Simulink建模与仿真
第五章 Simulink系统建模与仿真

本章重点
Simulink基本结构 Simulink模块 系统模型及仿真
一、Simulink简介
Simulink 是MATLAB 的工具箱之一,提供交互式动态系统
建模、仿真和分析的图形环境
可以针对控制系统、信号处理及通信系统等进行系统的建 模、仿真、分析等工作 可以处理的系统包括:线性、非线性系统;离散、连续及 混合系统;单任务、多任务离散事件系统。
从模块库中选择合适的功能子模块并移至编辑窗口中,按 设计要求设置好各模块的参数,再将这些模块连接成系统 Simulink的仿真过程就是给系统加入合适的输入信号模块 和输出检测模块,运行系统,修改参数及观察输出结果等
过程
二、Simulink的基本结构
Simulink窗口的打开
命令窗口:simulink 工具栏图标:
三、Simulink模型创建
7、信号线的标志
信号线注释:双击需要添加注释的信号线,在弹出的文本编辑 框中输入信号线的注释内容
信号线上附加说明:(1) 粗线表示向量信号:选中菜单Forma t|Wide nonscalar lines 即可以把图中传递向量信号的信号线用粗 线标出;(2)显示数据类型及信号维数:选择菜单Format|Port data types 及Format|Signaldimensions,即可在信号线上显示前 一个输出的数据类型及输入/输出信号的维数;(3) 信号线彩 色显示:选择菜单Format|Sample Time Color,SIMULINK 将用 不同颜色显示采样频率不同的模块和信号线,默认红色表示最 高采样频率,黑色表示连续信号流经的模块及线。
同一窗口内的模块复制: (1)按住鼠标右键,拖动鼠标到目标
第3章 Simulink建模与仿真
将仿真数据写入 mat 文件 将仿真数据写入. mat文件 将仿真数据输出到 将仿真数据输出到 Matlab 工作空间 MATLAB 工作空间 使用 Matlab 使用MATLAB 图形显示数据 图形显示数据
图3.10 系统输出模块库及其功能
第3章 Simulink建模与仿真
模块功能说明:
模块功能说明: 有限带宽白噪声
求取输入信号的数学函数值 对输入信号进行内插运算
求取输入信号的数学函数值 对输入信号进行内插运算 输入信号的一维线性内插
输入信号的一维线性内插
输入信号的二维线性内插 输入信号的二维线性内插 输入信号的 n 维线性内插 输入信号的n维线性内插
M函数(对输入进行运算输出结果) M 函数,对输入进行运算输出结果 多项式求值
第3章 Simulink建模与仿真
模块功能说明: 模块功能说明 : 连续信号的数值微分 连续信号的数值微分 输入信号的连续时间积分 输入信号的连续时间积分 单步积分延迟,输出为前一个输入 单步积分延迟,输出为前一个输入 线性连续系统的状态空间描述 线性连续系统的状态空间描述
线性连续系统的传递函数描述 线性连续系统的传递函数描述 对输入信号进行固定时间延迟 对输入信号进行固定时间延迟 对输入信号进行可变时间延迟 对输入信号进行可变时间延迟 线性连续系统的零极点模型 线性连续系统的零极点模型
合并输入信号块控制信息 信号组合器信号组合器 信号探测器信号探测器 信号维数改变器 选择或重组信号 信号线属性修改 输入信号宽度
信号维数改变器 选择或重组信号 信号线属性修改 输入信号宽度
第3章 Simulink建模与仿真
模块功能说明: 对信号进行分配
Target模块库:主要提供各种用来进行独立可执行代码 或嵌入式代码生成,以实现高效实时仿真的模块。它 们和RTW、TLC有着密切的联系。 (6) Stateflow库:对使用状态图所表达的有限状态 机模型进行建模仿真和代码生成。有限状态机用来描 述基于事件的控制逻辑,也可用于描述响应型系统。
MatlabSimulink系统建模和仿真

图:电容的充电、放电过程的仿真结果。在充电仿真中,输出信号 为系统的零状态响应。在放电过程仿真中,输出信号为系统的零输 入响应。 如果要仿真系统输入信号为任意函数的情况,只需要修改仿 真程序中的输入信号设臵即可。
“实例2.3”单摆运动过程的建模和仿真。 (1)单摆的数学模型 设单摆摆线的固定长度为l ,摆线的质量忽略不计,摆锤质 量为m ,重力加速度为g ,设系统的初始时刻为t=0 ,在任 意 t 0 时刻摆锤的线速度为v(t) ,角速度为 w(t ) ,角位移 为 (t ) 。以单摆的固定位臵为坐标原点建立直角坐标系, 水平方向为x 轴方向。如下图所示。
图:电容的充电电路以及等价系统
(1)数学分析
首先根据网络拓扑和元件伏安特性建立该电路方程组
dy (t ) i (t ) C dt
dy (t ) 1 1 x(t ) y (t ) dt RC RC
y(t ) x(t ) Ri (t )
并化简得
该方程也称为系统的状态方程。在方程中,变量y 代表电 容两端的电压,是电容储能的函数。本例中它既是系统的 状态变量,又是系统的输出变量。
7.1 Matlab编程仿真的方法
7.1.1 概述 通过编程的形式建立计算机仿真模型是最基本的 计算机建模方法。Matlab编程仿真过程就是用编 写脚本文件或函数文件来描述数学模型,并实现 计算机数值求解的过程。 我们把外界对系统产生作用的物理量称为输入 信号或激励,把由于系统内部储存的能量称为系 统的状态,而将系统对外界的作用物理量称为系 统的输出信号或响应。
图:模拟真实示波器显示的调幅仿真波形,仿真中考虑了输 入信号与示波器扫描不同步,载波相位噪声以及加性信道噪 声的影响
7.1.3 连续动态系统的Matlab编程仿真 7.1.3.1 几个实例
Simulink建模与仿真(精华版)
上 页 下3 页
Simulink的特点:
(1)丰富的可扩充的预定义模块库 ; (2)交互式的图形编辑器来组合和管理直观的模块图 ; (3)以设计功能的层次性来分割模型,实现对复杂设计的管理; (4)通过Model Explorer 导航、创建、配置、搜索模型中的任
Simulink 仿真基础
1 Simulink的概述 2 基本操作 3 基本模块 4 建模方法 5 系统仿真举例
1
3.1 Simulink的概述
Simulink已经成为动态系统建模和仿真领域中应用最为广泛的软件之 一。Simulink可以很方便地创建和维护一个完整的模块,评估不同的 算法和结构,并验证系统的性能。由于Simulink是采用模块组合方式 来建模,从而可以使得用户能够快速、准确地创建动态系统的计算机 仿真模型,特别是对复杂的不确定非线性系统,更为方便。
Accelerator,Rapid Accelerator)来决定以解释性的方式运行 或以编译C代码的形式来运行模型 ; (8)图形化的调试器和剖析器来检查仿真结果,诊断设计的性 能和异常行为 ; (9)可访问MATLAB从而对结果进行分析与可视化,定制建模环境, 定义信号参数和测试数据; (10)模型分析和诊断工具来保证模型的一致性,确定模型中的错误。
说明 输入信号的积分运算 输入信号的微分运算 实现线性状态空间系统模型 实现线性传递函数系统模型 实现零-极点表达式的传递函数模型 输出前一个时间步的输入值 对输入信号进行传输延时后再输出 对输入信号进行可变时间的传输延时后再输出
⑤ 决定所有无显示设定采样时间的模块的采样时间; ⑥ 分配和初始化用于存储每个模块的状态和输入当前值的存储空间。
simulink建模与仿真流程

simulink建模与仿真流程我们需要在Simulink中创建一个新的模型。
打开Simulink软件后,选择“File”菜单中的“New”选项,然后选择“Model”来创建一个新的模型。
接着,我们可以在模型中添加各种组件,如信号源、传感器、执行器等,以及各种数学运算、逻辑运算和控制算法等。
在建模过程中,我们需要定义模型的输入和输出。
在Simulink中,可以使用信号源模块来定义模型的输入信号,如阶跃信号、正弦信号等。
而模型的输出信号可以通过添加显示模块来实现,如示波器模块、作用域模块等。
接下来,我们需要配置模型的参数。
在Simulink中,可以通过双击组件来打开其参数设置对话框,然后根据需求进行参数配置。
例如,对于控制系统模型,我们可以设置控制器的增益、采样时间等参数。
完成模型的配置后,我们可以进行仿真运行。
在Simulink中,可以选择“Simulation”菜单中的“Run”选项来运行仿真。
在仿真过程中,Simulink会根据模型的输入和参数进行计算,并生成相应的输出结果。
我们可以通过示波器模块来实时显示模型的输出信号,以便进行结果分析和调试。
在仿真过程中,我们可以通过修改模型的参数来进行参数调优。
例如,可以改变控制器的增益值,然后重新运行仿真,观察输出结果的变化。
通过不断调整参数,我们可以优化模型的性能,使其达到设计要求。
除了单一模型的仿真,Simulink还支持多模型的联合仿真。
通过将多个模型进行连接,可以实现系统级的仿真。
例如,我们可以将控制系统模型和物理系统模型进行连接,以实现对整个控制系统的仿真。
在仿真完成后,我们可以对仿真结果进行分析和评估。
Simulink提供了丰富的分析工具,如频谱分析、时域分析和稳定性分析等。
通过对仿真结果的分析,我们可以评估模型的性能,并进行进一步的改进和优化。
Simulink建模与仿真流程包括创建模型、添加组件、定义输入输出、配置参数、运行仿真、参数调优、联合仿真和结果分析等步骤。
薛定宇simulink建模与仿真随书仿真

薛定宇simulink建模与仿真随书仿真
本文介绍了关于薛定宇在其著作《 MATLAB/Simulink在工程实践中的应用》中所提及的Simulink建模与仿真方法。
Simulink是MATLAB中的一个工具箱,可用于建立动态系统模型,并进行仿真分析。
首先是建模方面,Simulink中的模型结构可以看做一个有向图,其中包含系统中各个组件之间的输入输出关系。
对于系统中的各个组件,可以使用Simulink库中已有的组件,如数学运算、逻辑运算等,
也可以通过自定义S-Function的方式实现。
在建模时,需要注意各个
组件之间的连接方式,以确保输入输出之间的连通性。
其次是仿真方面,Simulink提供了多种仿真方法,包括常规仿真、加速仿真、硬件仿真等。
常规仿真是指按照离散时间步长逐步仿真整
个模型,进行结果输出;加速仿真则是在保证精度的前提下,通过一
系列技术加速仿真过程,缩短仿真时间;硬件仿真是指将模型加载到
特定的硬件设备上,进行真实环境的测试。
针对不同的仿真需求,可
以选择适合的仿真方法。
总之,Simulink作为一款强大的建模仿真工具,可以广泛应用于工程实践中,从而加速工程开发过程,提高工程设计效率。
如何使用MATLABSimulink进行动态系统建模与仿真

如何使用MATLABSimulink进行动态系统建模与仿真如何使用MATLAB Simulink进行动态系统建模与仿真一、引言MATLAB Simulink是一款强大的动态系统建模和仿真工具,广泛应用于各个领域的工程设计和研究中。
本文将介绍如何使用MATLAB Simulink进行动态系统建模与仿真的方法和步骤。
二、系统建模1. 模型构建在MATLAB Simulink中,可以通过拖拽模块的方式来构建系统模型。
首先,将系统的元件和子系统模块从库中拖拽到模型窗口中,然后连接这些模块,形成一个完整的系统模型。
2. 参数设置对于系统模型的各个组件,可以设置对应的参数和初始条件。
通过双击模块可以打开参数设置对话框,可以设置参数的数值、初始条件以及其他相关属性。
3. 信号连接在模型中,各个模块之间可以通过信号连接来传递信息。
在拖拽模块连接的同时,可以进行信号的名称设置,以便于后续仿真结果的分析和显示。
三、系统仿真1. 仿真参数设置在进行系统仿真之前,需要设置仿真的起止时间、步长等参数。
通过点击仿真器界面上的参数设置按钮,可以进行相关参数的设置。
2. 仿真运行在设置好仿真参数后,可以点击仿真器界面上的运行按钮来开始仿真过程。
仿真器将根据设置的参数对系统模型进行仿真计算,并输出仿真结果。
3. 仿真结果分析仿真结束后,可以通过查看仿真器界面上的仿真结果来分析系统的动态特性。
Simulink提供了丰富的结果显示和分析工具,可以对仿真结果进行绘图、数据处理等操作,以便于对系统模型的性能进行评估。
四、参数优化与系统设计1. 参数优化方法MATLAB Simulink还提供了多种参数优化算法,可以通过这些算法对系统模型进行优化。
可以通过设置优化目标和参数范围,以及定义参数约束条件等,来进行参数优化计算。
2. 系统设计方法Simulink还支持用于控制系统、信号处理系统和通信系统等领域的特定设计工具。
通过这些工具,可以对系统模型进行控制器设计、滤波器设计等操作,以满足系统性能要求。
simulink建模与仿真
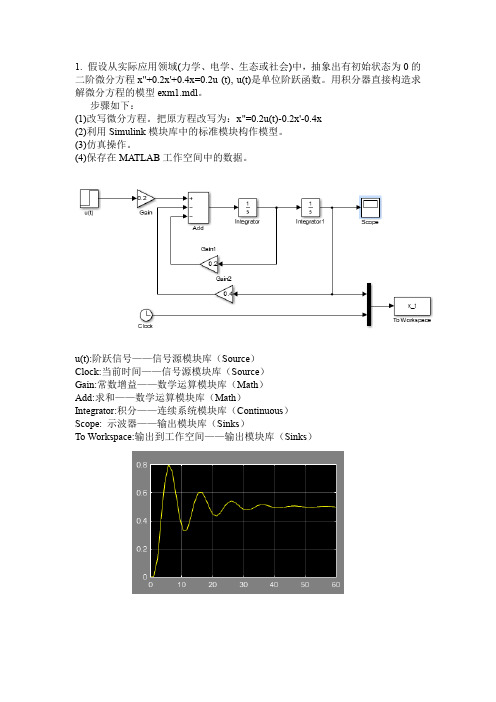
1. 假设从实际应用领域(力学、电学、生态或社会)中,抽象出有初始状态为0的二阶微分方程x"+0.2x'+0.4x=0.2u (t), u(t)是单位阶跃函数。
用积分器直接构造求解微分方程的模型exm1.mdl。
步骤如下:(1)改写微分方程。
把原方程改写为:x"=0.2u(t)-0.2x'-0.4x(2)利用Simulink模块库中的标准模块构作模型。
(3)仿真操作。
(4)保存在MATLAB工作空间中的数据。
u(t):阶跃信号——信号源模块库(Source)Clock:当前时间——信号源模块库(Source)Gain:常数增益——数学运算模块库(Math)Add:求和——数学运算模块库(Math)Integrator:积分——连续系统模块库(Continuous)Scope:示波器——输出模块库(Sinks)To Workspace:输出到工作空间——输出模块库(Sinks)2. 建立二阶系统222)(n n nS S S G ωςωω++=的脉冲响应模型,设ωn=10Hz ,观察当0<ζ<1、ζ=0、ζ=1及ζ>1时系统的响应。
Pulse Generator :脉冲发生器——信号源模块库(Source )Transfer Fun :传递函数——连续系统模块库(Continuous )Scope :示波器——输出模块库(Sinks )ζ=0.2 ζ=0ζ=1 ζ=53.皮球以15米/秒的速度从10米高的地方落下,建立显示球弹跳轨迹的模型。
Gravity:常数——信号源模块库(Source)IC Elasticity:信号的初始值——信号与系统模块库(Signal&Systems)Gain:常数增益——数学运算模块库(Math)Velocity:积分——连续系统模块库(Continuous)Position:有上下边界的有限积分——连续系统模块库(Continuous)Scope:示波器——输出模块库(Sinks)4. 利用使能原理构成一个正弦半波整流器。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
《通信系统仿真》实验报告
姓名杨利刚班级A0811 实验室203 组号28 学号28 实验日期
实验名称实验三Simulink建模与仿真实验成绩教师签字
一、实验目的
1、了解simulink的相关知识
2、掌握Matlab/simulink提供的基本模块库和常用的模块
3、掌握simulink建模仿真的基本方法
二、实验原理
Simulink是MATLAB中的一种可视化仿真工具,是一种基于MATLAB的框图设计环境,是实现动态系统建模、仿真和分析的一个软件包,被广泛应用于线性系统、非线性系统、数字控制及数字信号处理的建模和仿真中。
Simulink可以用连续采样时间、离散采样时间或两种混合的采样时间进行建模。
它也支持多速率系统,也就是系统中的不同部分具有不同的采样速率,并且提供了交互式图形化环境和可定制模块库来对其进行设计、仿真、执行和测试。
Simulink基本库是系统建模中最常用的模块库,原则上一切模型都是可以由基本库中的模块来构建,为了方便专业用户使用,Simulink还提供了大量的专业模块库,如为通信系统和信号处理而提供的CDMA参考库、通信模块库和DSP模块库等,但是,建议初学者不宜过多使用这些专业库,而应当从所建摸的系统原理入手,利用基本模块来构建系统,以深入理解系统运行情况。
Simulink的常用库模块有12个:
(1)连续时间线性系统库;(2)非连续系统库;(3)离散系统库;(4)查表操作模块;(5)数学函数库;(6)模型检查和建模辅助工具;(7)端口和子系统;(8)信号路由库;(9)信号属性转换库;(10)信号源库;(11)信宿和仿真显示仪器库;(12)用户自定义函数库。
Simulink的建模主要是子系统的建模,子系统建模完成后,再对其进行封装,即完成了一个基本模型的建立。
三、实验内容
1、现有对RLC充放电电路进行仿真的模型。
请参照仿真模型,进行Simulink的建模仿真,相关参数按照例题中的参数设置。
建模仿真过程:
1)在Matlab命令窗口中输入:simulink,启动simulink模型窗口2)建立模型
3)设置参数
仿真模型:
运行结果:
实验结论:
对同一个问题,不同的建模方式不影响实验结果(或者是会影响用算速度和精度,但本程序看不出来)。
四、实验报告
通过分析实验结果可知:
对于同一个问题,建模方式可以有很多种,他们的结果总体趋势都是相同的,细节方面可能不同。