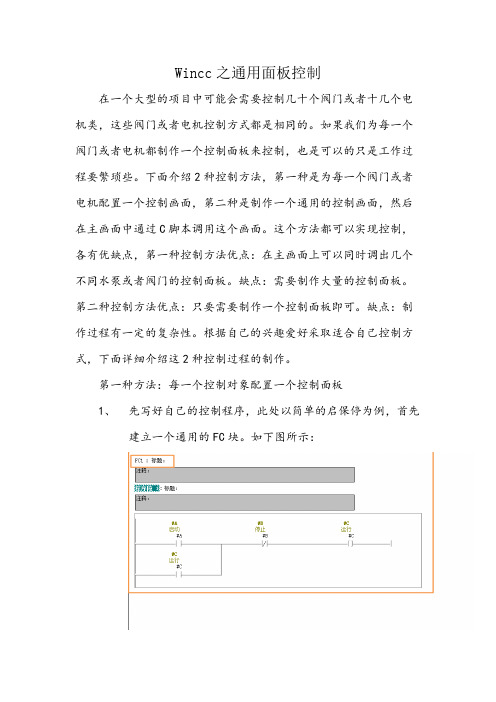
第一种方法:每一个控制对象配置一个控制面板1、先写好自己的控制程序,此处以简单的启保停为例,首先建立一个通用的FC块。
如下图所示:FC块建好之后在OB1里面调用,并为每个管脚赋予合适地址,如下图所示:M0.0为1#设备的启动 M1.0为2#设备的启动M0.1为1#设备的停止 M1.1为2#设备的停止M0.2为1#设备的输出 M1.2为2#设备的输出至此一个简单的实验程序就建立完毕了,下面开始组态wincc信息。
首先建立一个项目,然后建立一个主画面和N个控制面板画面(N=你的控制对象的个数)。
画面建立好后,开始建立变量,我实用的连接方式是MPI连接,需要进行简单参数设置后即可建立变量,此处不做演示。
变量建立后就可以与画面做关联。
如上图所示为1#、2#电机的启停及运行信号作变量连接。
变量作好关联后,在主画面中组态你想要的控制对像,在主画面中需要调用画面窗口控件,具体操作方法如下图:点击画面窗口控件后,在主面上用鼠标拖出合适大小即可。
为画面窗口关联1#、2#控制面板。
具体操作方法如下图:对准画面窗口后鼠标右击选择属性,即可弹出如图对话框,在这个对话框里可以设置一些必要的属性。
电机上位机控制及界面设计讲解
电机上位机控制及界面设计吴牛俊(自动化与电气工程学院指导教师:周克宁)摘要:随着计算机、电子、通讯技术的飞速发展,人们对于车间现场设备的运行管理控制,可视化操作等综合水平提出了新的要求。
为了满足这新的要求,本毕业设计本着“不在现场,远离现场”的原则,以C语言作为开发语言,VC为开发环境,针对某充电机产品编写了应用程序,将充电机的现场设备界面通过串口通信技术,与上位机界面有机的结合起来,以实现计算机的远程监控功能。
此外,该上位机应用软件还实现了查看充电机存储在U盘中的运行记录文件的功能。
在本毕业论文通过这个项目的开发过程,阐述了编程环境的选择,串口通讯实现远程测试的方法,通过文件操作读取U盘数据的技巧。
探讨如何在PC平台与工控机平台间建立远程测试和历史数据读取和分析的一般方法。
关键词:人机界面;串口通信;Visual C++6.0;文件操作Abstract:With the development of computer, electronics, communications technology, the people are requiring that the the operation and management of the equipment control,and the Visualization operation must develop too.To meet these new requirements, the design of the graduates base on that "not on the scene, the scene away from the principle of" and use the C language and VC environment programming the charger procedures. The design uses the communications technology to put the charger field equipment interface and PC interface combination.And it can be achieved RMON. In addition, the PC application software also can view the test records stored in the U disk.This paper through the project development process describes the following points.First is The choice of programming environments.Second is Serial Communication remote test method.Third is the skills of reading the test records stored in the U disk.Discussion on general methods that through the PC platform with the establishment of industrial computer platform for remote testing and reading historical data and analysisKeywords:Human-machine interface;Serial Communication;;Visual C++6.0;File1 绪论1.1 背景随着计算机、电子、通讯技术的飞速发展,人们对于车间现场设备的运行管理控制,可视化操作等综合水平提出了新的要求。
电机控制基于Simulink的仿真
• 单击Simulink工具栏中的“新建模型”图标; • 在MATLAB的命令窗口中选择File | New | New Model菜单项;
第5页,共191页。
依次表示新建、打开 系统模型文件
– Simulink 最重要的特性就是支持矩阵形式 的信号,它可以区分行和列向量并传递矩阵 。通过对模块做适当的配置,可以使模块能 够接受矩阵作为模块参数。
第23页,共191页。
• MATLAB Function与Function模块
除了使用上述的方式进行Simulink与MATLAB之间的数据 交互,用户还可以使用Functions and Tables 模块库中的 Function模块(简称为Fcn模块)或Functions and Tables 模块 库中的MATLAB Function模块(简称为MATLAB Fcn模块) 进行彼此间的数据交互。
(2) 在模块搜索栏中搜索所需的系统模块。
第10页,共191页。
• 例:简单系统的输入为一个正弦波信号,输出为此正弦
波信号与一个常数的乘积。要求建立系统模型,并以图形 方式输出系统运算结果。 • 已知系统的数学描述为
系统输入: u(t)=sin t , t≥0
系统输出: y(t)=au(t), a≠0
第14页,共191页。
3 Simulink模型仿真
• 系统模块参数设置与系统仿真参数设置
– 双击系统模块,打开系统模块的参数设置对话框。 – 在参数设置对话框中设置合适的模块参数。 • 设置合适的系统仿真参数以进行动态系统的仿真 – 在Simulation菜单的Simulation parameters...子菜单中
齿条式电动开窗机

齿条式电动开窗机齿条式电动开窗机是一种常见的窗户开启和关闭设备,它通过齿条传动来实现窗户的自动开合。
这种开窗机的适用范围广泛,可以用于家庭住宅、公共建筑、办公楼等各种场所。
本文将详细介绍齿条式电动开窗机的工作原理、特点和应用。
一、工作原理齿条式电动开窗机的工作原理非常简单,它通过电机驱动齿条的运动,进而推动窗户的开启和关闭。
具体来说,当电机启动时,驱动齿条开始旋转,齿条上的齿轮与窗户上的传动装置相连,窗户随之开启或关闭。
在正常使用时,电动开窗机可以实现窗户的远程控制,用户只需要按下开关按钮,就能够实现窗户的自动开合。
二、特点1. 方便易用:齿条式电动开窗机操作简单,用户只需要轻轻按下开关按钮,就能够实现窗户的开合。
这种设计非常方便老人和体力较弱的人群使用,也减少了用户的操作负担。
2. 安全性高:齿条式电动开窗机具有良好的安全性能。
它采用了专业的传动装置和安全保护措施,确保窗户在运行过程中的稳定性和安全性。
同时,开窗机还配备了防跌落装置,一旦窗户出现故障或异常情况,会自动停止运行,确保使用者的人身安全。
3. 静音运行:开窗机的电动驱动装置采用了先进的技术,具有较低的噪音水平。
在窗户开合的过程中,几乎听不到明显的噪音,不会对用户的日常生活和工作造成干扰。
4. 多功能性:齿条式电动开窗机可配备多种控制模式和功能。
用户可以根据需要选择遥控、智能控制、定时开关等不同的操作方式。
此外,开窗机还可以与其他智能家居系统进行集成,实现更智能化的窗户管理。
三、应用领域齿条式电动开窗机在各个领域都有广泛的应用。
以下是一些典型的应用场景:1. 家庭住宅:开窗机可安装在卧室、客厅、厨房等区域的窗户上,方便用户在不离开座位的情况下控制窗户的开合,实现自动通风和采光。
2. 公共建筑:学校、医院、商场等公共建筑通常有大量的窗户,使用开窗机可以方便地管理和控制窗户的开合状态,提高室内空气质量和舒适度。
3. 办公楼:开窗机可以安装在办公楼的高处窗户上,实现远程开关和智能控制,避免人工操作带来的不便和危险。
尚控86闭环电机控制器说明书

尚控86闭环电机控制器说明书设置步骤1、电机控制保护器通电后,数字窗口显示000。
2、长按【设置】键3秒,进入设置模式(电机静止状态,电流为0时,能进入设置状态;电机运行时,电流不为0,不能进入设置状态,但可查询设置内容)。
显示屏显示“1设置”,进入电流变比设置,按【△】【√】键,设置变比值,按一下【△】进一位,按【√】下降一位,长按能连发。
设置范围1~160,用户可设置为外置电流互感器的变比值。
设置变比值后,按【设置】键,跳到下一设置项目。
3、设置过电流动作值:显示屏显示“过载XXX设置”及电流单位安(A),按【△】【√】键设置过电流动作值;也可选择关闭,关闭时设置菜单直接跳转到相序设置项;按【设置】键跳到下一设置项目。
4、设置复位电流值:显示屏显示“欠载XXX设置”及电流单位安((A),按【△】【√】键,设置控制保护器机复位电流值;按【设置】键跳到下一设置项目。
5、设置电流判定值:显示屏显示“欠载过载﹐设置﹑A相B相C相”,按【△】【√】键设置,“H”表示三相最大电流,“L”表示三相最小电流,“———”表示三相平均电流;按【设置】键跳到下一设置项目。
6、设置电机启动时间:显示屏显示“q1.0设置”及时间单位秒(S),按【△】【√】键设置。
设置范围0.1~99S。
按【设置】键跳到下一设置项目。
7、设置相序保护:显示屏显示“相序设置﹐按【△】【V】键开启(ON)或关闭(OFF);按【设置】键跳到下一设置项目。
8、设置动作时间:显示屏显示“d1.0设置”及时间单位秒(S),按【△】【√】键,设置动作时间,设置范围0.1~99S;按【设置】键跳到下一设置项目。
9、设置复位方式:显示屏显示“设置”,按【△】【√】键,选择“AU”(自动复位),“HA”(手动复位),手动复位时无复位时间设置;按【设置】键跳到下一设置项目。
10、设置复位时间:显示屏显示“F1.0设置”及时间单位秒(S),按【△】【√】键,设置动作时间,设置范围0.1~~99S;按【设置】键跳到下一设置项目。
四节传送带的模拟的MCGS界面控制设计
CHANGZHOU INSTITUTE OF TECHNOLOGY组态软件与触摸屏控制技术课程设计报告书题目:四级传送系统的MCGS界面控制设计二级学院(直属学部):延陵学院专业:电气工程及其自动化班级:学生姓名:学号:指导教师姓名:史建平职称:副教授2012年 10月29日目录目录 2第一章传送系统的MCGS监控设计 2一、四节传送带的控制要求 2二、控制指标 3三、控制方案 41.制流程图 42.PLC外部接线图 43.PLC I/O地址表(表1-1所示) 6第二章针对控制要求设计MCGS控制界面MCGS控制方案 6一、MCGS设计具体步骤 7二、整体画面 11三、设置各个元件属性如下图所示 12第三章 PLC程序设计 151.程序设计思想 152.程序解释 153.具体程序如下图所示 16第四章联机调试 181.设备窗口设置 182. 添加通讯父设备 193.添加子设备 204.父设备属性设置如下图所示 215.子设备属性设置 226、通道连接设置 22第五章触摸屏控制 24第六章实验调试与分析 28第七章实验小结 31第一章传送系统的MCGS监控设计一、四节传送带的控制要求本实验是一个用四条皮带运输机的传送系统,分别用四台电动机带动,控制要求如下:启动时先起动最末一条皮带机,经过1秒延时,再依次起动其它皮带机。
停止时应先停止最前一条皮带机,待料运送完毕后再依次停止其它皮带机。
当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
例如M2故障,M1、M2立即停,经过1秒延时后,M3停,再过1秒,M4停。
当某条皮带机上有重物时,该皮带机前面的皮带机停止,该皮带机运行1秒后停,而该皮带机以后的皮带机待料运完后才停止。
例如,M3上有重物,M1、M2立即停,再过1秒,M4停。
如图:二、控制指标1.设计MCGS控制界面2.PLC控制程序3.机调试三、控制方案1.制流程图3-1 流程图2.PLC外部接线图图3-2 PLC外部接线图4-3 PLC控制接线面板3.PLC I/O地址表(表1-1所示)1-1 输入输出地址表输入SB1 SB2 A B C D 输出KM1 KM2 KM3 KM4 X0 X5 X1 X2 X3 X4 Y1 Y2 Y3 Y4第2章针对控制要求设计MCGS控制界面MCGS控制方案按下启动按钮SB1,传送带分别从M4到M1延时1S依次启动,在MCGS监控界面上,对应的M1到M4依次启动,当某条皮带机发生故障时,该皮带机及其前面的皮带机立即停止,而该皮带机以后的皮带机待运完后才停止。
maxwell软件--快速入门
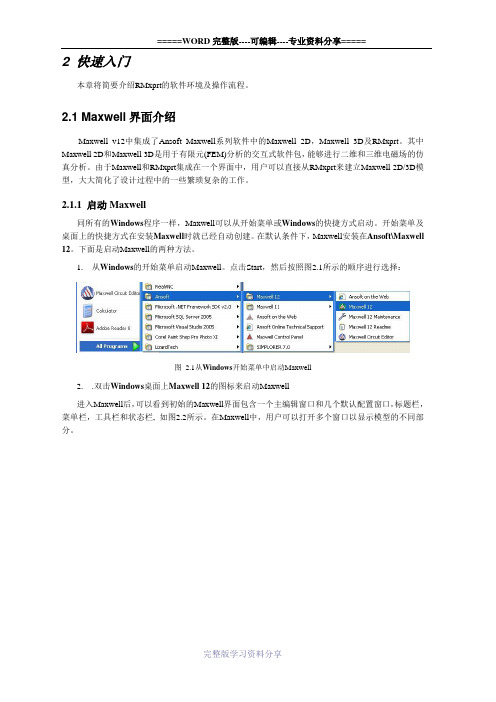
2 快速入门本章将简要介绍RMxprt的软件环境及操作流程。
2.1 Maxwell界面介绍Maxwell v12中集成了Ansoft Maxwell系列软件中的Maxwell 2D,Maxwell 3D及RMxprt。
其中Maxwell 2D和Maxwell 3D是用于有限元(FEM)分析的交互式软件包,能够进行二维和三维电磁场的仿真分析。
由于Maxwell和RMxprt集成在一个界面中,用户可以直接从RMxprt来建立Maxwell 2D/3D模型,大大简化了设计过程中的一些繁琐复杂的工作。
2.1.1 启动Maxwell同所有的Windows程序一样,Maxwell可以从开始菜单或Windows的快捷方式启动。
开始菜单及桌面上的快捷方式在安装Maxwell时就已经自动创建。
在默认条件下,Maxwell安装在Ansoft\Maxwell 12。
下面是启动Maxwell的两种方法。
1.从Windows的开始菜单启动Maxwell。
点击Start,然后按照图2.1所示的顺序进行选择:图 2.1从Windows开始菜单中启动Maxwell2..双击Windows桌面上Maxwell 12的图标来启动Maxwell进入Maxwell后,可以看到初始的Maxwell界面包含一个主编辑窗口和几个默认配置窗口,标题栏,菜单栏,工具栏和状态栏, 如图2.2所示。
在Maxwell中,用户可以打开多个窗口以显示模型的不同部分。
图 2.2 Maxwell界面2.1.2 退出Maxwell像所有的Windows程序一样,有很多种途径来退出Maxwell界面。
1.通过菜单栏的File>Exit命令来退出Maxwell, 如图2.3所示。
也可以通过快捷键Alt+F, X。
图 2.3 通过菜单栏命令退出Maxwell2.通过标题栏命令Close来退出Maxwell(在标题栏的Maxwell图标上单击鼠标左键), 如图2.4所示。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
//手/自动切换
SetTagBit(GetTagChar("M_AUTO"),!GetTagBit(GetTagChar("M_AUTO")));
}
}
(10)设置报警复位按钮:首先添加一个按钮,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,在对象属性对话框中设置事件属性,选择事件,选择选择按钮下的鼠标事件,选择鼠标动作,单击右键,选择C动作,添加程序,程序如下:
其中M_ZN、M_AUTO(内部变量,文本变量8位字符集)
数据类型:模拟量
表达式/公式结果:
1.数值范围1:等于0;否
2.数值范围2:等于1;是
3.数值范围3:等于2;否
4.数值范围4:等于3;否
5.其他:否
再次设置事件属性,选择事件,选择选择按钮下的鼠标事件,选择鼠标动作,单击右键,选择C动作,添加程序,程序如下:
3) :首先从图库中添加该图标,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,选择事件,选择对象事件,选择单击,单击右键,选择C动作,添加程序,程序如下:
#include "apdefap.h"
void Click(char* lpszPictureName, char* lpszObjectName )
MessageBox(FindWindow(NULL,"WinCC-运行系统- " ),"该阀现处于就地控制状态,禁止操作!","注意",MB_ICONWARNING);
return;
}
else
{
//如果该阀自动=0则提示用户并禁止用户操作,
if (GetTagBitWait(GetTagChar("M_AUTO")))
{
//启动阀
SetTagBitWait(GetTagChar("M_ZS"),1);
SetTagBitWait(GetTagChar("M_ZD"),0);
}
}
}
(8)停止按钮设置:首先添加一个按钮,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,设置事件属性,选择事件,选择选择按钮下的鼠标事件,选择鼠标动作,单击右键,选择C动作,添加程序,程序如下:
其中:M_ZF、ZS_F、ZD_F、M_ZF1(内部变量,文本变量8位字符集)
数据类型:模拟量
表达式/公式结果:
1.数值范围1:等于0;否
2.数值范围2:等于1;是
3.数值范围3:等于2;是
4.数值范围4:等于3;是
5.数值范围5:等于4;是
6.数值范围6:等于5;是
7.数值范围7:等于6;是
8.数值范围8:等于7;是
{
//如果该阀自动=0 ,提示用户并结束程序
MessageBox(FindWindow(NULL,"WinCC-运行系统- " ),"该阀现处于计算机自动控制状态,禁止操作!","注意",MB_ICONWARNING);
return;
}
else
{
if (MessageBox(FindWindow(NULL,"WinCC-运行系统- " ),"是否需要启动!","注意",MB_ICONWARNING|MB_YESNO) == IDYES )
2.数值范围2:等于1;颜色为黄色
3.数值范围3:等于2;颜色为黄色
4.数值范围4:等于3;颜色为黄色
5.数值范围5:等于4;颜色为黄色
6.数值范围6:等于5;颜色为黄色
7.数值范围7:等于6;颜色为黄色
8.数值范围8:等于7;颜色为黄色
9.其他:灰色
在对象属性对话框其次选择字体属性,设置字体属性为文本,静态填写为设备状态,动态选择动作对话框,在表达式/公式中添加变量:
#include "apdefap.h"
void OnClick(char* lpszPictureName, char* lpszObjectName, char* lpszPropertTagChar("AdWindowsName1"),GetTagChar("SetWindowsName"),TRUE);
GetTagBit(GetTagChar("M_AUTO"))
其中M_AUTO(内部变量,文本变量8位字符集)
1.是/真:手动
2.否/假:自动
其次设置事件属性,选择事件,选择选择按钮下的鼠标事件,选择鼠标动作,单击右键,选择C动作,添加程序,程序如下:
#include "apdefap.h"
void OnClick(char* lpszPictureName, char* lpszObjectName, char* lpszPropertyName)
其中M_SF和M_SS为内部变量,文本变量8位字符集。
数据类型:选择模拟量
表达式/公式结果:
1.数值范围1:等于0;颜色为绿色
2.数值范围2:等于1;颜色为红色
3.数值范围3:等于2;颜色为绿色
4.数值范围4:等于3;颜色为黄色
5数值范围5:等于4;颜色为灰色
6.其他:灰色。
在对象属性对话框其次选择字体属性,设置字体属性为文本,静态填写为设备状态,动态选择动作对话框,在表达式/公式中添加变量:
电机控制窗口制作
1)设备名称:首先添加个静态文本框,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,选择属性中的字体属性,设置字体属性中的文本属性,静态填写设备名称,动态添加变量Y_NAME(为内部变量,文本变量8位字符集),更新周期为有变化时。
2)设备编号:首先添加个静态文本框,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,选择属性中的字体属性,设置字体属性中的文本属性,静态填写设备编号,动态添加变量Y_KKS(为内部变量,文本变量8位字符集),更新周期为有变化时。
9.数值范围9:等于8;设备软启动故障
10.其他:设备故障分析
在对象属性对话框再次选择选择闪烁属性,设置闪烁属性中的背景闪烁激活属性,静态设置为否,动态选择动作对话框,在表达式/公式中添加变量:
GetTagBit(GetTagChar("M_ZF"))+GetTagBit(GetTagChar("ZS_F"))*2+GetTagBit(GetTagChar("ZD_F"))*4+GetTagBit(GetTagChar("M_ZF1"))*8
GetTagBitWait(GetTagChar("M_FLAG"))
("M_FLAG"内部变量,文本变量8位字符集)
数据类型:布尔型
表达式/公式结果:
是/真:取消挂牌
否/假:维修挂牌
其次设置事件属性,选择事件,选择选择按钮下的鼠标事件,选择鼠标动作,单击右键,选择C动作,添加程序,程序如下
GetTagBit(GetTagChar("M_SF"))+GetTagBit(GetTagChar("M_SS"))*2
其中M_SF和M_SS为内部变量,文本变量8位字符集。
数据类型:模拟量
表达式/公式结果:
1.数值范围1:等于0;设备停止
2.数值范围2:等于1;设备运行
3.数值范围3:等于2;设备停止
GetTagBit(GetTagChar("M_ZF"))+GetTagBit(GetTagChar("ZS_F"))*2+GetTagBit(GetTagChar("ZD_F"))*4+GetTagBit(GetTagChar("M_ZF1"))*8
其中:M_ZF、ZS_F、ZD_F、M_ZF1(内部变量,文本变量8位字符集)
{
SetTagBitWait(GetTagChar("M_ZS"),0);
SetTagBitWait(GetTagChar("M_ZD"),1);
}
(9)设置手/自动按钮:首先添加一个按钮,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,在对象属性对话框中首先选择字体属性,设置文本属性,静态设置为手/自动,设置动态选择动作对话框,在表达式/公式中添加变量:
#include "apdefap.h"
void OnClick(char* lpszPictureName, char* lpszObjectName, char* lpszPropertyName)
{
if (MessageBox(FindWindow(NULL,"WinCC-运行系统- " ),"是否需要停止!","注意",MB_ICONWARNING|MB_YESNO) == IDYES )
{
SetVisible("运行画面","电机控制帮助窗口",TRUE);}
4)设备状态:首先添加个静态文本框,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,首先选择颜色属性,选择背景颜色,单击右键选择动作对话框,在表达式/公式中添加变量:
GetTagBit(GetTagChar("M_SF"))+GetTagBit(GetTagChar("M_SS"))*2
4.数值范围4:等于3;反馈错误
5.其他:设备状态
5)设备控制方式:首先添加个静态文本框,单击右键出现选择对话框,单击选择属性,出现对象属性对话框,选择属性中的字体属性,设置字体属性中的文本属性,静态填写设备控制方式,动态选择动作对话框,在表达式/公式中添加变量: