五相逆变器的空间矢量PWM控制
五相电压源逆变器的空间矢量脉宽调制方法研究
第34卷第18期中国电机工程学报V ol.34 No.18 Jun.25, 20142014年6月25日Proceedings of the CSEE ©2014 Chin.Soc.for Elec.Eng. 2917 DOI:10.13334/j.0258-8013.pcsee.2014.18.007 文章编号:0258-8013 (2014) 18-2917-09 中图分类号:TM 301五相电压源逆变器的空间矢量脉宽调制方法研究高宏伟,杨贵杰,刘剑(哈尔滨工业大学电气工程及自动化学院,黑龙江省哈尔滨市 150001)Research of Space Vector PWM Techniques for Five-phase Voltage Source InverterGAO Hongwei, YANG Guijie, LIU Jian(School of Electrical Engineering and Automation, Harbin Institute of Technology, Harbin 150001, Heilongjiang Province, China)ABSTRACT: To improve the DC bus voltage utilization of five-phase voltage source inverter (VSI) and reduce the harmonic component of output phase voltages, a space vector pulse width modulation (SVPWM) algorithm of five-phase VSI based on adjacent four voltage vectors was proposed. According to the value of modulation index, the modulation range could be divided into sine modulation region and non-sine modulation region. In sine modulation region, the output phase voltages are standard sine waves without any harmonic component through allocating the action time of space vector appropriately. In non-sine modulation region, through optimizing the voltage vector in harmonic subspace, not only the DC bus voltage utilization is improved effectively, but also the harmonic component of output phase voltages is minimized. Simulation and experimental results verify the correctness and feasibility of the proposed algorithm.KEY WORDS: permanent magnetic synchronous motor (PMSM); five-phase voltage source inverter (VSI); space vector pulse width modulation (SVPWM); harmonic analysis; modulation index摘要:为提高五相电压源逆变器(voltage source inverter,VSI)的直流母线电压利用率,减少输出相电压中所含的谐波分量,提出一种改进的基于最近四矢量的五相VSI空间矢量脉宽调制算法。
基于SVPWM五相三电平H桥逆变器中点电位控制研究
( v mmadC l g , nig2 3 , hn ) Na yCo n ol e Naj 0 6 C ia e n 1 0
Ab ta t A 如 te v -h s relv l B i eiv r r ten mb ro so tu otg e tr o sr c: s h e a et e — e rd e t , h u e i up t l ev cosi s i f p h e H- g n e ft v a s hg a h r p l et dt n l V iht ti a dt apy t r io a PWM lo i m meh d I hs a e asm l e V h t o h a i S ag r h to n ti p p r ip i d S PWM t , i f ag rtm s i bet h v -h s h e— v lH B ig n etri p o o e . a e n teP a es i lo i ut l o te e a etrel e — r e iv r s rp sd B sd o h h s —h h a i f p e d e f
n url onfutain ip o oe et it cu t ,s rp sd ap l o
K e wo d : v - h s r e l v l H- i g v re ; ; W M ; a m o i s y r s f e- a et e ・e e ; ・ d e i e t r 5 i p h - Br n VP h r n c
出了一种 简化 的五相三 电平 H桥逆 变器 空间矢 量 P WM 算法 。该方 法采用 相移 S WM 思想 ,将 五相 三 电平 P
第二章阐述五电平逆变器的SVPWM控制
第二章阐述五电平逆变器的SVPWM控制。
介绍五电平逆变器的电路图及工作原理,并将SVPWM控制原理引入,实现SVPWM控制五电平逆变器。
针对五电平逆变器输出的同一个空间电压矢量存在多种开关状态,采用循边原则确定开关状态。
通过MATLAB仿真软件针对本文提出的控制算法进行仿真验证,并对结果进行详细的分析。
第三章阐述三相异步电机在各种坐标系下的状态空间方程以及矢量控制系统的基本原理,建立三相异步电机的矢量控制系统仿真模型。
第四章在介绍滑模变结构控制的设计及应用,包括滑模变结构控制的设计目标和设计方法、滑模变结构控制系统的不变性和抖振等问题基础上,讨论了交流异步电机矢量控制系统滑模变结构控制策略。
通过MATLAB仿真软件对本文提出的滑模变结构控制算法进行仿真验证,并对结果进行详细的分析。
理论分析和仿真结果均表明,这种控制算法改善了磁链观测的准确性,同时,还具有较强的抗负载扰动能力及对参数变化的鲁棒性。
五相svpwm,最近四矢量计算
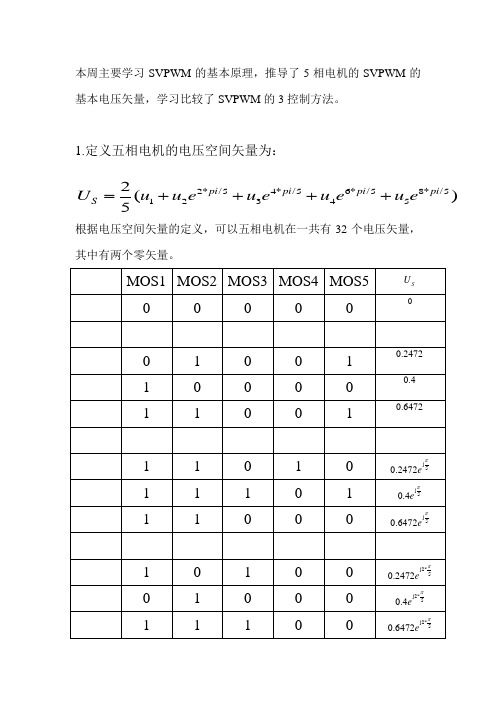
本周主要学习SVPWM 的基本原理,推导了5相电机的SVPWM 的基本电压矢量,学习比较了SVPWM 的3控制方法。
1.定义五相电机的电压空间矢量为:2*/54*/56*/58*/5123452()5pi pi pi pi SU u u e u e u e u e =++++根据电压空间矢量的定义,可以五相电机在一共有32个电压矢量,其中有两个零矢量。
MOS1 MOS2 MOS3 MOS4 MOS5 S U0 0 0 0 0 00 1 0 0 1 0.2472 1 0 0 0 0 0.4 1 1 0 0 1 0.64721 1 0 1 0 j50.2472e π 1 1 1 0 1 j 50.4eπ1 1 0 0 0 j50.6472eπ1 0 1 0 0 j2*50.2472e π 0 1 0 0 0 j2*50.4eπ111j2*50.6472eππ0 1 1 0 1 j3*50.2472eπ1 1 1 1 0 j3*50.4eπ0 1 1 0 0 j3*50.6472eπ0 1 0 1 0 j4*50.2472eπ0 0 1 0 0 j4*50.4eπ0 1 1 1 0 j4*50.6472e1 0 1 1 0 -0.2472 0 1 1 1 1 -0.4 0 0 1 1 0 -0.6472π0 0 1 0 1 j6*50.2472eπ0 0 0 1 0 j6*50.4eπ0 0 1 1 1 j6*50.6472eπ0 1 0 1 1 j7*50.2472eπ1 0 1 1 1 j7*50.4eπ0 0 0 1 1 j7*50.6472eπ1 0 0 1 0 j8*50.2472eπ0 0 0 0 1 j8*50.4eπ1 0 0 1 1 j8*50.6472eπ1 0 1 0 1 j9*50.2472eπ1 1 0 1 1 j9*50.4eπ1 0 0 0 1 j9*50.6472e1 1 1 1 1 0下图为五相电机电压矢量分布图2.五相电机共有电压空间矢量图是由三个正十边形组成2.1最外围的十边形:幅值最大,相邻开关只有一相不一 样,2/3模式(上桥臂2相导通,下桥臂三相关断,或者上桥臂三相导通,下桥臂两相关断)。
五相三电平逆变器空间矢量PWM控制研究

00 2 02
U 一吾( + 肋学 + 。 e
上 , 出一种简单实 用的 电压空间矢量 P 提 WM 控 制 算 法 , 通 过 仿 真 实 验 对 该 控 制算 法 进 行 了 验 并
证 .
关 键 词 : 相 三 电平 逆 变 器 ;VP 五 S WM ; 磁 同 步 电 机 永 中图法分类号 :M44 T 6
0 引
言
进行 了验 证.
多 相 交 流 电机 相 比三相 电机 三 电平 逆 变器 的 空 间 电压 矢 量 分 析
三 电平 供 电五相永 磁 同步电动机 调 速系统 如
图 1所示 .
转 矩脉 动频 率 , 降低转 矩脉 动 幅值之 外 , 还因为 总
输 出 电流 的增加 而 提高 了整个 变流 调速 系统 的输 出功率 [. 外 , 1此 ] 增加 相数 还有 利 于提 高低 速 区 的 调 速 特性 及 容 错 性 能[ . 容 量 多 相 交 流 电机 为 2大 ]
l0 O 1 22
一
UO D
:
— — D — U
L) ( 4
0 1I 02
IO X E
:
— D — — U
L () 5
O0 2 22
五 相 电压 合成 的空间 电压 矢量 可 以表示 为
【【 2 l¨ 2
、
2㈨ r … 一… ~ , 1 2 002 … 一’ 20 2 02
Vo . O No 5 13 . OC .2 0 t 06
五 相 三 电平 逆 变 器 空 间矢 量 P WM 控 制研 究 *
宋 庆 国 张 晓 锋 于 飞 张成 胜
( 军 工 程 大 学 电气 工 程 系 海 武汉 403) 30 3
新型五电平逆变器三维PWM控制
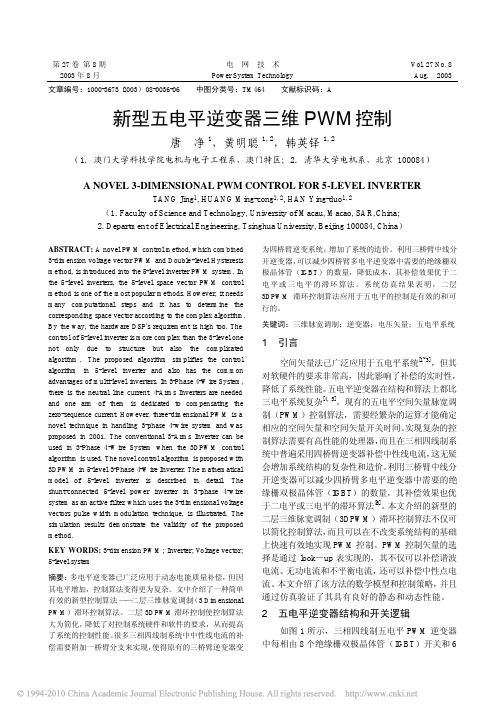
表2 等效电路对应的开关逻辑 table according to equivalent circuit
Sx 2 1 0 −1 −2 S1x 1 0 0 0 0 S2x 0 1 0 0 0 S3x 0 0 0 1 0 S4x 0 0 0 0 1 S5x 0 0 1 0 0
在 3DPWM 滞环控制算法中,电流差值都是在 α-β-0 坐标下,所以电压首先要进行坐标变换,即从 a-b-c 坐标系变换为 α-β-0 坐标系。假设直流电压相 等,即 U1 = U 2 = U 3 = U 4 = 1 2 U dc ,根据开关函数, 在 α-β-0 坐标系下的瞬时电压矢量可表示为 2 1 1 U s = U dc i S a − S b − S c + 2 2 3 1 1 j (S b − S c ) + k (S a + S b + S c ) (5) 2 3 进一步简化为
(1.澳门大学科技学院电机与电子工程系,澳门特区;2.清华大学电机系,北京 100084)
A NOVEL 3-DIMENSIONAL PWM CONTROL FOR 5-LEVEL INVERTER
TANG Jing1, HUANG Ming-cong1, 2, HAN Ying-duo1, 2 (1. Faculty of Science and Technology, University of Macau, Macao, SAR, China; 2. Department of Electrical Engineering, Tsinghua University, Beijing 100084, China)
表1 Tab. 1
Sx1 Sx2 Sx3 Sx4 Sx5 Sx6 Sx7 Sx8 +2Udc 1 1 1 1 0 0 0 0 S1a
电压空间矢量PWM(SVPWM)控制技术
高压直流输电(HVDC)
适用于高压直流输电系统的电压调节 和电流控制。
电机控制
用于无刷直流电机(BLDC)、永磁 同步电机(PMSM)等电机的控制。
不间断电源(UPS)
用于不间断电源系统的电压调节和能 量转换。
智能电网
用于智能电网中的分布式电源接入和 能量调度。
电压空间矢量PWM(SVPWM)的特点
高电压输出
高效节能
易于数字化实现
降低谐波干扰
能够实现高电压的输出, 适用于高压直流输电
(HVDC)等应用场景。
通过优化PWM脉冲宽度 和角度,实现更高的电 压输出和更低的损耗。
基于数字信号处理(DSP)等 数字技术,实现SVPWM算法
的快速计算和控制。
通过优化PWM脉冲的形 状和角度,降低对电网
电磁干扰
SVPWM控制技术产生的 电磁干扰较小,对周围环 境的影响较小。
04
电压空间矢量 PWM(SVPWM)控制优 化策略
电压空间矢量分配优化
考虑电机参数
根据电机的具体参数,如电感、 电阻等,优化电压空间矢量的分 配,以提高控制精度和响应速度。
降低谐波影响
通过优化电压空间矢量的分配,降 低PWM控制过程中产生的谐波, 减小对电机和整个系统的负面影响。
电压空间矢量 PWM(SVPWM) 控制技术
目录
• 电压空间矢量PWM(SVPWM)技 术概述
• 电压空间矢量PWM(SVPWM)控 制算法
• 电压空间矢量PWM(SVPWM)控 制性能分析
目录
• 电压空间矢量PWM(SVPWM)控 制优化策略
• 电压空间矢量PWM(SVPWM)控 制技术发展趋势
电流输出精度
逆变器供电感应电机新型空间矢量PWM控制方法
清华大学学报(自然科学版)17/27 1997年第37卷J o urnal of T sing hua U niv ersity (Sci&Tech)第1期第69~73页 逆变器供电感应电机新型空间矢量PWM 控制方法瞿文龙, 黄斐梨, 王耀明清华大学电机工程与应用电子技术系,北京100084 收稿日期:1995-11-20 第一作者:男,1946年生,副教授文 摘 讨论了电压空间矢量PW M 控制的几种不同组合方式。
分析了每种组合方式下的谐波电流,电机谐波转矩和谐波损耗。
给出了比较曲线和实验波形。
为不同应用场合下选择不同的空间矢量PW M 控制方法提供了依据。
组合方式3为在逆变器—感应电动机系统中的最优PW M 控制方式。
此方法的优点是器件的开关损耗低,而且在调制系数较高时,电机电流的谐波含量少,由其引起的电机谐波损耗低、转矩脉动小。
理论分析和实验结果证实了控制方法的有效性。
关键词 空间矢量;PW M 控制;谐波电流;开关损耗分类号 T M 346在B JT 逆变器供电的感应电机变频调速系统中,目前普遍应用的是结构简单、控制容易、运行可靠的PW M 硬开关逆变器。
为充分利用PW M 硬开关所能达到的开关频率,众多学者对PW M 控制方法进行了深入的研究,力求在尽可能低的开关频率下获得良好的逆变器输出电流波形。
近些年来提出的空间矢量PW M 方法[1]具有直流电压利用率高,电流畸变率低,便于微机实现等优点。
尤其是空间矢量PW M 方法有规律地加入零矢量,其平均开关频率比的减少了近1/3。
本文将在空间矢量PWM 技术的基础上,比较分析几种不同的矢量组合方式,提出一种既降低开关损耗又减少电机电流谐波含量的控制方法,并给出了实验样机的实验结果。
1 空间矢量的组合方式图1为电压型逆变器供电的感应电机变频调速系统示意图。
图中,逆变器三个桥臂中功率器件的开关状态分别用三个单刀双掷开关状态S A ,S B ,S C 表示。
电压空间矢量PWM控制
文章编号:1009-0193(1999)04-0086-05电压空间矢量(磁链追踪)PWM控制研究与仿真翁颖钧,吴守箴(上海铁道大学电气工程系,上海200331)摘要:为了提高电机的功率因数,降低开关损耗,基于气隙磁通控制原理,以电压矢量组合来逼近圆形磁链轨迹,而电压矢量的选择对应不同开关模式,因此构成电压矢量控制PWM逆变器。
利用C语言仿真,该法输出电压较一般SPWM 逆变器提高15%,每次状态切换只涉及一个元件,开关损耗降低,且模型简单,适用于各种PWM调速装置。
关键词:电机;空间矢量;PWM控制中图分类号:TM301.2 文献标识码:A1 基本原理由电机学可知,在由三相对称正弦电压供电时,电机的定子磁链的幅值是恒定的,并以恒速ω1旋转。
磁链矢量顶端运动轨迹形成圆形的空间旋转磁场(简称磁链圆),我们可以用定子磁链的矢量式来表述:式中,λm 为的幅值,ω1为旋转角速度。
当转速不是很低时,定子电阻压降较小,可以忽略不计,则定子电压与磁链的近似关系可表示成:上式表明,电压矢量V1的大小等于λ1的变化率,而其方向则与λ1的运动方向一致。
由式(1),(2) 可得:由(3)式可见,当磁链幅值λm 在运动过程中一定时,的大小与ω1(或供电电压频率f1)成正比,其方向为磁链圆轨迹的切线方向。
当磁链矢量在空间旋转一周时,电压空间矢量也连续地按磁链圆的切线方向运动经过2π弧度,其轨迹与磁链圆是重合的。
这时,我们就把气隙旋转磁场的轨迹与电压空间矢量联系起来。
从三相逆变器—异步电机原理图(见图1)可知,为了使电动机对称工作,必须三相同时供电,从逆变器的拓扑结构以及式(2)来看,每个输出电势Vao ,Vbo,Vco都具有二个值,例如±Vd/2,如此线性组合即可得到矢量23=8种电压类型。
图(2)表示了电压空间矢量的放射状分布。
每个矢量标注了0(000)~7(111),0表示同一桥臂的二个晶闸管的下面一个导通,1表示上侧的导通,k表示对应二进制数的十进制数。
空间矢量PWM方法_56640165
0 ≤ γ < 30 30 ≤ γ < 90 90 ≤ γ < 150 150 ≤ γ < 210 210 ≤ γ < 270 270 ≤ γ < 330 330 ≤ γ < 360
空间矢量PWM方法与磁链轨迹控制
1.2
空间矢量PWM方法与磁链轨迹控制
1.0
空间矢量PWM优点:
0.8
0.6
0.4
0.2
空间矢量PWM方法与磁链轨迹控制
空间矢量PWM方法与磁链轨迹控制
电压空 开关状 U相电 V相电 W相电 矢量表 间矢量 态 压 压 压 达式 0 0 0 0 V0 000 1 1 2 2 − U − U U U e V1 001 3 3 3 3 2 1 1 2 U − U − U U e V2 010 3 3 3 3 2 2 1 1 U e − U U U V3 011 3 3 3 3 2 2 1 1 U e − U − U U 3 V4 100 3 3 3 1 2 1 2 U U e U − U 3 3 V5 101 3 3 1 1 2 2 U U − U U e 3 3 3 3 V6 110 0 0 0 0 V7 111
从减少与设定磁链轨迹误差的角度考虑可将矢量 作用时间分段 从开关次数的角度考虑插入零矢量的选择
磁链轨迹
B V2t1/2 V0t0/4
V6t2/2 V2t1/2 A V0t0/4 V6t2/2 V7t0/2
七段式SVPWM开关状态变化图
空间矢量PWM方法与磁链轨迹控制
空间矢量PWM方法与磁链轨迹控制
空间电压矢量
)T
V obj T = V 2 t1 + V 6 t 2
式中α为调制比,它反映逆变器的电压利用系数 V obj V obj V obj a = = = 2 V 2 V 6 U dc 3 思考题:如何实现V/f恒定控制?什么情况下会出现畸变?和 SPWM有什么关系?
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第25卷第9期中国电机工程学报V ol.25 No.9 May 20052005年5月Proceedings of the CSEE ©2005 Chin.Soc.for Elec.Eng. 文章编号:0258-8013 (2005) 09-0040-07 中图分类号:TM464 文献标识码:A 学科分类号:470⋅40五相逆变器的空间矢量PWM控制于飞,张晓锋,李槐树,宋庆国(海军工程大学电气工程系,湖北省武汉市 430033)SPACE VECTOR PWM CONTOR OF FIVE-PHASE INVERTERYU Fei,ZHANG Xiao-feng,LI Huai-shu,SONG Qing-guo(Department of Electrical Engineering,Naval University of Engineering,Wuhan 430033,Hubei Province,China)ABSTRACT: The space vector PWM (SVPWM) control of multi-phase inverter has more flexibility for the additional voltage vectors. According to vectors analyzing, the advantages of multi-phase inverter SVPWM control is presented in this paper. Two new SVPWM control methods for five-phase inverter are proposed comparing to the traditional Near Two Vectors SVPWM (NTV-SVPWM) control, and here they are called Near Four Vectors SVPWM (NFV-SVPWM) control and Minimum Switch Loss SVPWM (MSL-SVPWM) control. The target voltage functions and waveforms of three kind of SVPWM are deduced and compared. The conclusions can be drawn that there are much low frequency harmonics with NTV-SVPWM control, and which is not suitable for multi-phase inverter control; NFV-SVPWM has the best harmonics performance and is fit for low modulation index operation; MSL-SVPWM has the lowest switching loss and is fit for high modulation index operation. MATLAB is adopted to simulate the five-phase variable speed system, and the simulation results validate the conclusions above.KEY WORDS: Electric machimery and elcectratechlogy;Five-phase inverter;Near two vectors SVPWM;Near four vectors SVPWM;Minimum switch loss SVPWM摘要:多相逆变器由于电压矢量的增加,其空间矢量PWM (SVPWM)控制同三相电机相比具有更大的灵活性,文中通过对五相逆变器电压矢量空间的分析,认为多相逆变器空间矢量PWM控制的线性调制范围及形成的电机定子磁通要优于三相电机。
根据五相逆变器的结构特点,在传统的最近两矢量SVPWM(NTV-SVPWM)控制的基础上,提出了两种新的五相逆变器SVPWM控制方式:最近四矢量SVPWM(NFV-SVPWM)控制和最小开关损耗SVPWM (MSL-SVPWM)控制。
推导了3种控制方式下的目标输出电压函数及波形,通过对比分析,认为:NTV-SVPWM 控制含有较大的低次谐波,不适宜用于多相控制;NFV-SVPWM控制的输出谐波最小,MSL-SVPWM控制的开关损耗最小,分别适用于低调制指数和高调制指数工作区。
利用MATLAB对五相同步电机调速控制系统进行了仿真研究,仿真结果验证了上述结论。
关键词:电机电工;五相逆变器;最近两矢量SVPWM;最近四矢量SVPWM;小开关损耗空间SVPWM1 引言多相交流电机(多于三相)作为变频调速电机的优点已得到公认。
除了增加转矩脉动频率,降低转矩脉动幅值之外,还因为总输出电流的增加而提高了整个变流调速系统的输出功率,对变流器功率器件的容量要求也降低了。
此外,增加相数还有利于提高低速区的调速特性。
容错性能好也是这类电机的一个特点,当多相中的一相或几相发生故障时,通过适当的控制,电机仍可以降功率启动和运行[1]。
多相电机由多相逆变器来驱动,二者与控制器一起构成完整的多相变频调速系统,这类系统中最典型的代表是五相变频调速系统(见图1)。
Hamid A. Toliyat等人对这种系统进行了大量的研究,分析了这类系统的控制方法和图1五相电机调速控制系统电路示意图Fig. 1 Scheme of five-phase motor variable speed第9期 于 飞等: 五相逆变器的空间矢量PWM 控制 41运行特性[2-5],其中文献[4]提出了五相逆变器的空间矢量PWM (SVPWM )控制方法,但是这种方法只是三相系统SVPWM 控制方法[6-7]的简单应用,本文经分析证明,这种方法输出的逆变器电流含有较大的低次谐波。
本文在对五相系统的电压空间矢量进行详细分析的基础上,提出了适用于五相逆变器SVPWM 控制的两种新方法,可以显著降低逆变器输出谐波,并减小开关损耗。
2 五相逆变器的空间电压矢量分析设五相逆变器的开关函数为S =[S a , S b , S c , S d , S e ],若S a =1,则表示逆变器a 相桥臂上开关导通,下开关关断;若S a =0则反之,其它各开关函数类似。
则逆变器各相输出电压可以分别表示为U a =S a U D ;U b =S b U D ;U c =S c U D ;U d =S d U D ;U e =S e U D 。
因此五相同步电机的电压空间矢量可以定义为j72j144j216j288D a b c d e 2(e e e e )5k U S S S S S °°°°+=+++U (1)根据上述定义,经计算一共可以得到32个电压矢量,其空间分布见图2。
这些矢量分成4组,其中大、中、小矢量各10个,形成3个边长不同的正10边形,另外有0矢量2个。
图中每个电压矢量所对应的5位二进制是该矢量的开关函数,表示此时逆变器的工作状态;电压矢量的下标表示二进制数所对应的十进制数。
6图2 五相逆变器电压空间矢量的空间分布Fig.2 Voltage vectors distribution of five-phase inverter进一步研究各矢量对应的开关状态可以发现:大、中、小3种幅值的有效矢量分别对应着五相逆变器的3种工作状态,即2/3工作方式、1/4工作方式和伪2/3工作方式。
所谓2/3工作方式是指在某一瞬间,逆变器上桥臂有两相导通,下桥臂有三相导通或反之,而且上桥臂(或下桥臂)导通的相都相邻,这样会使合成的电压矢量最大,对应电机来说则会使形成的定子磁通更大。
1/4工作方式与之类似,只是形成的电压矢量要小些。
伪2/3方式与2/3方式的区别是其上或下桥臂同时导通的三相不都相邻,中间插有不导通的相,这种情况会造成电压矢量方向不一致或定子磁通互相抵消,因此应避免使用。
由图2可见,多相电机电压矢量的数量和分布都比三相系统要复杂的多,但是这也带来了一些优点。
定义SVPWM 控制方式下逆变器的调制指数为refLU m U =(2) 式中 ref U 为参考电压矢量的幅值;L U 为幅值最 大的电压空间矢量的幅值,这在电压矢量分布图中可以表示为最大正多边形的内切圆半径与外接圆半径之比,因此m 又可以写成下列形式:in outRm R = (3)则三相逆变器的调制指数为:three 0.8660m =,而五相逆变器的最大调制指数为:five 0.9512m =, 比三相电机大9.82%,高的调制指数意味着更大的线性调制范围和更高的直流母线电压利用率[8],这是多相电机SVPWM 控制的一个优点。
另外,五相电机的电压空间矢量是正十边形,形成的定子磁通比三相电机的正6边形更接近于圆形,因此可以减小转矩脉动。
这是多相电机SVPWM 控制的另一个优点。
3 最近两矢量SVPWM (NTV-SVPWM )控制为了分析方便,把逆变器的电压空间矢量标记成图3的形式。
L U 9L图3 大矢量与中矢量的空间分布Fig.3 Space distribution of large vectors and middle vectors42 中 国 电 机 工 程 学 报 第25卷根据图3,相邻两个大矢量的开关状态只有一位不同,他们进行切换的时候只有一相开关发生动作,与三相系统的情况相同,因此可以沿用三相SVPWM 的控制思路,当参考矢量位于发某一扇区时,选择与其相邻的两个大矢量和零矢量对其合成。
10个大矢量可以表示为 1j(1)5e k k L U −π=U , 1, 210k =" (4)式中 22[12cos()]55L D U U π=+,为大矢量的幅值。
参考矢量可表示为j ref ref e t U ω=U ,设在一个开关周 期T s 内第k 个大矢量持续时间为T k ,第 k+1个大矢量持续的时间为T k +1,则在每个扇区内有下列方程成立:ref 11s k k k k T T T ++=+U U U 10s k k T T T T +=++可以解得ref sin(/5)sin(/5)k s L U k t T T U ωπ−=⋅π (5) ref 1sin((1)/5)sin(/5)k s L U t k T T U ω+−−π=⋅π (6) 01s k k T T T T +=−− (7)这种控制方式下,在第一个扇区内的矢量作用顺序及输出PWM 波形见图4。