三阶系统的阶跃响应曲线的数据
三阶系统时域频域分析及校正

c)
Kc=3时,校正后单位阶跃响应曲线
x 10
22
Step Response
8 6 4 2 0
System: g0b Time (seconds): 99.3 Amplitude: 7.53e+22
Amplitude
-2 -4 -6 -8 -10 -12
System: g0b Time (seconds): 100 Amplitude: -1.14e+23
三、 进度计划
序号 设计内容 下发课程设计任务书,介绍课程设计的要求,介绍 MATLAB 软件及控制系统工具箱用法的基本知识。 完成时间 备注
1
1 月 19 日上午 (周一上午) 1 月 22 日 (周四) 1 月 23 日(周五)
2
利用 MATLAB 软件按任务书的要求进行控制系统分析和 校正设计,并撰写设计报告。
time=[0:0.01:200]; Kc=0.01; g0=zpk([],[0 -2 -5],50*Kc); g0b=feedback(g0,1); figure(1); step(g0b,time); grid; Kc=0.5; g0=zpk([],[0 -2 -5],50*Kc); g0b=feedback(g0,1); figure(2); time=[0:0.01:50]; step(g0b,time); grid; Kc=3; g0=zpk([],[0 -2 -5],50*Kc); g0b=feedback(g0,1); figure(3); time=[0:0.01:100]; step(g0b,time); %Kc=3时,校正后系统单位阶跃响应 %Kc=0.5时,校正后系统单位阶跃响应 %Kc=0.01时,校正后系统单位阶跃响应
自动控制原理 第三章 控制系统的时域分析—3高阶系统时域分析
ct 1 a1 exp nt cos d t a2 exp nt sind t a3 exp Pt
其中: d n 1 2
2
ct 1 a1 exp ntcosdt a2 exp ntsin dt a3 exp Pt
三阶 系统
ct
1
e
xp
n
t
cosd
t
1
2
s
ind
t
二阶 系统
从以上分析中看出,极点的类型决定了输出情况 ❖系统稳定 所有极点在s-p左半面(全为“左根”)
两者相比,仅仅是多了一项由新增极点确定的衰减项
1
a3 b 2 b 21
a3 0 a3 exp Pt 0
b 2 b 21 2 b 12 1 2 0
新增极点引发的自由运动模态项对过渡过程的影响是:
使最大超调减小,使调节时间增加
3
1.闭环极点对过渡过程的影响 s1,2 n jn 1 2
首先讨论典型三阶系统的瞬态响应,然后进行更具一般形式 的高阶系统的瞬态响应分析。从下面的讨论中,可以看到:
高阶系统的瞬态响应是由若干个一阶系统和二阶系 统的瞬态响应线性叠加而成。
1
1.三阶系统的单位阶跃响应
典型三阶系统的闭环传函可表示成:
(s)
C(s) R(s)
(s
P)(s2
Pn 2 2ns
n2 )
3-4 高阶系统的时域分析
由二阶以上微分方程描述的控制系统称为高阶系统。工 程上,高阶系统是普遍存在的。本节的目的不在于研究高阶 系统的过渡过程本身,而在于通过对三阶系统在单位阶跃函 数作用下的过渡过程讨论,引出闭环主导极点的概念。以便 将高阶系统在一定条件下转化为具有一对闭环主导极点的二 阶系统进行分析研究。
实验四三阶系统的瞬态响应及稳定性分析

实验四三阶系统的瞬态响应及稳定性分析引言:实际工程中经常遇到三阶系统,对三阶系统的瞬态响应及稳定性进行分析能够帮助我们更好地设计和优化控制系统。
本实验旨在通过实验,研究三阶系统的瞬态响应及稳定性,并加深对其理论知识的理解和掌握。
实验一:三阶系统的瞬态响应1.实验目的:通过三阶系统的瞬态响应实验,观察系统的输出响应情况,了解系统的动态特性。
2.实验仪器:示波器、波形发生器、三阶系统实验箱3.实验原理:三阶系统的瞬态响应是指系统在初始状态发生突变时,输出的响应情况。
三阶系统的瞬态响应主要涉及到系统阶跃响应、系统脉冲响应。
4.实验步骤:a.将波形发生器的正弦波信号输入三阶系统实验箱。
b.设置示波器的观测通道,将示波器的探头连接到三阶系统实验箱的输出端口。
c.调节波形发生器的频率和幅度,观察示波器上得到的输出响应波形。
5.数据处理:a.根据示波器上输出的响应波形,可以观察到系统的超调量、调整时间等指标,根据公式可以计算得到这些指标的具体数值。
b.将实验得到的数据记录下来,进行分析和比较。
1.实验目的:通过三阶系统的稳定性分析实验,了解系统的稳定性及稳定性判据。
2.实验仪器:示波器、三阶系统实验箱3.实验原理:三阶系统的稳定性是指系统在初始状态发生突变或受到外部扰动时,系统是否能够回到稳定状态。
常见的稳定性分析方法包括极点判据、频率响应法等。
4.实验步骤:a.将示波器的探头连接到三阶系统实验箱的输出端口。
b.调节系统的输入信号,观察示波器上得到的系统输出响应波形。
c.根据观察到的输出波形,分析系统的稳定性。
5.数据处理:a.根据实验得到的数据和观察到的波形,可以从输入输出关系中提取出系统的稳定性信息,比如振荡频率、稳定的输出值等。
b.根据提取出的信息,判断系统的稳定性。
实验三:实验结果和分析1.通过实验一,我们可以观察到三阶系统的瞬态响应,并根据输出波形,计算得到系统的超调量、调整时间等指标。
通过对比不同输入频率和幅度下的响应波形,可以分析系统的动态特性。
控制工程基础实验指导书(答案) 2讲解
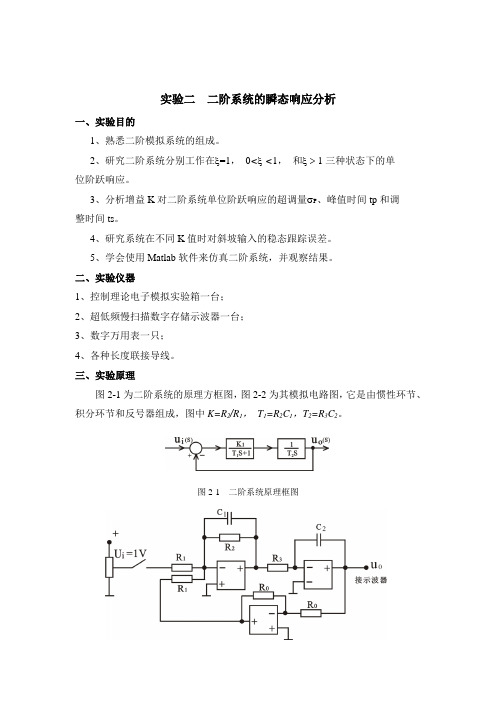
实验二二阶系统的瞬态响应分析一、实验目的1、熟悉二阶模拟系统的组成。
2、研究二阶系统分别工作在ξ=1,0<ξ<1,和ξ> 1三种状态下的单位阶跃响应。
3、分析增益K对二阶系统单位阶跃响应的超调量σP、峰值时间tp和调整时间ts。
4、研究系统在不同K值时对斜坡输入的稳态跟踪误差。
5、学会使用Matlab软件来仿真二阶系统,并观察结果。
二、实验仪器1、控制理论电子模拟实验箱一台;2、超低频慢扫描数字存储示波器一台;3、数字万用表一只;4、各种长度联接导线。
三、实验原理图2-1为二阶系统的原理方框图,图2-2为其模拟电路图,它是由惯性环节、积分环节和反号器组成,图中K=R2/R1,T1=R2C1,T2=R3C2。
图2-1 二阶系统原理框图图2-1 二阶系统的模拟电路由图2-2求得二阶系统的闭环传递函1222122112/() (1)()/O i K TT U S K U S TT S T S K S T S K TT ==++++ :而二阶系统标准传递函数为(1)(2), 对比式和式得n ωξ==12 T 0.2 , T 0.5 , n S S ωξ====若令则。
调节开环增益K 值,不仅能改变系统无阻尼自然振荡频率ωn 和ξ的值,可以得到过阻尼(ξ>1)、临界阻尼(ξ=1)和欠阻尼(ξ<1)三种情况下的阶跃响应曲线。
(1)当K >0.625, 0 < ξ < 1,系统处在欠阻尼状态,它的单位阶跃响应表达式为:图2-3 0 < ξ < 1时的阶跃响应曲线(2)当K =0.625时,ξ=1,系统处在临界阻尼状态,它的单位阶跃响应表达式为:如图2-4为二阶系统工作临界阻尼时的单位响应曲线。
(2) +2+=222nn nS S )S (G ωξωω1()1sin( 2-3n to d d u t t tgξωωωω--=+=式中图为二阶系统在欠阻尼状态下的单位阶跃响应曲线etn o n t t u ωω-+-=)1(1)(图2-4 ξ=1时的阶跃响应曲线(3)当K < 0.625时,ξ> 1,系统工作在过阻尼状态,它的单位阶跃响应曲线和临界阻尼时的单位阶跃响应一样为单调的指数上升曲线,但后者的上升速度比前者缓慢。
三阶系统的单位阶跃响应主导极点
第三章 线性系统的时域分析法
3
卢p45
1.三阶系统的单位阶跃响应
极点对三阶系统系统性能的影响
两个复数极点闭环主 P3> n 导极点 -p3 附加闭环极点 三阶简化为二阶
极点愈靠近虚轴,其 对应分量的衰减愈慢, 即起主导作用
-p3向虚轴移动,超调 量,上升时间,调 节时间。 单调响应,无超调量
n
PD阻尼比d
二阶系统
t sr t cs (t ) 2 / n
第三章 线性系统的时域分析法
R(s)=1/s2
R( s) E ( s) 2 n (s 1) 1 s ( s 2 n )
esr lim sE ( s) 2 / n
s 0
8
卢p49
3. 扰动作用下的系统瞬态分析
带零点的二阶闭环系统-PD控制
增大阻尼比,减少 超调量,但也导致 稳态误差的增大。
输出比例加微分 PD 负反馈的系统 相同-超调量降低 优势-稳态误差不变 带零点的二阶闭环系统-PD控制
稳态误差 - tsr
2 n (s 1) G( s ) 2 2 s 2( ) s n n 2
Cd ( s ) T1s 1 K1K 2 / T1 D( s ) K1 s 2 s / T1 K1 K 2 K b / T1 稳态误差 K b K1K 2 / T1 (T1s 1) 1 K1 K b s 2 s / T1 K1 K 2 K b / T1
2 2
0<<1
=-1/
e nt l c(t ) 1 sin( d t ) (t 0) 2 z 1
零点与闭环复数极点相距愈远,零点影响愈小, 系统则与不带零点的系统响应相同。
六个典型环节的阶跃响应曲线详解

六个典型环节的阶跃响应曲线详解1. 引言在信号处理领域中,阶跃响应曲线是描述系统对单位阶跃输入信号的输出响应的一种常用方法。
通过分析阶跃响应曲线,我们可以了解系统的动态特性、稳态误差和稳定性等重要信息。
本文将详细探讨六个典型环节的阶跃响应曲线,以帮助读者更好地理解信号处理中的阶跃响应。
2. 一阶惯性环节让我们来讨论一阶惯性环节的阶跃响应曲线。
一阶惯性环节由一个惯性成分和一个系数组成,其传递函数可以表示为G(s) = k / (τs + 1),其中k为增益,τ为时间常数。
在阶跃输入信号下,一阶惯性环节的输出响应会经历一个指数衰减的过程。
初始阶段,响应曲线呈现出较大的上升斜率,接近输入信号的增量。
随着时间的推移,响应逐渐趋于稳定的平衡状态。
通过观察阶跃响应曲线的时间常数τ,我们可以推断系统的动态特性以及稳态稳定性。
3. 一阶积分环节接下来,我们将研究一阶积分环节的阶跃响应曲线。
一阶积分环节的传递函数可以表示为G(s) = k / s,其中k为增益。
与一阶惯性环节不同,一阶积分环节的阶跃响应曲线呈现出线性增长的特点。
输出信号随时间的增加而持续积分,并逐渐达到稳态。
在实际应用中,一阶积分环节常用于控制系统中,以改善系统的稳定性和对常数误差的补偿。
4. 一阶滞后环节第三个环节是一阶滞后环节,其传递函数可以表示为G(s) = k / (τs + 1),其中k为增益,τ为时间常数。
一阶滞后环节的阶跃响应曲线表现出一种惰性的特点。
初始阶段,响应曲线的上升斜率较小,逐渐接近输入信号的增量。
随着时间的推移,响应曲线逐渐逼近稳定的平衡状态。
一阶滞后环节常用于减小系统的动态响应,并提高稳态精度。
5. 二阶过阻尼环节接下来,我们将研究二阶过阻尼环节的阶跃响应曲线。
二阶过阻尼环节的传递函数可以表示为G(s) = k / (τ^2s^2 + 2ζτs + 1),其中k为增益,τ为时间常数,ζ为阻尼比。
二阶过阻尼环节的阶跃响应曲线表现出较小的震荡和较快的收敛特性。
自动控制原理第三节2_高阶系统
例如:(s)
(s2
n2(s z) 2 ns n2 )(s
p)
如果: z 5以及 p 5
n
n
z p
则:
(s)
p(s2
z n 2 2 ns n2 )
n
j d jd
说明:假设输入为单位阶跃函数,则化简前后的稳态值如下
lim s 1 s (s2
s0
n2(s z) 2 ns n2 )(s
[例如]: p1,2 1 n1 jn1
1
2 1
jd
为某高阶系统
的主导极点,则单位阶跃响应近似为:
c(t) a0 et (1 cosdt 1 sin dt)
利用主导极点的概念可以对高阶系统的特性做近似的估计分析。 高阶系统近似简化原则: 在近似前后,确保输出稳态值不变;
在近似前后,瞬态过程基本相差不大。
阶系统的单位阶跃响应取决于闭环系统的零、极点分布。
[定性分析]:
对于闭环极点全部位于s左半平面的高阶系统(否则系统不 稳定),极点为实数(指数衰减项)和共轭复数(衰减正弦项) 的衰减快慢取决于极点离虚轴的距离。远,衰减的快;近,衰 减的慢。所以,近极点对瞬态响应影响大。
高阶系统分析,主导极点
系数 a j , l , l 取决于零、极点分布。有以下几种情况: 若极点远离原点,则系数小; 极点靠近一个零点,远离其他极点和零点,系数小; 极点远离零点,又接近原点或其他极点,系数大。
C(s)
(s)
1 s
(s2
n2 p3 2 ns n2 )(s
p3 )
1 s
1 s
s2
A1s A2
2 ns n2
s
A3 p3
式中:A1, A2 , A3 系)有关。
3-3 线性系统的时域分析-3(4,5)
(图3-27三阶系统的单位阶跃响应曲线 ζ=0.5)
chpt3
4
二、高阶系统的单位阶跃响应 (图3-28控制系统) 其闭环传递函数
( s)
C ( s) G( s) R( s ) 1 G ( s ) H ( s )
M ( s ) b0 s m b1s m 1 bm 1s bm D( s ) a0 s n a1s n 1 an 1s an K ( s zi )
1、 赫尔维茨稳定判据 线性系统稳定的必要条件:线性系统特征方程的各项系数 为正数。 特征方程:
D(S ) a0 s a1s
n
n1
.... an 0
n n n a3 a1 a2 si , si s j , si s j a0 a0 i , j 1 a0 i 1 i , j , k 1 i j i j k n an ........, (1)n si a0 i 1
chpt3 13
二、线性系统稳定的充分必要条件
以脉冲响应为例:
lim c(t ) 0
t
即输出增量收敛于原平衡工作点,则线性系统 是稳定的。
chpt3
14
输出量:
C (S )
K ( s zi )
i 1
m
(s s ) (s
j 1 j k 1
q
r
2
2 k k s k )
chpt3
100%
10
3、 调节时间的计算
1 2 ts ln n
si s1 zi i 2 i 1 n m s1 si zi i 2 i 1
自动控制原理实验
2014-2015学年第二学期自动控制原理实验报告姓名:王丽学号:20122527班级:交控3班指导教师:周慧实验一:典型系统的瞬态响应和稳定性1. 比例环节的阶跃响应曲线图(1:1)比例环节的阶跃响应曲线图(1:2)2. 积分环节的阶跃响应曲线图(c=1uf)3. 比例积分环节的阶跃响应曲线图(c=1uf)比例积分环节的阶跃响应曲线图(c=2uf)4. 惯性环节的阶跃响应曲线图(c=1uf)惯性环节的阶跃响应曲线图(c=2uf)5. 比例微分环节的阶跃响应曲线图(r=100k)比例微分环节的阶跃响应曲线图(r=200k)6. 比例积分微分环节的阶跃响应曲线图(r=100k)比例积分微分环节的阶跃响应曲线图(r=200k)实验结论1. 积分环节的阶跃响应曲线图可以看出,积分环节有两个明显的特征:(1)输出信号是斜坡信号(2)积分常数越大,达到顶峰需要的时间就越长2. 比例积分环节就是把比例环节与积分环节并联,分别取得结果之后再叠加起来,所以从图像上看,施加了阶跃信号以后,输出信号先有一个乘了系数K的阶跃,之后则逐渐按斜坡形式增加,形式同比例和积分的加和是相同的,因而验证了这一假设。
3. 微分环节对于阶跃信号的响应,在理论上,由于阶跃信号在施加的一瞬间有跳变,造成其微分结果为无穷大,之后阶跃信号不再变化,微分为0,表现为输出信号开始衰减。
4. PID环节同时具备了比例、积分、微分三个环节的特性,输出图像其实也就是三个环节输出特性的叠加。
三个环节在整个系统中的工作实际上是相互独立的,这也与它们是并联关系的事实相符合。
5.惯性环节的传递函数输出函数:可以看到,当t→∞时,r(t)≈Ku(t),这与图中的曲线是匹配的。
实验心得通过本实验我对试验箱更加熟悉,会连接电路;更直观的看到电路的数学模型和电路的响应曲线图三者之间的关系,这让我能够将在此之前所学的知识联系到一起。
不管是什么电路,如果要研究它首先就是得到它的数学模型,然后再通过对数学模型的研究间接的来研究该电路。
自控实验—二、三阶系统动态分析
实验二.二、三阶系统动态分析一.实验目的:1.学习二、三阶系统的电模拟方法及参数测试方法;2.观察二、三阶系统的阶跃响应曲线,了解参数变化对动态特性的影响; 3.学习虚拟仪器(超抵频示波器)的使用方法; 4.使用MATLAB 仿真软件进行时域法分析; 5.了解虚拟实验的使用方法。
二.实验设备及仪器1.模拟实验箱; 2.低频信号发生器;3.虚拟仪器(低频示波器); 4.计算机;5.MATLABL 仿真软件。
三.实验原理及内容实验原理:1、二阶系统的数学模型系统开环传递函数为系统闭环传递函数为2、 二阶系统暂态性能(a) 延迟时间t d : 系统响应从 0 上升到稳态值的 50% 所需的时间。
)2s (s n 2nςω+ω为阻尼比(,为无阻尼自然振荡频率其中:ςωω+ςω+ω==n 2nn 22ns 2s )s (G )s (R )s (C(b) 上升时间t r : 对于欠阻尼系统是指 , 系统响应从 0 上升到稳态值所需的时间 ; 对于过阻尼系统则指 , 响应从稳态值的 10% 上升到 90% 所需的时间。
(c) 峰值时间t p : 系统响应到达第一个峰值所需的时间。
(d) 最大超调量σp ( 简称超调量 ) : 系统在暂态过程中输出响应超过稳态值的最大偏离量。
通常以单位阶跃响应稳态值的百分数来表示 , 即%100e e esin 1e)t sin(1e1)y(t )y()y()y(t σ22pn pn pn 11t 2t p d 2t p p p ⨯===-=+--=-=∞∞-=-------ζπζζπζζωζωζωϕζϕωζ超调量)t sin(1e 1)t (y d 2tn ϕωζζω+--=- 2n d p d 1ωπωπt 0)t sin()t (y ζω-==∴= 峰值时间求导可得对dr t t ωπt 1y(t)rϕ-=== 可令2n21n πϕωξ-=-t ≈n2d n d 2.06.01t 7.01ως+ς+ως+≈或n2d n d2.06.01t 7.01t ως+ς+≈ως+≈或(e) 调节时间t s : 系统响应到达并不再越出稳态值的容许误差带±Δ所需的最短时间 , 即通常取Δ为稳态值的 5% 或 2% 。