柔性空间机械臂振动抑制的模糊终端滑模控制
移动机械臂的模糊滑模控制研究的开题报告
移动机械臂的模糊滑模控制研究的开题报告一、选题背景:随着工业化的快速发展,机械臂已成为现代工业生产的重要设备之一。
移动机械臂除了具有普通机械臂的功能外,还具有移动性能,能够在不同的工作区域内完成各种工业任务。
然而,移动机械臂的运动控制一直是一个复杂的问题。
传统的控制方法通常采用PID控制或者模糊控制等简单的方法,无法满足高精度、高稳定性和高鲁棒性的需求。
因此,需要研究一种新的控制方法,以提高移动机械臂的运动控制性能。
二、选题内容:本文旨在研究一种新的控制方法——模糊滑模控制方法,并将其应用于移动机械臂的运动控制中。
具体来说,研究内容包括以下几个方面:1. 移动机械臂的运动学建模和动力学建模。
2. 模糊理论基础的学习与研究,包括模糊控制和模糊滑模控制方法。
3. 基于模糊滑模控制方法的移动机械臂控制系统设计、实现和仿真。
4. 实验比较模糊滑模控制方法与传统控制方法的运动控制性能,包括稳定性、精度和鲁棒性等方面的指标。
三、研究意义:移动机械臂作为现代工业生产的重要设备,其运动控制性能直接影响到生产效率和质量。
本研究采用模糊滑模控制方法,可以提高移动机械臂的运动稳定性和精度,同时还能够克服传统控制方法中存在的多点失效和鲁棒性差等问题。
因此,本研究对于提高移动机械臂的运动控制性能具有实际应用价值和重要意义。
四、研究方法:本研究采用理论分析和实验仿真相结合的方法,具体包括以下几个步骤:1. 研究移动机械臂的运动学和动力学特性,建立相应的数学模型。
2. 学习模糊理论基础,包括模糊控制和模糊滑模控制方法。
3. 设计基于模糊滑模控制方法的移动机械臂控制系统,包括控制器的设计和实现。
4. 对比实验,比较模糊滑模控制方法与传统控制方法的运动控制性能,包括稳定性、精度和鲁棒性等方面的指标。
五、预期成果:本研究预计可以获得以下成果:1. 移动机械臂运动学和动力学模型的建立。
2. 模糊理论基础的学习和应用,包括模糊控制和模糊滑模控制方法的分析和研究。
柔性空间机械臂振动抑制的模糊终端滑模控制
.
国 家 自然 科学 基 金 资 助项 目( 号 : 0 7 0 0 编 16 2 4 ) 收稿 日期 : 0 9 1 - 6 修 改稿 收 到 日期 :0 91 — 1 2 0 — 12 ; 2 0 — 2 3
42 8
振
动、 测
中 图分 类 号 TP2 1 03 3 7 THl 3 1 4 1 . 1.
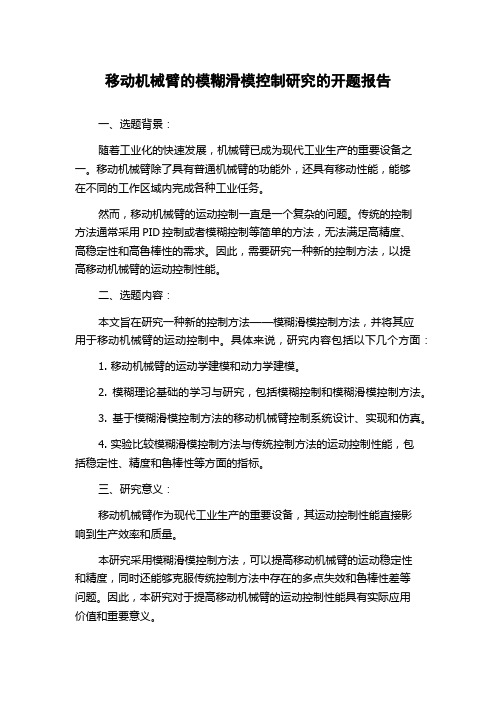
间机 械 臂系统 结构 见 图 1 。
引 言
空 间 机 械 臂 的 研 究 受 到 了研 究 人 员 的广 泛 重
视[ 。 1 由于所处 空间环 境 的特殊性 , 间机 械臂 与载 ] 空
体 之间 存 在着 强烈 的 动力 学 耦合 作 用 , 因此其 动力 学与控 制远 较地 面 固定 机 械臂 复杂 L 。与刚 性空 间 2 ]
实 了本 文 控 制 方 法 的有 效 性 。
1 柔 性 空 间 机 械 臂 系 统 动 力 学 分 析
不 失 一 般 性 , 虑 作 平 面 运 动 的 漂 浮 基 柔 性 空 考
z; 的 质 心 0c在 O B 。 上 与 (1 距 离 为 a , 轴 )的
o x , 为 柔性 臂 B 在 t J ( ) 2 时刻坐标 z ( ≤z ≤z) O 点 处的 横 向弹性 变形 。B。 的质 量为 优。相 应 的中心转 ;
第 3 第 5期 o卷
21 0 0年 1 O月
振 动 、 试 与 诊 断 测
J u n lo b ain, a u e n o r a fVi r t o Me s r me t& Dig o i a n ss
V o .3 o. 1 0N 5
OC . 2 1 t 00
柔性 空 间机械 臂振 动抑 制 的模糊 终端 滑 模 控 制
柔性遥操作机器人系统的滑模变结构控制
外 学 者 的广 泛 关 注 。在 过 去 二Байду номын сангаас十 多 年 中 , 内 、 学 者 对 柔 国 外
l 引 言
遥操作机器人是指在人的操纵 下能在人 难以接近 ( 距离 遥远 、 对人有害或操作有 难度 ) 的环境 中完 成 比较复杂 的精 细操作的一种远距离操 作 系统 。遥 操作 机器人 系统 主要
WA G C u j g Z N ig— u N h n— i , E G Q n jn n
( c o l f l t nca d I om t nE g er g Ja gu U i r t o c n e a dT c n l y S h o o E e r i n fr ai n i e n , i s nv s y f i c n e h o g , co n o n i n e i S e o
中圈 分 类 号 : P4 T 22 文 献标 识码 : A
Sl ng —M o e Co t ol rf r a Flxbl i di — d n r l o e i e e Tee— m a i ulto b tSy tm l — n p a i n Ro o se
滑模控制技术在机械臂路径跟踪的应用

滑模控制技术在机械臂路径跟踪的应用一、滑模控制技术概述滑模控制技术是一种非线性控制方法,起源于20世纪50年代,最初应用于航空领域。
它的核心思想是通过设计一个滑动面,使得系统状态能够从初始状态到达这个滑动面,并在其上滑动至目标状态。
滑模控制具有快速响应、抗干扰能力强、易于实现等优点,因此在工业自动化、机器人控制等领域得到了广泛的应用。
1.1 滑模控制技术原理滑模控制技术的基本原理是选择一个合适的滑动面,使得系统状态在该面上的动态行为满足期望的性能指标。
当系统状态达到滑动面时,控制作用会使得状态沿着滑动面滑动,直至达到期望的平衡状态。
滑模控制的关键在于滑动面的设计,它决定了系统的动态性能和稳定性。
1.2 滑模控制技术特点滑模控制技术具有以下特点:- 强鲁棒性:对系统参数变化和外部干扰具有较强的不敏感性。
- 快速性:能够快速响应系统状态的变化,实现快速跟踪。
- 易于实现:控制算法结构简单,易于在数字控制系统中实现。
- 可调整性:通过调整控制参数,可以灵活地满足不同的性能要求。
二、机械臂路径跟踪问题机械臂路径跟踪是机器人技术中的一个重要问题,它要求机械臂能够按照预定的路径精确地移动,以完成各种任务。
路径跟踪的精度直接影响到机械臂的操作性能和任务完成的质量。
2.1 机械臂路径跟踪的重要性机械臂路径跟踪的精确性对于提高生产效率、保证产品质量具有重要意义。
在自动化生产线、医疗手术、空间探索等领域,精确的路径跟踪是实现高效、安全操作的基础。
2.2 机械臂路径跟踪的挑战机械臂路径跟踪面临诸多挑战,包括:- 动力学不确定性:机械臂的动力学特性可能因负载变化、磨损等因素而发生变化。
- 外部干扰:环境因素如温度、湿度、振动等可能对机械臂的运动产生影响。
- 非线性特性:机械臂的动力学模型通常具有非线性特性,增加了控制的复杂性。
三、滑模控制在机械臂路径跟踪中的应用将滑模控制技术应用于机械臂路径跟踪,可以有效提高跟踪精度和系统稳定性。
基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制

第40卷第7期2023年7月控制理论与应用Control Theory&ApplicationsV ol.40No.7Jul.2023基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制王军晓†,闫小东,徐建明(浙江工业大学信息工程学院,浙江杭州310023)摘要:本文针对系统中存在的关节摩擦、动力学参数不确定性和外部负载干扰等因素引起的柔性机械臂系统控制性能下降的问题,提出了一种基于扰动和摩擦补偿的非奇异快速终端滑模控制方法(NFTSMC-DE-FC).首先,设计扰动估计器(DE)对系统未知动态参数和负载干扰进行估计.然后,针对扰动估计器不能精确估计的关节摩擦力矩进行辨识.最后,利用滑模控制技术设计非奇异快速终端滑模控制器,并将扰动估计值和摩擦力辨识值以前馈的方式进行补偿,实现对柔性机械臂系统给定参考轨迹跟踪的准确性以及对外界扰动的鲁棒性.值得注意的是,与传统只使用扰动估计器的方法相比,本文考虑到了摩擦力等非线性因素的影响,并利用辨识技术对摩擦力进行辨识,提高了控制精度.利用Lyapunov稳定性定理从理论上证明了所设计的控制器可以保证闭环系统的稳定性.实验结果表明,相较于非奇异快速终端滑模控制方法(NFTSMC)和基于扰动估计器的非奇异快速终端滑模控制方法(NFTSMC-DE),所提方法提高了柔性机械臂系统的轨迹跟踪性能.关键词:柔性机械臂;滑模控制;扰动估计器;摩擦辨识;扰动抑制引用格式:王军晓,闫小东,徐建明.基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制.控制理论与应用,2023,40(7):1199–1207DOI:10.7641/CTA.2022.20351Nonsingular fast terminal-sliding-mode control forflexible manipulator system based on disturbance and friction compensationWANG Jun-xiao†,YAN Xiao-dong,XU Jian-ming(College of Information Engineering,Zhejiang University of Technology,Hangzhou Zhejiang310023,China) Abstract:To deal with the problem of degradation in control performance of theflexible manipulator system caused by joint friction,dynamic parameter uncertainty and external load disturbance,this paper proposes a nonsingular fast terminal-sliding-mode control method based on the disturbance and friction compensation(NFTSMC-DE-FC).Firstly,a disturbance estimator(DE)is designed to estimate the unknown dynamic parameters and load disturbance of the system.Then the joint friction torques which can not be accurately estimated by disturbance estimator are identified.Finally,a nonsingular fast terminal sliding mode controller is designed by using the sliding mode control technology,and the disturbance estimates and friction identification values are compensated in a feedforward way to achieve the accuracy of tracking the given reference trajectory of theflexible manipulator system and the robustness to external disturbances.It is worth noting that compared with the traditional method which only uses disturbance estimator,the influence of nonlinear factors such as friction force is considered in this paper,and the friction is identified by using the identification technology,which improves the control accuracy.The Lyapunov stability theorem is used to prove that the designed controller can guarantee the stability of the closed-loop system.Experimental results show that compared with NFTSMC and NFTSMC-DE,the proposed method improves the trajectory tracking performance of theflexible manipulator system.Key words:flexible manipulators;sliding mode control;disturbance estimator;friction identification;disturbance rejectionCitation:WANG Junxiao,YAN Xiaodong,XU Jianming.Nonsingular fast terminal-sliding-mode control forflexible manipulator system based on disturbance and friction compensation.Control Theory&Applications,2023,40(7):1199–1207收稿日期:2022−05−06;录用日期:2022−11−10.†通信作者.E-mail:****************.cn;Tel.:+86187****5157.本文责任编委:李世华.国家自然科学基金项目(62273306)资助.Supported by the National Natural Science Foundation of China(62273306).1200控制理论与应用第40卷1引言由于柔性机械臂具有更强的柔顺性,因此在人机交互领域得到了广泛应用[1].与传统的刚性机械臂相比,柔性机械臂具有更平滑的力传输和较大的耐冲击性能[2],然而,由于柔性关节机械臂的动力学模型是由电机侧动力学模型和连杆侧动力学模型组成,而在实际系统中存在电机侧的质量矩阵、阻尼矩阵等动力学参数难以得到,连杆侧的惯性矩阵、重力矩阵等动力学参数不准确的问题,难以建立精确的柔性机械臂动力学模型;此外,机械臂还会受到关节摩擦以及外界负载变化等因素的影响,这些都会影响机械臂的控制精度.其中摩擦力矩是一种复杂的,非线性的,特别是关节处在低速和速度反向阶段,在此阶段关节摩擦力对位置跟踪性能有很大的影响[3].为此,国内外学者针对柔性机械臂的高精度轨迹跟踪问题做了许多探索和研究,提出了许多有效的控制方法,如自抗扰控制[4]、基于扰动观测器的控制[5]、滑模控制(sliding mode control,SMC)[6–7]、自适应控制[8–9]、智能控制[10–11]等.这些控制策略在一定程度上改善了柔性机械臂的控制性能.其中,对扰动具有较强鲁棒性的滑模控制SMC受到了更多的关注[12], SMC虽然能够对系统存在的扰动进行有效的抑制,但SMC由于不连续的切换项的存在会导致抖振问题,严重时可能会对执行器造成破坏[13].基于扰动观测器的控制方法(disturbance observer based control,DOB-C)能够有效地补偿外部干扰和动力学模型参数不确定性对控制系统的影响[14–15],而基于扰动观测器的滑模控制方案不仅能够有效的削弱SMC中的抖振现象,而且使系统的抗干扰性能得到了提升[16].目前扩张状态观测器(extended state observer,ESO)[17]、广义比例积分观测器(generalized proportional integral observer, GPIO)[18]、滑模观测器[19]等多种扰动观测器被应用于柔性机械臂的控制策略中,文献[20–22]将系统中的动力学参数不确定性和摩擦非线性因素等未知状态作为总扰动,将总的扰动扩展成一个新的状态变量并利用ESO进行估计,然而扰动观测器却不能精确的估计摩擦[23].本文针对系统中动力学参数不确定性、外部负载扰动以及关节摩擦等因素引起的柔性机械臂系统控制性能下降的问题,提出了一种基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制方法.该方法首先将系统中动力学参数不确定性和外部负载干扰作为系统总扰动,然后采用扰动估计器(disturb-ance estimator,DE)对总扰动进行估计,针对扰动估计器不能精确估计的关节摩擦力矩基于辨识技术进行摩擦补偿(friction compensation,FC),最后利用滑模控制技术设计非奇异快速终端滑模控制器.实验结果表明,相较于非奇异快速终端滑模控制(nonsingular fast terminal sliding mode control,NFTSMC)[24]和基于扰动估计器的非奇异快速终端滑模控制(NFTSMC-DE)方法,所提出的基于扰动和摩擦补偿的非奇异快速终端滑模控制(NFTSMC-DE-FC)方法提高了柔性机械臂系统的轨迹跟踪性能.2柔性机械臂系统的数学模型本文所采用的柔性机械臂系统结构如图1所示,该系统主要由电机、减速器、串联弹性制动器(series elastic actuator,SEA)、负载连杆组成.电机与负载是通过SEA进行连接,使关节具有柔顺性.根据文献[25],将关节柔性等效为线性扭矩弹簧,并且考虑到外界负载干扰以及电机端和连杆端的摩擦等因素,建立柔性机械臂系统的数学模型为M(q)¨q+C(q,˙q)˙q+G(q)+f2+ω(t)=τ,(1) J¨θ+D˙θ+f1+τ=T m,(2) K p(θ−q)=τ,(3)其中:θ为电机侧转角,q为为连杆侧转角,˙θ为电机侧角速度,˙q为连杆侧转角速度,¨θ为电机侧角加速度,¨q为连杆侧转角加速度,M(q)为机械臂惯性矩阵, C(q,˙q)为离心力和哥式力项,G(q)为机械臂重力矩阵,K p为柔性关节的弹性系数,T m为控制器输出力矩,τ为柔性关节传递扭矩,J为电机转子转动惯量, D为电机阻尼系数,ω(t)为机械臂受到的未知外界扰动,f1,f2分别为电机端和负载端摩擦力矩.图1柔性机械臂系统结构Fig.1Structure of theflexible robots system根据文献[26],单关节柔性机械臂数学模型为I¨q+M g l sin q+f2+ω(t)=τ,(4)J m¨θ+D m˙θ+f1+τ=T m,(5)K p(θ−q)=τ,(6)其中:M为连杆质量,g为重力加速度,l为连杆长度.由式(4)–(6)可知,柔性机械臂实际上是由电机驱动电机转轴旋转,通过使SEA发生弹性形变产生扭矩,进而把电机轴扭矩传递给末端负载,结合式(4)–(5)可得I¨q+M g l sin q+f1+f2=T m−ω(t)−F(θ,˙θ,¨θ),(7)其中F(˙θ,¨θ)=J m¨θ+D m˙θ为电机动力学参数,进一步考虑关节柔性的影响,由式(6)–(7)得到柔性机械臂完整动力学模型为I¨q+M g l sin q+f=第7期王军晓等:基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制1201 T m−ω(t)−J m K−1p¨τ−D m K−1p˙τ−J m¨q−D m˙q.(8)其中f=f1+f2为电机端和连杆端摩擦力矩总和,并且式中的机械臂动力学参数可以写成I=I0+∆I,M=M0+∆M,l=l0+∆l,其中:∆I,∆M,∆l为系统动力学参数不确定量,并假定柔性机械臂系统动力学模型中电机侧的动力学参数J m和D m完全未知.令x1=q,x2=˙q,则柔性机械臂系统的状态空间方程表示为˙x1=x2,˙x2=I−1T m−I−10(M0g l0sin x1+f)+F,y=x1.(9)其中F=I−1(−ω(t)−∆I¨x1−∆M g∆l sin x1−J m K−1p ¨τ−D m K−1p˙τ−J m¨x1−D m˙x1)为总扰动,总扰动主要由3部分组成:I−1ω(t)为机械臂系统工作过程中由于负载变化等外界环境的干扰对系统动力学造成的影响;I−1(−∆I¨x1−∆M g∆l sin x1)为机械臂系统自身动力学参数变化引起的不确定性;I−1(−J m K−1p ¨τ−D m K−1p˙τ−J m¨x1−D m˙x1)为机械臂系统引入SEA后造成的动力学模型不确定项;y为测量输出.假设1假设系统中存在的总和扰动的一阶导数˙F是有界的,且满足|˙F| l g.3控制器设计系统中动力学参数不确定性、外界负载干扰以及关节摩擦会引起柔性机械臂系统在运行过程中偏离参考位置甚至还会导致系统不稳定,因此本节提出了一种基于扰动估计和摩擦补偿的非奇异快速终端滑模控制方法(图2).该方法首先对系统中存在的动力学模型参数不确定性和外部负载干扰设计扰动估计器进行估计,然后针对估计器不能精确估计的摩擦项通过实验数据进行辨识.最后设计非奇异快速终端滑模控制器,并将总扰动估计值和摩擦辨识值以前馈的方式进行补偿.图2基于扰动和摩擦补偿的非奇异快速终端滑模控制框图Fig.2Block diagram of nonsingular fast terminal-sliding-mode-control based on disturbance and friction com-pensation 3.1关节摩擦力矩辨识LuGre摩擦模型[27]是一种广泛应用于机械和伺服系统的非线性动态摩擦模型,本节将基于实验平台采集摩擦力数据,并利用辨识技术得到模型参数.LuGre 摩擦模型假设相对运动的两个刚性体在微观上通过弹性鬃毛相接触.模型的建立是基于鬃毛的平均形变量,能够准确的描述机械手系统中摩擦的动、静态特性,鬃毛的平均变形用z表示为d zd t=v−σ0|v|g(v)z,(10)其中:v为接触面相对速度,g(v)为速度相关的函数,表示不同的摩擦效应.LuGre摩擦力矩数学模型如下:d zd t=v−σ0|v|g(v)z,(11) g(v)=F c+(F s−F c)e−|v/v s|α,(12)F=σ0z+σ1˙z+σ2v,(13)其中:σ0,σ1和为动态摩擦参数;σ0为鬃毛的刚性系数;σ1为鬃毛微观阻尼系数;σ2为黏性阻尼系数;F c为库伦摩擦力;F s为静摩擦力;v s为Stribeck速度;指数α为一个经验值,在本文中α取值为2[28].本节中LuGre摩擦模型参数是通过离线辨识获得,其中有4个静态参数和2个动态参数需要辨识,分别为v s,F c,F s,σ2和σ0,σ1.首先对静态参数进行辨识,当关节匀速运动时,摩擦力矩可描述为F v=g(v)sgn v+σ2v.(14)经过多次实验得到摩擦力数据,并通过最小二乘法得到摩擦模型的静态参数.根据文献[29]中的两步法对动态参数进行辨识,应用速度闭环控制,使系统进行低频低幅值正弦运动,并选取此过程中的速度和驱动力信息作为动态参数辨识的输入数据.经过多次实验得到LuGre摩擦模型参数如表1所示.表1摩擦力矩模型参数Table1Parameters of the friction torque model参数符号辨识值库伦摩擦力F+c/Nm0.6490F−c/Nm0.1498静摩擦力F+s/Nm0.6838F−s/Nm0.1794黏性阻尼系数σ+2/(Nms·rad)−10.1712σ−2/(Nms·rad)−10.1391 Stribeck速度v+s/(rad·s)−10.02567v−s/(rad·s)−10.01691鬃毛刚性系数σ0/(Nm·rad)−145.014鬃毛微观阻尼系数σ1/(Nms·rad)−11.281注1由表1可知:在速度正负两个方向上辨识出的摩擦力过零点位置是不一致的,也就是说两个方向上的摩擦力1202控制理论与应用第40卷也是不尽相同的.在做摩擦补偿的时候需要考虑运动方向带来的问题,而式(12)在速度为零时会有两个不同的取值,取g (0)=(F +s+F −s )/2.假设2假设系统中存在的摩擦力的辨识误差∆f =f −¯f 是有界的,并满足|∆f | ˜l g .3.2扰动估计定义1[30]考虑系统˙x =f (x,t )的平衡状态x e =0,如果对任何ε>0,存在一个δ>0(与ε和初始时间t 0有关),使得从球域S (δ)内任一初始状态出发的状态轨迹始终在球域S (δ)内,则平衡状态x e =0称为在李雅普诺夫意义下是稳定的.引理1[31]当且仅当对于任意给定的正定对称矩阵Q ,存在一个正定对称矩阵P 满足A T P +P A =−Q ,那么A 是Hurwitz 矩阵,即A 的所有特征值都满足Re λi <0.此外,如果A 是Hurwitz 矩阵,那么正定对称矩阵P 就是满足方程A T P +P A =−Q 的唯一解.根据文献[32]中龙伯格观测器的定义,则系统(9)对应的龙伯格观测器模型为 e 1=z 1−x 1,˙z 1=z 2−l 1e 1,˙z 2=F +I −10T m −I −10(M 0g l 0sin z 1+¯f)−l 2e 1,(15)其中:z 1,z 2分别为x 1,x 2的估计值,¯f为辨识得到的摩擦力f 的值.针对不同形式的扰动可以设计广义的扰动估计器进行估计.对于未知扰动F ,首先对扰动的具体形式进行分析,由上文可知,考虑到实际情况的扰动形式以及后续控制器的设计,假设系统扰动F 满足假设1,即扰动的导数满足有界条件,为此针对扰动F 采用误差的积分形式设计扰动估计器ˆF =−l 3e 1d t,(16)则对应的扰动估计器系统为˙z 1=z 2−l 1e 1,˙z 2=ˆF +I −10T m −I −10(M 0g l 0sin z 1+¯f )−l 2e 1,ˆF =−l 3 e 1d t,(17)其中:ˆF为F 的估计值,选取l 1=β1ω,l 2=β2ω2,l 3=β3ω3,并假定ω 1.定义估计器误差e 1=z 1−x 1,e 2=z 2−x 2,e 3=ˆF−F ,得到估计器误差系统如下: ˙e 1=e 2−β1ωe 1,˙e 2=e 3−β2ω2e 1,˙e 3=−β3ω3e 1−˙F.(18)定义误差变量η=[e 1e 2ωe 3ω2],则系统估计误差用状态空间模型可以表述为˙η=ωAη−B ˙Fω2,(19)其中:A = −β110−β201−β300 ,B = 001.对设计的扰动估计器进行稳定性分析如下.定理1假设估计器误差系统(19)满足假设1,若矩阵A 是Hurwitz 矩阵,则估计器误差系统稳定,并且估计误差收敛到界2l g ∥Γ∥ω内.证选取李雅普诺夫函数V η=ηT P η,求导得˙V η=˙ηT P η+ηT P ˙η=(ωAη−B ˙F ω2)T P η+ηTP (ωAη−B ˙F ω2)=ωηT (A TP +P A )η−2˙F ω2ηT P B.(20)根据引理1,若A 为Hurwitz 矩阵,则存在唯一的正定对称矩阵P ,使得A T P +P A =−I 成立,并将Cauchy-Schwarz 不等式[33]应用到式(20)得˙V η=ηT (A T P +P A )η−2˙F ω2ηT P B =−ω∥η∥2−2˙F ω2ηT P B−ω∥η∥2+2l g ω2∥η∥∥Γ∥,(21)其中:∥η∥为扰动估计误差的范数,l g 为扰动导数˙F 的上界,Γ=P B .当∥η∥>2l g ∥Γ∥ω3时,˙V η<0.根据定义1,所设计的扰动估计器是稳定的.因此从理论上可以得出结论,估计器误差变量∥η∥收敛到界2l g ∥Γ∥ω3内,而∥η∥=√e 21+e 22/ω2+e 23/ω4,得到系统估计误差|e i | ˘l gi =2l g ∥Γ∥ω4−i,i =1,2,3.即扰动F 的估计误差|e 3| 2l g ∥Γ∥ω.由上述结论可知,在保证矩阵A 是Hurwitz 矩阵前提下可以通过增大参数ω使估计误差趋向于无穷小,但由扰动估计器式(16)可知,过大的参数会引起扰动估计值有比较大的波动,导致控制器的控制性能下降等问题,因此扰动估计器参数的选择应保证扰动估计满足控制要求的前提下选择尽量小的值.而针对摩擦力f ,机械臂关节在转向时f 会有正负切换,而此时的摩擦力一阶导数˙f =∞.如果把摩擦力当作扰动F 的一部分,则在这一阶段˙F=∞,由式(19)可知,扰动估计误差并不能收敛到零或者收敛到较小的界内.另外,若要保证扰动估计误差收敛到第7期王军晓等:基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制1203零,需要选择比较大的估计器参数ω,然而过大的ω在实际中会导致扰动估计值有比较大的波动等问题.因此,利用扰动估计器对摩擦力进行估计时并不能得到满意的估计精度.证毕.3.3非奇异快速终端滑模控制本节考虑系统中存在动力学参数不确定性,外界负载扰动以及关节摩擦的情况下,讨论结合扰动估计和摩擦补偿的非奇异快速终端滑模控制器的设计.由于控制目标是使机械臂关节跟踪期望轨迹.定义误差函数如下:σ=x d−x1,(22)其中:x1为机械臂关节实际状态,x d和为关节状态参考值,设计非奇异快速终端滑模面为s=σ+1ασg/h+1β˙σp/q.(23)其中:α∈R+,β∈R+,p,q,g,h∈N为奇数,且满足1<p/q<2,p/q<g/h.求得等效控制律为T eq=I0[¨x d+βqp˙σ2−p/q(1+gαhσg/h−1)]+M0g l0sin x1+¯f−I0ˆF.(24)设计滑模趋近律˙s=−k sgn s,k>I−10˜lg+˘l g3,(25)其中:˜l g为摩擦力矩辨识误差上界,˘l g3为总扰动估计误差上界.结合式(23)–(25),得到滑模控制律如下:T m=I0[¨x d+βqp˙σ2−p/q(1+gαhσg/h−1)−ˆF+k sgn s]+M0g l0sin x1+¯f.(26) 3.4闭环系统稳定性分析定义2[31]对于系统˙x(t)=f(x(t),t),如果存在与t0无关的正常数a2,t0 0,且对于任意大的a1,存在T=T(a1,a2) 0与t0无关,满足∥x(t0)∥ a1⇒∥x(t)∥ a2,∀t t0+T,则系统的解x(t)是全局一致最终有界的.定理2假设系统(9)满足假设1和假设2,在控制律(26)作用下,如果控制器切换增益k满足条件k>I−1 0˜lg+˘l g3,则系统的位置跟踪误差能够收敛零.证由于控制器中增加了估计器部分,所以需要考虑估计器变量,定义Vη=ηT Pη,其中P为对称正定矩阵.选取李雅普诺夫函数V=12s2+Vη,(27)对其求导˙V=s˙s+˙ηT Pη+ηT P˙η=s[˙σ+gαhσg/h−1˙σ+pβq˙σp/q−1(¨x d−¨x1)]+˙ηT Pη+ηT P˙η=s[ρ(˙σ)(−k sgn s−∆F+I−1∆f)]+(ωAη−B˙Fω2)T Pη+ηT P(ωAη−B˙Fω2)=s[ρ(˙σ)(−k sgn s−∆F+I−1∆f)]+ωηT(A T P+P A)η−2˙Fω2ηT P B,(28)其中:∆f=f−¯f为摩擦力辨识误差,∆F=F−ˆF为系统未知扰动估计误差,ρ(˙σ)=pβq˙σp/q−1,并且满足ρ(˙σ) 0.根据引理1,若A为Hurwitz矩阵,则存在唯一的正定对称矩阵P,使得A T P+P A=−I成立,并将Young不等式[34]应用到式(28)得˙V=s[ρ(˙σ)(−k sgn s+I−1∆f−∆F)]+ωηT(A T P+P A)η−2˙Fω2ηT P B=s[ρ(˙σ)(−k sgn s+I−1∆f−e3)]−ω∥η∥2−2˙Fω2ηT P B|s|[ρ(˙σ)(−k+(I−10˜l g+˘l g3))]−ω∥η∥2+∥η∥2+l2gω4∥Γ∥2=|s|[ρ(˙σ)(−k+(I−10˜l g+˘l g3))]+(1−ω)∥η∥2+l2gω4∥Γ∥2=−|s|ξ+(1−ω)∥η∥2+l2gω4∥Γ∥2,(29)其中:ξ=ρ(˙σ)(k−(I−1˜lg+˘l g3)),∥η∥2表示误差向量η的范数的平方.因此上式理论结果会出现以下两种情况:1)当|s|>l2g∥Γ∥2ω4ξ时,l2gω4∥Γ∥2−|s|ξ<0,˙V<0,系统状态将会收敛;2)当|s|l2g∥Γ∥2ω4ξ时,l2gω4∥Γ∥2−|s|ξ>0,若满足条件∥η∥2l2g∥Γ∥2−ω4|s|ξω4(ω−1),则˙V<0,系统状态将会收敛.综合上述两种情况,估计器误差变量和跟踪误差变量均是有界的.根据定义2,系统是全局一致最终有界,接着证明滑模面函数的收敛性能.选取李雅普诺夫函数V1=12s2,(30)1204控制理论与应用第40卷对李雅普诺夫函数求导˙V 1=s ˙s =s [˙σ+g αh σg /h −1˙σ+p βq˙σp /q −1(¨x d −¨x 1)]=s [p βq˙σp /q −1(−k sgn s −∆F +I −10∆f )] −|s |ρ(˙σ)[k −(I −10˜l g +˘l g 3)],(31)其中:ρ(˙σ)=p βq˙σp /q −1,对于控制器只需选择合适的k ,并满足条件k >I −10˜l g +˘l g 3,此时有˙V1 0.下面对ρ(˙σ)=0的情况进行分析.1)当ρ(˙σ)=0(˙σ=0)时,¨σ=−k sgn s +I −10∆f −∆F ,此时¨σs <0,仍然满足趋近条件,系统状态将会趋近滑模面s =0[35];2)当ρ(˙σ)>0时,k >I −10˜l g +˘l g 3,此时˙V1<0,系统状态趋近滑模面s =0.综合上述情况,在控制律(26)作用下,系统状态在任意初始条件下到达滑模面s =0,并沿着滑模面使位置跟踪误差收敛到零.证毕.4实验验证本节基于Baxter 机器人对提出的控制策略进行验证,如图3所示,Baxter 是一款典型的具有柔性关节的双臂机器人,机器人手臂每个关节中都内置有SEA,增强了机械臂的柔顺性,在人机协作或者外部碰撞下能起到保护人和机械臂本体的作用.用户可以基于ROS(robot operating system)操作系统与机器人内部计算机互联来接受和发送信号,通过该机器人关节处内置的传感器可以获得许多关键参数,例如关节位置,速度和扭矩等参数.其中柔性机械臂关节w 1各参数如表2所示,本实验中的控制算法是基于Python 语言实现的,机械臂的控制周期为10ms.图3柔性机械臂系统实验平台Fig.3Experimental platform of the flexible robots system为了更好地验证本文所提出的控制策略的跟踪性能,将其与传统的非奇异快速终端滑模控制以及基于扰动估计器的非奇异快速终端滑模控制方法进行比较.最后,为了定量分析系统的位置跟踪精度和对未知扰动的抑制性能,将实验数据采用时间乘绝对误差积分准则(integral of time-multiplied absolute-value oferror,ITAE)和均方根误差(root mean square error,R-MSE)[36]两项性能指标来定量分析.ITAE = t 0t |y −x d |d τ,RMSE =√ t 01t(y −x d )2d τ,(32)其中:x d 为给定参考位置,y 为系统输出.表2柔性机械臂系统参数Table 2Parameters of the flexible manipulators system参数符号参考值连杆惯量I /kg ·m 20.17连杆质量m /kg 2.15连杆长度l /m0.23弹性刚度系数K p /(Nm ·rad)−1250电机转子惯量J m /kg ·m 2−电机阻尼系数D m /(Nms ·rad)−1−重力加速度g/m ·s 29.80根据上述方法和参数设计控制器并设计实验进行验证,为了进行比较,对比实验中尽可能选择相同的控制参数.针对切换增益k ,不同方案的k 根据不同标准进行选择,由上文理论分析结果可知,针对NFTS-MC 方案,为了达到满意的跟踪效果和扰动抑制性能需保证切换增益k >I −10f +F ,而当外界有负载干扰时,需要通过较大的切换增益k 对外界干扰进行抑制;利用NFTSMC-DE 方案进行实验时,需保证切换增益满足k >I −10f +˘l g 3条件;而利用NFTSMC-DE-FC方案进行实验时,只需保证切换增益k >I −10˜l g +˘l g 3,相对于前两种方案,NFTSMC-DE-FC 控制器中设计的切换增益k 明显减小.控制方案中的扰动估计器参数β1,β2,β3设计为3,3,1,控制器中其他参数的选取参见表3.表3控制器参数表(实验)Table 3Parameters of the controller (Experiment)控制器控制器参数αg h βp q k ωNFTSMC 119511976.6−NFTSMC-DE 119511970.845NFTSMC-DE-FC119511970.845通过下述实验对动态轨迹跟踪性能和扰动抑制性能进行验证:情况I 对动态轨迹的跟踪性能,设计正弦轨迹跟踪实验,参考位置为x d =0.8sin t rad.正弦跟踪实验结果如图4–5所示,其中3种控制方案的主要参数为切换增益k ,实验中k 的值分别为第7期王军晓等:基于扰动和摩擦补偿的柔性机械臂系统非奇异快速终端滑模控制12056.6,0.8,0.8.由图4可知,为了能够抑制动力学模型中的参数不确定量和关节摩擦等因素的影响,使关节状态跟踪上期望位置,其中NFTSMC 方案的非连续切换项会选择较大的增益k .而NFTSMC-DE 方案可以通过对扰动进行估计补偿减少控制器的切换增益,减弱系统的抖振现象.然而由上文分析可知,扰动估计器并不能精确估计非线性摩擦项,依然会出现“平顶”现象,如图5所示.为了比较本文所提出控制策略的优势,选择同样的切换增益k 进行实验对比,实验结果表明本文所提控制方案在位置跟踪精度上有明显的提高.另外,图4和图5的实验结果和理论分析的结果一致.㗗䔼䗍NFTSMCNFTSMC-DEY 1 / r a dU / s NFTSMC NFTSMC-DE05101520U / s0.40.20.0σ / r a d5m / N mU / s图42种控制方法作用下的正弦跟踪响应曲线(情况I 实验)Fig.4Response curves of sine wave tracking under two con-trollers (Case I Experiment)情况II 对外界扰动抑制能力,通过在连杆末端悬挂质量为0.3kg 的负载模拟受到外界扰动的影响.在外界有负载干扰情况下实验结果如图6和图7所示,其中3种控制方案的主要参数为切换增益k ,实验中k 的值分别为10.3,0.8,0.8.为了抑制末端负载和未知扰动的影响,NFTSMC 方案中切换增益k 设计为10.3.由图6可知,NFTSMC 控制量波动值达到了4.7,导致系统具有比较大的抖振.如图7所示,利用DE 对系统干扰进行估计、利用辨识技术对摩擦项进行辨识并在控制器中进行补偿之后的切换增益明显减小,控制精度得到提高.为了比较本文提出的控制策略的优势,在具有扰动的情况下选择同样的切换增益k 进行实验对比,由图6和图7可知,实验结果和理论分析的结果一致,提出的控制方案具有更好的控制性能.实验结果的性能指标见表4.NFTSMC-DE NFTSMC-DE-FC8.08.80.040.020.000.020.04 㗗䔼䗍NFTSMC-DE NFTSMC-DE-FC Y 1 / r a dU / s0.40.20.0σ / r a d1510505m / N m05101520U / s5101520U / sNFTSMC-DENFTSMC-DE-FC图52种控制方法作用下的正弦跟踪响应曲线(情况I 实验)Fig.5Response curves of sine wave tracking under two con-trollers (Case IExperiment)㘳䖘䘩NFTSMCNFTSMC-DE Y 1 / r a dU / s 0.40.20.0σ / r a d5m / N m5101520U / sU / sNFTSMC NFTSMC-DE图62种控制方法作用下的正弦跟踪响应曲线(情况II 实验)Fig.6Response curves of sine wave tracking under two con-trollers (Case II Experiment)5结论本文研究了柔性机械臂系统的位置跟踪问题.考虑系统存在的动力学模型参数不确定性,外界负载扰动和关节摩擦的情况,提出了一种基于扰动和摩擦补偿的非奇异快速终端滑模控制方法.通过扰动估计器1206控制理论与应用第40卷对系统动力学模型参数不确定性和外界负载扰动进行估计,并利用辨识技术对扰动估计器不能准确估计的摩擦项进行辨识,并结合非奇异快速终端滑模控制律得到最终的复合控制律,在基于串联弹性驱动器的Baxter 机器人仿真和实验平台上验证本文提出的控制方法,实验结果表明,所提出的控制器具有令人满意的性能,并证明了所提的控制方法更有优势.8.09.0 0.050.000.05NFTSMC-DE NFTSMC-DE-FC㗗䔼䗍NFTSMC-DE NFTSMC-DE-FC Y 1 / r a dU / s0.40.20.0σ / r a d1510505m / N m05101520U / sNFTSMC-DE NFTSMC-DE-FC5101520U / s图72种控制方法作用下的正弦跟踪响应曲线(情况II 实验)Fig.7Response curves of sine wave tracking under two con-trollers (Case II Experiment)表4位置跟踪的性能指标比较(实验)Table 4Comparison of performance indexes for posi-tion tracking (Experiment)控制器ITAE RMSE 情况1NFTSMC 438.20447.1111NFTSMC-DE 191.6509 5.6180NFTSMC-DE-FC 88.0465 5.3340情况2NFTSMC 450.6135 5.9202NFTSMC-DE 276.5128 5.4828NFTSMC-DE-FC133.37925.2439参考文献:[1]LI X,PAN Y P,CHEN G,et al.Multi-modal control scheme for reha-bilitation robotic exoskeletons.The International Journal of Robotics Research ,2017,36(5/7):759–777.[2]SUN L,YIN W,WANG M,et al.Position control for flexible jointrobot based on online gravity compensation with vibration sup-pression.IEEE Transactions on Industrial Electronics ,2017,65(6):4840–4848.[3]KERMANI M R,PATEL R V ,MOALLEM M.Friction identificationand compensation in robotic manipulators.IEEE Transactions on In-strumentation and Measurement ,2007,56(6):2346–2353.[4]LIU Fucai,LIANG Lihuan,GAO Juanjuan,et al.Trajectory track-ing control with active disturbance rejection for space manipulator in different gravity environments.Control Theory &Applications ,2014,31(3):352–360.(刘福才,梁利环,高娟娟,等.不同重力环境的空间机械臂自抗扰轨迹跟踪控制.控制理论与应用,2014,31(3):352–360.)[5]YUN J N,SU J B.Design of a disturbance observer for a two-linkmanipulator with flexible joints.IEEE Transactions on Control Sys-tems Technology ,2013,22(2):809–815.[6]SOLTANPOUR M R,MOATTARI M.V oltage based sliding modecontrol of flexible joint robot manipulators in presence of uncertain-ties.Robotics and Autonomous Systems ,2019,118:204–219.[7]WANG H M,ZHANG Q Y ,SUN Z X,et al.Continuous terminalsliding-mode control for FJR subject to matched/mismatched distur-bances.IEEE Transactions on Cybernetics ,2021,DOI:10.1109/T-CYB.2021.3066593.[8]LE-TIEN L,ALBU-SCHAFFER A.Robust adaptive tracking con-trol based on state feedback controller with integrator terms for e-lastic joint robots with uncertain parameters.IEEE Transactions on Control Systems Technology ,2017,26(6):2259–2267.[9]MA H,ZHOU Q,LI H Y ,et al.Adaptive prescribed performancecontrol of a flexible-joint robotic manipulator with dynamic uncer-tainties.IEEE Transactions on Cybernetics ,2021,DOI:10.1109/T-CYB.2021.3091531.[10]XU posite learning control of flexible-link manipulator usingNN and DOB.IEEE Transactions on Systems,Man,and Cybernetics:Systems ,2017,48(11):1979–1985.[11]CHENG X,ZHANG Y J,LIU H S,et al.Adaptive neural backstep-ping control for flexible-joint robot manipulator with bounded torque inputs.Neurocomputing ,2021,458:70–86.[12]LIU J X,GAO Y B,YIN Y F,et al.Sliding Mode Control Methodolo-gy In the Applications of Industrial Power Systems .New York,USA:Springer International Publishing,2020.[13]DING S H,LIU L,PARK J H.A novel adaptive nonsingular terminalsliding mode controller design and its application to active front steer-ing system.International Journal of Robust and Nonlinear Control ,2019,29(12):4250–4269.[14]REN C E,DU T,LI G L,et al.Disturbance observer-based consen-sus control for multiple robotic manipulators.IEEE Access ,2018,6:51348–51354.[15]LIU J X,GAO Y B,SU X J,et al.Disturbance-observer-based con-trol for air management of PEM fuel cell systems via sliding mode technique.IEEE Transactions on Control Systems Technology ,2018,27(3):1129–1138.[16]GINOYA D,SHENDGE P D,PHADKE S B.Disturbance observerbased sliding mode control of nonlinear mismatched uncertain munications in Nonlinear Science and Numerical Simula-tion ,2015,26(1/3):98–107.[17]TALOLE S E,KOLHE J P,PHADKE S B.Extended-state-observer-based control of flexible-joint system with experimental validation.IEEE Transactions on Industrial Electronics ,2009,57(4):1411–1419.[18]SUN J K,YANG J,LI S H,et al.Output-based dynamic event-triggered mechanisms for disturbance rejection control of networked nonlinear systems.IEEE Transactions on Cybernetics ,2018,50(5):1978–1988.[19]WANG H M,PENG W W,TAN X,et al.Robust output feedbacktracking control for flexible-joint robots based on CTSMC technique.IEEE Transactions on Circuits and Systems II:Express Briefs ,2020,68(6):1982–1986.。
机械臂的滑模控制算法研究
机械臂的滑模控制算法研究机械臂的滑模控制算法研究摘要:机械臂的滑模控制算法是一种特殊的控制算法,通过建立滑模面和滑模控制律来实现对机械臂系统的精确控制。
本文将介绍机械臂的滑模控制算法的基本原理和研究进展,探讨滑模控制算法在机械臂控制中的应用与挑战。
一、引言机械臂是一种多关节的机构,具有高度灵活、精确性好、速度快等特点,广泛应用于工业生产、医疗手术、空间探测等领域。
机械臂的运动控制是实现其精确操作的关键,滑模控制算法作为一种高鲁棒性的控制方法,逐渐受到研究者的关注。
二、滑模控制算法的基本原理滑模控制算法是一种基于滑模面和滑模控制律的控制方法。
首先,通过选择合适的滑模面,将系统状态引导至滑模面上,然后通过滑模控制律对滑模面上的动态进行调整,最终实现对系统状态的控制。
滑模控制算法具有简单、鲁棒性强等特点。
三、滑模控制算法在机械臂控制中的应用1. 机械臂的轨迹跟踪控制:通过建立轨迹跟踪误差的滑模面,利用滑模控制律对机械臂进行控制,实现对预期轨迹的精确跟踪。
2. 机械臂的扰动抑制控制:通过建立扰动估计器和滑模面,对机械臂系统的扰动进行抑制,提高系统的鲁棒性和抗干扰能力。
3. 机械臂的力控制:通过引入合适的滑模面和力学特性模型,对机械臂的力进行精确控制,使机械臂能够对外界力的变化做出快速响应。
4. 机械臂的姿态控制:通过引入姿态误差的滑模面和控制律,对机械臂的姿态进行控制,实现对目标姿态的精确调节。
四、滑模控制算法研究的挑战与展望1. 模型误差对控制性能的影响:机械臂系统的模型往往是复杂且不确定的,模型误差对滑模控制算法的性能有着重要影响,如何减小模型误差,提高控制精度是当前研究的难点。
2. 非线性特性分析与控制设计:机械臂系统具有非线性特性,非线性分析与控制设计是研究中的关键问题,需要进一步深入研究非线性系统的稳定性和鲁棒性。
3. 控制器的鲁棒性和自适应性:滑模控制算法对初始条件的敏感性较高,如何提高算法的鲁棒性和自适应性是未来的研究方向。
载体位置、姿态均不受控的飘浮基柔性空间机器人的Terminal滑模控制
内收敛到零。
关 键 词 :飘 浮 基 柔 性 空 间 机 器 人 ;奇 异 摄 动 法 ;Terminal滑 模 控 制 ;柔 性 关 节 ;柔 性 臂 中图分类号:TP241暋暋暋暋暋暋DOI:10.3969/j.issn.1004 132X.2015.07.014
机械臂 Terminal滑模子控制项实现了机械臂关节铰期望轨迹的跟踪,柔性关节快变子控制项使得 快变 子系统稳定在由柔性空间机械臂子控制项产生的机械臂关节轨迹上。系 统 的 数 值 仿 真 结 果 表 明,该 方
法能在抑制柔性关节的柔性振动的同时跟踪上机械臂关节期望轨迹。该控制方案的显著优点为不需要
TerminalSliding ModeControlofaFree飊floatingFlexibleSpaceRobot YuXiaoyan暋ChenLi
Fuzhou University,Fuzhou,350116 Abstract:A Terminalslidingmodecontrolwasproposedforafree飊floatingspacerobot.Todiscuss suchanunder飊actuatedflexible飊linkflexible飊jointspacerobot,afree飊floatingspacerobotwithone flexiblelinkandtwoflexiblerevolutejointswaspresented.ThedynamicalLagrangeequationwases灢 tablishedbythemomentumconservation.Andasingularlyperturbedmodelwasformulatedandused fordesigningareduced飊ordercontroller,wherethesystem wasdecoupledintotwosubsystems (a flexiblespace manipulatorsubsystem andaflexible飊jointfastsubsystem).A compositecontroller whichconsistedoftwocontrolcomponentswasproposed.A Terminalsliding modecontrollerwas proposedtocontroltheflexiblespace manipulatorsubsystem.Aflexible飊jointfastcontrollerwasde灢 signedtostabilizetheflexible飊jointfastsubsystem aroundtheequilibrium trajectorysetupbythe flexiblespacemanipulatorsubsystemundertheeffectsoftheTerminalslidingmodecontroller.Anu灢 mericalsimulationwascarriedout,whichconfirmedtheproposedcontrollerisfeasibleandeffective. Thevirtueofthiscontrolschemeisthatthebaselinearposition,thebaselinearvelocity,thebaselin灢 earaccelerationneednotbemeasured.Inaddition,itisensuredthatthetrackingerrorsofthemanipu灢 latorjointsconvergetozeroinfinitetime. Key words:free飊floatingflexiblespacerobot;singularperturbationapproach;Terminalsliding modecontrol;flexible飊joint;flexible飊link
柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制
柔性空间机器人基于关节柔性补偿控制器与虚拟力概念的模糊全局滑模控制及振动主动抑制梁捷;陈力;梁频【期刊名称】《振动与冲击》【年(卷),期】2016(035)018【摘要】空间机器人系统的柔性主要体现在空间机器人的臂杆和连接各臂杆之间的铰关节;由于空间机器人系统结构的复杂性,以往研究人员对同时具有柔性关节和柔性臂的系统关注不够;为此讨论了参数不确定情况下柔性关节、柔性臂空间机器人系统的动力学模拟、运动控制方案设计和以及臂、关节双重柔性振动的分阶主动抑制问题。
依据线动量、角动量守恒关系并基于拉格朗日方程、线性扭转弹簧及假设模态法推导了系统动力学模型;以此为基础;针对空间机器人实际应用中各关节铰具有较强柔性的情况,引入了关节柔性补偿控制器并结合奇异摄动技术将整个系统分解成独立时间尺度的电机力矩动力子系统和柔性臂子系统;针对电机力矩动力子系统,设计了力矩微分反馈控制器来抑制关节柔性引起的系统弹性振动;针对柔性臂子系统,提出了一种基于虚拟力概念的自适应模糊全局滑模控制方案,由于运用了虚拟力的概念,从而通过仅设计一个控制输入就可达到既跟踪期望轨迹又抑制柔性臂柔性振动的控制目标。
计算机数值仿真对比实验证实了该方法的可靠性和有效性。
【总页数】9页(P62-70)【作者】梁捷;陈力;梁频【作者单位】福州大学机械工程及自动化学院,福州 350108; 中国空气动力研究与发展中心,四川绵阳 621000; 电子科技大学航空航天学院,成都 611731;福州大学机械工程及自动化学院,福州 350108;中国空气动力研究与发展中心,四川绵阳 621000【正文语种】中文【中图分类】TP241【相关文献】1.关节柔性的漂浮基空间机器人基于奇异摄动法的轨迹跟踪非奇异模糊Terminal 滑模控制及柔性振动抑制 [J], 梁捷;陈力2.柔性关节空间机器人基于柔性补偿的模糊鲁棒滑模控制及柔性振动主动抑制 [J], 谢立敏;陈力3.带有柔性补偿的柔性关节空间机器人的增广自适应控制及关节振动抑制 [J], 陈志勇;陈力4.漂浮基柔性关节-柔性臂空间机器人运动非线性滑模控制及双重弹性振动主动抑制 [J], 谢立敏;陈力5.漂浮基柔性关节、柔性臂空间机器人动力学建模、饱和鲁棒模糊滑模控制及双重柔性振动主动抑制 [J], 谢立敏;陈力因版权原因,仅展示原文概要,查看原文内容请购买。
一种前馈补偿和模糊滑模相结合的柔性机械臂控制
(. 尔 滨 T 业 大 学 机 器 人 技 术 与 系 统 国家 重 点 实 验 室 ,10 0 ,哈 尔滨 ; 1哈 501
2 德 国 宇 航 中心 机 器 人 与 机 电 一 体 化 研 究 所 ,82 0 德 国慕 尼 黑 ) . 23 ,
r b t s r c u e i e f e e mi itcd s u b n ea d t e l e rp r ft ef ito a e e i i a e o o t u t r s l。d t r n s i it r a c n h i a a to h rc i n c n b l n t t n m
m i s i a ta d un e t i t a t n h rc i n i t i a r nd non i e rp r ,t n a ne nitc p r n c r a n y p r ,a d t e f ito n o l ne rpa ta ln a a t he w
第4 5卷
第 3期
西
Vo . 5 No 14 .3
M a . 2 11 r 0
21 0 1年 3月
J OURNAL OF XIAN I J AOTONG UNI VERS TY I
一
种 前 馈 补 偿 和 模 糊 滑 模 相 结 合 的 柔 性 机 械 臂 控 制
外界 的不 确 定性扰 动 、 摩擦 力的非 线性 部分 、 参数 变化 以及 建模误 差等. HI 四 自由度 柔性机 械 在 T
臂上进 行 了控 制 器的相 关 实验 , 实验 结 果表 明 , 该控 制 器具 有 良好 的位 置跟 踪性 能和较 强的抗 干扰
基于模糊滑模法的空间机械臂系统控制研究
式 ( ) 阵 D( ,(0 0) 示为适 当选 择的惯性 参数 的 1矩 0) c , 表
I 一 l ) f I , ,
求导式( ) 6 并结合 ( )可得 : 7,
V=一 一r 0 s ) s
() 7
2 模 糊滑模 控 制器 的设计
为 了保 持系统动力学方程关于惯性参数 的线性关系 ,我们 适 当增广 系统输 出的 q (0l )∈R 为 q (0 )定 义期望 t = 2 = , 输 出 q=(0 q 与增广 实际输 出 q (0qT 之间的误差 向 d ) 0 :模糊 滑模法 的空间机械臂 系统控制研 究
关听 晓
( 湄洲湾职业技术 学院, 福建 莆田 315 ) 524
摘 要: 本文讨论 了本体姿态受控、 位置不控漂浮基 空间机械臂系统、 本体与末端爪手协调控制的混合 控制 问题。 借助于增 广变量法有效地 解决 系统动力学方程关于惯性参数呈非线性问题。以此为基础, 设计 了漂浮基空间机械臂 系统的模 糊滑模 混合控制方案。系统数值仿真 , 证实上述控制方案的可靠性。 关键词 : 空间机械臂系统; 系统动力学; 增广变量法; 糊滑模 模
式( ) 口 = 一 百 i 4 中: S =e —
△ D- - =D D. X = — /h h h
选取控制输入 使 得滑模面满足到达条件 ,
妄 砒卜
: 一
。
选择正定函数作 为 Lau o yp nv函数 V ,
1 s Ds T
求导式 ( )结合式( )( )可得 : 5, 1 、4 ,
其中 A f=△ △ 圣 茸 + ,
考虑到 s AfK) j - , ( 只要满足 >△玑 即有 v o 为此设定 s I <。 为输入 ,j k 为输 出 , 对输入变量 s和输 出变量 k( 即控制量 ) 进行 模糊化处理 。 选择 La uo yp nv函数 :
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
振动、 测试与诊断
Jour nal of Vibration, M easurem ent & Diag no sis
V o l. 30 No . 5 O ct . 2010
柔性空间机械臂振动抑制的模糊终端滑模控制
陈志勇, 陈 力
( 福州大学机械工程及自动化学院 福州 , 350108) 摘要 针对载体位置不受控、 姿态受控的情况 , 提出了 柔性空间机械臂振动抑制的模糊终端滑模控制方案。利用假 设模态法、 系统动量守恒关系及拉格朗日方法 , 导出了 柔性空间机械臂的系统动力学方程。为解决柔性空间机械臂 轨迹跟踪控制及振动抑制问题 , 运用奇异摄动法将系统分解为慢变、 快变两个子系统并分别设计了控制器。慢变子 系统采用具有较强鲁棒性的模糊终端滑模控 制方案 , 快变子 系统则采用基于降阶 状态观测器的线性 二次型最优控 制器 ( linear quadrat ic r eg ulato r , 简称 L QR ) 。数值模拟结果表明 , 本文的控制方案不仅保证了柔性空间机械臂载体 姿态及机 械臂各关节铰跟踪 误差在有限时间内 的收敛性 , 而且还 大大地降低 了滑模控 制所固有的 抖振 , 并对柔性 臂的振动具有良好的抑制效果。 关键词 奇异摄动法 模糊终端滑模控制 振动抑制 柔性空间机械臂 中图分类号 T P 241 O 313. 7 T H113. 1
¨ p p /q- 1 - 1 & diag( e ) !d - D rr ( - Cr + q q - 1 2- p / q ∀s) + & e = p T
( 13)
敛到零。 证明 : 选择正定函数为准 L yapunov 函数 V = 1 T s s 2 ( 20)
综合状态变量 z1 及式 ( 13) , 可得到以状态方程 ( 14)
; z = ( z1 z 2) T ∈ R4 ; Bf =
计算V 对时间t 的全导数 , 并利用式 ( 11) 和式 ( 16) ~ 式( 19) , 得 V = sT s= sT e + s s
[ 6-8] [ 1]
图 1 漂浮基柔性空间机械臂系统
设系统由漂浮的载体 B 0 、 刚性机械臂 B 1 及柔性 机械臂B 2 组成。 柔性机械臂B 2 可视为安装在与刚性 机械臂B 1 联结转动铰上的悬臂梁。 假设只考虑细长 柔性臂的横向振动, 忽略其轴向和剪切的变形 , 且横 向振 动 为 小 变 形, 则 柔 性 机 械 臂 可 视 为 EulerBerno ulli 梁。建立各分体 B i ( i= 0, 1, 2) 的主轴连体 坐标系( Oi -x i y i ) , 其中 , O0 与B 0 的质心O C0 重合 , Oi ( i = 1, 2) 为联结 B i - 1 与 B i 的转动铰中心, x 1 为刚性臂 B 1 的对称轴 , x 2 过 O2 且与柔性臂B 2 的对称轴相切 , e i ( i = 0, 1, 2) 为沿 x i 轴方向的基矢量。设 O1 在 O0x 0 轴上与 O 0 的距离为 l 0, B i ( i = 1, 2) 的长度为 li ; B 1 的 质心 OC 1在 O 1x 1 轴上与 O1 的距离为 a 1, ( x 2 , t) 为柔 性臂 B 2 在 t 时刻坐标 x 2 ( 0≤x 2≤l 2 ) 点处的横向弹性 变形。 B 0 的质量为 m 0 ; 相应的中心转动惯量为 J 0; B 1
T ¨ p & diag( e p / q - 1 ) e = q
;∀ f 为快变子系统的控制输入。 需要指出的是, 柔性空间机械臂系统的总控制
¨ ¨ p p /q- 1 q - 1 2- p / q d - ! + & diag( e ) ! q p & e
=
输入 ∀= ∀ s+ ∀ f ; 由式 ( 11) 所确立的慢变子系统具有 类似刚性空间机械臂系统的动力学方程, 其代表了 柔性空间机械臂系统的刚性运动部分; 而式 ( 14) 则 不仅与系统的柔性变量有关, 还代表了柔性空间机 械臂系统的柔性运动部分。
间机械臂系统结构见图 1。
引 言
空间机械臂的研究 受到了研究人员的广泛重 视 。 由于所处空间环境的特殊性, 空间机械臂与载 体之间存在着强烈的动力学耦合作用 , 因此其动力 学与控制远较地面固定机械臂复杂 [ 2] 。与刚性空间 机械臂相比, 柔性空间机械臂具有质量轻、 负载大等 优点, 其在未来空间活动中的应用将会越来越广。 然 而 , 目前已有空间机械臂系统的研究绝大部分以刚 [ 35] 性空间机械臂为研究对象 , 而针对柔性空间机械 臂系统的研究却相对较少。 因此 , 柔性空间机械臂的 动力学与控制应该给予关注。 近年来 , 奇异摄动理论 的持续发展为解决柔性系统的控制提供了有效的途 径 。 本文基于奇异摄动理论对柔性空间机械臂协 调运动的控制及振动抑制进行了探讨。利用拉格朗 日方法 , 建立了系统的动力学模型, 借助于奇异摄动 法 , 将系统分解为代表大范围刚性运动的慢变子系 统和代表小范围弹性振动的快变子系统。针对这两 个子系统分别设计了模糊终端滑模控制方案和基于 降阶状态观测的L QR 控制策略。 数值模拟结果证实 了本文控制方法的有效性。
1 柔性空间机械臂系统动力学分析
不失一般性 , 考虑作平面运动的漂浮基柔性空
国家自然科 学基金资助项目 ( 编号 : 10672040) 收稿日期 : 200911-26; 修改稿收到日期 : 2009-1231
482
振 动、测 试 与 诊 断 第 30 卷
的质量为 m 1 ; 相应的中心转动惯量为 J 1; B 2 单位长 度的均匀质量密度为 , 其均匀弯曲刚度为 EI ; C 为 系统总质心; 系统总质量 M = m 0+ m 1 + l2 。 建 立平动的惯性坐标系 ( O-X Y ) , 并考虑各分 体沿 X , Y 面作平面运动的情况。于是 , 由假设模态 法可得柔性臂横向弹性变形 ( x 2 , t ) 为截断模态函 数的展开, 即
q
+
Cr ( ! , !, q, q) Cf ( ! , !, q, q)
5× 5
+
0 Kq
=
I 0
∀ ( 3)
得到柔性空间机械臂的慢变子系统为 ! = Dr-r 1( - Cr + ∀ s) t/ # , 定义新的状态变量z 1= ∃- ∃和 z2 =¨来自( 11) # ∃。 于
・
为了导出相应的快变子系统, 引入快变时标 % = 是, 式 ( 8) 则为 dz 2 21 r 22 f s 21 d % = - H C - H ( C + K ∃) + H ∀ ( 12) 由于慢变时标与快变时标相互独立 , 且在边界 层的区域 #→ 0 内慢变分量可视为常数( 即 d ∃/ d % = # ∃ = 0) 。此时 , 如 果令 #= 0, 并将式 ( 10) 代入 式( 12) , 得
¨ ¨ ・
=
D rf Df f
- 1
( 4)
2× 2
; H12 = H 21 ∈R
; H22 ∈ R
; D rr =
( H11 - H 12H H 21) 。 将式( 3) 的等号两边乘以式 ( 4) , 并重新整理各 项, 得 ! = - H11 Cr - H 12( Cf + Kq) + H11 ∀
( 1) H= 其中 : H 11 ∈R
1
H11 H21
3× 3
其中 : n 为截断项数 ; i ( x 2 ) 为柔性 臂第 i 阶模态函 数 ; q i ( t ) 为与 i ( x 2 ) 对应的模态坐标。 取式( 1) 的前 2 阶模态进行分析, 即 ( x 2, t ) = ( x 2 ) q 1( t ) + 2( x 2 ) q 2 ( t ) 。由系统位置的几何关系及 总质心定义, 可求得 r0 = rC + L 00e 0 + L 01e1 + L 02 e2 + ( L 03q 1 + L 04 q 2) e 3 r1 = rC + L 10e 0 + L 11e1 + L 12 e2 + ( L 13q 1 + L 14 q 2) e 3 r2 = rC + L 20e 0 + L 21e1 + L 22 e2 + ( L 23q 1 + L 24 q 2 + ) e3 其中: r C 为系统总质心 C 相对于原点 O 的矢径; L ij ( i = 0, 1, 2; j = 0, 1, 2, 3, 4) 为系统惯性参数的组合函 ~= [ 0, 1; - 1, 0] 。 数 ; e3 = ~ Ie 2, 且 I 忽略微弱的重力梯度, 载体位置不受控、 姿态受 控的柔性空间机械臂系统 , 为无外力作用的自由浮 动 无根多体系统 , 系统遵守对 ( O X Y ) 的动量守恒 关系。不失一般性, 设系统的初始动量为零( 即 r C = 0) 。 若以 x 0 轴相对于 Y 轴的偏角 ! 0( 载体姿态角 ) 、 x1 轴相对 x 0 轴的转角 ! 1、 x 2 轴相对 x 1 轴的转角 ! 2 及柔 性臂的模态变量 q 1 和 q 2 为系统的广义坐标 , 则由拉 格朗日方程可得柔性空间机械臂的系统动力学方程 为 D( ! , q) !
T 阵 ; ∀= ( ∀ 0 ∀ 1 ∀2) 为载体姿态及机械臂各关节铰
控制力矩所组成的列向量。
第 5 期
陈志勇 , 等 : 柔性空间机械 臂振动抑制的模糊终端滑模控制
483
d z2 22 s 1 21 f d% = - H K z + H ∀ 形式描述的快变子系统为 z = Af z + Bf ∀f 其中: Af = 0 H 21 0 - H22K s I 0