同济大学刚体转动惯量实验
转动惯量实验报告-理论力学
理论力学转动惯量实验报告实验小组成员:1453352 郭佳林 1453422 贺春森 1453442 刘美岑 1450051 万丽娟 1453208 王玮实验时间:2015年5月24日13:30——15:30实验地点:同济大学四平路校区力学实验中心【实验概述】转动惯量是描述刚体转动中惯性大小的物理量,它与刚体的质量分布及转轴位置有关。
正确测定物体的转动惯量,对于了解物体转动规律,机械设计制造有着非常重要的意义。
然而在实际工作中,大多数物体的几何形状都是不规则的,难以直接用理论公式算出其转动惯量,只能借助于实验的方法来实现。
因此,在工程技术中,用实验的方法来测定物体的转动惯量就有着十分重要的意义。
IM-2 刚体转动惯量实验仪,应用霍尔开关传感器结合计数计时多功能毫秒仪自动记录刚体在一定转矩作用下,转过π角位移的时刻,测定刚体转动时的角加速度和刚体的转动惯量。
因此本实验提供了一种测量刚体转动惯量的新方法,实验思路新颖、科学,测量数据精确,仪器结构合理,维护简单方便,是开展研究型实验教学的新仪器。
【实验目的】1.了解多功能计数,计时毫秒仪实时测量(时间)的基本方法。
2.用刚体转动法测定物体的转动惯量。
3.验证转动的平行轴定理。
4.验证刚体定轴转动惯量与外力矩无关。
【实验原理】1.转动力矩、转动惯量和角加速度的关系系统在外力矩作用下的运动方程错误!未找到引用源。
(1)由牛顿第二定律,可知:砝码下落时的运动方程为:即绳子的张力砝码与系统脱离后的运动方程(2)由方程(1)和(2)可得:(3)2.角速度的测量错误!未找到引用源。
(4)若在t1、t2时刻测得角位移θ1、θ2,则(5)(6)所以,由方程(5)和(6),可得:3.转动惯量J的理论公式1)设圆形试件,质量均匀分布,总质量为M,其对中心轴的转动惯量为J,外径为D1,,内径为D2,则2)平行轴定理:设转动体系的转动惯量为J0,当有M1的部分质量原理转轴平行移动d的距离后,则体系的转动惯量为:【实验器材】1.实验仪器IM-2刚体转动惯量实验仪(含霍尔开关传感器、计数计时多功能毫秒仪、一根细绳、一个质量为100g的砝码等,塔轮直径从下至上分别为30mm、40mm、50mm、60mm,载物台上的孔中心与圆盘中心的距离分别为40mm、80mm、120mm)(如下图)2.实验样品1)一个钢质圆环(内径为175mm,外径为215mm,质量为933g)2)两个钢质圆柱(直径为38mm,质量为400g)【实验步骤】1.实验准备在桌面上放置IM-2转动惯量实验仪,并利用基座上的三颗调平螺钉,将仪器调平。
刚体转动惯量的测定_实验报告
实验三刚体转动惯量的测定转动惯量是刚体转动中惯性大小的量度。
它与刚体的质量、形状大小和转轴的位置有关。
形状简单的刚体,可以通过数学计算求得其绕定轴的转动惯量;而形状复杂的刚体的转动惯量,则大都采用实验方法测定。
下面介绍一种用刚体转动实验仪测定刚体的转动惯量的方法。
实验目的:1、理解并掌握根据转动定律测转动惯量的方法;2、熟悉电子毫秒计的使用。
实验仪器:刚体转动惯量实验仪、通用电脑式毫秒计。
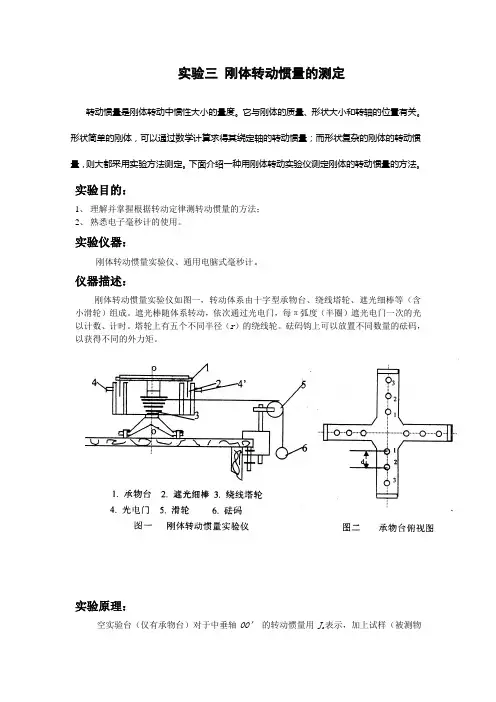
仪器描述:刚体转动惯量实验仪如图一,转动体系由十字型承物台、绕线塔轮、遮光细棒等(含小滑轮)组成。
遮光棒随体系转动,依次通过光电门,每π弧度(半圈)遮光电门一次的光以计数、计时。
塔轮上有五个不同半径(r)的绕线轮。
砝码钩上可以放置不同数量的砝码,以获得不同的外力矩。
实验原理:空实验台(仅有承物台)对于中垂轴OO’的转动惯量用J o表示,加上试样(被测物体)后的总转动惯量用J 表示,则试样的转动惯量J 1 :J 1 = J –J o (1) 由刚体的转动定律可知:T r – M r = J α (2) 其中M r 为摩擦力矩。
而 T = m(g -r α) (3) 其中 m —— 砝码质量 g —— 重力加速度 α —— 角加速度 T —— 张力1. 测量承物台的转动惯量J o未加试件,未加外力(m=0 , T=0)令其转动后,在M r 的作用下,体系将作匀减速转动,α=α1,有 -M r1 = J o α1 (4) 加外力后,令α =α2m(g –r α2)r –M r1 = J o α2 (5) (4)(5)式联立得J o =212212mr mgrααααα--- (6)测出α1 , α2,由(6)式即可得J o 。
2. 测量承物台放上试样后的总转动惯量J ,原理与1.相似。
加试样后,有 -M r2=J α3 (7) m(g –r α4)r –Mr 2= J α4 (8)∴ J =234434mr mgr ααααα--- (9)注意:α1 , α3值实为负,因此(6)、(9)式中的分母实为相加。
刚体转动惯量测定实验
刚体转动惯量测定实验
刚体转动惯量简介 实验装置 实验内容及操作步骤 数据处理
理论基础 实验原理 注意事项 思考与论
刚体转动惯量简介
转动惯量是刚体转动中惯性大小的量度。它取决于刚体的 总质量,质量分布、形状大小和转轴位置。对于形状简单,质 量均匀分布的刚体,可以通过数学方法计算出它绕特定转轴的 转动惯量,但对于形状比较复杂,或质量分布不均匀的刚体, 用数学方法计算其转动惯量是非常困难的,因而大多采用实验 方法来测定。
用粗实线画坐标轴, 用箭头标轴方向,标坐标 轴的名称或符号、单位, 再按顺序标出坐标轴整分 格上的量值。
I (mA)
20.00 18.00 16.00 14.00
3.标实验点:
12.00
实验点可用“ ”、 10.00
“ ”、“ ”等符号标 8.00
出(同一坐标系下不同曲
线用不同的符号)。
6.00
4.00
实验原理
1、空实验台的转动惯量
m gTm a 1 J1
T•rLJ02 ar2
2
3
J0m 2gr1221mr2
LJ01
4
2、加试样后实验台的转动惯量 J 2为:
J2
mR(gR4) 4 3
3 4 分别为加砝码前、后实验台的角加速度。
3. 试样的转动惯量J为: J J2 J0
4. 角加速度的测量表达式: 2(kntmkmtn)
400.0
500.0
600.0
玻璃材料色散曲线图
理论基础
刚体的转动定律是刚体转动的动力学规律,与牛顿第二
a 定律相对应,作用力F相应为作用力矩 M ,加速度 相应
为角加速度 ,而质量则相应为刚体的转动惯量。
刚体转动实验
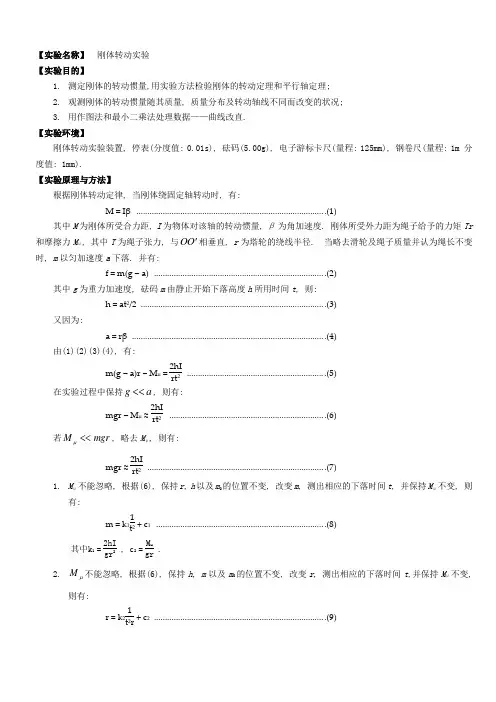
【实验名称】 刚体转动实验 【实验目的】1. 测定刚体的转动惯量,用实验方法检验刚体的转动定理和平行轴定理;2. 观测刚体的转动惯量随其质量, 质量分布及转动轴线不同而改变的状况;3. 用作图法和最小二乘法处理数据——曲线改直. 【实验环境】刚体转动实验装置, 停表(分度值: 0.01s), 砝码(5.00g), 电子游标卡尺(量程: 125mm), 钢卷尺(量程: 1m 分度值: 1mm).【实验原理与方法】根据刚体转动定律, 当刚体绕固定轴转动时, 有:M = I β ..................................................................................... .(1)其中M 为刚体所受合力距, I 为物体对该轴的转动惯量, β为角加速度. 刚体所受外力距为绳子给予的力矩Tr 和摩擦力M μ, 其中T 为绳子张力, 与O O '相垂直, r 为塔轮的绕线半径. 当略去滑轮及绳子质量并认为绳长不变时, m 以匀加速度a 下落. 并有:f = m(g − a) ............................................................................. .(2)其中g 为重力加速度, 砝码m 由静止开始下落高度h 所用时间t , 则:h = at 2/2 ................................................................................... .(3)又因为:a = r β ....................................................................................... .(4)由(1)(2)(3)(4), 有:m(g − a)r − M u = 2hIrt2 .............................................................. .(5)在实验过程中保持a g <<, 则有:mgr − M u ≈ 2hIrt2 ...................................................................... .(6)若mgr M <<μ, 略去M μ, 则有:mgr ≈ 2hI rt2 ................................................................................ .(7)1. M μ不能忽略, 根据(6), 保持r , h 以及m 0的位置不变, 改变m , 测出相应的下落时间t , 并保持M μ不变, 则有:m = k 11t2 + c 1 ............................................................................ .(8)其中k 1 = 2hI gr 2 , c 2 = M ugr .2.μM 不能忽略, 根据(6), 保持h , m 以及m 0的位置不变, 改变r , 测出相应的下落时间t ,并保持M μ不变,则有:r = k 21t 2r+ c 2 ............................................................................. .(9)其中k 2 = 2hI mg , c 2 = M umg.【实验步骤】1. 调节实验装置(略)2. 选r = 2.50cm , 将m 0放在位置)5,5(' , 将m 从一固定高度由静止开始下落,, 改变m , 每次增加5.00g 砝码,到m = 35.00g 为止. 用停表测t , 三次取平均.3. 将m 0放在位置)5,5(', 维持m = 20.00g , 改变r , 取r = 1.00, 1.50, 2.00, 2.50, 3.00cm , 用停表测t , 三次取平均.【实验数据处理和误差分析】1. 保持r , h 以及m 0的位置不变, 改变m , 考察m 和1t 2 的关系h = 75.63cm r = 2.50cm m/g t 1/s t 2/s t 3/s t ¯/s 1000×t ¯-2/s -2 5.00 21.17 21.20 21.69 21.35 2.193 10.00 11.90 11.91 11.65 11.82 7.158 15.00 9.09 9.05 8.93 9.02 12.282 20.00 7.57 7.67 7.49 7.58 17.420 25.00 6.71 6.63 6.69 6.68 22.433 30.00 6.19 6.27 6.19 6.22 25.875 35.00 5.535.685.495.5732.271结果作图:m和1/t 2的关系0.005.0010.0015.0020.0025.0030.0035.0040.000.0005.00010.00015.00020.00025.00030.00035.0001000×(1/t 2)/s-2m /g使用最小二乘法处理数据, 得到拟合直线的方程为:y = 1.0134x + 2.6807 R 2 = 0.9976由公式(8), 取g = 9.8m/s 2:I = 1000gr 2k 12h = 4.10×104g ∙cm 2M u = grc 1 = 185.3g ∙cm 2∙s -22. 保持h , m 以及m 0的位置不变, 改变r . 考察r 和1t 2r 的关系h = 75.63cm m = 20.00g r/cm t 1/s t 2/s t 3/s t ¯/s 1000×t ¯-2r -1/s -2cm -1 1.0 22.13 21.82 21.98 21.98 2.071 1.5 13.95 13.99 13.92 13.95 3.424 2.0 9.86 9.77 9.91 9.85 5.157 2.5 7.86 7.84 7.83 7.84 6.502 3.0 6.466.546.476.497.914结使用最小二乘法处理数据, 得到拟合直线的方程为:y = 2.953x − 0.8924 R 2 = 0.9983由公式(9), 取:I = mgk 22000h = 4.38×104g ∙cm 2 M u = mgc 2 = 5.978g ∙cm 2∙s -2【思考题】1. 总结本实验所要求满足的实验条件, 说明它们在实验中是如何实现的. (1) 公式中没有体现角度.方法是使OO ’竖直, 细线与转轴垂直. (2) g a <<.使用较小质量的砝码, 使a 足够小. (同时增大了下落时间, 方便观测.) (3) 略去滑轮和绳子的质量, 略去滑轮轴上的摩擦力, 认为绳子长度不变.绳子和滑轮质量尽量小, 滑轮尽量光滑, 绳子不要用弹性的. (4) 定轴+转动.塔轮的松紧应适宜. 太紧就不会动, 太松就不是定轴转动了. (5) M μ不变.线尽量密绕, 螺丝在实验过程中不再调整. (6) I 不变.注意调整两根细柱B 和B ', 它们在实验过程中有时会松开.。
同济大学理论力学10动量矩定理

p=0
vQ = 0
rQC × v Q = 0
3. 当Q点为固定点 :
LQ = LO − rQ × p
4. 当 rQC // v Q 时 :
′ LQ = LO − rQ × p
三、定轴转动刚体的动量矩
z
Lz = ∫ rdmv = ∫ r 2 dmω = J z ω
(v = rω)
LCz = J Cz ω
质点系对固定点O的动量矩与对质心C点动量矩的关系
ri = rQ + ri
'
'
' dri drQ dri = + dt dt dt
dmvi
z
dri vi = vQ + dt
Mi
考虑到质心公式
r
v v mv C = ∫ v dm 和
'
r′
rQ
Q
mrC = ∫ rdm
dr dr )dm + ∫ ( r ' × v Q )dm + ∫ ( r ' × )dm = ∫ rQ × (v Q + dt dt
∫
t2 e M Oi dt
LO2 LO1
dLO = ∫
t2
t1
∑
e M Oi dt
LO2 − LO1 = ∑ ∫
t1
动量矩定理的积分形式
质点系对固定点O的动量矩在一段时间内的增量,等于作 用于质点系的外力在同一时间段内对O点的冲量矩之和。
1.
e M Oi = 0 , ∑
L O = 常量;
质点系动量矩守恒
Jz = 1 mi R 2 2
z
mi
O
1 1 1 2 2 J z = ∑ mi R = (∑ mi ) R = mR 2 2 2 2
刚体转动惯量的测定实验原理
刚体转动惯量的测定实验原理转动惯量的小秘密。
你听说过“转动惯量”吗?这其实就是描述一个物体转得多快
或多慢的一个参数。
物体转得快,可能是因为它轻,也可能是因为
它形状特殊。
那我们要怎么测这个转动惯量呢?
其实方法很简单,就是让物体转起来,然后看看它转得怎么样。
就像你拿一个陀螺,轻轻一抽,它就能转很久。
这是因为陀螺的底
部是尖的,转动惯量小,所以转得快。
但咱们实验室里用的可不是陀螺,而是一些更复杂的物体。
我
们会用一个恒定的力矩去让物体转,然后看它是怎么转的。
力矩就
是力和力臂的乘积,你可以想象成是力和距离的“合作”。
当这个
力矩是恒定的,物体的角加速度也会是恒定的。
所以啊,通过测量物体的角速度、角加速度,我们就可以算出
它的转动惯量。
这就像我们测体重一样,虽然方法不同,但目的都
是想了解自己。
而对于物理学家来说,了解物体的转动惯量,就像
是了解自己一样重要!。
测量刚体的转动惯量实验报告及数据处理
欢迎阅读
欢迎阅读
实验讲义补充:
1. 刚体概念:刚体是指在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物体。
2. 转动惯量概念:转动惯量是刚体转动中惯性大小的量度。
它取决于刚体的总质量,质量分布、形状大小和转轴位置
3. 转动定律:合外力矩=转动惯量×角加速度
4. 转动惯量叠加:
空盘:(1)阻力矩(2)阻力矩+砝码外力→J1
空盘+被测物体:(1)阻力矩(2)阻力矩+砝码外力→J2
被测物体:J3=J2-J1
5.
6. 3组
7.
8.
9.
10. 11.
12. 1. 2. 3. 误差(1)(注意:直接测量的是直径),x1,x2,x3,x4,x5,x6,i=6,计算x 平均值,
取n=6时的1.05
,我们处理为0 C=1.05,仪器允差0.02mm,δB=0.01905mm
总误差:,ux=0.01905m m
欢迎阅读
欢迎阅读
,u rx=0.01905/11.99=0.1589%
R=11.99mm±0.01905mm
urx=0.1589%
计算转动惯量的结果表示:
,总误差:uJ=,相对不确定=uJ/J 圆环:,同上.
(2)
实验测量计算的误差:。
测量刚体的转动惯量实验报告及数据处理
测量刚体的转动惯量实验报告及数据处理实验讲义补充:1.刚体概念:刚体是指在运动中和受力作用后,形状和大小不变,而且内部各点的相对位置不变的物体。
2.转动惯量概念:转动惯量是刚体转动中惯性大小的量度。
它取决于刚体的总质量,质量分布、形状大小和转轴位置3.转动定律:合外力矩=转动惯量×角加速度4.转动惯量叠加:空盘:(1)阻力矩(2)阻力矩+砝码外力→J1空盘+被测物体:(1)阻力矩(2)阻力矩+砝码外力→J2被测物体:J3=J2-J15.转动惯量理论公式:圆盘&圆环6.转动惯量实验仪器:水准仪;线水平;线与孔不产生摩擦;塔轮选小的半径;至少3个塔轮半径,3组砝码质量7.计数器:遮光板半圈π;单电门,多脉冲;空盘15圈,20个值;加上被测物体,8个值;8.泡沫垫板9.重力加速度:9.794m/s^210.质量:1次读数,包括砝码,圆盘,圆环,以及两圆柱体;11.游标卡尺:6次读数,包括圆盘半径,圆环内外半径,塔轮半径,转盘上孔的内外半径(求平均值)12.实验目的:测量值与理论值对比实验计算补充说明:1.有效数字:质量16.6g,故有效数字为3位2.游标卡尺:0.02mm,读数最后一位肯定为偶数;3.误差&不确定度:(1)理论公式计算的误差:圆盘:(注意:直接测量的是直径)质量m=485.9g±0.1000g;(保留4位有效数字)um=0.1000/485.9*100%=0.02058%半径R=11.99mm±0.02000/1.05mm若测6次,x1,x2,x3,x4,x5,x6,i=6,计算x平均值,取n=6时的1.05,我们处理为0C=1.05,仪器允差0.02mm,δB=0.01905mm 总误差:,ux=0.01905m m,u rx=0.01905/11.99=0.1589%R=11.99mm±0.01905mmurx=0.1589%计算转动惯量的结果表示:,总误差:uJ=,相对不确定=uJ/J圆环:,同上.(2)实验测量计算的误差:根据,,对R(塔轮半径),m(砝码质量),β2和β1求导,()。
刚体转动惯量
中心轴的转动惯量。将(6-9)代入(6-7),得 用作图法,作出 ~ 图,如果是一直线,则证明转动定理及平行轴定理成立。 .
注意,在坐标纸上作曲线要求线细、光滑,实验点分布在线的两侧。 【实验仪器】 刚体转动惯量仪;电子秒表,砝码片(m = 5.00g)若干,卷尺。 【实验内容及数据处理】 1.取下塔轮,换上准直仪,调节底脚螺丝,使中心轴两触点连线与地面垂直,换上塔 轮,为减少摩擦并维持不变的摩擦力,调节塔轮的上触点螺丝,选择一个塔轮半径,绕上细 线。选定m0的位置,让m从标志点静止下落,用电子秒表记下下落h距离后的时间t,重复十 次,改变m,每次增加5.00g,直到35.00g为止。注意砝码托为5.00g . 在坐标纸上作出图m~ ,利用(6-8)求出转动惯量J和摩擦阻力矩 实验数据表 20.00
之和,其中T 是细绳上的张力,r是实验中所用的塔轮
(6-5) 由(6-3)、(6-4)、(6-5)解得 . (6-6) 当 时,(6-6)式可以近似得到
. (6-7)
图6-1 实验装置图 讨论: (1)选定一个塔轮半径,如r4 ,固定m0 的位置(如3,3),改变m测出在其下降一定 距离h时所用的时间t,满足
25.00
30.00
35.00
/s-2 在m~
图中斜率k1 = ,截距 b1 = =
转动惯量J = 阻力矩
2.另取一个塔轮半径,保持m=15.00g,对称地改变m0的位置,使m0到中心轴的距离分别 为(1, 1)、(2, 2)、(3, 3)、(4, 4)、(5, 5),记下m从标志点下落h的时间t , 重复三次。 参阅附录三,作出 ~ 图,是否成直线,检验平行轴定理是否成立。
, (6-8) 由于h、J、r都一定,因此作直线m~ ,利用其纵轴上的截矩就可以求出摩擦阻力矩 .
测量刚体的转动惯量——大物实验
实验五 测量刚体的转动惯量转动惯量是刚体转动中惯性大小的量度.它取决于刚体的总质量,质量分布、形状大小和转轴位臵.对于形状简单,质量均匀分布的刚体,可以通过数学方法计算出它绕特定转轴的转动惯量,但对于形状比较复杂,或质量分布不均匀的刚体,用数学方法计算其转动惯量是非常困难的,因而大多采用实验方法来测定.转动惯量的测定,在涉及刚体转动的机电制造、航空、航天、航海、军工等工程技术和科学研究中具有十分重要的意义.测定转动惯量常采用扭摆法或恒力矩转动法,本实验采用恒力矩转动法测定转动惯量.【实验目的】1.学习用恒力矩转动法测定刚体转动惯量的原理和方法.2.观测转动惯量随质量、质量分布及转动轴线的不同而改变的状况,验证平行轴定理.3.学会使用智能计时计数器测量时间.【实验原理】1.恒力矩转动法测定转动惯量的原理根据刚体的定轴转动定律βJ M =(1)只要测定刚体转动时所受的总合外力矩M 及该力矩作用下刚体转动的角加速度β,则可计算出该刚体的转动惯量J .设以某初始角速度转动的空实验台转动惯量为J 1,未加砝码时,在摩擦阻力矩M μ的作用下,实验台将以角加速度β1作匀减速运动,即:11βμJ M =- (2)将质量为m 的砝码用细线绕在半径为R 的实验台塔轮上,并让砝码下落,系统在恒外力作用下将作匀加速运动.若砝码的加速度为a ,则细线所受张力为T= m (g - a).若此时实验台的角加速度为β2,则有a= Rβ2.细线施加给实验台的力矩为T R= m (g - Rβ2) R ,此时有:212)(ββμJ M R R g m =-- (3)将(2)、(3)两式联立消去M μ后,可得:1221)(βββ--=R g mR J (4)同理,若在实验台上加上被测物体后系统的转动惯量为J 2,加砝码前后的角加速度分别为β3与β4,则有:3442)(βββ--=R g mR J (5)由转动惯量的迭加原理可知,被测试件的转动惯量J 3为:123J J J -= (6)测得R 、m 及β1、β2、β3、β4,由(4),(5),(6)式即可计算被测试件的转动惯量.2.β的测量实验中采用智能计时计数器记录遮挡次数和相应的时间.固定在载物台圆周边缘相差π角的两遮光细棒,每转动半圈遮挡一次固定在底座上的光电门,即产生一个计数光电脉冲,计数器记下遮档次数k 和相应的时间t .若从第一次挡光(k =0,t =0)开始计次,计时,且初始角速度为ω0,则对于匀变速运动中测量得到的任意两组数据(k m ,t m )、(k n ,t n ),相应的角位移θm 、θn 分别为:2021m m m m t t k βωπθ+== (7) 2021n n n n t t k βωπθ+== (8)从(7)、(8)两式中消去ω0,可得:nm m n n m m n t t t t t k t k 22)(2--=πβ (9)由(9)式即可计算角加速度β.3.平行轴定理理论分析表明,质量为m 的物体围绕通过质心O 的转轴转动时的转动惯量J 0最小.当转轴平行移动距离d 后,绕新转轴转动的转动惯量为:20d m J J += (10)4.转动惯量实验组合仪简介转动惯量实验仪如图1所示,绕线塔轮通过特制的轴承安装在主轴上,使转动时的摩擦力矩很小.塔轮半径为15,20,25,30,35mm 共5挡,可与大约5g 的砝码托及1个5g ,4个10g 的砝码组合,产生大小不同的力矩.载物台用螺钉与塔轮连接在一起,随塔轮转动.随仪器配的被测试样有1个圆盘,1个圆环,两个圆柱;试样上标有几何尺寸及质量,便于将转动惯量的测试值与理论计算值比较.圆柱试样可插入载物台上的不同孔,这些孔离中心的距离分别为45,60,75,90,105mm,便于验证平行轴定理.铝制小滑轮的转动惯量与实验台相比可忽略不记.一只光电门作测量,一只作备用,可通过智能计时计数器上的按钮方便的切换.图1 转动惯量实验组合仪智能计时计数器如图2所示:图2 智能计时计数器智能计时计数器可测量时间、速度、加速度等多种物理量.在本实验中利用单电门、多脉冲测量时间.上电开机后显示“智能计数计时器成都世纪中科”画面延时一段时间后,显示操作界面:上行为测试模式名称和序号,例:“1 计时”表示按模式选择/查询下翻按钮选择测试模式.下行为测试项目名称和序号,例:“1-1 单电门”表示项目选择/查询上翻按钮选择测试项目.选择好测试项目后,按确定键,LCD将显示“选A通道测量”,然后通过按模式选择/查询下翻按钮和项目选择/查询上翻按钮进A或B通道的选择,选择好后再次按下确认键即可开始测量.一般测量过程中将显示“测量中*****”,测量完成后自动显示测量值,若该项目有几组数据,可按查询下翻按钮或查询上翻按钮进行查询,再次按下确定键退回到项目选择界面.如未测量完成就按下确定键,则测量停止,将根据已测量到的内容进行显示,再次按下确定键将退回到测量项目选择界面.【实验内容】1.实验准备在桌面上放臵ZKY-ZS转动惯量试验仪,并利用基座上的三颗调平螺钉,利用水准仪,将仪器调平.将滑轮支架固定在实验台面边缘,调整滑轮高度及方位,使滑轮槽与选取的线绕塔轮槽等高,且其方位相互垂直,并且用数据线将智能计时计数器中A或B通道与转动惯量实验仪其中一个光电门相连.2.利用天平测量砝码和样品的质量,游标卡尺测量样品的尺寸.3.测量并计算实验台的转动惯量J1(1)测量β1上电开机后LCD显示“智能计数计时器成都世纪中科”欢迎界面延时一段时间后,显示操作界面:①选择“计时1—2 多脉冲”.②选择通道.③用手轻轻拨动载物台,使实验台有一初始转速并在摩擦阻力矩作用下作匀减速运动.④按确认键进行测量.⑤载物盘转动多圈后按确认键停止测量.⑥查阅数据,并将查阅到的数据记入表格中;采用逐差法处理数据,将第1和第5组,第2和第6组……,分别组成至少4组,用(9)式计算对应各组的β1值,然后求其平均值作为β1的测量值.⑦按确认键后返回“计时1—2 多脉冲”界面.(2)测量β2①选择塔轮半径R及砝码质量,将1端打结的细线沿塔轮上开的细缝塞入,并且不重叠的密绕于所选定半径的轮上,细线另1端通过滑轮后连接砝码托上的挂钩,用手将载物台稳住;②重复(1)中的2、3、4步③释放载物台,砝码重力产生的恒力矩使实验台产生匀加速转动;记录至少8组数据后停止测量.查阅、记录数据于表格中并计算β2的测量值.由(4)式即可算出J 1的值.4.测量并计算实验台放上试样后的转动惯量J 2 ,计算试样的转动惯量J 3 并与理论值比较.将待测试样放上载物台并使试样几何中心轴与转轴中心重合,按与测量J 1同样的方法可分别测量未加法码的角加速度β3与加砝码后的角加速度β4.由(5)式可计算J 2的值,已知J 1 、J 2 ,由(6)式可计算试样的转动惯量J 3 .已知圆盘、圆柱绕几何中心轴转动的转动惯量理论值为:221mR J = (11)圆环绕几何中心轴的转动惯量理论值为:()222内外R R m J += (12)计算试样的转动惯量理论值并与测量值J 3 比较,计算测量值的相对误差:%1003⨯-=J J J E (13)5.验证平行轴定理将两圆柱体对称插入载物台上与中心距离为d 的圆孔中,测量并计算两圆柱体在此位臵的转动惯量.将测量值与由(11)、(10)式所得的计算值比较,若基本一致即验证了平行轴定理.理论上,同一待测样品的转动惯量不随转动力矩的变化而变化.6.利用控制变量法,改变塔轮半径或砝码质量(五个塔轮,五个砝码),保持其它实验条件不变,进行测量并对数据进行分析,探索其规律,寻求发生误差的原因,探索测量的最佳实验条件.【实验仪器】ZKY —ZS 转动惯量实验仪.电子天平,游标卡尺.【思考题】1. 分析影响实验精度的各种因素,如何减少这些因素影响?2. 是否可以通过实验和作图,既求出转动惯量,又求出摩擦力矩?。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
12
7.589
8.256
11
7.163
7.822
10
6.739
7.389
9
6.303
6.945
8
5.844
6.475
7
5.359
5978
6
4.84
5.444
5
4.283
4.867
4
3.674
4.232
3
2.997
3.52
2
2.222
2.689
1
1.285
1.646
β2,t1
2.998 3.221
β2,t2
8.01 7.567 7.126
β2,t1 β2,t2 β1,t1 β1,t2 β2 β1 J 理论值 实际值 误差
9
6.687
6.541
7.039
6.523
6.672
8
6.209
6.066
6.555
6.048
6.193
7
5.702
5.564
6.042
5.545
5.687
6
5.161
5.027
5.493
17
11.75 11.794 11.846 11.842 11.823
16
11.23
11.27 11.324 11.317
11.3
15 10.712
10.75 10.804 10.796 10.781
14 10.196 10.231 10.286 10.276 10.262
13
9.683
9.714
9.771
4.797 4.728 4.948
4.72 4.801
1.349 1.341 1.362
1.34 1.346
3.176 3.156 3.207 3.154 3.168
0.75599 0.758553 0.757112 0.755431 0.753453
-0.06819 -0.06622 -0.0678 -0.06717 -0.06628
9.759
9.746
12
9.171
9.199
9.257
9.243
9.232
11
8.662
8.687
8.746
8.73
8.72
10
8.154
8.177
8.235
8.218
8.21
9
7.633
7.652
7.712
7.694
7.687
8
7.083
7.099
7.16
7.14
7.135
7
6.502
6.514
6.575
7 -0.0668
3 0.02223
2
2.
转动次数(π) 圆环 175,215,936,砝码 100 20 13.323 13.377 13.426
13.427
13.403
19 12.797 12.847 12.897 12.897 12.874
18 12.272 12.319
12.37 12.268 12.347
同济大学 刚体转动惯量实验报告
实验成员:*** 实验组别:第四组 实验时间:2013.10.28 实验地点:力学实验中心 105
一. 实验目的 1. 了解多功能计数计时毫秒仪实时测
量(时间)的基本方法 2. 用刚体转动法测定物体的转动惯量 3. 验证刚体转动的平行轴定理
4. 验证刚体的转动惯量与外力矩无关
6.554
6.552
6
5.98
5.89
5.95
5.927
5.927
5
5.211
5.217
5.276
5.252
5.255
4
4.479
4.482
4.538
4.512
4.519
3
3.664
3.661
3.715
3.691
3.698
2
2.726
2.719
2.766
2.749
2.753
1
1.586
1.58
1.61
6.004
5
5.311
5.386
5.308
4
4.552
4.624
4.549
3
3.709
3.718
3.707
2
2.744
2.808
2.743
1
1.58
1.632
1.58
β2,t1
3.731 3.754 3.728
β2,t2
5.677 5.707 5.678
β1,t1
1.611 1.616 1.616
β1,t2
8.761
9.294
8.316
8.843
7.873
8.392
7.432
7.944
6.992
7.497
11.452 10.996 10.541 10.089
9.638 9.19
8.742 8.298 7.854 7.413 6.974
11.624 11.166 10.709 10.255
9.802 9.352 8.902 8.456
14 10.419 10.591 10.507
13
9.965 10.055
9.971
12
9.431
9.52
9.437
11
8.901
8.988
8.905
10
8.372
8.458
8.375
9
7.83
7.913
7.831
8
7.257
7.339
7.258
7
6.652
6.731
6.651
6
6.006
6.083
θ=ω0t+0.5βt2 若在 t1、t2 时刻测得角位移θ1 和θ2, 则
θ1=ω0t1+0.5βt12 θ2=ω0t2+0.5βt22
所以,有以上两方程可得
β=2(θ2t1-θ1t2)/t1t2(t2-t1)
三. 实验步骤 1. 放置仪器,滑轮置于实验台外 3-4cm,
调节仪器水平,设置毫秒仪计数次数 2. 连接传感器与计数计时毫秒仪,调节
6.76 6.325 5.866
5.38 4.862 4.304 3.695 3.018
2.24 1.299 3.005 4.567 1.29 3.034 0.81061
1 -0.0662
4 0.02231
6
11.153 10.713 10.274
9.837 9.402 8.969 8.536 8.106 7.677 7.251 6.825 6.388 5.928 5.441
5.97 5.391 4.768 4.088 3.332 2.465 1.421 3.347
β2,t2 β1,t1 β1,t2 β2 β1 J 理论值 实际值 误差
5.145 1.453 3.419 0.641425 -0.0553 0.028095 0.027393 0.027792 1.40%
1.603
1.605
β2,t1
3.625 3.637 3.666 3.649
3.65
β2,t2
5.497 5.519
ห้องสมุดไป่ตู้
5.55 5.537
5.53
β1,t1
1.547 1.556 1.553 1.558 1.554
β1,t2
3.64 3.663 3.655 3.668 3.657
β2
0.570211 0.562391 0.567179 0.558919 0.567646
11
8.099
10
7.622
9
7.133
8
6.617
7
6.071
6
5.487
5
4.859
4
4.172
3
3.409
2
2.533
1
1.472
β2,t1
3.387
80mm 12.342
11.85 11.36 10.873 10.387 9.904 9.422 8.943 8.465 7.989 7.515 7.029 6.517 5.975 5.396 4.774 4.094 3.338 2.472 1.426 3.348
5.
转动次数(π) 验证平行轴
120mm
20 13.755 13.859
13.78
19 13.207 13.309 13.229
18 12.661 12.761 12.679
17 12.117 12.215 12.132
16 11.576 11.671 11.587
15 11.037 11.131 11.046
2 -0.0684
7 0.02222
1
11.113 10.674 10.236
9.8 9.366 8.934 8.503 8.074 7.646
7.22 6.795
6.36 5.9
5.414 4.895 4.336 3.725 3.045 2.264 1.316 3.02 4.584 1.292 3.039 0.81329
3.79 3.804 3.809
5.091 1.444 3.399 0.649374 -0.05825 0.027662
5.08 1.443 3.397 0.647577 -0.05901 0.027702
5.086 1.449 3.412 0.646145 -0.06018 0.027713