二等水准点高程平差计算表
水准平差计算步骤
水准平差计算步骤水准平差是一种测量方法,用于测量和确定不同点之间的高度差。
水准平差的步骤可以分为以下几个阶段:前方测量、后方处理、闭合检查、精度分析和结果调整。
第一阶段:前方测量1.确定测量线路和测量点:在测量区域内选择一条线路,并在此线路上选择起始点和终点作为测量点。
2.设置基准点:根据需要确定一个基准点,用于参考测量结果。
通常选择已知高程的点作为基准点。
3.进行观测:使用水准仪在起始点和终点之间进行测量。
观测时,需要记录下各点的观测高程和其他相关参数,如气温、大气压、仪器的仰角和方位角等。
4.进行中间高程点的观测:在起始点和终点之间选择若干个中间点,使用水准仪进行观测。
第二阶段:后方处理1.数据处理:对测量得到的数据进行处理,包括计算测点的高程差、观测误差等。
2.误差分析:通过统计学方法对数据进行误差分析,以确定各个观测点的可靠性和测量结果的精度。
3.编制水准平差表:将观测得到的高程数据整理成水准平差表,列出各点的观测高程、观测值的改正数和平差后的高程。
第三阶段:闭合检查1.进行闭合检查:通过计算起始点和终点的高程差,确定测量线路的闭合差。
闭合差越小,说明测量的准确性越高。
2.判断闭合差的合格与否:根据地理和测量精度要求,判断测量的闭合差是否符合要求。
如果闭合差超出了规定的误差范围,则需要对数据进行修正。
第四阶段:精度分析1.进行精度分析:根据测量数据和观测结果的误差范围,对测量线路的观测结果进行精度分析,评估测量的准确性。
第五阶段:结果调整1.进行结果调整:根据精度分析的结果,对测量结果进行调整,以满足测量的要求。
调整的方法可以采用最小二乘法或最小二乘平差法等。
2.重新校正观测数据:在进行结果调整后,需要对所有观测数据进行重新校正,以确保所有数据是正确和一致的。
总结:水准平差计算的步骤包括前方测量、后方处理、闭合检查、精度分析和结果调整。
每个步骤都有其特定的目的和方法,以确保测量结果的准确性和可靠性。
二等水准平差单位权重误差

二等水准平差单位权重误差1.引言1.1 概述概述部分主要介绍文章所要讨论的主题,即二等水准平差单位权重误差。
此处将简要介绍二等水准平差的背景和基本概念,并说明本文的研究目的和重要性。
二等水准平差是在大地测量中的一项重要工作,它用于处理水准仪观测数据,以估算地表高程数据。
在观测数据处理过程中,单位权重误差是一个重要的概念,它描述了各个观测值的精度和可靠性。
本文将主要讨论二等水准平差中的单位权重误差对观测数据处理结果的影响。
单位权重误差是指在水准测量过程中,由于各种因素的影响,导致各个观测值的精度存在差异。
我们将介绍单位权重误差的定义和计算方法,并探讨其影响因素以及应用和局限性。
研究二等水准平差单位权重误差的目的在于帮助测量人员更加准确地理解和使用水准测量数据。
通过了解单位权重误差的特点和影响因素,我们能够更准确地评估观测数据的精度,为后续工作提供准确的基础数据。
在工程和测绘领域,二等水准平差单位权重误差的准确估计对于保证项目的质量和可靠性至关重要。
通过本文的探讨,我们希望能够提高对单位权重误差的认识,为相关行业的专业人员提供参考和指导,从而提高二等水准测量的准确性和可靠性。
总之,本文将深入探讨二等水准平差单位权重误差,旨在加深对于单位权重误差的理解,为大地测量提供更准确、可靠的数据支持。
1.2 文章结构文章结构部分应包含对整篇文章的概括和组织安排的介绍。
在本篇文章中,我们将探讨二等水准平差单位权重误差的概念、定义、计算方法以及其影响因素、应用和局限性。
文章结构如下:首先,我们将通过引言部分对整个文章进行概述。
我们会介绍二等水准平差的基本概念以及本篇文章的目的。
接下来,我们将进入正文部分,首先介绍二等水准平差的基本概念。
这一部分将涵盖二等水准的定义、平差过程以及平差结果的表示方法,为后续对单位权重误差的讨论奠定基础。
然后,我们将详细介绍二等水准平差单位权重误差的定义和计算方法。
我们会解释什么是单位权重误差,以及如何通过观测值与平差值之间的差异来计算单位权重误差。
高程控制网平差

i
i
i
h h V 改厕厕短的改正数, 代入上式,得:
i
i
i
V1 V2 V3 V4 W 0
W H A h1 h2 h3 h4 H B
1.附合水准路线的条件数和条件方程式组成
观测值5个,待定水准点2 个,所以条件有3个,可 以列出3个条件方程:
h1
H B h1 h2 H A 0
V 1 V 3 V 2 W a 0 V 2 V 4 V 6 W b 0 V 4 V 5 V 3 W c 0
(二)观测值权的确定:
1.各水准路线都进行了往返观测,每公里水准路线的观测中误差为 ,
则m:i
R mi2
1 4n
n i
2 i
i
式中,为测往返测高程不符值,以mm为单位;R为测段长度,以km为单位;n
H A h2 h3 h5 H D 0
H B h1 h3 h4 H C 0
一般以1个已知点为起点,其它已知点为终点,所构成的附合 水准路线为已知点数减1,这样可以列出的条件方程式为已知 水准点个数减1.
2.闭合水准路线的条件数和条件方程式的组成
从一个水准点出发,经过若干水准测段,又回到该 水准点,这样的水准路线称为闭合水准路线。
V 1 V 7 V 8 W b 0
V 2 V 8 V 7 W c 0
V 3 V 5 V 8 W d 0
V 4 V 6 V 5 W e 0
2.闭合水准路线的条件数和条件方程式的组 成
图(c)是四边形状水准网,网中有4个待定点,没有已知点, 在平差计算时,只能确定个待定水准点之间的相互关系,如 果确定一个水准点的高程,就可以确定其他点的高程。因此, 该网的必要观测是3个,观测值总数是6个,又3个多余观测, 可以列出3个条件方程。为了让所列立的条件方程式互相独 立,没个条件方程都要求有一个其他方程没有用到的观测值, 即:
高差闭合差计算原理及公式
建筑工程测量中高差闭合差的计算与调整摘 要:在高程控制测量中,可以通过计算高差闭合差来检核观测成果的质量。
而高差闭合差这一概念,在建筑工程测量的实际应用中容易混淆。
文章从高差闭合差计算、调整和高程计算三个方面入手, 给出了对高差闭合差理解的思路,以及在控制测量中高差闭合差平差的新方法。
经实践验证,有益于工作效率的提高。
关键词:水准测量;高差闭合差;平差0 前言在建筑工程测量中,当待测点距已知点较远时,必须进行高程控制测量。
高程测量的方法有多种,其中水准测量是精确测量地面点高程的主要方法,在实际工作中应用十分广泛。
沿线布设临时水准点,从已知点出发,沿闭合路线、附合路线、支路线等三种路线进行水准测量,三种水准路线的区别见表1。
由于支水准路线缺乏检核条件,规定在支水准路线中必须进行往返测量。
这样,在三种水准路线中,终点都是已知点。
表1 水准路线的区别水准路线 起点 终点 起点与终点的位置 备注 闭合水准路线 BM1 BM1 相同 环线 附合水准路线 BM1 BM2 不相同支水准路线BM1BM1相同沿原路线返回。
如:BM1→1→2→3→4→3→2→1→BM1由于仪器(工具)误差、观测误差、外界条件的影响等测量误差的存在,在水准测量中不可避免地会出现测量误差。
当待测点距已知点较远时,经过多测站的观测后,在待测点上必然积累了一定的误差,这些误差的多少只有通过多余观测才可得知。
多余观测在这里体现为对终点进行观测。
用终点的实测高程与终点的理论高程去进行比较,从而得知产生了多少误差,这个误差就是高差闭合差。
对水准测量的成果进行检核,当测量误差在容许范围之内就必须对产生的测量误差,即高差闭合差进行调整,这就是控制测量中的平差。
1 高差闭合差的计算在相关书目 [1]中,高差闭合差可以定义为:在控制测量中,实测高差的总和与理论高差的总和之间的差值,表示为∑∑-=理测h hf h 。
在外业时,可用该公式检验外业的质量,判断是否结束外业。
二等水准测量及科傻平差操作教程

二等水准测量及平差计算操作教程一、前言二等水准测量称为精密水准测量。
是用水准仪和水准尺测定地面上两点间高差的方法。
在地面两点间安置水准仪,观测竖立在两点上的水准标尺,按尺上读数推算两点间的高差。
通常由水准原点或任一已知高程点出发,沿选定的水准路线逐站测定各点的高程。
主要作为大城市的高程控制;地面沉降;精密工程测量。
二、主要技术标准执行规范:《国家一、二等水准测量规范》GB/T 12897-2006三、主要内容作业流程图1、首先进行现场地形和控制点勘察,查看控制点具体位置并记录(可在奥维地图上标记),查看是否有控制点被破坏,周围地形是否便于测量。
2、勘察完成后,根据施工需求按规范要求埋设加密点,加密点要埋设在坚实牢固的土质上,防止后期沉降。
3、根据勘察情况,制定测量路线,尽量选择距离最短、高差较小、土质坚硬的线路。
4、设置测量参数开始测量,以徕卡LS10为例:4.1测量前首先校验仪器和水准尺零点误差,测量时仪器水准气泡对中整平,然后在主菜单中选择工具-区域设置-单位设置,距离单位米,高程位数为5位,距离位数为3位,温度℃。
4.2在主菜单中选择工具-区域设置-模式设置,模式有五种:单次、平均、平均S、中值、跟踪。
选择平均。
4.3设置作业:在主菜单界面选择程序-线路测量进入配置界面,点击设置作业。
新建一个作业,输入作业名称,作业员名称。
4.4设置限差:按照二等水准标准设置限差,最小视距为3米(仪器到水准尺的距离要大于3米),最大视距为50米,前后视距差为1.5米(后视水准尺到仪器的距离与前视水准尺到仪器的距离之差不大于1.5米),累计视距差为6米(本次的前后视距差+往次所有的前后视距差之和不大于6米),最高视线2.8米(仪器望远镜十字丝横丝与水准尺水平视线不超过2.8米,2米的水准尺则输入1.8米),最低视线0.55米),B1-F1/B2-F2 0.00030m(第一次后视读数-前视读数与第二次后视读数-前视读数不大于0.3mm)。
高程平差方法 举例说明
高程平差方法举例说明引言在工程建设中不免要对高程控制网进行高精度计算,手工计算对于较为简单的控制网还可适应,但对于较为复杂、节点较多的高程控制网来讲使用手工计算容易出现误差且非常耗时,因此我们针对高程控制网的平差计算原理进行了分析,并利用这一原理结合计算机技术进行了高效的控制网平差计算。
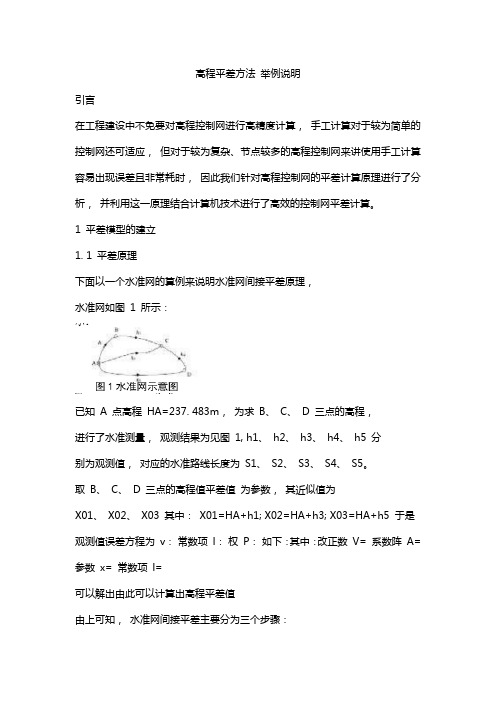
1 平差模型的建立1. 1 平差原理下面以一个水准网的算例来说明水准网间接平差原理,水准网如图1 所示:已知A 点高程HA=237. 483m,为求B、C、D 三点的高程,进行了水准测量,观测结果为见图1, h1、h2、h3、h4、h5 分别为观测值,对应的水准路线长度为S1、S2、S3、S4、S5。
取B、C、D 三点的高程值平差值为参数,其近似值为X01、X02、X03 其中:X01=HA+h1; X02=HA+h3; X03=HA+h5 于是观测值误差方程为v:常数项l:权P:如下:其中:改正数V= 系数阵A= 参数x= 常数项l=可以解出由此可以计算出高程平差值由上可知,水准网间接平差主要分为三个步骤:(1)高程近似值的计算;(2)列立观测值的误差方程;(3)解误差方程并求高程平差值。
1. 2 常数项矩阵的问题在求近似高程时,同一个未知点的近似高程并不是唯一的一个确定值,它的值随着计算时选择的线路不同而改变,因此得出的常数项矩阵L 也并不是唯一的,在下面的程序计算里面,输入已知数据时线路的排序不同,得出的常数项矩阵L 也不同,当然最后得到的高程改正数也不一样,由于进行平差计算时设的未知数就是未知点高程的近似值,因此在最后得到的未知点的高程平差值跟计算高程近似值时选择的线路无关,只要计算正确,最终得到的高程平差值也是正确的。
这一点可以在使用程序的过程中进行检验,无论线路排序如何改变,只要数据输入正确,得到的结果是一样的。
2 平差程序设计2. 1 关于程序语言的选用考虑到本软件所要解决的问题主要是数据的处理与计算,不涉及到计算机系统底层的操作,因此选用相对简单的Visual Basic 6. 0 来进行程序的编写,使用间接平差模型,在保证计算精度的同时,一来减少了代码编写的难度,二来提高了代码执行的效率。
3-2 高程网条件平差
§3-2 高程网条件平差0.5学时高程网包括水准网和三角高程网。
对高程网进行条件平差时,一般以已知高程点的高程值作为起算数据,以各测段的观测高差值作为独立观测值,写出其满足的条件关系式,按照条件平差的原理解算各高差值的改正数和平差值,然后再计算出各待求点的高程平差值,并进行精度评定。
一、高程网条件方程的个数及条件方程式进行条件平差时,首先要确定条件方程的个数。
从上节内容可知道,在一般情况下,条件方程式的个数与多余观测的个数r相符。
而要确定多余观测个数就必须先确定必要观测个数t。
高程测量(包括三角高程测量和水准测量)的主要目的是确定未知点的高程值。
如图3-2所示高程网中,有2个已知高程点A、B,3个未知高程点C、D、E和8个高差观测值。
从图中可以看出,要确定3个未知点的高程值,至少需要知道其中的3个高差观测值(如h1、h2、h3,或h6、h7、h8,或h2、h4、h5等多种选择),即必要观测个数t = 3。
图3-2 则多余观测个数r = n – t = 8 - 3 = 5,可以写出这5个条件方程式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-++=+-=-+=+-=--0ˆˆ0ˆˆ ˆ0ˆˆˆ0 ˆˆˆ 0ˆˆˆ72875764532421B A H H h h h h h h h h h h h h h h相对应的改正数条件方程式形式⎪⎪⎪⎭⎪⎪⎪⎬⎫=-+=-+-=--+=-+-=--+00 0005724875376425321421w v v w v v v w v v v w v v v w v v v其中⎪⎪⎪⎭⎪⎪⎪⎬⎫-++-=+--=-+-=+--=---=)()()()()(7258754764353224211B A H H h h w h h h w h h h w h h h w h h h w这些条件方程式(或改正数条件方程式),大体上分为两类:其一是闭合路线情况,如条件方程式中前四个条件方程式,可称为闭合条件方程式;其二是附合路线情况,如条件方程式中第五个,反应的是从A 点出发后测得的B 点的高程值是否与B 点的已知高程值相等的问题,可称为附合条件方程式。
一二等水准测量规范
城市轨道交通工程~地面高程控制测量一、二等水准测量规范4.1 一般规定4.1.1 城市轨道交通工程高程测量应采用统一的高程系统,并应与现有城市高程系统相一致。
4.1.2 城市轨道交通工程高程控制网为水准网,应分两个等级布设:一等水准网是与城市二等水准网精度一致的水准网,二等水准网是加密的水准网。
现有城市一、二等水准点间距小于4km时,应一次布设城市轨道交通工程二等水准网。
4.1.3 水准网应沿线路附近线路布设成附合线路、闭合线路或节点网。
二等水准点间距平均800m,联测城市一、二等水准点的总数不应少于3个,宜均匀分布。
4.1.4 水准网测量的主要技术要求应符合表4.1.4的规定。
表4.1.4 水准网测量的主要技术要求2 采用数字水准仪测量的技术要求与同等级的光学水准仪测量技术要求相同。
4.1.5 水准点应选在施工影响的变形区域以外稳固、便于寻找、保存和引测的地方,宜每隔3km埋设1个深桩或基岩水准点。
车站、竖井及车辆段附近水准点布设数量不应少于2个。
4.1.6 当水准路线跨越江、河、湖、塘且视线长度小于100m时,可采用一般水准测量方法进行观测;视线长度大于100m时,应进行跨河水准测量。
跨河水准测量可采用光学测微法、倾斜螺旋法、经纬仪倾角法和光电测距三角高程法等,其技术要求应符合现行国家标准《国家一、二等水准测量规范》GB12897的相关规定。
4.1.7 水准点标石和标志应按本规范附录B中的图B.0.1、图B.0.2、图B.0.3和图B.0.4的形式和规格埋设适宜的水准标石。
水准点也可以利用精密导线点标石,墙上水准点应选在稳固的永久性建筑上。
4.1.8 水准点标石埋设结束后,应绘制点之记,并办理水准点委托保管书。
4.1.9 对已建成的水准网应定期进行复测,第一次复测应在开工前进行,之后应一年复测一次,且应根据点位稳定情况适当调整复测频次。
复测精度不应低于原测精度,高程较差不应大于倍高程中误差。
导线测量平差记录表
导线测量平差最近更新导线测量平差最近发布4.2版,主要增加或更新了以下功能:(如表格显示不正常,请刷新)一、表格输出。
表格输出到WORD,支持表格中的列向下错开半行(如方位角、边长),所有表格输出到WORD后与软件中显示的样式一样。
如下表:导线严密平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28二、导线采用近似平差且方位角边长不进行反算时的表格样式。
原表格中显示的是坐标增量改正数,现增加了一个选项,可以选择显示改正后的坐标增量,以满足一些工程要求格式统一的要求。
导线平差计算表工程名称:附合及水准示例等级:城市二级计算者:杨运英校核者:日期:2003.08.28、坐标导线平差。
指使用全站仪直接观测坐标、高程的闭、附合导线,其中平面坐标完全差的分配方式可以选用“按边长”、“按坐标增量”、“坐标转换”等方式。
坐标导线平差计算表工程名级:城市二级:杨运英校核者:日期:200四、单面单程水准记录计算已知点较密时线路中间也可以穿过已知点。
当含有中视时可以用于中平测量等,表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算者:校核者:日期:不含有中视时可用于五等、等外水准等的记录、计算。
表格形式如下:水准测量记录计算表测线:仪器:观测:天气:地点:记录:计算:校核:日期:部测量知点设站,后视另一已知点,观测各碎部点,计算其坐标、高程,绘制图形并可输出到CAD。
方式可以选用“斜距+天顶距”、“平距+高差”或“视距+天顶距”。
距+高差”方式表格如下:碎部测量记录后视:B 测站高程:仪高:气:复核:距”(或“斜距+天顶距”)表格如下:碎部测量记录后视:B 测站高程:指标差:0" 天气:记录:日期:坐标转换于同椭球的不同坐标系间进行转换。
比如同椭球的国家坐标系与工程独立坐标系的转换。
坐标转换计算表工程名第页计算:复核:日期:支导线计算里指输入方位角与边长计算坐标的支导线,如需输入水平角、边长计算各点坐标,请使用“平差计算”模块中的支导线进行计算。
水准测量平差
·85·
1—7—1 1957 年中国东南部精密水准平差图(安徽省部分)
·86·
〔长(委)办 二、三 、四等 水准 平 差〕 长(委)办在完成宜昌以下沿江两岸,精密水准测量后进行 7 个水准路线环平差(简称
7 环平差),起算点为镇江 Y .R .C .BM 308’,属吴淞高程系。 中 国东 南 部精 密水 准 平差 后,长(委)办 又在 长 江流 域增 测 新线 ,省境 内 新布 设两 条 二
第二轮全国二等水准网平差,以 1986 年平差的一等水准成果为起算 数据,以一 等水 准路线环为单位,安徽省内及周边地区有 66、33、34、35、38 环参加平差。此项工作由国家 测绘局西安数据处理中心承担,至 1989 年还未结束。
·87·
〔安 徽省 水利 厅 勘测 设计 院 三、四 等水 准 平差〕 1959 年,安徽省水利厅勘测设计院对 前淮委、前水 利厅、长办、总 参测绘 局及本单 位 在省内所测的三、四等水准资料整理分析后,以国家二等水准路线环为单 位,用逐次 趋近 法进行整体平差。全省有 13 个二等环,由北向南依次编号,平差结果载于 1959 年 10 月编 印的《安徽省三、四等水准成果表》中,系 1956 年黄海高程。为了比较和应用方便,表内大 部分 点同 时载 有 1956 年 黄海 高程 和初 算高 程,表内 载有 安徽 省内 三、四等 水 准点 6367 个。 1978 年,该院会同阜阳、宿县地区水利局,整理了 1976 年前,各测量单位在淮北地区 布设的各级水准点,共 3421 个(包括接测水准的三角点),1978 年 6 月,以县为单位,编制 出版《淮 北地 区水 准 成果 表》。表 中绘 有 以县 为单 位 的水 准路 线 图,部 分点 载 有废 黄河 系 统 的高程值。其新、旧高程系统(1956 年黄海高程值减去废黄河高程值)的差值,在+0.100 ~+0.153 米之间,中数为+0.130 米。