增量式编码器的接口电路设计_顾越州
一种增量编码器的接口电路设计
• 199•引言:在自动控制领域,电编码器常用于速度与位置的检测。
增量式编码器不能直接获得转动系统的速度和位置信息,只能通过处编码器输出的两路脉冲信号来计算这两个位置的相对角度差。
本文设计了一种通用的增量式编码器计数和辨向电路,可以将编码器输出的两路脉冲信号处理为倍频脉冲信号和转向电平信号,直接进入单片机处理器进行计数和判定旋转方向。
1.编码器接口电路原理增量式编码器跟随电机转动时,会输出 A 、B 两路脉冲信号,相位相差90°。
脉冲的个数代表转动角度,频率代表转动速度,A 、B 两相信号的超前或者滞后关系代表编码器的转动方向,如图1所示。
图1 增量式编码器信号输出2.编码器接口电路设计及仿真增量式编码器接口电路由积分电路、两个施密特非门电路、四个异或门电路和三个D 触发器组成,如图2所示。
一种增量编码器的接口电路设计湖南铁道职业技术学院 刘 彤 赵巧妮集美大学轮机工程学院 刘 传图2 增量式编码器接口电路A 、B 两相信号分别与各自经过积分电路的信号做异或运算,在A 相信号发生变化时,异或门U3A 输出端口将产生一个跳变沿,B 相信号发生变化时,异或门U3B 输出端口也将产生一个跳变沿。
异或门的跳变沿输出信号分别接入两个D 触发器的时钟触发端,为信号的判读提供时钟。
当A 相异或输出信号U3A 为D 触发器U4A 提供时钟脉冲,A 、B 两相信号进行异或经U3C 输出到D 触发器U4A 的D 端口。
如果A 相信号超前B 相信号90度,D 触发器U4A 的Q 端输出低电平的转动方向信号,如图3所示。
• 200•图3 A相超前B相90度方向信号仿真如果A 相信号滞后B 相信号90度,D 触发器U4A 的Q 端输出高电平的转动方向信号,如图4所示。
图4 B相超前A相90度方向信号仿真A 相跳变沿信号输出接D 触发器U5B 时钟触发端,B 相信号接U5B 的D 输入端,B 相跳变沿信号输出接D 触发器U5A 时钟触发端,A 相信号接U5A 的D 输入端,D 触发器U5A 和U5B 的输出端经异或门电路U3D ,在跳变沿的时钟下严格输出倍频信号,增加了计数脉冲数量,提高测量精度,倍频仿真波形如图5所示。
增量式光电编码器信号处理电路的设计与实现

增量式光电编码器信号处理电路的设计与实现光电编码器是一种常见的位置检测装置,可以通过判断旋转轴的位移来测量出目标位置的具体值。
然而,在某些特殊的应用环境下,需要对光电编码器进行增量式测量,这时通过对编码器的信号进行特殊处理,从而实现精度更高的位置测量。
针对以上需求,本文将介绍一种增量式光电编码器信号处理电路的设计与实现方法。
一、需求分析在进行增量式光电编码器信号处理电路设计前,需要先明确具体的需求。
针对增量式光电编码器的测量要求,我们需要实现以下功能:1. 能够对编码器的信号进行较高频率的采样,以保证精度。
2. 能够处理编码器的A/B相信号,实现增量式测量。
3. 能够对编码器的Z相信号进行特殊处理,以完成一次完整的位置测量。
二、电路设计在明确了需求之后,我们可以开始进行电路设计。
具体的其中关键部分包括定时器、计数器、滤波器等,下面我们对这些部分进行详细介绍。
1. 定时器定时器是整个电路的核心部分,主要负责对编码器信号的采样。
我们可以通过将定时器设置为高频率的时钟源,从而实现对信号的高频采样。
在具体实现时,我们可以使用555定时器,将电容和电阻设置为合适的值,从而得到合适的定时器频率。
2. 计数器计数器负责实现增量式测量。
我们可以通过将A相和B相信号分别连接至计数器的计数端口,从而实现对编码器的增量式测量。
在具体实现时,我们可以使用74LS193计数器芯片进行实现。
3. 滤波器滤波器则负责对编码器的Z相信号进行特殊处理,完成一次完整的位置测量。
具体实现时,我们可以将Z相信号连接至RC滤波器,从而得到平滑的脉冲信号。
接着,将平滑后的脉冲信号连接至脉冲捕捉器,从而完成一次完整的位置测量。
三、实现效果通过以上电路设计,最终可以得到一种高精度、可靠的增量式光电编码器信号处理电路。
在具体实现时,我们需要注意以下几点:1. 设置合适的电路参数值。
2. 使用高品质的电子元器件,以保证可靠性和高精度性。
3. 进行系统调试和测试,以验证电路的稳定性和可靠性。
常州大学增量式编码器方向判别和计数电路设计显示电路
学号:13481120常州大学《机电一体化系统》课程设计题目增量编码器方向判别和计数电路设计学生王春来学院机械工程学院专业班级机电131校内指导教师俞竹青专业技术职务教授校外指导老师专业技术职务二○一七年一月任务书1.设计题目增量编码器方向判别和计数电路设计2. 设计内容设计内容主要包括:查资料、总体设计、原理图、元器件选型、PCB、课程设计说明书六个部分。
课程设计的最后要求是写出课程设计说明书,把总体设计、原理图、元器件选型、PCB过程进行全面的说明,上升到一定高度。
具体设计步骤如下:2.1总体方案设计根据技术指标的功能要求,确定电路的总体构成,一般为信号拾取电路、信号处理电路、显示电路等。
2.2关键元器件选型根据技术要求和设计总体方案选择合适的元器件,以实现电路的功能。
2.3电路原理图根据设计总体方案和关键元器件的型号参数设计电路原理图。
2.4 PCB图根据电路原理图和元器件封装形式设计PCB图。
2.5 编写设计说明书把设计过程的总体设计方案、参数计算、元器件选型依据、实现的波形等内容编写成设计说明书。
增量式编码器方向判别和计数电路设计摘要:本设计电路分为电源电路、方向判别电路和计数电路。
电源电路通过变压器降压和全桥整流,将交流电压转化成单脉冲电压。
然后使用电容滤波和稳压器稳压,将电压控制在各芯片的电源电压5V。
方向判别电路由芯片AT288a芯片根据A、B两信号顺序,将增量式编码器的两相脉冲信号转化为正向和反向的脉冲信号,来作为计数电路的输入方向信号。
计数电路是将两片74LS192组合实现8位电路计数的功能。
因为正转时A相超过B相90°,反转时A相落后B相°,而且脉冲的个数与位移量成比例的关系,当对象发生变化时,对脉冲个数的计算(有方向地累加和减少)得到相应的位移,可以更好地实现闭环有效的控制。
最后将计数电路所得到的二进制转数利用74LS283和74LS46的芯片转化成BCD码在LED数码管上显示。
增量型编码器信号类型及其接口探究

增量型编码器信号类型及其接口探究摘要:在增量型编码器工作过程中,主要需要完成信号采集、处理和输出。
而不同类型编码器信号类型及其输出接口存在差异,未能正确选择将造成装置无法正常使用。
基于此,本文在分析增量型编码器原理基础上,对TTL、RS422等常见信号类型及接口进行了探究,为装置的选用提供参考。
关键词:增量型编码器;信号类型;输出接口引言:增量型编码器属于光电传感器,能够对机械运动和位移进行检测,将检测得到的模拟信号转换为数字信号,对位置、角度等参数进行测量。
在自动化系统中,该种编码器得到了广泛应用,能够与控制器、计数器、变频器等不同驱动装置连接,为数据采集和设备控制提供信号支撑。
而在不同领域使用,还要选择信号接口相匹配的编码器,因此还应加强装置信号类型及接口研究。
1增量型编码器工作原理在增量型编码器中,主要包含信号采集和信号处理两个部分。
其中,采集部分包含发光元件、码盘、主轴等元器件,用于将光信号转换为电信号,其中隐含运动信息。
信号处理部分由放大、整形和细分电路构成,能够将采集的信号转化为数字量,按照固定格式输出。
利用编码器进行运动测量,使用的码盘由测量和指示两种光栅盘构成,相对运动将产生90°相位角。
得到的信号为莫尔条纹正弦信号,通过运算放大器处理后可以输出正弦信号A和B,相位差为90°,分别为倍频脉冲信号和转向电信号[1]。
其中,脉冲用于对转动角度进行反映,频率用于对转动速度进行反映。
根据信号超前或滞后关系,能够分析得到转动角度。
作为高精密仪器,增量型编码器在使用过程中直接与自动化控制设备连接容易导致装置承受过大载荷,因此需要采用弹性或同步带等联轴器加强保护。
应避免刚性联接,并确保扭矩不超1N·m,对轴向偏角和同轴度也有一定要求。
但除此之外,增量型编码器也将输出不同信号,配备的接口存在兼容性问题。
在输出接口与接收端口无法匹配的情况下,将导致信号传输不稳问题的发生,在自动化控制系统中则反馈为设备不兼容。
基于FPGA增量式编码器的接口设计与实现

文中设计了一个基于FPGA的简单且精度高的接口电路,其结构简单、性能可靠。具有滤波、硬件辨向、4倍频计数和数据锁存等功能。计数结果以并口输出,可与PC机、ARM或FPGA等部件进行并行通信。同时在并口之前,用锁存电路来消除硬件电路延时所可能引起韵计数错误,减轻了后续微机的负担,可提高被控对象的测量和控制精度。
运用FPGA实现4倍频、鉴相电路,采用全数字反馈电路的设计方法,由于倍频、鉴相电路设计在同一芯片上,一方面,FPGA门电路高数量较大,时钟频率可达上百MHz的可编程逻辑器件,可以把他设计成所需的各种逻辑器件,可并行处理多项任务。因此处理速度比单片机或DSP快得多;另一方面,芯片内部的门电路、触发器的参数特性完全一致,能保证在相同转速下4倍频脉冲信号的周期保持一致。作为板级芯片,电路做在芯片内部,其抗干扰能力比分离器件有很大提高。同时,由于现场可编程,可以方便地实现对电路的重新设计或修改,增强了系统的灵活性、通用性和可靠性。
3 仿真波形
用Verilog HDL语言完成电路描述,各功能模块运用原理图方式进行描述,芯片采用Ahera公司Cyclone系列的EP1C12Q240C8N。在Quart-usII10.0环境下进行功能和时序仿真。编译后结果,A、B即为差分整形电路的输出,当A相超前B相时,输出正向4倍频脉冲,OA[7..0]为编码器正转时4倍频脉冲个数;反之,输出反向4倍频脉冲,OB[7..0]为反转时4倍频脉冲个数。利用OA[7..0]与OB[7..0]可以方便地实现编码器的可逆计数。
增量式编码器与Atmega128单片机接口及程序实现方法

增量式编码器与 Atmega128 单片机接口及程序实现方法王景辉(中兴利联国际贸易有限公司,上海 201611)摘 要:以 NE MICO N 1000P/R 增量式编码器与 Atmega128 接口为例,介绍增量式编码器的一种接口方式 ,以程 序实例介绍程序实现方法,把对应角位置数值显示到 YM0802 液晶上面。
关键词:增量式编码器;接口电路;接口程序;Atmega128;Y M0802B 液晶显示The Interface of Incremental Encoder and Atmega128 MCU andProgramming Implementation MethodWANG J ing-hu i(Zhong X ing Li L i a n I nt e rnat i ona l Trading Co., LTD, S hangha i 201611, China)Abs trac t :A n i nter f ac e mode of incremental encoder is introduced using the example of inter f ac e of NE MICON 1000P /R incremental encoder and Atmega128. The programming implementation is introduced using the program example. Th e YM0802 liquid is used to display the corresponding angle position valu e.Keywords :incremental encoder ;inter f ac e circu it ;inter f ac e program ;atmega128;YM0208B liquid display 增量式编码器有 A 、B 、Z 3 个信号输出点,其中 A YM0802 液晶显示器与单片机的硬件线路图如图 2 所示。
编码器接线图
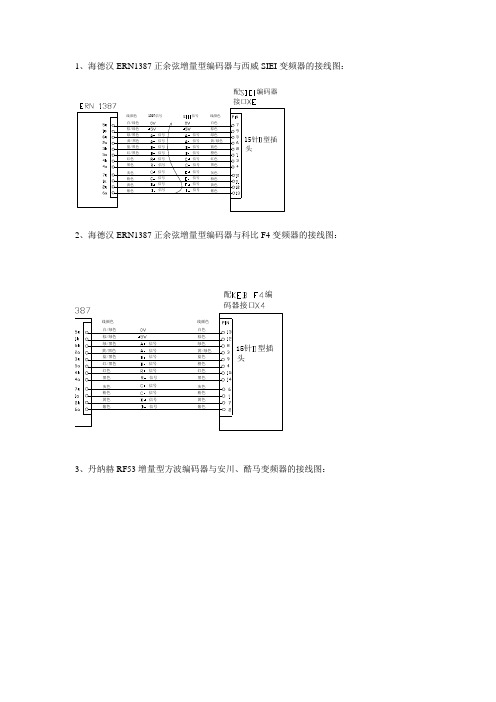
1、海德汉ERN1387正余弦增量型编码器与西威SIEI 变频器的接线图: 信号1387信号信号信号信号信号信号信号信号信号信号信号配
编码器接口
黄/黑色
白/绿色
棕/绿色
绿/黑色
蓝/黑色
红/黑色
红色
黑色
线颜色
紫色黄色
粉色
灰色灰色粉色黄色紫色15针型插头
线颜色黑色红色橙色蓝色黄/绿色绿色棕色白色信号信号信号信号信号信号信号信号信号信号
2、海德汉ERN1387正余弦增量型编码器与科比F4变频器的接线图:
配
编码器接口
黄/黑色
白/绿色
棕/绿色
绿/黑色
蓝/黑色
红/黑色
红色
黑色
线颜色
紫色黄色
粉色
灰色
灰色粉色黄色紫色15针型插头
线颜色黑色红色橙色蓝色黄/绿色绿色棕色白色信号信号信号信号信号信号信号信号信号信号
3、丹纳赫RF53增量型方波编码器与安川、酷马变频器的接线图:
紫/黑
紫
绿/黑
绿
蓝/黑
蓝
红黑
4、丹纳赫RF53增量型方波编码器与爱默生变频器EV3100接线图:
信号信号信号信号信号信号信号信号信号信号信号信号绿色棕/黑色绿/黑色灰/黑色蓝/黑色白色蓝色黑色棕色红色灰色紫/黑色
白/黑色紫色信号信号信号紫色
白/黑色
紫/黑色信号信号配编
码器接口
灰色
红色
棕色
黑色
蓝色
白色
蓝/黑色线颜色
灰/黑色
绿/黑色
棕/黑色
绿色
15针型插头
线颜色信号信号信号信号信号信号信号信号 信号。
一种增量编码器的接口电路设计

一种增量编码器的接口电路设计增量编码器是一种常用于测量旋转或线性位移的传感器。
它通过检测和计算传感器输出的变化量来测量物体的位移。
以下是一种基于Arduino的增量编码器接口电路设计。
Arduino是一种开源的微控制器平台,具有广泛的应用领域。
它可以和各种传感器、执行器以及其他电子元件进行通信和集成。
在增量编码器接口电路设计中,Arduino将用于读取传感器的输出并计算物体的位移。
设计需求:1.适用于增量式光电编码器。
2.稳定的电源供应。
3. 可通过Arduino读取并处理编码器输出。
电路设计:1. 电源供应电路:使用稳定的5V电源。
可以使用一个电源适配器或者将Arduino板上的5V引脚连接到电源线路上。
2. 增量编码器连接:将编码器的输出端连接到Arduino板上的两个数字引脚(例如2和3)。
编码器通常具有两个输出信号(A相和B相),它们的相位差可以用来确定位移的方向。
3. 电源接地:将Arduino板上的地引脚连接到电源地线上。
这样做可以确保接地连接,以减少电磁干扰和噪声。
4. Arduino编程:使用Arduino IDE编写程序来读取和处理编码器的输出。
在程序中,首先需要初始化两个数字引脚作为输入,并将它们设置为中断源。
接着,编写中断处理函数,该函数在每个脉冲到达时被触发。
在函数中,通过读取两个引脚的当前状态和上一个状态来判断编码器方向的变化,并对位移进行计算。
以下是一个简单的Arduino程序示例:```cint pinA = 2;int pinB = 3;volatile long count = 0;void setupinMode(pinA, INPUT);pinMode(pinB, INPUT);attachInterrupt(digitalPinToInterrupt(pinA), encoderInterrupt, CHANGE);attachInterrupt(digitalPinToInterrupt(pinB), encoderInterrupt, CHANGE);void loo//读取位移值并进行处理long displacement = count; // 保存当前位移值//在这里可以对位移进行其他处理,例如输出、显示等void encoderInterrupint stateA = digitalRead(pinA);int stateB = digitalRead(pinB);if (stateA == stateB)count++;} elsecount--;}```上述程序中,`pinA`和`pinB`分别是连接编码器输出的两个引脚。