发那科机器人常见故障代码和故障处理方法.docx
FANUC发那科工业机器人常见报警的解释

第一章常见报警的解释1.1 368报警(串行数据错误)上图中368报警以及相关编码器报警的原因有:(1)电机后面的编码器有问题,如果客户的加工环境很差,有时会有切削液或液压油浸入编码器中导致编码器故障。
(2)编码器的反馈电缆有问题,电缆两侧的插头没有插好。
由于机床在移动过程中,坦克链会带动反馈电缆一起动,这样就会造成反馈电缆被挤压或磨损而损坏,从而导致系统报警。
尤其是偶然的编码器方面的报警,很大可能是反馈电缆磨损所致。
(3)伺服放大器的控制侧电路板损坏。
解决方案:(1)把此电机上的编码器跟其他电机上的同型号编码器进行互换,如果互换后故障转移说明编码器本身已经损坏。
1(2)把伺服放大器跟其同型号的放大器互换,如果互换后故障转移说明放大器有故障。
(3)更换编码器的反馈电缆,注意有的时候反馈电缆损坏后会造成编码器或放大器烧坏,所以最好先确认反馈电缆是否正常。
1.2 电源模块PSM控制板内风扇故障443,610上图报警是电源模块控制板内风扇损坏导致的报警(使用αi电源模块时),报警时电源模块PSM的LED显示“2”,主轴放大器SPM的LED显示“59”。
拆下电源模块控制板后,风扇位置如下图所示:21.3 主轴放大器SPM内冷风扇故障此故障没有画面报警信息,但是有上图的“FAN”在闪烁,此现象表明主轴放大器SPM的内冷风扇出现了故障。
1.4 伺服放大器SVM内冷风扇报警608,4443上图中的报警表示伺服放大器SVM的内冷风扇出现了故障(Z轴和A轴同时出现报警是因为Z轴和A轴是同一个放大器控制的)。
上图中的报警出现时对应的伺服放大器上的LED 显示“1”。
1.5 主轴放大器和伺服放大器的内冷风扇位置4上图中:(1)主轴放大器内冷风扇的安装位置(2)伺服放大器内冷风扇的安装位置(3)主轴放大器的型号A06B-6111-H X#H550(后面带#H***的都是主轴放大器)(4)伺服放大器的型号A06-6114-HX注:(1)不同型号的主轴放大器和伺服放大器对应的风扇的型号也不一样,请参考附录。
发那科机器人常见故障代码和故障处理方法

常用故障代码和故障排除方法伺服 - 001操作面板紧急停止SRVO- 001 Operator panel E-stop[现象]按下了操作箱/操作面板的紧急停止按扭。
SYST-067面板HSSB断线报警同时发生,或者配电盘上的LED(绿色)熄灭时,主板(JRS11)-配电盘(JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
(注释)[对策1]解除操作箱/操作面板的紧急停止按扭。
[对策2]确认面板开关板(CRM51)和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策4]更换配电盘。
[对策5]更换连接配电盘(JRS11)和主板(JRS11)的电缆。
在采取对策6之前,完成控制单元的所有程序和设定内容的备份。
[对策6]更换配电盘。
(注释)SYST-067面板HSSB断线报警同时发生,或RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)伺服-001操作面板紧急停止伺服-004栅栏打开サーボ-007外部紧急停止伺服-204外部(SVEMG异常)紧急停止伺服-213保险丝熔断(面板PCB)伺服-280SVOFF输入 伺服 - 002示教操作盘紧急停止SRVO- 002 Teach pendant E-stop[现象]按下了示教操作盘的紧急停止按扭。
[对策1]解除示教操作盘的紧急停止按扭。
[对策2]更换示教操作盘。
伺服 - 003紧急时自动停机开关SRVO- 003 Deadman switch released[现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策1]按下紧急时自动停机开关并使机器人操作。
[对策2]更换示教操作盘。
伺服 - 021SRDY断开(组:i轴:j)SRVO- 021 SRDY off (Group:i Axis:j)[现象]当HRDY断开时,虽然没有其他发生报警的原因,SRDY处在断开状态。
发那科报警表

发那科报警表一、后台编辑报警1.报警信息: “BP/S alarm”,BP/S报警。
报警说明: 与一般的程序编辑中发生的P/S号报警相同,发生BP/S 报警(070、071、072、073、074、085、086、087)。
2. 140号报警报警信息: “BP/S alarm”,BP/S报警。
报警说明: 在后台选择或者删除了一个在前台选中的程序。
二、程序错误报警1.000号报警报警信息: “Please turn off power”,请关闭电源。
报警说明:设定了必须关断电源才能生效的机床数据。
2.001号报警报警信息: “TH Parity alarm”,TH奇偶报警。
报警说明:TH报警(输入了不符合奇偶的字符),应修改纸带。
3.002号报警报警信息: “TV Parity alarm”,TV奇偶报警。
报警说明:TV报警(一个程序段内的字符数为奇数)。
仅在TV检测为ON时发生。
4.003号报警报警信息: “T oo many digits”,数字太多。
报警说明: 输入了超过允许位数的数据。
5.004号报警报警信息: “Address not found”,没有发现地址。
报警说明: 在程序段的开始无地址,输入了数字或符号“-”。
修改程序。
6.005号报警报警信息: “No data after address”,地址之后没有数据。
报警说明: 地址后面没有跟随数据,而出现下一个地址或者EOB码。
修改程序。
7.006号报警报警信息: “Illegal use of negative sign”,非法使用负号。
报警说明: 负号“-”输入错误(“-” 出现在不可能输入这个符号的地址中或者输入了两个以上的“-”)。
修改程序。
8.007号报警报警信息: “Illegal use of decimal point”,非法使用十进制小数点。
报警说明: 小数点“.”输入错误(小数点“.”出现在不可能输入这个符号的地址中或者输入了两个以上的“.”)。
FANUC报警内容

故障代码解释及应对措施1)SRVO–001 SVAL1 Operator panel E–stop解释:按下在操作员面板或是操作箱上的紧急停止按钮。
如果SYST-067(面板HSSB断开连接)警报也同时发生,或是如果在面板上LED指示灯(绿色)关闭不发光,主板(JRS15)和面板(JRS15)通讯异常。
主板和面板电路板之间的电缆连接可能松动。
或者,电缆,面板电路板或是主板可能有故障。
注意:如果LED指示灯是关闭不发光的,下面的警报也会产生。
SRVO–001 Operator panel E–stop.SRVO–004 Fence open.SRVO–007 External emergency stop.SRVO–199 Control stop.SRVO–204 External (SVEMG abnormal) E–stop.SRVO–213 Fuse blown (Panel PCB).SRVO–277 Panel E–stop (SVEMG abnormal).SRVO–280 SVOFF input检查显示在示教盒上显示的警报历史。
(措施1):释放在操作员面板或是操作员箱上被按下的紧急停止按钮。
(措施2):确认操面板电路板(CRT16)和急停按钮之间的连接电缆,如果有裸线,则替换电缆。
(措施3):确认连接面板电路板(CRS20或CRS1)和示教盘之间的连接电缆,如果有裸线,则替换电缆。
(措施4):当紧急停止按钮在释放的位置,检查接线端和开关的连接情况,如果没有连通,则是急停按钮的故障。
替换开关或操作面板。
(措施5):替换示教盘。
(措施6):替换面板电路板。
注意:在执行措施7前,完成整个控制器的备份来保存所有程序和设置内容。
(措施7):替换主板。
注释:与SRVO-213同时发生时,可能是因为保险丝已经熔断。
采取与SRVO-213相同的处理措施。
2) SRVO –002 SVAL1 Teach pendant E –stop解释:示教盒上的紧急停止按钮被按下。
FANUC报警信息代码
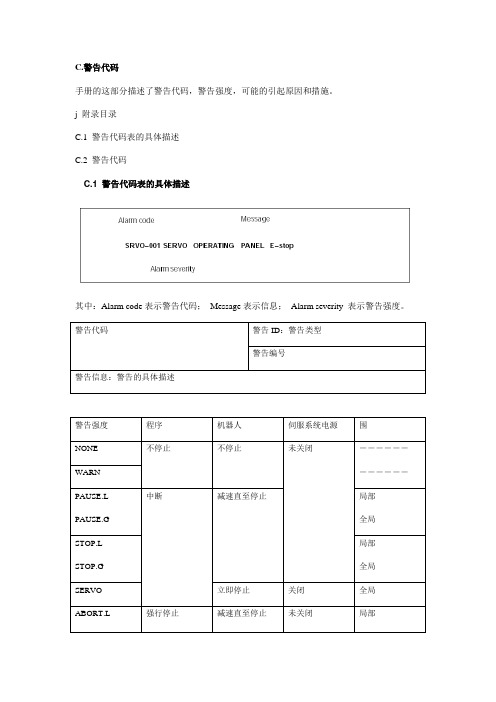
C.警告代码手册的这部分描述了警告代码,警告强度,可能的引起原因和措施。
j 附录目录C.1 警告代码表的具体描述C.2 警告代码C.1 警告代码表的具体描述其中:Alarm code表示警告代码;Message表示信息;Alarm severity 表示警告强度。
警告代码警告ID:警告类型警告编号警告信息:警告的具体描述警告强度程序机器人伺服系统电源围NONE 不停止不停止未关闭――――――――――――WARNPAUSE.L PAUSE.G 中断减速直至停止局部全局STOP.L STOP.G 局部全局SERVO 立即停止关闭全局ABORT.L 强行停止减速直至停止未关闭局部ABORT.G 全局SERVO2 立即停止关闭全局全局SYSTEM围当多个程序同时运行(多任务函数)时警告使用的违反。
局部此警告只针对引发它的程序全局此警告针对所有程序警告在程序被校正或返回执行或当从外围单元输入一个紧急制动信号或是其他警告信号时失败则会引发警告。
警告是用来提示操作员发生故障,使其为安全起见能中断处理。
提示:如果出现的警告编号不在这里给出代码,请和FANUC机器人专家联系。
警告代码显示或指示当引发了一个警告,在教导盒上的警告LED发光二极管会亮起,首先会在出现警告信息,然后会出现界面命令行。
操作员可以通过查看LED和信息得知引发了哪个警告。
图C-1 警告显示警告强度如何操作程序或机器人直到程序或机器人停止取决于引发警告的原因的严重性。
这个“严重性”被成为强度。
警告强度级别如下所示:表C-1 警告强度警告强度具体描述WARN警告WARN警告是指发生了一个相对较轻的或是相对来说并不严重的故障。
WARN警告不影响机器人的操作。
当WARN警告出现时,在教导盒没有相应的LED或操作面板灯。
为了防止可能活动警告界面活动警告界面只显示活动的警告。
一旦该警告被警告清除信号输入清除,活动警告界面显示:“没有活动的警告”。
在上一条警告清除信号输入后,界面显示警告输出。
FANUC机器人故障代码解释及应...

FANUC机器人故障代码解释及应...(1)SRVO–199 Control Stop解释:这个警报是和护栏打开警报或SVOFF输入警报一起显示出来的。
(2)SRVO–201 SVAL1 Panel E–stop or SVEMG abnormal解释:虽然按下了操作面板的紧急停止按钮,但未切断紧急停止线路。
(措施1):检查操作面板/操作箱上的紧急停止按钮,如果有必要就将其替换。
(措施 2):替换面板电路板。
(措施 3):替换急停单元(措施 4):替换伺服放大器。
注意:如果慢慢按下紧急停止按钮,这个警报也有可能发生。
(3)SRVO–202 SVAL1 TP E–stop or SVEMG abnormal解释:虽然按下了示教盒的急停按钮,但未切断紧急停止线路。
(措施1):检查示教盒连接电缆,如果有必要就将其替换。
(措施 2):替换示教盒。
(措施 3):替换面板电路板。
(措施4):替换急停单元(措施 5):替换伺服放大器。
注意:如果慢慢按下紧急停止按钮,这个警报也有可能发生。
(4)SRVO–204 SVAL1 External (SVEMG abnormal) E–stop 解释:虽然按下了面板电路板上所连接的外部急停开关,但未切断急停线路。
端子连接:双链规格:TBOP4 EES1 和EES11 之间、EES2 和EES21 之间。
单链规格:TBOP1 EMGIN1 和 EMGIN11 之间。
(措施1):检查面板电路板的端子台之间(双链规格:TBOP4 EES1 与 EES11 、EES2 与EES21,单链规格:TBOP1 EMGIN1 和 EMGIN11 之间)所连接的开关和配线,发现不良时予以替换。
(措施 2):替换面板电路板。
(措施 3):替换急停单元。
(措施 4):替换伺服放大器。
以上就是全部操作步骤,有什么不明白的可以在评论区提问。
如果本文对您有帮助,可以收藏一下!您的点赞关注是对作者最大的支持!。
发那科报警代码001-100
000请关闭电源设置了需要关闭电源的参数后必须关闭电源。
001TH奇偶校验报警TH报警(输入了不正确的奇偶校验字符)。
请纠正纸带。
TV报警(程序段中的字符数是奇数)。
TV检查有效时,此报警将002TV奇偶校验报警发生。
003数字位太多输入了超过允许位数的数据。
(参见最大指令值一项)。
004地址没找到在程序段的开始无地址而输入了数字或字符“一”。
修改程序。
005地址后面无数据地址后面无适当数据而是另一地‘址或EOB代码。
修改程序。
符号“一”输入错误(在不能使用负号的地址后输入了“一”符号006非法使用负号或输入了两个或多个“一”符号)。
修改程序。
小数点“.”输入错误(在不允许使用的地址中输入了“.”符号,或007非法使用小数点输入了两个或多个“.”符号)。
修改程序。
在有效信息区输入了不能使用的字符。
009输入非法地址修改程序。
使用了不能使用的G代码或指令了无此功能的G代码。
010不正确的G代码修改程序。
在切削进给中未指令进给速度或进给速度不当。
011无进给速度指令修改程序。
014不能指令G95没有螺纹切削/同步进给功能时,指令了同步进给。
015指令了太多的轴超过了允许的同时控制轴数。
在圆弧插补(G02或G03)中,起始点与圆弧中心的距离不同于终020超出半径公差点与圆弧中心的距离,差值超过了参数3410中指定的值。
在圆弧插补中,指令广不在所选平面内(用G17,G18,G19)的021指令了非法平面轴轴。
修改程序。
在圆弧插补中,不管是R(指定圆弧半径),还是I,J和K(指定022没有圆弧半径从起始点到中心的距离)都没有被指令。
‘在G02/G03中不能指令在圆弧插补中,指令了F1位数F0。
-025F0修改程序。
,在G43/G44中没有轴指在刀具长度补偿C的程序段G43和G44中,没有指定轴地址。
027补偿未被取消,但另一轴加了刀具长度补偿C。
令修改程序。
在平面选择指令中,同一方向上指令了两个或更多的轴。
三例FANUC 机器人控制系统故障分析及排除方法

三例FANUC 机器人控制系统故障分析及排除方法。
关键词:FANUC机器人故障分析排除例1 FANUCF-200iB七轴点焊机器人控制器断电检修后,对控制器送电,机器人报伺服故障,故障代码为SERVO-062。
对此故障代码进行复位:按MENUS→SYSTEM→F1,[TYPE]→找master/cal→F3,RES_PCA→F4,YES后,机器人仍然报伺服故障。
故障代码SERVO-062的解释为SERVOBZALalarm(Group:%dAxis:%d),故障可能原因:①机器人编码器上数据存储的电池无电或者已经损坏。
编码器脉冲数据存储为4节普通1.5V 的1号干电池,测量每节电池电压,均<1.4V,电压明显偏低,于是更换新电池,再次对故障进行复位,仍然报SERVO-062故障。
②控制器内伺服放大器控制板坏。
测量伺服放大器LED“D7”上方的2个DC链路电压检测螺丝,如果DC链路电压>50V,可判断伺服放大器控制板异常。
实测发现DC链路电压<50V,所以初步判断伺服放大器控制板处于正常状态。
观察伺服放大器控制板上P5V、P3.3V、SVEMG、OPEN的LED颜色,确认电源电压输出正常,没有外部紧急停止信号输入,与机器人主板通信也正常,排除伺服放大器控制板损坏。
③线路损坏。
对机器人控制器与机器人本体的外部连线电缆RM1、RP1进行检查,RM1为机器人伺服电机电源、抱闸控制线,RP1为机器人伺服电机编码器信号以及控制电源、末端执行器、编码器上数据存储的电池等线路。
拔掉插头RP1,测量端子5、6、18控制电源电压+5V、+24V均正常。
再检查编码器上数据存储的电池线路,而机器人每个轴的伺服电机脉冲编码器控制端由1~10个端子组成,端子8、9、10为+5V电源,4、7为数据保持电池电源,5、6为反馈信号,3为接地,1、2空。
先拔掉M1电机的脉冲控制插头M1P,测量端子4、7电压为0,同样的方法检查M2~M7电机全部为0,由此可以判断编码器上数据存储的电池线路损坏。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
常用故障代码和故障排除方法
伺服-001 操作面板紧急停止
SRVO-001 Operator panel E-stop
[现象]按下了操作箱/操作面板的紧急停止按扭。
SYST-067 面板 HSSB 断线报警同时发生,或者配电盘上的 LED(绿色)熄灭时,主板( JRS11)-配电盘( JRS11)之间的通信有异常,可能是因为电缆不良、配电盘不良、或主板不良。
( 注释 )
[对策 1]解除操作箱/操作面板的紧急停止按扭。
[对策 2]确认面板开关板( CRM51 )和紧急停止按扭之间的电缆是否断线,如果断线,则更换电缆。
[对策 3]如果在紧急停止解除状态下触点没有接好,则是紧急停止按扭的故障。
逐一更换开关单元或操作面板。
[对策 4]更换配电盘。
[对策 5]更换连接配电盘(JRS11)和主板( JRS11)的电缆。
在采取对策 6 之前,完成控制单元的所有程序和设定内容的备份。
[对策 6]更换配电盘。
(注释) SYST-067 面板 HSSB 断线报警同时发生,或 RDY LED熄灭时,有时会导致下面的报警等同时发生。
(参阅示教操作盘的报警历史画面)
伺服 -001操作面板紧急停止
伺服 -004栅栏打开
サーボ -007外部紧急停止
伺服 -204外部( SVEMG 异常)紧急停止
伺服 -213保险丝熔断(面板 PCB)
伺服 -280SVOFF 输入
伺服-002 示教操作盘紧急停止
SRVO-002 Teach pendant E-stop
[现象]按下了示教操作盘的紧急停止按扭。
[对策 1]解除示教操作盘的紧急停止按扭。
[对策 2]更换示教操作盘。
伺服-003 紧急时自动停机开关
SRVO-003 Deadman switch released
[现象]在示教操作盘有效的状态下,尚未按下紧急时自动停机开关。
[对策 1]按下紧急时自动停机开关并使机器人操作。
[对策 2]更换示教操作盘。
伺服-021 SRDY 断开(组: i 轴: j )
SRVO-021 SRDY off (Group:i Axis:j)
[现象]当 HRDY 断开时,虽然没有其他发生报警的原因, SRDY 处在断开状态。
(所谓HRDY ,就是主机相对于伺服发出接通还是断开伺服放大器的电磁接触器的信号。
SRDY 是伺服相对于主机发出伺服放大器是否已经停止的信号。
虽然试图停止伺服放大器的电磁接触器但电磁接触器不停止,通常是由于伺服放大器发出报警,如果检测出伺服放大器的报警,主机端就不会发出此报警(SRDY 断开)。
也即,此报警表示虽然找不出原因但电磁接触器不停止的情况。
)
[对策 1]确认紧急停止单元 CP2、 CRM64 、 CNMC3 、伺服放大器CRM64 已经切实连接。
[对策 2]存在着电源瞬时断开的可能性。
确认是否存在电源的瞬时断开。
[对策 3]更换紧急停止单元。
[对策 4]更换伺服放大器。
伺服-037IMSTP 输入(组: i )
SRVO-037IMSTP input (Group:i)
[现象]输入了外围设备 I/O 的 *IMSTP 信号。
[对策]接通 *IMSTP 信号。
伺服-038脉冲计数不匹配(组: i 轴: j )
SRVO-038Pulse mismatch (Group:i Axis:j)
[现象]电源断开时的脉冲计数和电源接通时的脉冲计数不同。
在更换脉冲编码器之后
或者在更换脉冲编码器的备份用电池之后发出此报警。
此外,在将备份用数据读到主板中时发出此报警。
确认报警历史画面,按照下面的不同情形进行检查。
[对策 1]在与“伺服-222没有放大器”同时发生时,参阅伺服-222的项目。
[对策 2]对不带制动器的电机设定了带有制动器时,有时会发生此报警。
确认附加轴的设定是否正确。
[对策 3]在电源断开中通过制动器解除单元改变姿势时,或者退回主板的备份数据时,会发
生此报警,应重新执行该轴的控制。
[对策 4]在电源断开中由于制动器的故障而改变姿势时,发生此报警。
在消除导致报警的原
因后,重新执行该轴的控制。
[对策 5]在更换脉冲编码器后,重新进行该轴的控制。
伺服SRVO -
-
050 CLALM 报警(组: i轴:j)
050 CLALM alarm (Group:i Axis:j)
[现象]在伺服放大器内部推测的扰动扭矩变得异常大。
检测出刀具冲突。
)
[对策 1]确认机器人是否冲突,或者确认是否存在导致该轴的机械性负载增大的原因。
[对策 2]确认负载设定是否正确。
[对策 3]确认该轴的制动器是否已经开启。
[对策 4]当负载重量超过额定值时,应在额定值范围内使用。
[对策 5]确认控制装置的输入电压是否处在额定电压内,并确认控制装置的变压器的电压设定是否正确。
[对策 6]更换6轴放大器。
[对策 7]更换该轴的电机。
[对策 8]更换紧急停止单元。
[对策 9]更换该轴的电机动力线(机器人连接电缆)。
[对策 10]更换该轴的电机动力线、制动器线(机构部内部)。
伺服SRVO -
-
062 BZAL报警(组:i轴:j)
062 BZAL alarm (Group:i Axis:j)
[现象]尚未连接脉冲编码器的绝对位置备份用电池时发生此报警。
可能是因为机器人内部的电池电缆断线造成的。
[对策]在消除报警的原因后,将系统变量($MCR.$SPC RESET)设为 TRUE,然后再接通电源。
需要进行控制。
伺服-230链条 1 (+24V) 异常
SRVO -230Chain 1 (+24V) Abnormal
伺服-231链条 2 (0V) 异常
SRVO -231Chain 2 (0V) Abnormal
[现象]链条 1(+24V)/ 链条 2(0V) 异常在操作箱/操作面板的紧急停止、示教操作盘的紧急停止、紧急时自动停机开关、栅栏开关、外部紧急停止、伺服ON/OFF开关、门开关中的其中一处发生。
应以后面所示的方法确认报警历史。
·单链异常是在一侧的链条处在紧急停止状态而另一侧的链条没有处在紧急停止状态下发生
的。
·发生报警的原因可能在于,触点的熔敷、紧急时自动停机开关不到位的开启、紧急停止开
关只被按到一半、外部紧急停止等规定外的输入等。
在检测出单链异常时,应排除报警的原因,并根据后面所示的方法解除报警。
在确认报警历史之前,应保持报警的状态。
[对策 1]更换配电盘。
[对策 2]更换紧急停止单元。
[对策 3]更换伺服放大器。
[对策 4]更换连接着配电盘~紧急停止单元(CRM64)、紧急停止单元~伺服放大器(CRM67)的电缆。
注释 )在上述作业中排除硬件的链条异常原因后,在系统设定画面上将链条异常的复位的
执行设为“ Yes”(是)。
最后,按下示教操作盘上的复位键。
详情请参阅后面所载的“解
除链条异常”页上的内容。