往返高差平差表
南方平差易水准网平差实例.
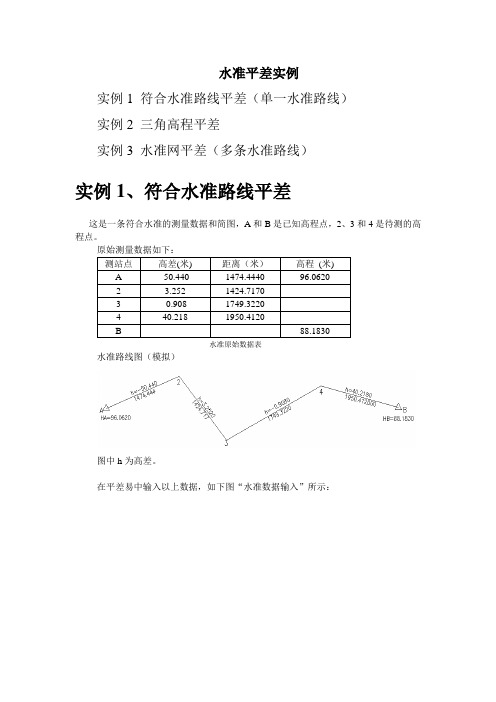
水准平差实例实例1 符合水准路线平差(单一水准路线)实例2 三角高程平差实例3 水准网平差(多条水准路线)实例1、符合水准路线平差这是一条符合水准的测量数据和简图,A和B是已知高程点,2、3和4是待测的高程点。
测站点高差(米) 距离(米)高程(米)A -50.440 1474.4440 96.06202 3.252 1424.71703 -0.908 1749.32204 40.218 1950.4120B 88.1830水准原始数据表水准路线图(模拟)图中h为高差。
在平差易中输入以上数据,如下图“水准数据输入”所示:水准数据输入在测站信息区中输入A、B、2、3和4号测站点,其中A、B为已知高程点,其属性为01,其高程如“水准原始数据表”;2、3、4点为待测高程点,其属性为00,其它信息为空。
因为没有平面坐标数据,故在平差易软件中没有网图显示。
根据控制网的类型选择数据输入格式,此控制网为水准网,选择水准格式,如下图“选择格式”所示:选择格式注意:1、在“计算方案”中要选择“一般水准”,而不是“三角高程”。
“一般水准”所需要输入的观测数据为:观测边长和高差。
“三角高程”所需要输入的观测数据为:观测边长、垂直角、站标高、仪器高。
2、在一般水准的观测数据中输入了测段高差就必须要输入相对应的观测边长,否则平差计算时该测段的权为零,因此导致计算结果错误。
在观测信息区中输入每一组水准观测数据测段A点至2号点的观测数据输入(观测边长为平距)如下图“A->2观测数据”所示:A->2观测数据测段2号点至3号点的观测数据输入如下图“2->3观测数据”所示:2->3观测数据测段3号点至4号点的观测数据输入如下图“3->4观测数据”所示:3->4观测数据测段4号点至B点的观测数据输入如下图“4->B观测数据”所示:4->B观测数据以上数据输入完后,点击菜单“文件\另存为”,将输入的数据保存为平差易数据格式文件(格式内容详见附录A):[STATION]A,01,,,96.062000B,01,,,88.1830002,003,004,00[OBSER]A,2,,1474.444000,-50.44002,3,,1424.717000,3.25203,4,,1749.322000,-0.90804,B,,1950.412000,40.2180平差计算选择菜单“平差->闭合差计算”,计算该水准路线的高差闭合差。
建筑工程测量中高差闭合差的计算与调整

建筑工程测量中高差闭合差的计算与调整0 前言在建筑工程测量中,当待测点距已知点较远时,必须进行高程控制测量。
高程测量的方法有多种,其中水准测量是精确测量地面点高程的主要方法,在实际工作中应用十分广泛。
沿线布设临时水准点,从已知点出发,沿闭合路线、附合路线、支路线等三种路线进行水准测量,三种水准路线的区别见表1。
由于支水准路线缺乏检核条件,规定在支水准路线中必须进行往返测量。
这样,在三种水准路线中,终点都是已知点。
表1 水准路线的区别水准路线 起点 终点 起点与终点的位置 备注 闭合水准路线 BM1 BM1 相同 环线 附合水准路线 BM1 BM2 不相同支水准路线 BM1BM1相同沿原路线返回。
如:BM1→1→2→3→4→3→2→1→BM1由于仪器(工具)误差、观测误差、外界条件的影响等测量误差的存在,在水准测量中不可避免地会出现测量误差。
当待测点距已知点较远时,经过多测站的观测后,在待测点上必然积累了一定的误差,这些误差的多少只有通过多余观测才可得知。
多余观测在这里体现为对终点进行观测。
用终点的实测高程与终点的理论高程去进行比较,从而得知产生了多少误差,这个误差就是高差闭合差。
对水准测量的成果进行检核,当测量误差在容许范围之内就必须对产生的测量误差,即高差闭合差进行调整,这就是控制测量中的平差。
1 高差闭合差的计算 在相关书目[1]中,高差闭合差可以定义为:在控制测量中,实测高差的总和与理论高差的总和之间的差值,表示为∑∑-=理测h h f h 。
在外业时,可用该公式检验外业的质量,判断是否结束外业。
三种水准路线计算高差闭合差所用的公式如下:闭合水准路线、支水准路线:∑∑-=ba f h ;附合水准路线:∑∑-=ba f h -(H 终-H 始)。
以上公式比较抽象,若使高差闭合差这一概念具体化,必须从高差的概念入手,对公式进一步推导:()()终理终测始终理始终测理测H H H H H H h h f h -=---=-=∑∑从公式可以看出,高差闭合差就是终点的实测高程与终点的理论高程的差值。
高程控制网平差

i
i
i
h h V 改厕厕短的改正数, 代入上式,得:
i
i
i
V1 V2 V3 V4 W 0
W H A h1 h2 h3 h4 H B
1.附合水准路线的条件数和条件方程式组成
观测值5个,待定水准点2 个,所以条件有3个,可 以列出3个条件方程:
h1
H B h1 h2 H A 0
V 1 V 3 V 2 W a 0 V 2 V 4 V 6 W b 0 V 4 V 5 V 3 W c 0
(二)观测值权的确定:
1.各水准路线都进行了往返观测,每公里水准路线的观测中误差为 ,
则m:i
R mi2
1 4n
n i
2 i
i
式中,为测往返测高程不符值,以mm为单位;R为测段长度,以km为单位;n
H A h2 h3 h5 H D 0
H B h1 h3 h4 H C 0
一般以1个已知点为起点,其它已知点为终点,所构成的附合 水准路线为已知点数减1,这样可以列出的条件方程式为已知 水准点个数减1.
2.闭合水准路线的条件数和条件方程式的组成
从一个水准点出发,经过若干水准测段,又回到该 水准点,这样的水准路线称为闭合水准路线。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
吴淞高程
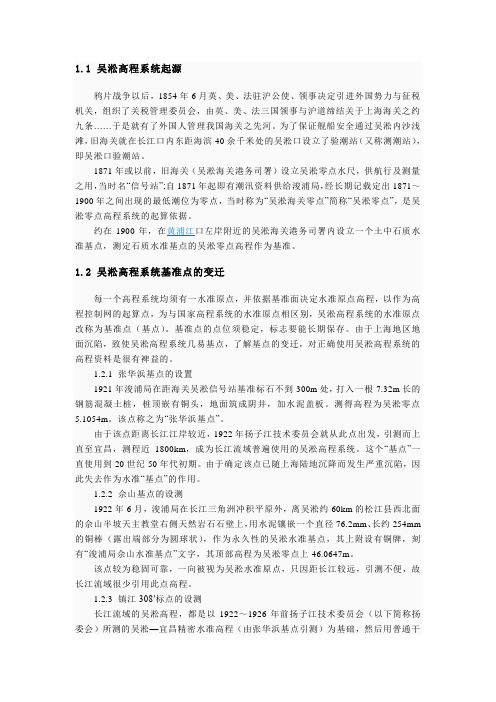
1.1 吴淞高程系统起源鸦片战争以后,1854年6月英、美、法驻沪公使、领事决定引进外国势力与征税机关,组织了关税管理委员会,由英、美、法三国领事与沪道缔结关于上海海关之约九条……于是就有了外国人管理我国海关之先河。
为了保证舰船安全通过吴淞内沙浅滩,旧海关就在长江口内东距海滨40余千米处的吴淞口设立了验潮站(又称测潮站),即吴淞口验潮站。
1871年或以前,旧海关(吴淞海关港务司署)设立吴淞零点水尺,供航行及测量之用,当时名“信号站”;自1871年起即有潮汛资料供给浚浦局,经长期记载定出1871~1900年之间出现的最低潮位为零点,当时称为“吴淞海关零点”简称“吴淞零点”,是吴淞零点高程系统的起算依据。
约在1900年,在黄浦江口左岸附近的吴淞海关港务司署内设立一个土中石质水准基点,测定石质水准基点的吴淞零点高程作为基准。
1.2 吴淞高程系统基准点的变迁每一个高程系统均须有一水准原点,并依据基准面决定水准原点高程,以作为高程控制网的起算点,为与国家高程系统的水准原点相区别,吴淞高程系统的水准原点改称为基准点(基点)。
基准点的点位须稳定,标志要能长期保存。
由于上海地区地面沉陷,致使吴淞高程系统几易基点,了解基点的变迁,对正确使用吴淞高程系统的高程资料是很有裨益的。
1.2.1 张华浜基点的设置1921年浚浦局在距海关吴淞信号站基准标石不到300m处,打入一根7.32m长的钢筋混凝土桩,桩顶嵌有铜头,地面筑成阴井,加水泥盖板。
测得高程为吴淞零点5.1054m。
该点称之为“张华浜基点”。
由于该点距离长江江岸较近,1922年扬子江技术委员会就从此点出发,引测而上直至宜昌,测程近1800km,成为长江流域普遍使用的吴淞高程系统。
这个“基点”一直使用到20世纪50年代初期。
由于确定该点已随上海陆地沉降而发生严重沉陷,因此失去作为水准“基点”的作用。
1.2.2 佘山基点的设测1922年6月,浚浦局在长江三角洲冲积平原外,离吴淞约60km的松江县西北面的佘山半坡天主教堂右侧天然岩石石壁上,用水泥镶嵌一个直径76.2mm、长约254mm 的铜棒(露出端部分为圆球状),作为永久性的吴淞水准基点,其上附设有铜牌,刻有“浚浦局佘山水准基点”文字,其顶部高程为吴淞零点上46.0647m。
水准测量及其平差
2)高差闭合差的分配和计算改正后的高差
当高差闭合差在容许范围内时,可进行高差闭合差的分
配,分配原则是:对于闭合或附合水准路线,按与路线长
度L或分配。用数学公式表示为
水准仪及其使用
§1水准测量原理
水准测量是测出地面点高程的方法之一。已知A点高 程为HA,欲测定B点的高程。首先测出A、B两点之间的高 差。则B点的高程为:HB= HA + hAB
一、水准测量的原理
为测出AB两点之间的高差,可在AB两点上分别竖立两 根标尺,在两点之间安置一架能提供水平视线的仪器,使 视线水平照准A点标尺读数,设为a,再照准B点标尺读数, 设为b,则AB两点间的高差为 :hAB =a-b
一、水准点
§2普通水准测量
水准测量的主要目的是测出一系列点的高程。通常称 这些点为水准点。我国水准点的高程是从青岛水准原点起 算的。
为了进一步满足工程建设和地形测图的需要,以国家 水准测量的三、四等水准点为起始点,尚需布设工程水准 测量或图根水准测量,通常统称为普通水准测量(也称等 外水准测量)。普通水准测量的精度较国家等级水准测量 低一些,水准路线的布设及水准点的密度可根据具体工程 和地形测图的要求而有较大的灵活性。
每次读数时均应使符合水准气泡严密吻合,每个转点 均应安放尺垫,但所有已知水准点和待求高程点上不能放 置尺垫。
四、水准测量成果整理
普通水准测量外业观测结束后,首先应复查与检核记录 手簿,并按水准路线布设形式进行成果整理,其内容包括: 水准路线高差闭合差计算与校核;高差闭合差的分配和计 算改正后的高差;计算各点改正后的高程。
(整理)导线测量平差教程—计算方案设置

计算方案的设置一、导线类型:1.闭、附合导线(图1)2.无定向导线(图2)3.支导线(图3)4.特殊导线及导线网、高程网(见数据输入一节),该选项适用于所有的导线,但不计算闭合差。
而且该类型不需要填写未知点数目。
当点击表格最后一行时自动添加一行,计算时删除后面的空行。
5.坐标导线。
指使用全站仪直接观测坐标、高程的闭、附合导线。
6.单面单程水准测量记录计算。
指仅进行单面读数且仅进行往测而无返测的水准测量记录计算。
当数据中没有输入“中视”时可以用作五等、等外水准等的记录计算。
当输入了“中视”时可以用作中平测量等的记录计算。
说明:除“单面单程水准测量记录计算”仅用于低等级的水准测量记录计算外,其它类型选项都可以进行平面及高程的平差计算,输入了平面数据则进行平面的平差,输入了高程数据则进行高程的平差,同时输入则同时平差。
如果不需进行平面的平差,仅计算闭、附合高程路线,可以选择类型为“无定向导线”,或者选择类型为“闭附合导线”但表格中第一行及最后一行数据(均为定向点)不必输入,因为高程路线不需定向点。
二、概算1.对方向、边长进行投影改化及边长的高程归化,也可以只选择其中的一项改正。
2.应选择相应的坐标系统,以及Y坐标是否包含500KM。
选择了概算时,Y坐标不应包含带号。
三、等级与限差1.在选择好导线类型后,再选择平面及高程的等级,以便根据《工程测量规范》自动填写限差等设置。
如果填写的值不符合您所使用的规范,则再修改各项值的设置。
比如现行的《公路勘测规范》的三级导线比《工程测量规范》的三级导线要求要低一些。
2.导线测量平差4.2及以前版本没有设置限差,打开4.2及以前版本时请注意重新设置限差。
四、近似平差与严密平差的选择及近似平差的方位角、边长是否反算1.近似平差:程序先分配角度闭合差再分配坐标增量闭合差,即分别平差法。
2.严密平差:按最小二乘法原理平差。
3.《工程测量规范》规定:一级及以上平面控制网的计算,应采用严密平差法,二级及以下平面控制网,可根据需要采用严密或简化方法平差。
导线复测的各项精度要求

、根据交桩情况,结合此段线路所有构造物的特点,对设计院提供的C级和D级控制网进行增设、补设控制点。
2、采用GPS复测C级网,全站仪(Ⅰ级或Ⅱ级测距精度、角度指标差1″或2″)分段符合D 级点,角度观测采用方向观测法(四测回),距离采用往返测(四测回),增补的导线点按照同精度进行附测,在复测前所使用的仪器必须进行检校,其指标差应符合以下规定:(1)、照准部旋转时,各位置气泡读数互差:DJ1型仪器不应超过2格(按两端气泡读数子和比较为4格);DJ2型仪器不应超过1格(按两端气泡读数子和比较为2格)。
(2)、光学测微器行差:DJ1型仪器不应超过1″;DJ2型仪器不应超过2″。
(3)、照准部旋转时,仪器底座位移而产生的系统误差:DJ1型仪器不应超过0.3″;DJ2型仪器不应超过1.0″。
(4)、水平轴不垂直于垂直轴之差的绝对值:DJ1型仪器不应超过10″;DJ2型仪器不应超过15″。
(5)、经纬仪2倍视轴(2C)的绝对值:DJ1型仪器不应超过20″;DJ2型仪器不应超过30″。
(6)、光学对中器旋转180°时,先后标定的两点应重合。
(7)、测尺频率的校正精度应高于1×10-6。
(8)、发射、接受、照准三轴之间应平行和重合。
(9)、周期误差的振幅不应大于仪器标称精度中固定误差的0.6倍,检定中误差不应大于0.5mm。
(10)、加常数的检定中误差不应大于仪器标称精度中固定误差的0.5倍;乘常数的检定中误差不应大于仪器标称精度中比例误差系数的0.75倍。
3、在测量作业时,仪器要轻拿轻放,键盘按钮、制动锁、微调螺旋要柔手操作,仪器搬站必须装箱,作业应符合下列规定:(1)、应检校三周轴的平行性与圆水准器及光学对中器。
(2)、视线宜高于地面和离开障碍物1.3m以上。
(3)、视线应避免通过受电、磁场干扰的地方,一般要求离开高压线2~5m。
(4)、视线宜避免通过发热体(如散热塔、烟囱等)。
(5)、视线背影应避免反光体,在反射光束范围内,不得同时出现两个反射器,测距时步话机应暂停使用。
高程控制网平差
1.单位权中误差的计算公式:
m0 ˆ0
PVV
r
2.每km高差中误差:
m m0
C
3.最弱点的高程中误差
最弱点是指误差最大的待定水准点,一般为离开已知水准点 最远的点。首先要列出最弱点的权函数式:
V F f 1V1 f 2V 2 f nV n
利用m f
1
m0式P计f 算最弱点高程中误差。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
在水准网中,把3条或3条以 上水准路线的交点称为结点。 两条水准路线的交点称为节点。
(一)按间接平差法对结点进行平差
1.误差方程式的列立
不考虑水准路线中的节点,将水准路线的高差作为独立观测 值,取结点的近似高程改正数为未知数,列立每条水准路线 高差观测值的误差方程。
如图,路线高差观测值以表示,已知
(一)按间接平差法对结点进行平差
3.法方程式的解算 法方程式系数阵的逆阵为:
Q
N Q QQ 1
11
XX
21
31
Q 12
Q 22
Q 32
Q
13
Q Q23
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
高差平差表
最弱高差段
水准网等级:2等
水准网类型:几何水准网
定权方式:1/S
平差数据采用原始高差数据
水准点数(已知/未知):4/306 观测数:330
验后单位权中误差:Mo=0.7833mm/km
高程表
最弱点
复测高差比较表
闭合差
1: GD520 →GD519,点数=49 S=3.593km fh=0.00353m < 限差:0.00758m 合限√2: GD519 →GD518,点数=55 S=4.265km fh=-0.00384m < 限差:0.00826m 合限√3: GD518 →GD517,点数=64 S=4.995km fh=-0.00138m < 限差:0.00894m 合限√4: 1 ◎,点数=40 S=3.142km fh=-0.00059m < 限差:0.00709m 合限√
5: WD3 ◎,点数=8 S=0.579km fh=-0.00001m < 限差:0.00304m 合限√
6: WD4 ◎,点数=8 S=0.591km fh=-0.00019m < 限差:0.00308m 合限√
7: WD5 ◎,点数=8 S=0.583km fh=-0.00009m < 限差:0.00305m 合限√
8: WD6 ◎,点数=8 S=0.596km fh=-0.00025m < 限差:0.00309m 合限√
9: WD7 ◎,点数=8 S=0.600km fh=-0.00000m < 限差:0.00310m 合限√
10: WD8 ◎,点数=8 S=0.595km fh=0.00003m < 限差:0.00309m 合限√
11: WD9 ◎,点数=8 S=0.493km fh=0.00000m < 限差:0.00281m 合限√
12: 41 ◎,点数=14 S=0.876km fh=0.00014m < 限差:0.00374m 合限√
13: WD10 ◎,点数=6 S=0.511km fh=0.00000m < 限差:0.00286m 合限√
14: WD11 ◎,点数=8 S=0.695km fh=-0.00011m < 限差:0.00333m 合限√15: WD12 ◎,点数=6 S=0.575km fh=-0.00012m < 限差:0.00303m 合限√16: WD13 ◎,点数=8 S=0.750km fh=0.00005m < 限差:0.00347m 合限√
17: WD14 ◎,点数=8 S=0.678km fh=0.00000m < 限差:0.00329m 合限√
18: WD15 ◎,点数=6 S=0.556km fh=-0.00020m < 限差:0.00298m 合限√19: WD16 ◎,点数=12 S=0.914km fh=-0.00012m < 限差:0.00382m 合限√20: WD17 ◎,点数=6 S=0.533km fh=0.00034m < 限差:0.00292m 合限√
21: WD18 ◎,点数=10 S=0.584km fh=0.00045m < 限差:0.00306m 合限√22: WD19 ◎,点数=24 S=1.858km fh=0.00000m < 限差:0.00545m 合限√23: 84 ◎,点数=28 S=2.097km fh=0.00000m < 限差:0.00579m 合限√24: WD20 ◎,点数=8 S=0.646km fh=0.00081m < 限差:0.00322m 合限√25: WD21 ◎,点数=6 S=0.552km fh=0.00005m < 限差:0.00297m 合限√26: WD22 ◎,点数=8 S=0.582km fh=0.00009m < 限差:0.00305m 合限√27: WD23 ◎,点数=8 S=0.586km fh=-0.00015m < 限差:0.00306m 合限√28: WD24 ◎,点数=68 S=5.615km fh=-0.00021m < 限差:0.00948m 合限√。