1四轮毂电机电动车的驱动电动车的控制器
四轮独立驱动电动车的ABS控制方法
关键 词 : 电动 车 ; 四轮独 立驱 动 ; B ; 制方 法 A S控 A n r l S r t g o Co to tae y f rABS S se o u — e lM o o i e EV y t m fFo rwh e t rDrv
Z o n i h n j inHab F n o g e h uYo g ,L e gi ,Ta io , a gZ n d & Z o x n S n h uQiu
[ b tat F r eligtea tlc rkn s m ( B )i a l tcvhce( V)w t i—h e m . A s c] o ain niokbaigs t r r z h — y e A S n nee r e il E ci i w el o hn
的增 大 , 于 汽 车 行 驶 安 全 性 能 的要 求 越 来 越 高 。 对
前 言
由于能 源危 机 与 环 境 污 染 等 问 题 , 电动 车 得 到 了越 来越 广泛 的研 究 与发 展 __j 目前 大 部分 电动 】 。 2 车是 后轮 或前 轮 驱 动 方 式 ; 于 能 量 传 递 效 率 和 车 基
c n r lsr t g o o to tae y f rABS i t did Boh smu ain a d ts n a p ooy e EV t o r7 W n— ssu e . t i lto n e to r t tp wi f u 00 i whe lmo o sa e h e tr r
汽 车制 动 防抱 系统 ( B ) A S 就是 在 这 种要 求 下 产生 和 发 展 的 J 目前 , B 。 A S系 统 已经 成 为 汽 车 向 电子 化 发展 的一个 重要 方 面 -1。现 有 的 电动 车 A S系 1 ] B 统往 往 沿用 了传 统 汽车 A S系统 的设 计 , B 这样 既 增加 了液压 、 动等机 械 结构 , 降低 了 电动 车特 有 传 又 的操 控性 能 。为 了提 高 电动车 的操 作 安全 性 和 控 制
轮毂电机分布式驱动控制 系统关键技术
各车企推出的分布式驱动概念车
丰田 ME.WE 及 FCV Plus ( 2013年,四轮毂电机)
奔驰SLS AMG电动版 ( 2013年,四轮边电机)
保时捷 Mission E ( 2015年,前后轴两电机)
蔚来 EP9 ( 2016年,四轮边电机)
2018日内瓦车展的分布式驱动电动车
捷豹I-PACE(量产)
前轮驱动力矩 后轮驱动力矩
四轮驱动力矩
1、两侧车轮能实现力矩分配; 2、力矩分配根据车辆的转向特性进行; 3、前轮由于存在转向角,因此力矩分配
和后轮不同,但总体趋势相同; 4、力矩分配以整车的总驱动力矩为基础,
对整车动力性影响较小。
快速控制原型试验平台
1.前期各程序编写 2.试验时实现监控
功能
试验时运行 试验时与外部 控制程序 进行数据交换
通讯架构搭建
CAN通讯网络
方向盘转角传感器
分布式驱动控制器
横摆角速度传感器
软件编写
数据接收程序
CAN报文解析程序
驱动力控制程序
数据记录程序
数据可视化监控界面1
数据发送程序
数据可视化监控界面2
试验分析
方向盘转角
总驱动力
横摆角速 度
各轮驱动力矩
质心侧偏角
车速
车辆过度转向,期望横摆力矩方向与横摆角速度方向相反,以抑 制 过度转向趋势,各轮驱动力输出符合实际
成功参展“2017年北京国际道路运输、 城市公交车辆及零部件展览会”
应用海格G-ECO智慧节能系统,采用E-Traction双轮毂 电机及浙大设计的分布式驱动控制及驱动防滑策略, 研发出能耗小、效率高、动力足的电动城市客车。
分布式驱动控制技术应用实例
轮毂电机驱动系统在电动汽车上的应用
轮毂电机驱动系统在电动汽车上的应用作者:吕金山秦滔文学肖建军来源:《今日自动化》2021年第11期[摘要]輪毂电机驱动系统被应用于电动汽车之上,有着较为优良的表现。
轮毂电机驱动系统在应用在呈现部分问题,例如电动汽车生命周期管理、汽车运行可靠性等,针对此类问题对轮毂电机驱动系统实际应用中进行改进优化,加装冷却风扇、使用电子差速控制系统、控制零部件质量等。
通过这些技术优化和改进,进一步提升了轮毂电机驱动系统在电动汽车上的应用广度和深度,为电动汽车发展添砖加瓦。
[关键词]轮毂电机;电差速;电动汽车;应用分析[中图分类号]U469.72 [文献标志码]A [文章编号]2095–6487(2021)11–00–02Application of Hub Motor Drive System in Electric VehicleLV Jin-shan, Qin Tao, Wen Xue, Xiao Jian-jun[Abstract]Hub motor drive system is applied to electric vehicle, which has a better performance. The application of hub motor drive system presents some problems, such as electric vehicle life cycle management, vehicle operation reliability, etc. in view of these problems, the practical application of hub motor drive system is improved and optimized, such as adding cooling fan,using electronic differential control system, controlling the quality of parts, etc. Through the optimization and improvement of these technologies, the application breadth and depth of hub motor drive system in electric vehicles are further improved, which contributes to the development of electric vehicles.[Keywords]hub motor; electric differential; electric vehicle; application analysis轮毂电机技术在实际应用的过程中表现出了非常明显的优势,即占用资源较少、整车结构简洁、可利用空间较大、应对故障能力较强、车辆操控性能好等,并且通过对此技术的应用,还有效的实现了电子差速的有效控制。
电动车电机控制器原理

电动车电机控制器原理
电动车电机控制器是控制电动车的核心部件,主要负责通过控制电流和电压来驱动电机转动。
其工作原理如下:
1. 车辆加速:当骑车者踩下油门,控制器会检测到这个信号,并控制电流的输出。
控制器将电流传送到电机,从而使电机转动起来。
电流的大小可以通过控制器内部的电流传感器进行调节。
2. 制动系统:当骑车者松开油门或踩下刹车,控制器会检测到这个信号,并降低电流的输出。
通过减小电流,电机的转速会减慢,最终停止。
控制器还会将制动能量转化为电能并回馈给电池进行充电,实现能量的回收利用。
3. 速度控制:控制器还可以根据车速信号来控制电机的转速。
当车速达到设定值时,控制器会减少电流输出,从而限制电机的转速,使车速保持在一个合适的范围内。
4. 温度保护:控制器通常还会监测电机的温度,并在温度过高时采取保护措施。
当电机温度超过设定阈值时,控制器会减小电流输出,以降低电机的负荷和温度,保护电机不受损坏。
5. 故障诊断:控制器还配备有故障诊断功能,可以监测电动车各个部件是否正常工作。
当发现故障时,控制器会发出警报信号,并记录相关故障代码,以便后续的维修和排除故障。
综上所述,电动车电机控制器通过控制电流和电压来驱动电机,
实现车辆的加速、制动和速度控制等功能,同时具备温度保护和故障诊断等安全保障机制。
四轮毂电机电动车的电子差速控制方法

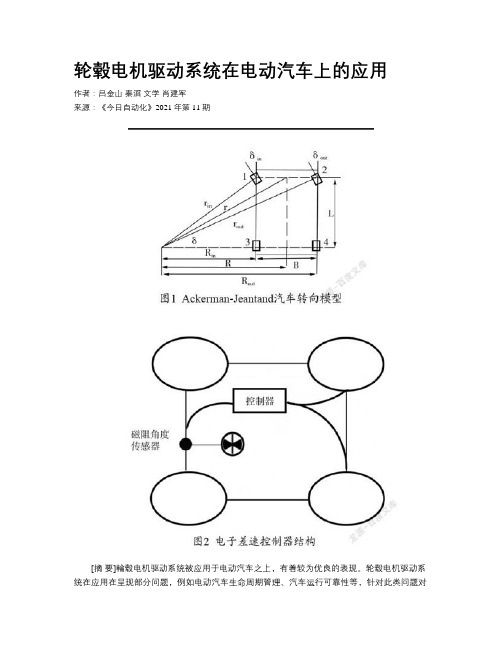
四轮毂电机电动车的电子差速控制方法作者:杨濛李睿智金家林来源:《科技风》2017年第21期摘要:通常四轮独立驱动的电动汽车电子差速系统都是基于转矩分配进行的,本文提出了一种通过对各轮速进行转速分配的电子差速系统,利用Ackermann-Jeantand转向模型,实时计算电子差速过程中随着转角角度以及车辆速度变化的各个车轮的所需转速,并分析了转向时转向轮之间的转矩分配问题。
在carsim联合matlab仿真中通过多种车辆工况仿真实验验证了所提出的算法的实用性以及可行性,仿真结果表明,整车系统动态性能良好,电子差速控制策略可以满足四轮独立驱动电动汽车的行驶要求。
关键词:电动车;轮毂电机;电子差速;控制方法随着能源短缺的危机和环境污染的日益严重,燃油车正逐渐被新能源汽车替代,电动汽车的出现可以解决上述问题,并且已经得到了广泛的关注,在电动汽车中,对于电机驱动控制系统,大部分电动车采用驱动电机与差速器相连再带动车轮的方式,通过电机驱动机械差速器来使得内外车轮的速度差实现差速。
而独立轮驱动的电动汽车会根据不同的方向转角来分配给内外侧车轮不同的驱动力矩来实现车辆的差速算法,但这种算法并不能减小车辆的转角半径而且车辆的滑移率也不能得到很好的控制。
本文提出了一种电子差速算法。
电子差速即通过车辆在不同转角以及车速的情况下,计算所需要的各轮轮速,然后经过对电机的转速控制,从而实现车辆的差速算法。
1 电子差速方法电子差速的方法是通过驾驶者输入的转角信号和油门信号传入控制器,再由控制器根据当前整车状态值计算出各轮所需转速,然后通过通信等方式分配给各轮控制器,再由各轮控制器根据所给定的轮速对电机做出调速,从而实现车辆的顺利转弯。
1.1 转向原理四輪电子差速需要对4个轮毂电机同时进行速度控制和差速计算,是一个复杂的控制系统。
其中包括方向盘转角传感器、霍尔传感器、电机控制器、4个轮毂电机。
电子差速转向系统根据当前状态实时调整电机转速。
四轮毂电机电动车的电子差速控制方法

越
员 泽蕴 垣
砸
渊员缘冤
郧泽赃责皂泽皂 渊 泽冤
越
棕皂渊 泽冤 运贼 蚤责 渊泽冤
越
棕 皂 渊 泽冤 栽藻 渊 泽冤
越
员 泽允 垣
月
渊员远冤
转整体的仿真框图如图所示袁仿真工况既可以通过 悦粤砸鄄
关键词院电动车曰轮毂电机曰电子差速曰控制方法
摇 摇 随着能源短缺的危机和环境污染的日益严重袁燃油车正逐 渐被新能源汽车替 代袁 电 动 汽 车 的 出 现 可 以 解 决 上 述 问 题袁 并 且已经得到了广泛 的 关 注袁在 电 动 汽 车 中袁 对 于 电 机 驱 动 控 制 系统袁大部分电动车采用驱动电机与差速器相连再带动车轮的 方式袁通过电机驱动机械差速器来使得内外车轮的速度差实现 差速遥 而独立轮驱动的电动汽车会根据不同的方向转角来分 配给内外侧车轮不同的驱动力矩来实现车辆的差速算法袁但这 种算法并不能减小车 辆 的 转 角 半 径 而 且 车 辆 的 滑 移 率 也 不 能 得到很好的控制遥 本文提出了一种电子差速算法遥
电子差速即通过车辆在不同转角以及车速的情况下袁计算 所需要的各轮轮速袁 然 后 经 过 对 电 机 的 转 速 控 制袁 从 而 实 现 车 辆的差速算法遥
员 电子差速方法 电子差速的方法是通过驾驶者输入的转角信号和油门信 号传入控制器袁再由控制器根据当前整车状态值计算出各轮所 需转速袁然后通过通 信 等 方 式 分 配 给 各 轮 控 制 器袁 再 由 各 轮 控 制器根据所给定的轮速对电机做出调速袁从而实现车辆的顺利 转弯遥 员援 员 转向原理 四轮电子差速需要对 源 个轮毂电机同时进行速度控制和 差速计算袁是一个复杂的控制系统遥 其中包括方向盘转角传感 器尧霍尔传感器尧电机控制器尧源 个轮毂电机遥 电子差速转向系统根据当前状态实时调整电机转速遥 改 变各轮转速实现差速遥 当电动车需要向右转向时袁则需右侧轮
《电动车控制器》课件
景区观光车
景区观光车是旅游业的重要组成部分,电动车控制器能够满 足景区观光车的特殊需求。
电动车控制器具备低噪音、低能耗、环保等特点,能够提供 更加舒适、安全的观光车服务,提升游客的旅游体验。
PART 02
电动车控制器的工作原理
电机控制原理
电机控制策略
了解电机的控制策略,如 矢量控制、直接转矩控制 等,以及它们在电动车控 制器中的作用。
电机驱动方式
了解电机的驱动方式,如 永磁同步电机、感应电机 等,以及它们在电动车中 的应用和优缺点。
电机保护功能
了解电机保护功能,如过 载保护、短路保护等,以 及它们在电动车控制器中 的实现方式。
PART 05
电动车控制器的市场前景
政策环境分析
政策支持
随着环保意识的提高和能源结构的调整,政府对电动车产业的支持力度不断加 大,为电动车控制器的发展提供了良好的政策环境。
法规限制
政府对机动车排放标准和能耗要求的不断提高,将进一步推动电动车控制器市 场的需求增长。
技术发展趋势
高效能
电动车控制器的技术发展趋势是 提高能效,降低能耗,延长续航 里程,以满足市场需求。
分为一体式控制器和分体 式控制器。
按控制方式分类
分为模拟控制器和数字控 制器。
电动车控制器路为 主,功能较为简单,性能不稳定
。
发展阶段
随着微处理器技术的普及,数字控 制器逐渐取代模拟控制器,功能更 加丰富,性能更加稳定。
智能化阶段
现代电动车控制器集成了多种传感 器和执行器,实现了对电动车的全 面智能化控制,提高了电动车的安 全性、舒适性和节能性。
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究
基于CarSim和Matlab四轮独立驱动轮毂电机电动汽车驱动控制系统的研究作者:梅鸣来源:《山东工业技术》2016年第21期摘要:针对四轮独立驱动轮毂电机电动汽车驱动控制系统进行了建模与仿真,在传统PID 的基础上引入SOA智能优化算法,最后验证了所建立的CarSim和Matlab车辆模型的合理性。
关键词:电动汽车;驱动控制系统;车辆模型;SOA智能优化算法DOI:10.16640/ki.37-1222/t.2016.21.1630 引言近年来,绿色环保与可持续发展成为日益重要的发展理念。
本文研究的轮毂电机驱动电动汽车在现有商用化电动汽车的基础上省略了减速器、差速器和传动轴等机械零部件部件,直接由整车控制器发出控制信号直接控制车轮,这样节省车内空间,更容易实现电动车的微型化、轻量化[1-2]。
本文将CarSim中的内燃机模型和传动系统模型,修改为毂电机模型,在Matlab/Simulink中搭建电机模型和控制系统模块,在联合CarSim进行联合仿真。
1 四轮轮毂电机电动汽车建模在Matlab/Simulink中搭建轮毂电机模型,去掉CarSim中的传统内燃机汽车模型,通过Matlab/Simulink和CarSim联合仿真,搭建出四轮独立驱动轮毂电机电动汽车整车模型。
1.1 轮毂电机建模轮毂电机无刷直流电机,其主要由电机本体、霍尔位置传感器和电子逆变器构成。
无刷直流电机数学模型形式可表示为:其中ea,eb,ec分别表示定子a,b,c三相生成的梯形反电动势。
电磁转矩方程为:式中:Te为电磁转矩;w为电机角速度;Tl为负载转矩;J为转动惯量;B为黏滞摩擦系数;ua,ub,uc为绕组电压,ia, ib,ic为相电流;ea,eb,ec为相反电势;L为相绕组自感系数;M为相绕组互感系数。
式(1)、式(2)和式(3)共同构成了无刷直流电机的微分方程数学模型。
采用基于SOA的PID控制算法来控制轮毂电机,1.2 整车模型搭建打开CarSim 8.02 软件,选择B-Class, Hatchback选项作为基准车辆,将CarSim中原有的内燃机模型改为 4-wheel drive(四轮驱动),其内容定义为选择No dataset select方式,同时将四轮驱动转矩设置为车辆模型的输入量变量。
轮毂电机驱动特种车辆的电子差速控制研究
轮毂电机驱动特种车辆的电子差速控制研究
刘桓
【期刊名称】《微特电机》
【年(卷),期】2024(52)2
【摘要】轮毂电机驱动电动车辆在整车布置、车辆动力学控制以及能量效率控制等方面具有巨大潜力。
综合考虑轮式车辆特点和特种车辆转向需求,着重考虑了基于轨迹转向和速差转向的转向方案。
仿真和实验结果表明各驱动轮可根据驾驶员意图实现转速分配,满足车辆直线行驶、转向行驶(包括零半径转向)要求。
【总页数】4页(P70-73)
【作者】刘桓
【作者单位】兰州文理学院电子与通信工程学院
【正文语种】中文
【中图分类】TM359.9
【相关文献】
1.后轮轮毂电机驱动电动汽车电子差速控制器研究
2.轮毂电机驱动汽车电子差速系统P-模糊PID控制研究
3.多轴轮毂电机驱动电动车电子差速控制研究
4.双轮毂电机驱动电动汽车电子差速控制研究
5.四轮毂电机独立驱动车辆转向电子差速控制
因版权原因,仅展示原文概要,查看原文内容请购买。
轮毂电机知识点总结
轮毂电机知识点总结一、轮毂电机的概念及作用轮毂电机是一种与汽车车轮相连的电机,其主要作用是为了驱动汽车行驶。
传统的汽车发动机通过传统的机械传动装置(如离合器、变速箱等)将动力传输到车轮上,而轮毂电机则直接将动力传递给车轮,从而实现了汽车的行驶功能。
二、轮毂电机的组成结构1. 电机本体:轮毂电机的核心部件,主要负责将电能转化为机械能,从而驱动车轮转动。
2. 传感器:用于探测车轮转速、车速等状态信息,以便控制电机的转速和输出力。
3. 控制器:负责监控电机的工作状态,根据传感器反馈的信息调整电机的工作参数,以实现对车轮的精确控制。
4. 冷却系统:因电机工作会产生大量热能,需要通过冷却系统进行散热,以确保电机的正常工作。
三、轮毂电机的工作原理1. 电机本体通过电能转换为机械能,使车轮转动,从而推动汽车前进。
2. 控制器监控传感器反馈的车轮状态信息,根据实时情况调整电机的转速和输出力,以确保车轮稳定、高效地转动。
3. 冷却系统持续散热,确保电机在高速运转时能够维持正常温度,避免因过热而影响电机的工作性能。
四、轮毂电机的优点1. 节能环保:相比传统的内燃机驱动方式,轮毂电机无需燃料燃烧,降低了车辆尾气排放,减少了对环境的污染。
2. 空间利用率高:轮毂电机直接安装在车轮上,无需传统的传动装置,节省了车辆空间,车身结构更加灵活。
3. 精准控制:轮毂电机可以根据实时反馈的车轮状态信息调整电机的工作参数,实现对车轮的精确控制,提高了行驶的平稳性和安全性。
4. 高效性能:轮毂电机不需要传统的传动装置,避免了传动过程中的能量损耗,提高了动力传输的效率。
五、轮毂电机的发展趋势1. 功率密度的提高:随着电机技术的不断进步,轮毂电机的功率密度将逐渐增加,能够提供更加强大的动力输出,满足不同车辆的需求。
2. 体积与重量的减小:轮毂电机的体积和重量将会不断减小,使其更加适合安装在不同类型的车辆上。
3. 高效节能:未来的轮毂电机将更加注重能源利用效率和环保性能,减少能量损耗,提高整车的能效。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
1 2 2 2 2
( 1. School of Aeronautics, Northwestern Polytechnical University, Xi’ an 710072, China; 2. School of M echatronics, Northwestern Polytechnical University, Xi’ an 710072, China)
第 11 卷 第 5期
2007 年 9 月
电 机 与 控 制 学 报 EL EC TR IC MA CH IN E S AND CON TROL
Vol111 No15 Sep. 2007
四轮毂电机电动车的电子差速控制方法
周勇 , 李声晋制和差速计算 , 是一个复杂的控制系统 。硬件 结构包括方向盘 、 位移传感器 、 控制器 、 4 个轮毂电 机、 每个电机的转子位置传感器 。图 2 为电子差速 转向总体控制框图 。
2 电子差速方法分析
电子差速的方法是通过驾驶者输入信号 , 控制 器改变车轮速度实现转向 , 如图 1 所示 。方向盘的 转动轴底部直接连接一个误差为 015%的位移传感 器 ,该传感器的位移范围是 ( 0 ~200 ) mm , 模拟电压 输出范围为 ( 0 ~5 ) V , 作为电子差速转向系统的指 令输入 。 211 转向原理 四轮电子差速需要对 4 个轮毂电机同时进行速
收稿日期 : 2007 - 05 - 15 基金项目 : 西北工业大学研究生创业种子基金 ( Z200724) 作者简介 : 周 勇 ( 1978 - ) ,男 ,讲师 ,博士研究生 ,主要研究方向为电力传动 、 车辆工程 ; 李声晋 ( 1964 - ) ,男 ,教授 ,博导 ,主要研究方向为电机电器 、 电力电子与电力传动 ; 田海波 ( 1974 - ) ,男 ,博士研究生 ,主要研究方向为智能机械 、 车辆结构及动力学 ; 方宗德 ( 1948 - ) ,男 ,教授 ,博导 ,主要研究方向为车辆工程 、 机械电子工程 ; 周奇勋 ( 1979 - ) ,男 ,博士研究生 ,主要研究方向为机械电子 、 电力传动 。
ΔT
=
πR +πW 2 ΔT
πR πW 2 + = v + K。 ( 8 ) ΔT ΔT
中图分类号 : TP27 文献标识码 : A 文章编号 : 1007- 449X (2007) 05- 0467- 05
Con trol m ethod of electron ic d ifferen tia l of EV w ith four in 2wheel m otors
ZHOU Yong , L I Sheng2jin , TI AN Hai2bo , FAN G Zong2de , ZHOU Q i2xun
Abstract: In order to realize the electronic differential system ( EDS) in an electric vehicle ( EV ) with four2 wheel drive, the p roject that based on four in2 wheel brushless DC motors is p roposed. According to the motor control theory and the traditional EDS, the whole design of the controller is given. U sing the Acker mann2 Jean2 tand turning model and the four wheels steering system, the speed of four wheels is calculated independently during the turning with the EDS, the p rincip le of torque distributing for four motors is discussed later . The control strategy for the consistency of the four wheels is designed. The different work conditions, including the condition of the vehicle with the unifor m speed, accelerating and decelerating, are researched, and the control strategy of the EDS for the vehicle with four in2 wheel motors is designed. By using four 700W 8 poles motors as examp le, the si m ulation and the no2load experi m ent are done. Si m ulation and experi m ent results validate the rationality of the controller, and show that the system has more favorable dynam ic perfor mance. The con2 trol strategy of the EDS fulfilled the request of the EV with four in2 wheel motors . Key words: electric vehicle; in 2 wheel motor; electrical differential system; control strategy
© 1994-2010 China Academic Journal Electronic Publishing House. All rights reserved.
第 5期
四轮毂电机电动车的电子差速控制方法
vout = Cout
469 =
个位移传感器将角度变化输入到控制器 , 因此输入 量为方向盘的角度和位移传感器的模拟输出 。首先 需要计算的方程就是输入角度 δ 与位移传感器模拟 量 x 之间的关系 : δ= f ( x ) 。 ( 1) 在计算此方程时 , 先对方向盘的模拟输入量进行定 标 , 随着方向盘的转动 , 确定位移传感器模拟量输出 的可取范围 ; 然后 , 测量方向盘的转角范围 , 显然 , δ 和 x 成线性关系 。本文的电子差速方案的目的是研 究汽车转向时的车速 、 转向角 、 每一个车轮的速度关 系 , 忽略了地面因素 、 轮胎差异因素 、 假设电动车在 普通公路地面上运行来计算各个参数 。在计算电动 车转向时的各个车轮速度时 , 为了研究转向方向盘 的输入角度与车轮速度变化的关系 , 必须建立速度 计算方程 。 假设某时刻汽车的运动模型如图 3 所示 。根据 [ 10 ] Acker mann 2 Jeantand 模型 ,涉及到的车体参数有 : δ in为前内轮转向角 ; δ out为前外轮转向角 , 单位为角 度 ; L 为车身长度 ; W 为车身宽度 ; R 为转向半径 ; R in为内轮转向半径 ; Rout为外轮转向半径 ; C in为内 轮一圈转过的距离 ; Cout为外轮一圈转过的距离 。