简单介绍一下半导体工厂AMHS系统的搬运机器人
晶圆机器人是什么用途

晶圆机器人是什么用途晶圆机器人是一种专门用于半导体行业的机器人。
它的主要用途是在半导体生产过程中,完成晶圆的运输、摆放、检测、清洁等工作,以提高生产效率和产品质量。
首先,晶圆机器人可以实现晶圆的自动运输和摆放。
在半导体生产过程中,晶圆是一种非常脆弱而昂贵的材料,需要进行精密的操作。
传统上,人工运输和摆放晶圆存在一定的风险,易受到人为因素的影响,同时也容易引入灰尘和污染等问题。
而晶圆机器人可以通过精确的坐标控制,快速、准确地将晶圆从一个工位运输至另一个工位,并将其安全地摆放在指定位置上。
其次,晶圆机器人还可以完成晶圆的检测工作。
在半导体生产过程中,对晶圆的质量进行检测是非常重要的,以保证半导体产品的品质。
晶圆机器人可以配备各种传感器和检测设备,如视觉传感器、厚度测量仪等,对晶圆进行自动化的检测。
这样可以大大提高检测效率和准确性,同时减少了人工操作的误差。
此外,晶圆机器人还可以完成晶圆的清洁工作。
由于晶圆在生产过程中容易沾上灰尘、污染物等杂质,这些杂质会影响到晶体的形成和产品的质量。
传统的清洁方式通常是使用手工或半自动的方法,效率较低且难以保证清洁效果。
晶圆机器人可以配备各种清洁模块,如吹风、清洗喷嘴等,通过精确的控制和定位,能够对晶圆进行全面、高效的清洁。
这不仅提高了清洁效果,还减少了外界灰尘的进入,提高了产品的质量和稳定性。
此外,晶圆机器人还可以进行其他一些辅助工作。
例如,在晶圆生产过程中,需要对晶圆进行标识、封装、检修等操作,晶圆机器人可以协助完成这些工作,提高生产效率和工作质量。
同时,晶圆机器人可以在晶圆生产线的各个环节之间进行自动切换和调度,使整个生产过程更加连贯和高效。
综上所述,晶圆机器人在半导体行业中具有非常重要的作用。
它可以实现晶圆的自动运输和摆放、晶圆的检测和清洁,提高生产效率和产品质量。
同时,晶圆机器人还可以完成其他一些辅助工作,提高生产线的整体效率。
随着科技的发展和晶圆工艺的不断更新,晶圆机器人的应用前景将更加广阔,为半导体行业的发展提供强有力的支持。
大气侧晶圆搬运机械臂介绍

大气侧晶圆搬运机械臂介绍
大气侧晶圆搬运机械臂是一种用于半导体工业中晶圆的搬运和处理的机器人。
它由多个关节构成,可以在三维空间内自由移动和旋转,能够准确地抓取、搬运、放置晶圆等操作。
大气侧晶圆搬运机械臂通常由机械臂主体、控制系统、末端夹持器等部分组成。
机械臂主体一般采用轻质材料制造,以减少惯性和提高响应速度。
控制系统通常采用计算机控制,能够实现自动化控制和编程操作。
末端夹持器一般采用夹爪或吸盘等方式,能够稳定地抓取晶圆。
大气侧晶圆搬运机械臂广泛应用于半导体工业中的晶圆生产线上。
它能够提高晶圆的生产效率和质量,减少人为操作的误差,同时也能保证卫生和安全。
mm半导体工厂的AMHS系统
300mm半导体工厂的AMHS系统在半导体制造技术高度发达的今天,300mm的半导体工厂已经成为全球半导体行业的主流.由于300mm半导体生产线的巨额投入,人们不得不尽可能的挖掘300mm工厂的生产效率,以期得到更大的晶圆产出.一个功能强大且性能稳定的AMHS系统在300mm工厂里扮演了一个非常重要的角色.AMHS系统不仅可以有效的利用宝贵的洁净室的生产空间,并且还可以提高生产设备的利用率,缩短在制品WIP的Cycle Time,所以在很多的300mm 的半导体工厂里,AMHS都被视为可以快速提升产能,增加生产效率的尖兵利器. AMHS系统在300mm半导体工厂的应用特点和200mm晶圆相比,更大的晶圆尺寸使得单批Lot的晶圆重量变得更大,仅凭在200mm工厂Intrabay内的人工搬运已经远远无法满足300mm工厂的生产要求.因此,在300mm 的半导体工厂里,生产方式的巨大变化也给AMHS系统提出了更高的要求.搬送方式的巨大进化首先,是AMHS搬送方式从200mm工厂的SEMI Auto方式到300mm工厂Full Auto方式的转变.如图1红色轨道所示:在200mm工厂所采用的Semi Auto 生产方式中的Wafer搬送,只包括中央区域Interbay的AMHS搬送.而Wafer到生产设备的部分需要人工搬送来完成.而在300mm工厂里,由于wafer自身重量的增加,导致人工搬送异常困难,故由AMHS系统取而代之直接将wafer 搬送到生产设备,如图1中的蓝色轨道,这即是Full Auto 的作业方式.这种方式极大减轻了生产一线操作人员的工作强度,同时又避免了因人为事故而造成的损失.更为重要的是,在工厂产能迅速提升的过程中,可以满足大规模搬送量的AMHS系统的巨大优势可以完全呈现.其次,是Tool To Tool直接搬送的全厂性应用.为了进一步的节省FOUP的搬送时间,300mm晶圆厂的AMHS系统必须支持Tool To Tool的直接搬送.这种搬送模式可以使得FOUP不必经过存储设备Stocker的中转,而直接从上一站的加工设备搬送到下一站的加工设备.如图1所示:在没有Tool To Tool直接搬送的工厂内,从Tool A到Tool B的搬送路径为ToolA→Stocker01—>Stocker02→Tool B.但是在具备Tool To Tool直接搬送功能的工厂内,如图2所示,从Tool A到Tool B的搬送路径为Tool A→Tool B.为了实现这种Tool To Tool的搬送功能,在AMHS系统设计的时候,必须要考虑到Interbay和Intrabay的整合,工厂布局,搬送车辆和Stocker的选择等多种因素.AMHS系统整体性能的要求稳定性:由于全厂都在大规模地应用AMHS系统进行Wafer 的搬送,所以一旦AMHS系统发生故障将导致全厂性的生产设备因没有可供生产的Wafer而停止生产,进而严重影响正常的生产运营.考虑到在300mm半导体工厂内,AMHS 系统的稳定性将直接关系到工厂的生产效率,工厂的管理者对于AMHS系统稳定性也提出了极其苛刻的要求.高效性:与200mm半导体工厂的AMHS系统相比,300mm工厂的AMHS搬送量有了十倍以上的增长.在面对巨大搬送量的时候,如何确保全厂的搬送效率,在更短的时间内完成Wafer的搬送,对于AMHS系统而言是一个巨大的挑战.同时,AMHS系统搬送效率的高低,也将直接影响到生产设备的利用率,故在300mm半导体工厂的搬送时间都是以秒为单位进行计算,且每一秒钟的减少,都需要付出更多的精心设计才可实现.最大化的利用生产空间在300mm工厂的生产车间内,洁净室的空间是极其昂贵的.而AMHS系统为了解决生产线上所有在制品WIP的存储保管问题,不得不占用大量的面积和空间.如何在满足存储和搬送要求的前提下,最大化的节省所占用的面积空间,是AMHS系统必须面对的一个难题.在200mm半导体工厂的AMHS系统中,为了尽可能的利用洁净室的面积,提高单位占地面积的Wafer存储量,比较经常采用的方式是提升Stocker中央区域的天花板高度,并采用更高的Stocker型号,这种方式一般可以增加20%~30%的wafer存储量.在300mm半导体工厂的AMHS系统中,比较常用的方式是使用UTSUnder Track Storage,一种可以将Wafer存放在天花板下方空中的装置,由于UTS可以不占用洁净室的地面面积,有效地利用了洁净室的空中区域,所以这种解决方案在300mm半导体工厂里的应用非常广泛,如图3所示.AMHS系统的柔性设计在300mm半导体工厂内,搬送轨道遍布整个车间,构成了巨大且复杂的网络拓扑结构.虽然单个车辆个体或单一合分流的节点发生故障,对于轨道控制系统不会产生大的影响,但是这种单点故障若发生在交通繁忙的路段,或者较长时间不能解决的时候,将会产生严重的交通拥塞,并导致整体搬送效率急速下降,从而影响到整个工厂的生产.因此,300mm的AMHS轨道控制系统必须具备故障自我侦测和自我调整的柔性特点.当某单一的轨道节点发生故障,轨道控制系统可以自动调节系统的运行参数,动态响应故障激励,及时调整所有搬送车辆的运行路线,并通知系统管理人员进行紧急故障处理等功能.AMHS系统的性能分析和影响因素由于AMHS系统属于较复杂的多元非线性系统,传统的控制理论很难对其进行准确的分析和性能优化.为了对AMHS系统进行优化改善,首先需要确定可以准确反映AMHS系统性能的指标参数,并在此基础上对那些关键性因素进行模拟分析得出优化方向,进而在AMHS系统的实际运行中加以验证,从而得到预期的优化效果.分析AMHS系统性能的重要指标在对AMHS系统进行性能分析的时候,一般会从以下两个方面进行判断:稳定性:MTBF 和MTTR是在衡量系统稳定性方面最常用到的两个参数.MTBFMean Time Between Failure表示系统硬件的故障频率,这个数据越低,表示系统的硬件越稳定,故障率越低.而MTTRMean Time To Repair表示系统硬件发生故障时候的修复时间,这个数据越低,表示系统硬件的可修复能力越高,可在线使用的能力越高.高效性:在衡量AMHS系统的搬送效率的时候,平均搬送时间和三西格玛的搬送时间是最常用到的两个指标.平均搬送时间是指在某单位时间段内完成的所有搬送任务的平均搬送时间,而三西格玛的搬送时间则是借用了统计学上的一个概念:即在三西格玛的搬送时间内完成的搬送任务的数量占到总体搬送量的三西格玛%.在Full Auto作业模式下的这两个指标将直接关系到生产设备能否保证较高的生产利用率,甚至会影响到Wafer的Cycle Time.因此,大部分300mm工厂的管理者对于这个性能指标都会设定极其严格的标准.影响AMHS系统搬送性能的主要因素通常,影响AMHS系统搬送性能的因素可以从AMHS系统的硬件特性和系统控制软件两方面去分析.首先,系统的硬件因素主要考虑以下几点:OHT行走速度和加速度:OHT的行走速度和加速度是影响AMHS系统整体运行效率的重要参数.更高的行走速度和加速度可以有效地降低单次搬送的时间;但是当AMHS系统的搬送任务过于频繁的时候,OHT本身会遇到经常性的临时停车,这个时候过高的速度和加速度反而会增加OHT车体本身的负担,加快OHT车体的磨损.因此,大部分的AMHS系统制造商都会根据实际情况设定最佳的行车速度,而不是盲目的追求更高的行走速度.OHT的升降马达的运行速度:OHT的升降马达主要是用来将FOUP从轨道高度的位置下降放置于生产设备的Port上或者反之将FOUP从设备的Port上传送到OHT上.因此,升降马达的运行速度也会影响AMHS系统整体的搬送时间,但考虑到生产设备操作人员的安全问题,升降马达的速度一般不会设置过高.轨道的设计和布局:轨道的设计模式和拓扑布局是影响AMHS系统搬送效率的关键因素.在设计轨道拓扑布局的时候,需要考虑到OHT行走路线的优化、最短路径的设计、轨道通行的冗余能力、OHT交汇路口的设计等问题.一个优秀的轨道布局设计,不仅可以缩短OHT的行走路程,还可以提高轨道整体的冗余能力,增加在单点发生故障时候轨道系统的健壮性.其次,系统的软件方面主要考虑以下几个因素:OHT行走路径的选择:OHT在出发至目的地之前需要确定最优的行走路线,以便尽可能的减少搬送时间.在分析比较各种不同行走路径的时候,通常需要考虑每条行走路径实际的行走距离;路途障碍物的数量;中途交汇路口的数量;路径中途有无单点故障发生等因素.同时,当OHT行走路径确定后出发的时候,如果有影响到路径选择的意外事件发生,OHT可以重新计算最优路径,并动态改变之前的行走路径.最佳OHT的搜索逻辑:OHT的搜索逻辑是用来确定当某一个站点有搬送请求发生的时候,AMHS系统如何选择最优的OHT来完成这个搬送任务.一般而言,如果仅仅认为只要是距离最近的没有任务的空车就是最优的OHT,那是不完全正确的.若考虑到更加复杂的情况,即当多个站点都发生了搬送请求事件的时候,如何确定多站点的最优OHT,并且加上允许改变之前有搬送指令的空车的搬送指令的条件,则需要一个复杂算法的帮助才能真正确定系统整体的最优选择.不过可惜的是,复杂算法通常会消耗控制系统大量的CPU资源,且更易导致控制系统的不稳定.故在实际工厂的应用中,无法确定对于系统整体搬送最优的OHT.轨道交通的控制逻辑:交通控制主要是解决在OHT行走至交汇路口时的优先通行问题.使排队等待通过交汇路口的所有OHT车辆有序且高效的通行是轨道交通控制最主要的目的.但在大部分情况下,考虑到控制程序的稳定性,设计人员通常仍会舍弃更为智能化的控制逻辑而采用逻辑简单容易操作的交通控制程序.AMHS系统所面临的挑战和未来的发展趋势在2007 SEMICON Taiwan的高峰论坛上,TSMC发表了未来五年内建设启用450mm半导体工厂的豪言壮语.随着更多的半导体制造商的积极投入,450mm半导体工厂似乎将不再遥远.到那时,AMHS系统在450mm半导体工厂的生产过程中将发挥更加重要的作用,同时也会面临更为严峻的挑战.AMHS系统的使用者和管理人员提出的每一个近乎于苛刻的要求,对于AMHS系统的设计开发人员来说,都将是技术进步的动力来源和未来的挑战方向.1在450mm半导体工厂内,虽然Wafer尺寸仅仅增加倍,但Wafer重量却增加倍.为了适应重量更重的Wafer的搬送,AMHS的制造商将不得不对OHT的负载能力,轨道强度,厂房结构等多方面进行重新计算评估,并相应的提高AMHS 系统的硬件性能.2对于尺寸更大的Wafer,若采用传统Stocker的存储方式,必将浪费更多的洁净室空间.因此,UTS系统对于洁净室地面面积零占用的特点必将受到半导体工厂的青睐.开发出性能稳定,存储量大的UTS系统,将是AMHS系统制造商的一个重要课题,也是在未来商业竞争中获胜的重要因素.3随着半导体工厂对AMHS系统依赖性的日益趋重,工厂管理者会越来越不能容忍AMHS系统任何情况下的停机:即使AMHS系统的底层参数更改,轨道硬件变更,控制系统的升级等工作都被要求在Online不停机的情况下完成.对于AMHS系统制造商而言,设计出永不停止的AMHS系统将成为必需.。
搬运机器人

简单介绍一下半导体工厂AMHS系统的搬运机器人fosb是wafer做好以后送给客户时用的盒子(因为AMD 采用了“前开口运装箱”(FOSB),这样就保证了在大多数加工制作过程中,晶片都是处于密封)。
foup是12寸厂内部生产线上的装lot的盒子(在台湾8吋SMIF晶圆盒(POD)的需求量约有新台币3~5亿元的市场,未来12吋SMIF晶圆盒(FOUP) 的需求量预估为每年6万个)。
在超净环境中,晶圆被密封在称作FOUP(front-opening unified pods)的容器中。
带有彩色编码的容器代表晶圆将进入不同的制程。
每个FOUP有一个序列号以识别晶圆,写得不好,请大家多多指教。
OHS(Over Head Shuttle )可以在安装在天井下轨道上高速移动的自动搬运装置。
一般是用于成膜、洗浄等各个保管设备间FOUP搬运。
OHT(Overhead Hoist Transfer )是安装在天井下轨道下高速移动的自动搬运小车。
由升降装置马达驱动BELT,使GRIPPER自动抓取设置在port的foup。
这是300mm晶圆厂运用最广泛的搬运工具。
GRIPPER有不同的类型可以搬运不同类型的foup。
从第一代10几年前只能低速走行单线轨道,移载设置于其正下方port的foup,到第二代可以高速走行在分歧轨道,第三代不仅可以走行在分歧轨道,还可以左右移载设置在STS,UTS上的FOUP,再到第四代450mm搬运小车,更新速度可谓非常之快。
中国国内半导体厂商使用第一代,第二代自动搬运小车,目前国内还没有使用第三代自动搬运小车的客户。
AGV (Automated Guided Vehicle)车上安装了多关节手臂机器人,用于搬运保管设备和制造设备之间的foup。
本搬运小车由于安装了大容量的电池,可以自动走行在工厂的地板上,并按照程序设置,可以走行比较复杂的路径。
台湾,韩国有半导体厂商很多使用这种小车的案例。
300mm半导体工厂的AMHS系统

300mm半导体工厂的AMHS系统在半导体制造技术高度发达的今天,300mm的半导体工厂已经成为全球半导体行业的主流。
由于300mm半导体生产线的巨额投入,人们不得不尽可能的挖掘300mm工厂的生产效率,以期得到更大的晶圆产出。
一个功能强大且性能稳定的AMHS系统在300mm工厂里扮演了一个非常重要的角色。
AMHS系统不仅可以有效的利用宝贵的洁净室的生产空间,并且还可以提高生产设备的利用率,缩短在制品WIP的Cycle Ti me,所以在很多的300mm的半导体工厂里,AMHS都被视为可以快速提升产能,增加生产效率的尖兵利器。
AMHS系统在300mm半导体工厂的应用特点ﻫ和200mm晶圆相比,更大的晶圆尺寸使得单批Lot的晶圆重量变得更大,仅凭在200mm工厂Intrabay内的人工搬运已经远远无法满足300mm工厂的生产要求。
因此,在300mm的半导体工厂里,生产方式的巨大变化也给AMHS系统提出了更高的要求。
搬送方式的巨大进化首先,是AMHS搬送方式从200mm工厂的SEMI Auto方式到300mm工厂FullAuto方式的转变。
如图1红色轨道所示:在200mm工厂所采用的Semi Auto生产方式中的Wafer搬送,只包括中央区域Interbay的AMHS搬送。
而Wafer到生产设备的部分需要人工搬送来完成。
而在300mm工厂里,由于wafer自身重量的增加,导致人工搬送异常困难,故由AMHS系统取而代之直接将wafer搬送到生产设备,如图1中的蓝色轨道,这即是FullAuto的作业方式。
这种方式极大减轻了生产一线操作人员的工作强度,同时又避免了因人为事故而造成的损失。
更为重要的是,在工厂产能迅速提升的过程中,可以满足大规模搬送量的AMHS系统的巨大优势可以完全呈现。
其次,是ToolTo Tool直接搬送的全厂性应用。
为了进一步的节省FOUP的搬送时间,300mm晶圆厂的AMHS系统必须支持Tool To Tool的直接搬送。
工业机器人在半导体行业的晶圆搬运与封装功能

工业机器人在半导体行业的晶圆搬运与封装功能工业机器人在半导体行业扮演着不可或缺的角色,其中晶圆搬运与封装功能尤为重要。
本文将详细探讨工业机器人在半导体行业中的应用,重点关注晶圆搬运与封装功能的优势和发展趋势。
第一部分:工业机器人在半导体行业的应用概述工业机器人是指专门用于执行某些重复性、危险性较高或复杂性较强任务的自动化机器人。
半导体行业作为现代科技产业的支柱之一,对高效、精确的晶圆搬运和封装过程有着迫切需求。
工业机器人的应用使得半导体生产线的自动化程度大大提高,生产效率和产品质量得到了显著提升。
第二部分:工业机器人在晶圆搬运方面的优势1. 精确搬运能力:工业机器人具有高精度的定位和运动控制能力,能够准确搬运晶圆,并将其安全地移动到指定位置。
2. 高效生产:工业机器人的快速响应和高速移动能力,使得晶圆搬运过程更加高效。
相比于人工搬运,机器人能够在更短的时间内完成更多的任务。
3. 自动化管理:通过与其他自动化设备的联动,工业机器人能够实现晶圆的自动装载和卸载,大大减少了人工操作所带来的差错和风险。
第三部分:工业机器人在封装过程中的应用封装是半导体生产中的一个重要环节,涉及到晶圆芯片的封装和密封。
工业机器人在封装过程中的应用主要有:1. 自动化封装:工业机器人可以实现晶圆芯片的自动装配,使得封装过程更加高效和准确。
2. 清洁性控制:工业机器人可以在封装过程中进行精确的清洁操作,确保封装过程的无尘环境,以保证产品的质量和稳定性。
3. 检测与排除:工业机器人可以执行晶圆封装后的自动化检测任务,筛选出不合格产品并及时排除,提高产品的出货率。
第四部分:工业机器人在半导体行业晶圆搬运与封装功能的发展趋势随着半导体技术的不断发展,工业机器人在半导体行业的应用也面临一系列的发展趋势:1. 精度和速度的进一步提升:未来的工业机器人将具备更高的精度和速度,以适应半导体行业对晶圆搬运和封装过程更高要求的需求。
2. AI和机器学习的应用:工业机器人将更多地应用AI和机器学习技术,实现更精准、智能的晶圆搬运和封装过程。
mm半导体工厂的AMHS系统精编
m m半导体工厂的A M H S系统精编Document number:WTT-LKK-GBB-08921-EIGG-22986300mm半导体工厂的AMHS系统在半导体制造技术高度发达的今天,300mm的半导体工厂已经成为全球半导体行业的主流。
由于300mm半导体生产线的巨额投入,人们不得不尽可能的挖掘300mm工厂的生产效率,以期得到更大的晶圆产出。
一个功能强大且性能稳定的AMHS系统在300mm工厂里扮演了一个非常重要的角色。
AMHS 系统不仅可以有效的利用宝贵的洁净室的生产空间,并且还可以提高生产设备的利用率,缩短在制品WIP的Cycle Time,所以在很多的300mm的半导体工厂里,AMHS都被视为可以快速提升产能,增加生产效率的尖兵利器。
AMHS系统在300mm半导体工厂的应用特点和200mm晶圆相比,更大的晶圆尺寸使得单批Lot的晶圆重量变得更大,仅凭在200mm工厂Intrabay内的人工搬运已经远远无法满足300mm工厂的生产要求。
因此,在300mm的半导体工厂里,生产方式的巨大变化也给AMHS系统提出了更高的要求。
搬送方式的巨大进化首先,是AMHS搬送方式从200mm工厂的SEMI Auto方式到300mm工厂Full Auto方式的转变。
如图1红色轨道所示:在200mm工厂所采用的Semi Auto生产方式中的Wafer搬送,只包括中央区域Interbay的AMHS搬送。
而Wafer到生产设备的部分需要人工搬送来完成。
而在300mm工厂里,由于wafer自身重量的增加,导致人工搬送异常困难,故由AMHS系统取而代之直接将wafer搬送到生产设备,如图1中的蓝色轨道,这即是Full Auto的作业方式。
这种方式极大减轻了生产一线操作人员的工作强度,同时又避免了因人为事故而造成的损失。
更为重要的是,在工厂产能迅速提升的过程中,可以满足大规模搬送量的AMHS系统的巨大优势可以完全呈现。
半导体自动化 200mm和300mm AMHS
通常,自动化是指集成在自动过程中用于降低人工操作程度的硬件和软件系统。
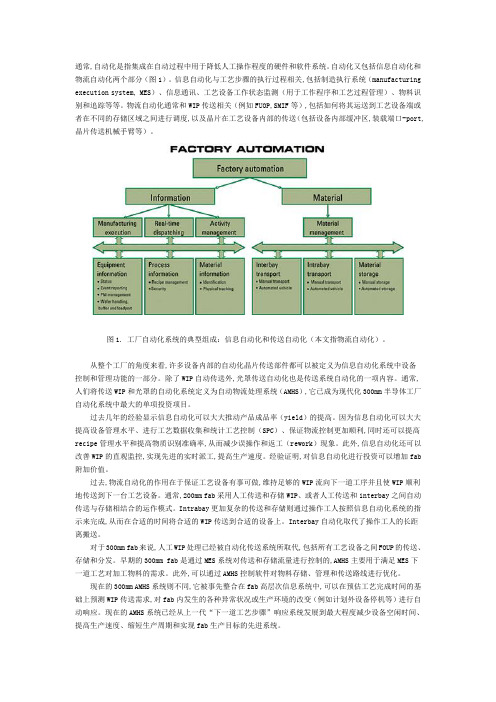
自动化又包括信息自动化和物流自动化两个部分(图1)。
信息自动化与工艺步骤的执行过程相关,包括制造执行系统(manufacturing execution system, MES)、信息通讯、工艺设备工作状态监测(用于工作程序和工艺过程管理)、物料识别和追踪等等。
物流自动化通常和WIP传送相关(例如FUOP,SMIF等),包括如何将其运送到工艺设备端或者在不同的存储区域之间进行调度,以及晶片在工艺设备内部的传送(包括设备内部缓冲区,装载端口-port,晶片传送机械手臂等)。
图1. 工厂自动化系统的典型组成:信息自动化和传送自动化(本文指物流自动化)。
从整个工厂的角度来看,许多设备内部的自动化晶片传送部件都可以被定义为信息自动化系统中设备控制和管理功能的一部分。
除了WIP自动传送外,光罩传送自动化也是传送系统自动化的一项内容。
通常,人们将传送WIP和光罩的自动化系统定义为自动物流处理系统(AMHS),它已成为现代化300mm半导体工厂自动化系统中最大的单项投资项目。
过去几年的经验显示信息自动化可以大大推动产品成品率(yield)的提高。
因为信息自动化可以大大提高设备管理水平、进行工艺数据收集和统计工艺控制(SPC)、保证物流控制更加顺利,同时还可以提高recipe管理水平和提高物质识别准确率,从而减少误操作和返工(rework)现象。
此外,信息自动化还可以改善WIP的直观监控,实现先进的实时派工,提高生产速度。
经验证明,对信息自动化进行投资可以增加fab 附加价值。
过去,物流自动化的作用在于保证工艺设备有事可做,维持足够的WIP流向下一道工序并且使WIP顺利地传送到下一台工艺设备。
通常,200mm fab采用人工传送和存储WIP、或者人工传送和interbay之间自动传送与存储相结合的运作模式。
Intrabay更加复杂的传送和存储则通过操作工人按照信息自动化系统的指示来完成,从而在合适的时间将合适的WIP传送到合适的设备上。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
简单介绍一下半导体工厂AMHS系统的搬运机器人
alexjornne 发表于: 2010-6-26 23:20 来源: 半导体技术天地
写得不好,请大家多多指教。
OHS(Over Head Shuttle )
可以在安装在天井下轨道上高速移动的自动搬运装置。
一般是用于成膜、洗浄等各个保管设备间FOUP搬运
OHT (Overhead Hoist Transfer )
是安装在天井下轨道下高速移动的自动搬运小车。
由升降装置马达驱动BELT,使GRIPPER自动抓取设置在port的foup。
这是300mm晶圆厂运用最广防的搬运工具。
GRIPPER有不同的类型可以搬运不同类型的foup。
从第一代10几年前只能低速走行单线轨道,移载设置于其正下方port的foup,
到第二代可以高速走行在分歧轨道,
第三代不仅可以走行在分歧轨道,还可以左右移载设置在STS,UTS上的FOUP 再到第四代450mm搬运小车,更新速度可谓非常之快。
中国国内半导体厂商使用第一代,第二代自动搬运小车,目前国内还没有使用第三代自动搬运小车的客户。
AGV (Automated Guided Vehicle)
车上安装了多关节手臂机器人,用于搬运保管设备和制造设备之间的foup。
本搬运小车由于安装了大容量的电池,可以自动走行在工厂的地板上,并按照程序设置,可以走行比较复杂的路径。
台湾,韩国有半导体厂商很多使用这种小车的案例。
RGV (Automated Guided Vehicle)
本小车走行在安装在地板上的轨道,可以高速搬运保管设备和制造设备之间的foup。
和AGV同样搭载了多关节手臂机器人,但是小车走行速度大大高于同类型的AGV。
韩国半导体厂商有使用这种小车的案例。
STOCKER
是fab里面的一时自动保管仓库。
可以把半成品的硅片暂时存放于此。
有好几种类型。
其中一种塔形仓库可以实现foup楼层之间的搬运。
以后有空再说说FPD工厂的搬运机器人。