MOD动作分析法
IE动作分析-MOD法培训资料-文档资料

▪ 1MOD=0.129s ▪ 1MOD=0.1s ▪ 1MOD=0.143s ▪ 1MOD=0.12s
正常值。能量消耗最小动作 高效值。熟练工人的高水平动作时间值 包括疲劳恢复时间的10.7%在内的动作时间 快速值,比正常值快7%左右
© Siemens VDO Automotive Huizhou 2009 | PED-IE
10
补充符号
名称
延时
符号
内
容
BD
另一只手动作时,这只手处于停止的状态,不给予时间
持住
H
有效时间
UT
用手拿着或抓着物体一直不动的状态,主要指扶持与固定的动作, 不给时间
指人的动作以外,机械或其他工艺要求发生的,非动作产生的固 有附加时间,需要准确测时。
© Siemens VDO Automotive Huizhou 2009 | PED-IE
MODAPTS
21种 8个
MTM
37种 31个
WF
139种
© Siemens VDO Automotive Huizhou 2009 | PED-IE
2009-7-15
6
模特法MODAPTS
1) 把手指的动弹作为一个单位,其他动作是以手指动作的整数倍来表示。 2) 把使用的身体部位用21个记号来分类。 3) 时间单位以MOD表示。
G0,G1,G3 P0,P2,P5
© Siemens VDO Automotive Huizhou 2009 | PED-IE
2009-7-15
20
G0
触及 G0
▪ 用手指或手去接触目的物的动作。这个动作没有要抓住目的物的意图, 只是触及而已。它是瞬间发生的动作,所以没有动作时间。
工业工程动作分析之mod法

对MOD法的改进建议
01
引入人工智能技术
利用人工智能技术进行自动化评 估和计算,减少人为因素对评估 结果的影响。
02
拓展适用范围
03
持续优化经验公式
研究如何将MOD法应用于更广 泛的工业工程领域,提高其适用 性和普适性。
根据实际应用反馈,不断优化 MOD法的经验公式,提高其精 度和可靠性。
05
案例分析
MOD法经过多年的发展和改进,形成了许多不同的版本和变体,
03
但其核心思想和方法仍然保持一致。
MOD法的基本原则
01
分解原则
将复杂的动作序列分解为简单的操 作单元,便于分析和优化。
优化原则
不断优化操作单元和流程,消除浪 费和瓶颈,提高生产效率。
03
02
标准化原则
通过标准化操作单元和流程,提高 生产效率和产品质量。
分析历史生产数据和市场预测,制定 更为合理的生产计划和目标。
运用MOD法对生产排程进行优化,合 理安排作业顺序和资源配置。
通过实时监控和调整生产计划与排程, 确保生产过程的顺利进行,提高生产 效率和资源利用率。
谢谢观看
预测生产能力
通过MOD法分析生产线的生产能力,预测未来一段时间内的生产 能力和负荷情况,为生产计划和排程提供依据。
04
MOD法的优势与局限性
MOD法的优势
简单易行
MOD法是一种简单易行的 动作分析方法,适用于各 种工业工程领域,便于初 学者快速掌握。
全面性
MOD法能够全面分析作业 过程中涉及的所有动作要 素,包括基本动作、辅助 动作和无效动作。
MOD法通过将每个动作分解为最小的 操作单元,并评估每个操作单元所需 的时间和人力,来识别生产过程中的 瓶颈和浪费。
IE动作分析-MOD法培训资料
IE动作分析-MOD法培训资料1. 介绍1.1 关于IE动作分析-MOD法IE动作分析-MOD法(Initial Efficiency Motion Analysis)是一种用于提高工作效率的方法。
它通过观察和分析个体在进行各种动作的过程中的动作路径和动作时间,并在此基础上进行改进,以达到更高的效率和质量。
MOD法在很多工业领域和生产线上被广泛应用,可以有效地提高生产效率,降低工作负荷,减少误差。
1.2 MOD法培训的目的MOD法培训的目的是使学员能够掌握IE动作分析-MOD法的基本概念和技巧,能够通过对动作的分析和改进,提高工作效率和质量。
本资料将介绍MOD法的基本原理、实施步骤和案例分析,并提供实际操作的指导,帮助学员理解和运用MOD法。
2. MOD法的基本原理和步骤2.1 基本原理MOD法基于一种假设,即动作路径和时间的变化可以影响动作效率和质量。
通过观察和测量动作的路径和时间,可以找到改进的潜力,并通过优化路径和时间来提高效率和质量。
2.2 实施步骤MOD法的实施步骤包括以下几个关键阶段:2.2.1 分析目标和确定动作在这一阶段,需要明确分析的目标和确定要分析的动作。
一个明确的目标可以帮助聚焦分析,而确定要分析的动作则是分析的基础。
2.2.2 观察和记录动作在这一阶段,需要仔细观察所选动作的执行过程,并记录下每个关键节点的位置和所花费的时间。
这可以通过视频记录或移动传感器等工具来完成。
2.2.3 分析动作路径和时间在这一阶段,需要对观察记录的数据进行分析,主要包括动作路径和动作时间的统计和分析。
可以用图表的形式展示路径和时间的分布情况,以发现规律和潜在问题。
2.2.4 提出改进措施在这一阶段,根据分析的结果,提出改进措施,包括路径优化、时间压缩和动作节奏的改善等。
这些改进措施应该与目标一致,同时考虑实施的可行性。
2.2.5 实施和评估改进措施在这一阶段,将改进措施付诸实施,并对实施结果进行评估。
精选IE动作分析MOD法培训资料lmc

UT
指人的动作以外,机械或其他工艺要求发生的,非动作产生的固有附加时间,需要准确测时。
© Siemens VDO Automotive Huizhou 2009 | PED-IE
2009-7-15
MODAPTS 动作分析
移动动作
M1,M2,M3( ),M4,M5
© Siemens VDO Automotive Huizhou 2009 | PED-IE
M 1
2.5cm
© Siemens VDO Automotive Huizhou 2009 | PED-IE
2009-7-15
手腕的动作 M2
用腕关节以前的部分进行一次的动作,时间值是2MOD,动作距离为5cm。依靠手腕的动作不仅能够做横向运动,也可以做上下、左右、斜向和圆弧状的动作。根据M2的动作方式,伴随手的动作,小臂多少也要动作,但主要动作是辅助动作。转动调谐旋钮;将电阻插在电路板上;转动门轴;翻笔记本。
© Siemens VDO Automotive Huizhou 2009 | PED-IE
2009-7-15
触及 G0
用手指或手去接触目的物的动作。这个动作没有要抓住目的物的意图,只是触及而已。它是瞬间发生的动作,所以没有动作时间。
左手
记号
右手
记号
MOD数
什么都不做
BD
伸手接触键
M3G0
3
什么都不做
139种
不同的时间值数字个数
8个
31个
© Siemens VDO Automotive Huizhou 2009 | PED-IE
2009-7-15
1) 把手指的动弹作为一个单位,其他动作是以手指动作的整数倍来表示。2) 把使用的身体部位用21个记号来分类。3) 时间单位以MOD表示。 *1 MOD = 0.129秒 = 0.00215分(经济速度时)4) 记号和时间值是一致的。5) 使用很容易使用的基本图。6) 因为是数字式的记号,也可以用汉字来表示。7) 时间分析时只需要分析用纸。8) 使用程度高。9) 易活用于作业改善活动。10) 和最初时间值同样的数字表示。11) 动作分析及ST的算出简单。
工业工程动作分析之MOD法

模特法动作分析---其它动作
下肢和腰的动作 (2) 步行动作W5 运动膝关节,使身体移动或回转身体的动作。包括向前、向后、向横 侧,凡属用脚支配身体的水平移动的动作,时间值为5MOD
模特法动作分析---其它动作
下肢和腰的动作 (3) 身体弯曲动作B17 从站立的状态到弯曲身体,蹲下,单膝触地,然后再返回原来的状态 的整个过程,时间值为17MOD
工业工程动作分析
-MOD法
IE组:王滨
日期:2017年6月8日
目录
1、模特法的基本原理
内 容 概 要
2、模特法的特点 3、模特法的动作分类 4、模特法的动作分析 5、动作改进
模特法基本原理
模特排时法简称模特法或MOD法,MOD法是以操作时的身体部位为基 础1MOD=0.129s
5cm
举例:将元件插在电路板上。
模特法动作分析---移动动作
(3) 小臂的动作 M3
肘关节以前的 (包括手、手指)的动作,时间值为3MOD,移动距离为
15cm
举例:左手取未加工镜片
模特法动作分析---移动动作
(4)大臂的动作 M4
伴随肘的移动,小臂和大臂做为一个整体,在自然状态下伸出的动作,
是需要注意力的动作,时间值为2MOD
ቤተ መጻሕፍቲ ባይዱ
举例:将未加工镜片放入机台加工
模特法动作分析---终结动作
(6) 放置动作P5
将物体准确地放在所规定的位置或进行配合的动作,它是比P2更复杂
的动作。P5需要伴有2次以上的修正动作,自始至终需要用眼睛观察, 动作中产生犹豫,是需要注意力的动作,时间值为5MOD
(1)所有人力操作时的动作均包括一些基本动作。模特法把生产实际
MOD法分析规范标准时间
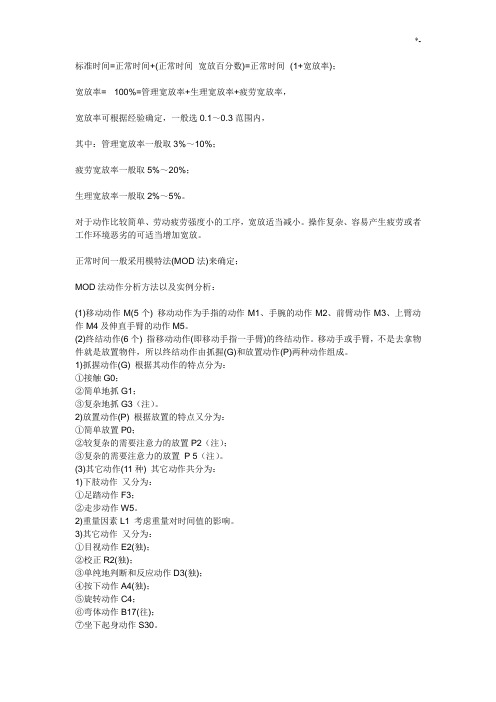
标准时间=正常时间+(正常时间×宽放百分数)=正常时间×(1+宽放率);宽放率= ×100%=管理宽放率+生理宽放率+疲劳宽放率,宽放率可根据经验确定,一般选0.1~0.3范围内,其中:管理宽放率一般取3%~10%;疲劳宽放率一般取5%~20%;生理宽放率一般取2%~5%。
对于动作比较简单、劳动疲劳强度小的工序,宽放适当减小。
操作复杂、容易产生疲劳或者工作环境恶劣的可适当增加宽放。
正常时间一般采用模特法(MOD法)来确定;MOD法动作分析方法以及实例分析:(1)移动动作M(5个) 移动动作为手指的动作M1、手腕的动作M2、前臂动作M3、上臂动作M4及伸直手臂的动作M5。
(2)终结动作(6个) 指移动动作(即移动手指一手臂)的终结动作。
移动手或手臂,不是去拿物件就是放置物件,所以终结动作由抓握(G)和放置动作(P)两种动作组成。
1)抓握动作(G) 根据其动作的特点分为:①接触G0;②简单地抓G1;③复杂地抓G3(注)。
2)放置动作(P) 根据放置的特点又分为:①简单放置P0;②较复杂的需要注意力的放置P2(注);③复杂的需要注意力的放置P 5(注)。
(3)其它动作(11种) 其它动作共分为:1)下肢动作又分为:①足踏动作F3;②走步动作W5。
2)重量因素L1 考虑重量对时间值的影响。
3)其它动作又分为:①目视动作E2(独);②校正R2(独);③单纯地判断和反应动作D3(独);④按下动作A4(独);⑤旋转动作C4;⑥弯体动作B17(往);⑦坐下起身动作S30。
4.模特法的动作分析(1)基本动作——上肢动作1)移动动作(M) 移动动作包括5种,分别以手指、手和手臂进行作业来区分。
①手指动作M1 表示用手指的第三个关节前的部分进行的动作,每动作一次时间值为1MOD,相当于手指移动了2.5cm的距离。
②手的动作M2 用腕关节以前的部分进行的动作,当然也包括了手指的动作,每进行一次为2MOD,相当于动作距离为5cm左右。
modapts动作分析法ppt课件

2-3-1. 任何人可容易算出并且实用性高, 并且,简单易懂,不需要高深的专门技术. 2-3-2. 适用范围广; 不仅适用于制造部门, 也常用于生产技术, 商品设计, 生产管理, 服务等领域. 2-3-3. 在制造部门, 常用于改善; 2-3-4. 培训期短, 培训回报快
其时间值为 3 MOD .
动作例子 在操作台组立 一次组立(如, MF + LGP / 贴DS等 )
返修
正常作业范围的重要性
M 3 , 即, 以肘关节为中心可自由动作的作业领域, 叫做 正常作业范围 . 因此, 将作业领域 尽量变小, 变窄 ; 相对性的更易于将效率 最大化
4-1-4. 上臂动作
M 4 ( 约 30Cm 距离的动作 )
模架 挡光
吸
塑
夹具
盘
A58 一次组立 ;
员工操作台前摆放有, 夹具 / 模架 / 挡光 / 吸塑盘
组立操作方法;
-将模架放置在夹具上, -将挡光取来并对贴到模架上 -组立好的产品放置到吸塑盘上.
A58 一次组立动作拆分
1 MOD
0.143S
疲劳度 115%
NO.
动作拆分
目的
单元代码 (CODE)
MOD SEC.
M5 移动动作
抓,放动作
附属动作 (仅) A4 C4 B 17 S 30
4
2-6. MODAPTS CODE(单元代码) 基本图
M1
M2
M3
M4
Get
Get
G0
G1
Get
G3
P 0
P 2
Put
Put
L1
R2
Mod法21个动作单元分析
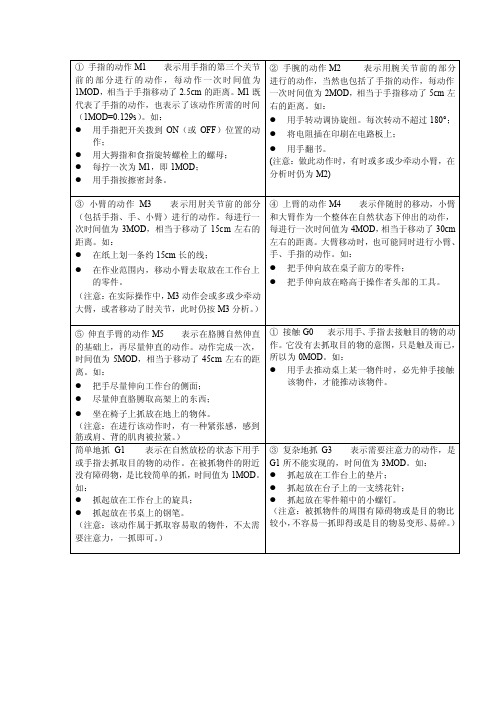
作; 用大拇指和食指旋转螺栓上的螺母; 每拧一次为 M1,即 1MOD; 用手指按擦密封条。
在纸上划一条约 15cm 长的线;
手、手指的动作。如:
在作业范围内,移动小臂去取放在工作台上 把手伸向放在桌子前方的零件;
的零件。
把手伸向放在略高于操作者头部的工具。
(注意:在实际操作中,M3 动作会或多或少牵动
大臂,或者移动了肘关节,此时仍按 M3 分析。)
⑤ 伸直手臂的动作 M5 表示在胳膊自然伸直 的基础上,再尽量伸直的动 作。动作完成一次, 时间值为 5MOD,相当于移动了 45cm 左右的距 离。如:
②步行动作 W5 表示运动膝关节,使身体移动 或回转身体的动作。包括向 前、向后、向横侧, 凡属用脚支配身体的水平移 动动作均属此动作, 每进行一次的时间值为 5MOD。如: 在 F3 脚踏动作中如果脚跟离开踏板
①脚踏动作 F3 表示将脚跟踏在踏板上,并 且脚跟不离踏板作足颈动作,其时间值为 3MOD。 如:
② 手腕的动作 M2
表 示 用腕 关 节 前 的 部 分
进行的动作,当然也包括了 手指的动作,每动作
一次时间值为 2MOD,相当于手指移动了 5cm 左 右的距离。如:
用手转动调协旋纽。每次转动不超过 180°;
将电阻插在印刷在电路板上;
用手翻书。 (注意:做此动作时,有时或多或少牵动小臂,在 分析时仍为 M2)
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
M1 M2 M3 M4 M5
G0 G1 G3 P0 P2 P5
移动动作和终结动作综合
轴和套的装配 把轴套放在A点上,为M3P5。 到B点时为少量插入轴中。从B 点到C点,要加算必要的移动动 作M2P0(或M3P0)。
若在B点放开手,套依靠自重自 然落下,则不需加算移动动作。
移动动作和终结动作综合
– – – – 将拿着的旋具放到桌子旁 将传送带送来的零件放在自己面前 将用完的辅助支架放到传送带上 将要检查的零件抓起,堆放在面前
左手 放上左侧传送带
记号
右手
记号 --
MOD数 3
M3P0 什么都不做
放在手前的桌上
M3P0 把烙铁移到手前 M3P0
3
需要注意力的放置 P2
P 2 (注意)
– 往目的地放东西的动作,并需要用眼睛盯着看 进行一次修正的动作。其时间值为2MOD。 – P2动作适用于能够大体上确定物体位置或指定 位置,虽有配合公差但配合不严的场合。
实例分析1
• 坐在椅子上的操作者,用右手抓收音机盒, 放在传送带指定位置上。
No 左手动作 右手动作 标记符号 次数 MOD
1
2 3
----
抓盒的拉手M3G1
放到传送带指定位 置M4P2 重量修正
M3G1
M4P2 L1
4
6 1
实例分析2
• 站着的工人把放在桌上的14寸彩电抱起, 用身体支撑住,放到传送带的指定位置上。
两手均需注意力时的分析方法
• 在桌上放置零件A和B,两手分别抓两个零件。
左手先动作:
No 1 左手动作 抓零件A M3G3 右手动作 抓零件B M4G3 标记符号 M3G3M2G3 次数 MOD 11
右手先动作:
No
1
左手动作
抓零件A M3G3
右手动作
抓零件B M4G3
标记符号
M4G3M2G3
次数
2.5cm M1
手腕的动作 M2
– 用腕关节以前的部分进行一次的动作,时间值 是2MOD,动作距离为5cm。 – 依靠手腕的动作不仅能够做横向运动,也可以 做上下、左右、斜向和圆弧状的动作。根据M2 的动作方式,伴随手的动作,小臂多少也要动 作,但主要动作是辅助动作。 – 转动调谐旋钮;将电阻插在电路板上;转动门 轴;翻笔记本。
时限动作的时间值
• 两手可以同时动作时,时间值大的动作叫 时限动作; • 要用时限动作的时间值来表示两手同时动 作时间值。
No 左手动作 右手动作 1 抓零件 抓螺丝刀 (M3G1) M4G1 标记符号 次数 MOD 5
M4G1
被时限动作标记时加()表示,它不影响分析结果。
两手均需注意力时的分析方法
手指的动作 M1
– 表示用手指的第3个关节前的部分进行的动 作,时间值为1MOD,移动距离为2.5cm。 – 把开关拨到on(off)的位置;回转小旋钮;弹 钢琴;用手指拧螺母;用手指擦密封条。 – 手指动作M1表示手指的一次动作。对于用 手指将开关拨到on(off)或用手指旋转螺母时, 要观察手指进行了几次动作。
• 我们后面所记录的动作量都是以MOD为单位 • 1MOD=0.143秒=0.00238分钟
MOD基本体系和类别
移动动作
移 动 动 反射性动作 作
移动动作
5cm 2.5cm M1 M2
15cm
30cm
45cm M5
M3
M4
手的基 本动作
边看边抓 的动作
终
G0
G1
结
动
需要注 意力的 动作
G 3 (注意)
–抓起单独放置的工具; –抓起放在桌上的笔; –两手同时伸出捧住电视机; –抓取排成一行的印章
左手 什么都不做 记号 -右手 伸手抓工具 记号 M3G1 MOD数 4
复杂抓取 G3
G 3 (注意)
– 需要注意力,用G1所不能完成的,时间值为3MOD;
– 在抓取目的物时有迟疑现象,或是目的物周围有障 碍物;或是目的物比较小,不容易一抓就得;或是 目的物易变形、易碎; – 只是简单的手指闭合是不能抓住的。
弯腰动作B17
B 17
– 从站立状态到弯曲身体,蹲下,单膝触地,然 后再返回原来的状态的整个过程。
– 屈身、弯腰是以腰部为支点,向前弯伏,使手 的位置在膝下面的动作; – B17动作之后,手(或臂)的移动动作用M2表 示。 B 17
坐下再站起S30
S 30
• 坐在椅子上,再站起来的一个周期动作;
– 若脚离开地面,再踏脚踏板开关的动作,应判 断为W5.
步行动作W5
– – – –
W5
走步使身体移动的动作; 回转身体同时挪动脚步,也判定为步行动作; 步行时每一步用W5表示,时间值为5MOD; 步行到最后一步,手和臂随之移动的动作为M2;这是 因为最后一步动作中,手离目的物也近了。
– 站立的操作者,沿着桌子抓物体时,可能随伸手的动 作而一只脚要向前移动一步(或者退回),这是为了 保持身体的平衡而加的辅助动作。这种动作应判定为 手的移动动作,不用判定为W5
左手
记号
右手
记号
MOD数
什么都不做
什么都不做 什么都不做 什么都不做
-----
伸手接触键
推 按 键 键 接触下一键
M3G0
M1G0 M2G0 M1G0
3
1 2 1
简单抓取 G1
G1
– 用手指、手简单地抓地动作。时间值为1MOD。 – 在自然放松条件下用手或手指抓取物件的动作,没有 一点踌躇现象,在被抓物件的附近也没有障碍物;
30cm M4
大臂尽量伸直的动作 M5
– 在胳膊自然伸直的基础上,再尽量伸直的动作。另外, 将整个胳膊从自己的身体正面向相反的侧面伸出的动 作也用M5表示。其时间值为5MOD,移动距离一般为 45cm。 – 连续做M5的动作应尽量减少。 – 尽量伸直胳膊取高架上的东西;把手尽量伸向桌子的 侧面;坐在椅子上抓放在地上的物体;从自己身体的 正面交叉,向相反方向尽量伸手。
15cm
M3
大臂的动作 M4
– 伴随肘的移动,小臂和大臂做为一个整体,在 自然状态下伸出的动作。其时间值为4MOD, 移动距离一般为30cm。 – 当手臂充分伸展时,伴有身体前倾的辅助动作, 从时间值上看,仍是M4。 – 把手伸向放在桌子前方的零件;把左手伸向放 在桌子左端的工具;把手伸向放在略高于操作 者头部的工具。
两手同时动作条件
1、两手的终结动作均不需要注意力时,可以同时动作; 2、只有一只手的终结动作需要注意力时,可以同时动作;动作 另一手的终结动作 同时动作 1 G0 P0 G1 G0 P0 G1 可能 2 G0 P0 G1 P2 G3 P5 可能 3 P2 G3 P5 P2 G3 P5 不可能
空闲 -- 把螺丝刀拿到机壳上 空闲 -- 把刀头放到螺钉头槽内 空闲 -- 旋转3次螺钉
M3G1
M3P0 M2P5 (M1G0M1P0)X3
4
3 7 6
空闲 -- 把螺丝刀放回原处
M3P0
3
同时动作
• 用身体的不同部位,同时进行一样或不一 样的两个以上动作; • 一般以双手的同时动作为佳; • 可以排除一只手闲的情况; • 可以提高工作效率。
现 场 的 动 作
终结动作 放的动作
作
P0
腿的基 本动作
其它动作
不需要 注意力 的动作
E2 D3
(独 )
2-6Kg
P 2 (注意)
P 5 (注意)
其 他 动
L1
(独 )
Yes
A4
(独 )
W5
No
其它的 基本动 作
R2
F3
C 4 (独 )
B 17
S 30
作
MOD动作分析 移动动作
M1,M2,M3, M4,M5
• 两手同时向目的场所移动,终了的瞬间,若某只 手开始了终结动作,另一只手就要在目的物附近 稍微等待到第一只手动作完后,再稍微移动M2, 才能完成其终结动作。
P5 P2 终结动作G3 P5 P2 终结动作G3
8 9 10 11
左手
移动动作M3
移动动作 移动动作M3 在目的物旁等待 M2 右手
1 2 3 4 5 6 7
– – – – – 将垫圈套在螺栓上; 向轴上涂油; 把烙铁放在烙铁架上; 将作业完了的零件放在传送带的指定位置 用笔尖触及写字的位置
需要注意力的放置 P5
P 5 (注意)
– 将物体正确地放在所规定地位置或进行配合的 动作; – 比P2更复杂,常需要伴有两次以上的修正动作; – 自始至终需要用眼睛观察;动作中产生犹豫;
MOD动作分析
MOD说明:
将工作中的人视为一个模特,将身体部位表现出的每个动作都 以MOD数的标准来总结、归类、记录!并将记录按一定的时 间比来计算后,换算成一个标准时间! (MOD是一种工作中作业动作的记录方法)
MOD的时间值:
根据身体部位表现出动作时间的差异,它分为移动动作、终 结动作、其他动作,是以多个动作和于动作相对应的时间值 构成。
MOD动作分析 终结动作
G0,G1,G3 P0,P2,P5
触及 G0
G0
– 用手指或手去接触目的物的动作。这个动作没有要抓 住目的物的意图,只是触及而已。它是瞬间发生的动 作,所以没有动作时间。
–碰推键; –用手指接触垫圈; –碰放在桌上的橡皮; –推放在桌面上的纸张; –用两手推卡片的左、右侧面;
• 站起来时两手将椅子向后推和坐下时把椅 子向前拉的动作时间也包括在内。
S 30
辅助动作
L1,E2,R2,D3,A4,C4
搬运动作的重量因素L1
L1
2-6Kg
– 搬运重物时,物体的重量影响动作的速度,且 随物体的轻重而影响时间值;