第6章材料的塑性变形
(整理)第6章金属及合金的塑性变形
第6章 金属及合金的塑性变形6-1 金属的变形特性金属在外力作用下的变形行为可用拉伸曲线来描述。
设拉力为P ,试样伸长量为dl ,则应力σ和应变ε分别为:A P σ=; ldl ε= 式中,A 为试样的截面积。
在拉伸过程中,A 和l 是变化的,在工程上,为了简化问题,A 常用A 0来代替,ε也用平均值表示ε=(l -l 0)/l 0,这样测得的σ-ε曲线称工程σ-ε曲线。
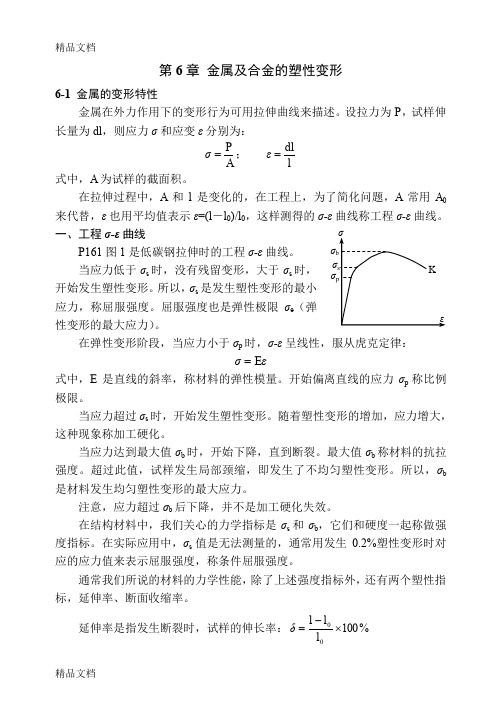
一、工程σ-ε曲线P161图1是低碳钢拉伸时的工程σ-ε曲线。
当应力低于σs 时,没有残留变形,大于σs 时,开始发生塑性变形。
所以,σs 是发生塑性变形的最小应力,称屈服强度。
屈服强度也是弹性极限σe (弹性变形的最大应力)。
在弹性变形阶段,当应力小于σp 时,σ-ε呈线性,服从虎克定律: εE σ=式中,E 是直线的斜率,称材料的弹性模量。
开始偏离直线的应力σp 称比例极限。
当应力超过σs 时,开始发生塑性变形。
随着塑性变形的增加,应力增大,这种现象称加工硬化。
当应力达到最大值σb 时,开始下降,直到断裂。
最大值σb 称材料的抗拉强度。
超过此值,试样发生局部颈缩,即发生了不均匀塑性变形。
所以,σb 是材料发生均匀塑性变形的最大应力。
注意,应力超过σb 后下降,并不是加工硬化失效。
在结构材料中,我们关心的力学指标是σs 和σb ,它们和硬度一起称做强度指标。
在实际应用中,σs 值是无法测量的,通常用发生0.2%塑性变形时对应的应力值来表示屈服强度,称条件屈服强度。
通常我们所说的材料的力学性能,除了上述强度指标外,还有两个塑性指标,延伸率、断面收缩率。
延伸率是指发生断裂时,试样的伸长率:%10000⨯-=l l l δσσ断面收缩率是指发生断裂时,试样截面积的变化率:%10000⨯-=A A A ψ 二、真应力-真应变曲线(T T εσ-曲线) 工程应力与真实应力之间的不同是容易发现的。
下面看看工程应变与真实应变的不同。
拉伸一个试样,使其伸长一倍,则工程应变1/)2(000=-=l l l ε;若是压缩,要获得同样数值的负应变,理应压缩到原长度的一半。
6 金属塑性变形与流动问题
附加应力定律:任何塑性变形物体内部,在变形过程中均
有自相平衡的附加应力。
6. 2. 2 变形条件对金属塑性的影响
一、变形温度
碳钢的塑性随温度变化图
就大部分金属来言,其总的趋势是:随着温 度的升高,塑性增加,但是这种增加并非简单的 线性上升。
2.变形速度
塑 性
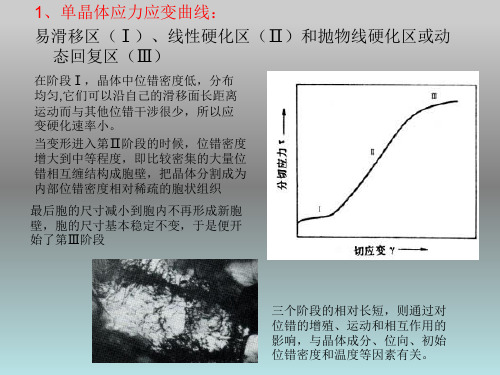
Ⅰ Ⅱ
变形速度,1/秒 图5-18 变形速度对塑性的影响
3.变形程度
冷变形时,变形程度越大,塑性越低;热变 形时,变形程度越大,塑性越高。
变形过程中,物体各质点将 向着阻力最小的方向移动。即 做最少的功,走最短的路。
图3-1 开式模锻的金属流动
图3-2 最小周边法则
拔长效率较低,主 要用于修正尺寸
拔长效率较高
6. 2 影响金属塑性、塑性变形和流动的 因素
6. 6. 6. 6. 6. 6. 6. 6. 2. 2. 2. 2. 2. 2. 2. 2. 1 2 3 4 5 6 7 8 塑性、塑性指标和塑性图 变形条件对金属塑性的影响 其他因素对塑性的影响 提高金属塑性的途径 摩擦对金属塑性变形和流动的影响 工具形状对金属塑性变形和流动的影响 金属各部分之间关系对塑性变形和流动的影响 金属本身性质不均匀对塑性变形和流动的影响
三、残余应力
定义:引起应力的外因去除后在物体内仍残存的应力。 特点:残余应力是弹性应力,它不超过材料的屈服极限。 分类: (1)第一类残余应力:存在于变形体各大区之间; (2)第二类残余应力:存在于各晶粒之间; (3)第三类残余应力:存在于晶粒内部。 残余应力产生的原因: (1)塑性变形不均匀。残余应力的符号与引起该残余应力 的塑性应变符号相反。 (2)温度不均匀(加热/冷却不均匀)引起的热应力。 (3)相变过程引起的组织应力。
石德珂《材料科学基础》考点精讲6

八、包申格效应
材料经预先加载产生少量塑性变形(小于 4%),而后同向加载则 σe升高,反向加载则 σe下降,此 现象称为包申格效应。
考点二:滑移和孪生(重要等级 ★★★★★)
[复习思路]掌握
金属发生塑性变形的主要方式 滑移和孪生的概念 滑移和孪生的异同点
滑移
{ 金属塑性变形的主要方式 孪生 晶界滑动(高温下) 滑移带—把试样抛光,适量的塑性变形后,在宏观或光学显微镜下看到的试样表面上平行或交叉 的细线。 滑移线—在电子显微镜下,可以看到滑移带是由更多的一组平行线组成,称为滑移线。
各向同性。
对于 α Fe多晶体其 E为 211400MN/m2
七、弹性模量在工程上的应用
对零(构)件进行刚度设计
σ
=
F A
=Eε→
F ε
=EA
EA(GA),代表零件的刚度,产生单位弹性应变所需载荷的大小。
在其它条件相同时,金属的弹性模量愈高,制成的零件或构件的刚度便愈高,即在外力作用时,保
持其固有形状、尺寸的能力愈强。
2.位错运动的点阵阻力
(1)位错的宽度
{越窄 界面能越低
位错宽度
→平衡宽度
越窄 单位体积弹性畸变能高
刃型位错的形成 刃型位错原子模型
偏离 =b/4(柏氏矢量)时,叫位错宽度 (2)位错运动的点阵阻力 晶体的滑移必须有外力作用→ 位错运动要克服阻力 →位错运动的阻力首先来自的点阵阻力
弹性变形是塑性变形的先行阶段,在塑性变形中还伴生着一定的弹性变形。可以从原子间结合
力的角度了解其物理意义。
发生弹性变形的难易程度取决于作用力 -原子间距曲线的斜率 S0
— 167—
S0 =ddFr=dd2ru2 σ =Sr00ε E =S0
材料科学基础第六章

编辑课件
24
• 6.2.1.4 滑移时晶体的转动:晶体被拉伸而 产生滑移时,由于拉力共线的影响,晶面 位向会发生改变, 结果使滑移面和滑移方向 逐渐趋于平行于拉力轴线;而压缩时,晶 面改变的
• 结果使滑
• 移面逐渐
• 趋于与压
• 力轴线垂
• 直。
编辑课件
25
• 滑移面和滑移方向的改变必然导致斯密特 因子m的改变。
编辑课件
27
编辑课件
28
• 面心立方金属的滑移系为{111}<110>,4个{111} 面构成一个八面体。当拉力轴为[001]时,
• (1) 对所有{111}面, cosφ=02+02+12/(12+12+12·02+02+12)=1/3 φ=54.7º,
• (2) λ角对[101],[101] • [011],[011]也都为45º, • (3) 锥体底面上的两个 • <110>方向与[001]垂 • 直。
编辑课件
29
• 因此,八面体上有8个滑移系具有相同的取 向因子,当τ=τk时可以同时开动。但由于这 些滑移系有不同位向的滑移面和滑移方向 构成,滑移时有交互作用,产生交割和反 应,使滑移变得困难,产生较强的加工硬 化。
• 当两个以上的滑移
• 面沿同一方向滑移
• 便形成交滑移。
编辑课件
30
• 发生交滑移时, • 晶体表面会出现 • 曲折或波纹状的 • 滑移带。 • 最容易发生交滑 • 移的是体心立方 • 金属,滑移面为 • {110},{112}和{123},滑移方向总是<111>。 • 因滑移面不受限制,所以交滑移必是纯螺形位错,
第六章 多晶体的塑性变形
强化手段,可提高材料抗突然超载的能力。
意义:
1)是一种材料强化手段—形变强化;
2)有利于塑性变形均匀进行; 3)有利于金属构件的工作安全性。
28
3.加工硬化的不利
1)影响材料力学性能
不利:使得再变形困难;
使得金属的切削加工,冲压加工带来困难。 解决办法: 在冷加工之间进行中间热处理——再结晶退火。 2)影响材料物理性能和化学性能 不利:电阻增加,导电、导磁性下降; 化学活性增大;耐腐蚀性下降。
b
式中:
Fb S0
MP a
Fb— 指试样被拉断前所承受的最大外力, 即拉伸曲线上b点所对应的外力(N)。 S0 — 试样原始横截面面积(mm2)
37
二、塑性指标( δ%;Ψ %)
定义: 塑性—材料受力后在断裂之前产生塑性变形的能力。 (1)断后伸长率
公式: δ% = (Lu- L0)/L0 ×100%
自由锻
模锻
19
5)冷冲压
(低碳钢、合金钢板材)
20
一、塑性变形的基本概念
1.载荷
(1)定义
金属材料在加工及使用过程中所受的外力。
(2)类型
根据载荷作用性质不同:
a)静载荷 b)动载荷 —没有变化; —瞬间变化;
c)交变载荷—不断变化。
21
根据载荷作用性质不同:
a)拉深载荷 --拉力
b)压缩载荷 —压力
塑性变形前 塑性变形后
3、形变织构产生
金属塑性变形到很大程度(70%以上)时, 由于晶粒发生转动, 使各晶粒的位向 趋近于一致, 形成特殊的择优取向, 这种有序化的结构叫做形变织构。
6.4.2. 塑性变形对金属性能的影响
• (1)形变强化 金属发生塑性变形, 随变形度的增大, 金属 的强度和硬度显著提高, 塑性和韧性明显下降。 • (2)产生各向异性 由于纤维组织和形变织构的形成, 使 金属的性能产生各向异性。
第六章 金属和合金的塑性变形
第六章 金属和合金的塑性变形和再结晶金属材料(包括纯金属和合金)在外力的作用下引起的形状和尺寸的改变称为变形。
去除外力,能够消失的变形,称弹性变形;永远残留的变形,称塑性变形。
工业生产上正是利用塑性变形对金属材料进行加工成型的,如锻造、轧制、拉拔、挤压、冲压等。
塑性变形不仅能改变工件的形状和尺寸,还会引起材料内部组织和结构的变化,从而使其性能发生变化。
以再结晶温度为界,金属材料的塑性变形大致可分为两类:冷塑性变形和热塑性变形,在生产上,通常称为冷加工和热加工。
经冷塑性变形的金属材料有储存能,自由能高,组织不稳定。
若升高温度,使原子获得足够的扩散能力,则变形组织会恢复到变形前的状态,这个恢复过程包括:回复、再结晶和晶粒长大三个阶段。
从金属材料的生产流程来看,一般是先进行热加工,然后才进行冷加工和再结晶退火。
但为了学习的方便,本章先讨论冷加工,再讨论再结晶和热加工。
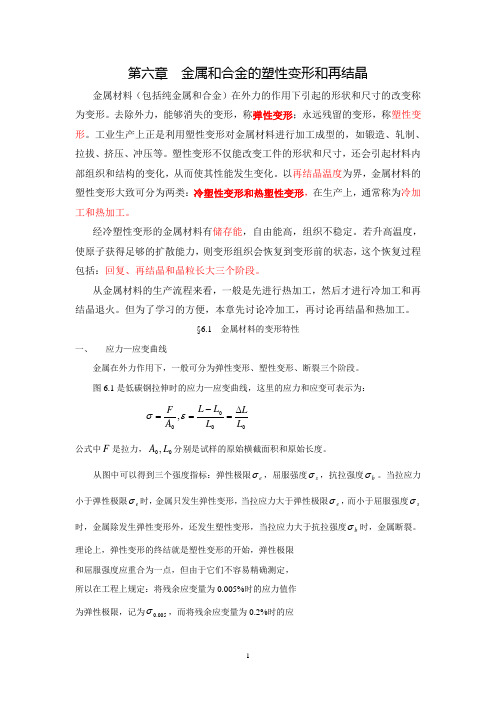
§6.1 金属材料的变形特性一、 应力—应变曲线金属在外力作用下,一般可分为弹性变形、塑性变形、断裂三个阶段。
图6.1是低碳钢拉伸时的应力—应变曲线,这里的应力和应变可表示为:000,L L L L L A F ∆=-==εσ 公式中F 是拉力,00,L A 分别是试样的原始横截面积和原始长度。
从图中可以得到三个强度指标:弹性极限e σ,屈服强度s σ,抗拉强度b σ。
当拉应力小于弹性极限e σ时,金属只发生弹性变形,当拉应力大于弹性极限e σ,而小于屈服强度s σ时,金属除发生弹性变形外,还发生塑性变形,当拉应力大于抗拉强度b σ时,金属断裂。
理论上,弹性变形的终结就是塑性变形的开始,弹性极限和屈服强度应重合为一点,但由于它们不容易精确测定,所以在工程上规定:将残余应变量为0.005%时的应力值作为弹性极限,记为005.0σ,而将残余应变量为0.2%时的应力值作为条件屈服极限,记为2.0σ。
s σ和2.0σ都表示金属产生明显塑性变形时的应力。
第六章 塑性变形习题集-附部分答案
1.简单立方晶体(100)面有1 个[]010=b 的刃位错(a)在(001)面有1 个b =[010]的刃位错和它相截,相截后2 个位错产生扭折结还是割阶? (b)在(001)面有1 个b =[100]的螺位错和它相截,相截后2 个位错产生扭折还是割阶?解:两位错相割后,在位错留下一个大小和方向与对方位错的柏氏矢量相同的一小段位错,如果这小段位错在原位错的滑移面上,则它是扭折;否则是割阶。
为了讨论方便,设(100)面上[]010=b 的刃位错为A 位错,(001)面上b =[010]的刃位错为B 位错,(001)面上b =[100]的螺位错为C 位错。
(a) A 位错与B 位错相割后,A 位错产生方向为[010]的小段位错,A 位错的滑移面是(100),[010]⋅[100]=0,即小段位错是在A 位错的滑移面上,所以它是扭折;而在B 位错产生方向为[ 010 ]的小段位错,B 位错的滑移面是(001), [010]⋅[001]=0 ,即小段位错在B 位错的滑移面上,所以它是扭折。
(b)A 位错与C 位错相割后,A 位错产生方向为[100]的小段位错,A 位错的滑移面是(100),[100]⋅[100]≠0 ,即小段位错不在A 位错的滑移面上,所以它是割阶;而在C 位错产生方向为[]010的小段位错,C 位错的滑移面是(001),[][]0001010=•,即小段位错在B 位错的滑移面上,所以它是扭折。
2.下图表示在同一直线上有柏氏矢量相同的2 个同号刃位错AB 和CD ,距离为x ,他们作F-R 源开动。
(a)画出这2 个F-R 源增殖时的逐步过程,二者发生交互作用时,会发生什么情况?(b)若2 位错是异号位错时,情况又会怎样?解:(a)两个位错是同号,当位错源开动时,两个位错向同一方向拱弯,如下图(b)所示。
在外力作用下,位错继续拱弯,在相邻的位错段靠近,它们是反号的,互相吸引,如上图(c)中的P 处所示。
第6章 金属材料的塑性变形
工程材料学
(2)、晶粒中亚晶粒增多;
因塑性变形时的位错运动、增殖和其间复杂的交互作用,位错密度 增加,产生位错缠结,使晶粒碎化成更小的亚晶粒。
a
b
位错缠结
工程材料学
(3)、产生形变织构
工程材料学
工程材料学
再结晶过程中显微组织的变化
1、再结晶温度: T = 0.4Tm
工程材料学
再结晶过程中显微组织的变化
冷加工(35%变形)后晶粒
580C加热3秒钟后出现非常细小的晶粒
工程材料学
再结晶过程中显微组织的变化
580C加热4秒后,部分变形区域的 晶体被再结晶晶粒取代
580C加热8秒后,再结晶晶粒全部 取代了变形晶粒
工程材料学
再结晶过程中显微组织的变化
580C加热15分后,晶粒长大
700C加热10分后,晶粒变的粗大
工程材料学
再结晶过程中显微组织的变化
(a)
(b)
(c)
铝合金板材经过85%的冷加工并加热后的组织,(a) 85% 冷加工的组织;(b)在302℃1小时的组织,此时可见组织中 开始再结晶;(c)316℃加热1小时的组织,可见再结晶的晶 粒及未发生再结晶的晶粒。
工程材料学
部分FCC、BCC及HCP晶体的滑移系
晶体结构 FCC:Cu, Al, Pb, Au, Ag, -Fe BCC: -Fe, W, Mo, -黄铜 -Fe,Mo,W,Na -Fe, K HCP: Cd, Zn, Mg, Ti, Be 滑移面 {111} {110} {211} {321} [0001] 滑移方向 <110> <111> <111> <111> <1120> 滑移系数量 4X3=12 6X2=12 12X1=12 24X1=24 1X3=3
材料科学基础-第6章塑性变形2
Recovery - A low-temperature annealing heat treatment designed to eliminate residual stresses introduced during deformation without reducing the strength of the coldworked material. Recrystallization - A medium-temperature annealing heat treatment designed to eliminate all of the effects of the strain hardening produced during cold working. Grain growth - Movement of grain boundaries by diffusion in order to reduce the amount of grain boundary area.
Section 6.3 回复与再结晶
经过冷塑性变形的材料,空位、 经过冷塑性变形的材料,空位、位借等晶体缺陷大量增 产生一定的残余内应力,组织发生了明显的变化。 加,产生一定的残余内应力,组织发生了明显的变化。 材料的能量升高,使其在热力学上处于亚稳状态, 材料的能量升高,使其在热力学上处于亚稳状态,有自 发向稳定态转化的趋势,储存能是转化过程的驱动力。 发向稳定态转化的趋势,储存能是转化过程的驱动力。 在常温下,由于原子的活动能力较弱, 在常温下,由于原子的活动能力较弱,原子的扩散困难 这种变化极为缓慢。如果温度升高, ,这种变化极为缓慢。如果温度升高,原子具有足够的 活动能力,扩散速度显著增加,那么, 活动能力,扩散速度显著增加,那么,冷变形材料就会 由亚稳定状态向稳定状态转变, 由亚稳定状态向稳定状态转变,从而引起一系列组织和 性能的变化。 性能的变化。 根据其显微组织及性能的变化情况, 根据其显微组织及性能的变化情况,可将这种变化分为 三个阶段:回复、再结晶和晶粒长大。 三个阶段:回复、再结晶和晶粒长大。
第六章材料科学基础
§6.1.1 普弹性
图 弹性变形与塑性变形
普弹性:应力与应变间符合线性关系,即满足虎克定律;
加上或去除应力时应变都能瞬时达到平衡
弹性的实质是原子作用势 的不对称性。
可以用双原子模型来解释。
图 双原子模型
弹性变形的主要特点是: (1)可逆性 去掉外力,变
s k s cos cos
τk称为临界分切应力,与金属 的晶体结构、纯度、加工状 态、试验温度与加载速度有 关,而与外力的大小、方向 及作用方式无关。
图 镁单晶屈服应力与晶体取向的关系
k取决于金属的本性,不受,的影响; 或=90时,s ;
k=scoscos s的取值 ,=45时,s最小,晶体易滑移;
形就消失。 (2)线性 应力和应变间满
足直线关系。 (3)弹性变形量小 一般说
来,金属材料和陶瓷材料 的弹性变形很小,高聚物 材料的弹性变形可以比较 大。
E G
G E
2(1 )
弹性模量是材料结合强度的标志之一。主要的影响因素有: (1)结构 弹性模量与原子序数呈周期性变化趋势。 (2)温度的影响 T升高,热振动加剧,晶格势能发生变
螺位错的双交滑移:交滑移后的螺位错再转回到原滑移面的过程。
9. 滑移的表面痕迹 单滑移:
单一方向的滑移带; 多滑移:
相互交叉的滑移带; 交滑移:
波纹状的滑移带。
滑移的位错机制
① 位错的运动是晶体的滑移 滑移是位错在切应力作用下沿着滑移面逐步移动形成的。
② 位错的增殖——弗兰克-瑞德位错源 ③ 位错的交割与塞积
图 工业纯铜中的滑移线
滑移:在切应力作用下,晶体的一部分相 对于另一部分沿着一定的晶面(滑移面) 和晶向(滑移方向)产生相对位移,且不 破坏晶体内部原子排列规律性的塑变方式。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
§6.2.2 孪生
晶体塑性变形的另一种常见方式。
指在切应力作用下,晶体的一部分沿一定的晶面(孪生面)和一定的 晶向(孪生方向)相对于另一部分发生均匀切变的过程。
27
§6.4.2 多相合金的塑性变形
塑性变形取决于:
①基体相性质
②第二相的性质、形状、大小、数量和分布等 ——在塑性变形中往往起着决定性作用
常按第二相的尺度大小将其分为两大类: 聚合型:第二相尺寸与基体相尺度属同一数量级,如图1所示; 弥散型:第二相尺寸非常细小,并且弥散分布于基体相中,如图2所示。
①位错运动的阻力首先来自于点阵阻力,派尔斯(Peierls)和纳巴罗( Nabarro)首先估算了这个力,所以又称为派-纳力(P-N力),它相当于简单立 方晶体中刃型位错运动所需要的临界分切应力:
式中:d为滑移面的面间距,b为滑移方向上的点阵间距,ν为泊松比。 采用上式,我们可以简单推算晶体的切变强度,对于简单立方结构,存在d = b,对 金属,取ν =0.3,可得τP-N=3.6×10-4G,比刚性模型理论计算值(约G/30)小得多, 接近临界分切应力实验值。
图1 聚合型合金组织-Al青铜
图2 弥散型第二相合金组织-铁黄铜
§6.4.2 多相合金的塑性变形
(1)聚合型两相合金的塑性变形
对聚合型两相合金而言,如果两个相都具有塑性,则合金变形阻力决定 于两相的体积分数。
σ m = f1σ 1 + f2σ 2
ε m = f1ε 1 + f2ε 2
上式f1、f2分别为两个相的体积分数,σ 1、σ 2分别为两个相在此应变时
图 工程应力-应变示意图
§6.1.1 工程应力-应变曲线
弹性变形-塑性变形-断裂
4
§6.1.2 真应力-真应变曲线
为了得出真实的变形特性,应当按 真应力和真应变来进行分析。
T
P A
式中: P-作用在试样上的载荷; A-试样的实际横截面积。
A0l0 Al 常数
图 真应力应变曲线
§6.2 单晶体的塑性变形
放置一段时间或200℃加热后再加载出现屈服,且强度会有所提高。
3)原因:柯氏气团的存在、破坏和重新形成。
26 图 低碳钢的屈服现象
§6.4.1固溶体的塑性变形
(3)固溶强化的影响因素
不同溶质原子引起的固溶强化效果是不同的,其影响因素很多,主要有 以下几个方面:
①溶质原子的浓度----浓度越高,一般其强化效果也越好,但并不 是线性关系,低浓度时显著;
晶粒越多,变形分散在更多的晶粒内进 行,且每个晶粒中塞积的位错少,由应力 集中导致的开裂机会减少,可承受更大的 变形量,表现出高塑性。
细晶粒材料中,应力集中小,裂纹不易 萌生;晶界多,裂纹扩展曲折,在断裂过 程中24可吸收较多能量,表现高韧性。
§6.4 合金的塑性变形
§6.4.1固溶体的塑性变形
以孪生方式塑变
密排六方结构的晶体,如锌、镁、镉等----滑移系较少。
体心立方和面心立方晶体,变形温度很低,形变速度 极快,以及其它原因使滑移难以进行,都可能出现。
a. 变形前
b. 滑移
c. 孪生
图 晶体滑移和孪生变形后的结构与外形变化示意图
§6.2.2 孪生
以面心立方为例, 说明孪生的具体过程:
假设晶体内局部地区(面AH与GN之
间)的若干层(111)面间沿[112]方向
产生一个切动距离a/6[112]的均匀
切变,即可得到如图所示情况。
(a)孪晶面与孪生方向 (b)孪生变形时晶面移动情况 图 面心立方晶体孪生变形示意图
b=a/6[112]
§6.2.2 孪生
孪生的晶体学
孪生面 A1{111},A2{112},A3{1012} 孪生方向 A1<112>,A2<111>,A3<1011>
§6 材料的塑性变形
第一节 金属的应力-应变曲线 第二节 单晶体的塑性变形 第三节 多晶体的塑性变形 第四节 合金的塑性变形 第五节 塑性变形对材料组织和性能的影响
1
§6 材料的塑性变形
材料的力学性能实质上是根据材料在外力作用下所表现的变 形行为来评定的。
强度----抵抗变形和断裂的能力。
决定工件的加工性能
几何软化;,接近45,滑移变得容易。
11
§6.2.1 滑移
(5) 多滑移与交滑移
1)多(双)滑移
----在多(两)个滑移系上同时或交替进行的滑移。 现象:形成两组或多组交叉滑移线。 特点:滑移变形抗力提高。比单滑移困难。
2)交滑移
----晶体在两个或多个不同滑移面上沿同一滑移方向进行的滑移。
机制:
螺位错的交滑移:螺位错 从一个滑移面转移到与之 相交的另一滑移面的过程; 螺位错的双交滑移:交滑 移后的螺位错再转回到原 滑移面的过程。
12
§6.2.1 滑移
(6)滑移的表面痕迹
单滑移 ----单一方向的滑移带; 多滑移 ----相互交叉的滑移带; 交滑移 ----波纹状的滑移带。
13
当上式中的分切应力达到临界值时,晶面间的
滑移开始,这时F/A应当等于σ s,即:
s s cos cos
τs--临界分切应力
9
§6.2.1 滑移
(3)临界分切应力
s=scoscos
c取决于金属的本性,不受,的影响;
s的取值
或=90时,s
;
,=45时,s最小,晶体易滑移;
的流变应力;ε 1、ε 2分别为两个相在此应力时的应变。 由上两式可见,只有第二相为较强的相时,合金才能强化。
第二相为硬脆相时,合金的性能取决于
相的相对量
硬脆相的形状、尺寸和分布
——很大程度取决
§6.4.2 多相合金的塑性变形
§6.2.1 滑移
(7)滑移的位错机制
晶体的滑移是借助于位错在滑移面上的运动来逐步进行的。位错就是已滑移 区和未滑移区间的界线。 以刃型位错为例:
螺型位错的运动同样能导致晶体滑移。
§6.2.1 滑移
(7)滑移的位错机制
宏观上标志晶体滑移进行的临界分切应力应当与微观上克服位错运动阻力的外 力相等。对纯金属而言,位错运动的阻力主要包含以下几方面:
弹性变形与塑性变形 常温下塑性变形的主要方式:滑移、孪生、扭折。
§6.2.1 滑移
(1)滑移现象
将抛光的单晶体试 样进行适当塑性变形
光镜观察到许多相互平行线---滑移带(无重现性)。
电境观察到滑移带中还有更细的 相互平行线----滑移线。
图 滑移带形成示意图
6
§6.2.1 滑移
(2) 滑移系
导致晶体产生变形的位错滑移在晶界处受阻,如图2所示。
图1 双晶拉伸
图2 位错塞积
§6.3 多晶体的塑性变形
3)晶粒大小与性能的关系
(a)晶粒越细,强度越高(细晶强化:霍尔-配奇公式)
s=0+kd-1/2 (Hall-Patch)
原因:晶粒越细,晶界越多,位错运动的阻力越大。
(b)晶粒越细,塑韧性提高
几何要素
滑移面 (密排面) 滑移方向(密排方向)
滑移系 = 滑移面 + 滑移方向(滑移面上)。
滑移系的个数 = 滑移面个数×每个面上所
具有的滑移方向的个数
7 图 面心立方晶体中的滑移系
§6.2.1 滑移
(2) 滑移系
1) fcc: {111} × <110>,n=12个。
2)bcc
低温时多为: {112} × <111>, n=12个; 中温时多为: {110} × <111>, n=12个; 高温时多为: {123} × <111>, n=24个。
图 锌的单晶体与多晶体的应力-应变曲线 21
§6.3 多晶体的塑性变形
(1)晶粒之间变形的传播
位错在晶界塞积 应力集中 相邻晶粒位错源开动 相邻 晶粒变形 塑变
(2)晶粒之间变形的协调性
1)原因:各晶粒之间变形具有非同时性。 2)要求:各晶粒之间变形相互协调(独立变形会导致晶体分裂) 3)条件:独立滑移系5个。(保证晶粒形状的自由变化)
图 锌晶体中的形变孪晶
18
§6.2.2 孪生
孪生变形的特点
相同点 晶体位向
位移量 不 对塑变的贡献 点
变形应力 变形条件
滑移
孪生
1 切变;2 沿一定的晶面、晶向进行;3 不改变结构。
不改变(对抛光面观察无 重现性)。
滑移方向上原子间距的整 数倍,较大。
很大,总变形量大。
改变,形成镜面对称关系(对抛 光面观察有重现性)
3)hcp:
当c/a接近或大于1.633时,
{0001} × <1120>, n=3个
当c/a小于1.633时,
{1010} × <1120>, n=3个
{1011} × <1120>, n=6个
8
§6.2.1 滑移
(3)临界分切应力
设:
F--轴向拉伸载荷,A--横截面积, φ--滑移面法 线与中心轴线夹角,λ--滑移方向与外力F夹角, 滑移方向上的分切应力为:
小于孪生方向上的原子间距, 较小。
有限,总变形量小。
有一定的临界分切压力 一般先发生滑移
所需临界分切应力远高于 滑移 滑移困难时发生
变形机制
全位错运动的结果
不全位错运动的结果
§6.2.3 晶体的扭折
扭折现象----当受力的晶体处于不能进行滑移或孪生的某种 取向时,它可能通过不均匀的局部塑性变形来适应所作用的外 力。(图1)