计算机控制课程设计
计算机控制课程设计

计算机控制课程设计
计算机控制课程设计是一项重要的任务,它可以帮助我们更好地理解计算机控制的原理。
本文将详细介绍计算机控制课程设计的步骤。
首先,在准备阶段,必须完成一些准备工作,如建立课程目标,梳理实验内容及顺序,计算出实验总时间,收集教学资料,定制教学过程,准备考试和作业题目,以及定义评价标准。
其次,在教学设计阶段,需要确定实验内容、设计实验空间,提前准备设备,安排教室资源,建立实验报告模板,编写实验教学大纲,准备课件,编写实验操作文档,设计试验流程与步骤,以及安排教学时间。
最后,在实施阶段,教师应根据课程设计的要求,认真讲授,严格按照设计的课程大纲,以及实验步骤进行指导,全程检测学生的学习进度,并给予及时的反馈。
总之,计算机控制课程设计是一项重要的任务,有着各自明确的步骤,需要从准备阶段到实施实验,都有严格的操作,才能保证课程的顺利进行并取得良好的效果。
只有把上述的步骤都做到位,才能保证我们达到设计课程的最终目的。
计算机控制系统课程设计

计算机控制系统课程设计一、课程目标知识目标:1. 理解计算机控制系统的基本原理,掌握控制系统的数学模型和性能指标;2. 学会分析控制系统的稳定性、快速性和准确性,并运用相关理论知识对实际控制系统进行优化;3. 掌握计算机控制系统的设计方法和步骤,能结合实际案例进行控制系统设计。
技能目标:1. 能够运用所学知识,对简单的控制系统进行建模、分析和设计;2. 掌握使用计算机辅助设计软件(如MATLAB/Simulink)进行控制系统仿真的基本技能;3. 培养团队协作和沟通能力,通过小组合作完成课程设计任务。
情感态度价值观目标:1. 培养学生对计算机控制系统课程的兴趣,激发他们探索未知、解决问题的热情;2. 培养学生严谨的科学态度,注重理论与实践相结合,提高他们的工程素养;3. 增强学生的创新意识,鼓励他们在课程设计中勇于尝试新方法,培养创新精神和实践能力。
课程性质分析:本课程为专业核心课程,旨在使学生掌握计算机控制系统的基本理论、方法和技能,培养具备实际控制系统设计与分析能力的高级技术人才。
学生特点分析:学生处于本科高年级阶段,已具备一定的控制系统基础知识和实践能力,具有较强的求知欲和自主学习能力。
教学要求:结合课程性质和学生特点,注重理论与实践相结合,强调动手能力和创新意识的培养。
通过本课程的学习,使学生能够将所学知识应用于实际控制系统设计,提高解决实际问题的能力。
在教学过程中,将课程目标分解为具体的学习成果,以便进行教学设计和评估。
二、教学内容1. 计算机控制系统概述:介绍计算机控制系统的基本概念、发展历程、应用领域及发展趋势。
教材章节:第一章 计算机控制系统引论2. 控制系统数学模型:讲解控制系统的微分方程、传递函数、状态空间模型等数学描述方法。
教材章节:第二章 控制系统数学模型3. 控制系统性能分析:分析控制系统的稳定性、快速性、准确性等性能指标。
教材章节:第三章 控制系统性能分析4. 计算机控制系统设计方法:讲解控制系统设计的基本方法,包括PID控制、状态反馈控制、观测器设计等。
计算机控制课程设计
3.网络控制系统:探讨网络技术在控制系统中的应用,包括远程监控、数据通信等;
4.课程设计中的项目管理:教授学生如何进行项目规划、时间管理、团队协作等项目管理技能;
5.控制系统设计的伦理与法规:讨论在设计过程中应遵守的伦理规范和法律法规,培养学生的社会责任感;
2.控制系统的实时性分析:介绍实时控制系统的概念,讨论如何满足实时性要求,包括任务调度和中断处理;
3.控制算法的优化:研究如何通过调整PID参数、改变控制策略等方法优化控制效果;
4.控制系统安Байду номын сангаас性与可靠性:讨论控制系统在设计过程中如何考虑安全性和可靠性,包括冗余设计、故障安全策略等;
5.课程设计展示与评价:组织学生进行课程设计的口头报告和实物展示,开展同行评价和教师评价;
5.课程设计实例分析:以温度控制系统为例,分析其设计过程及注意事项;
6.课程设计实践:学生分组进行计算机控制系统设计,完成硬件搭建、软件编程及调试;
7.课程设计报告撰写:培养学生撰写技术文档的能力。
本节课旨在让学生掌握计算机控制系统的设计方法,提高学生的实践操作能力和团队协作能力,为今后从事相关领域工作打下坚实基础。
6.课程设计的成果转化:引导学生如何将课程设计的成果转化为实际应用,鼓励学生参与科研项目或创新竞赛;
7.综合能力提升:通过综合性的课程设计实践,提升学生的分析问题、解决问题、创新设计以及沟通表达等综合能力。
5、教学内容
本节课将深化以下教学内容:
1.控制系统设计的用户体验:探讨如何将用户需求融入控制系统设计,提高系统的操作便捷性和交互体验;
6.创新思维的培养:鼓励学生在课程设计过程中提出创新点,培养学生的创新意识和能力;
计算机控制课程设计

计算机控制课程设计一、课程目标知识目标:1. 让学生掌握计算机控制系统的基础理论知识,包括控制系统的组成、工作原理和性能指标;2. 使学生了解常见传感器的工作原理,并能运用所学知识分析传感器的选用原则;3. 让学生掌握计算机控制算法的基本原理,如PID控制、模糊控制等。
技能目标:1. 培养学生运用计算机编程软件(如MATLAB)进行控制系统仿真的能力;2. 培养学生设计简单的计算机控制系统硬件电路,并进行调试的能力;3. 提高学生运用所学知识解决实际计算机控制问题的能力。
情感态度价值观目标:1. 培养学生对计算机控制技术产生浓厚的兴趣,激发学生的学习热情;2. 培养学生具备团队协作精神,学会与他人共同探讨、分析和解决问题;3. 增强学生的创新意识,培养学生在面对实际问题时敢于尝试、勇于突破的精神。
分析课程性质、学生特点和教学要求:本课程为计算机控制技术的实践性课程,旨在培养学生的实际操作能力和创新能力。
学生处于高年级阶段,已具备一定的专业基础知识和实践能力。
教学要求注重理论与实践相结合,强调学生的动手实践能力和解决实际问题的能力。
二、教学内容1. 计算机控制系统概述- 控制系统基本概念- 控制系统发展历程- 计算机控制系统的优势与应用2. 控制系统硬件组成- 控制器硬件结构- 传感器及其接口技术- 执行器及其接口技术3. 计算机控制算法- PID控制算法原理- 模糊控制算法原理- 其他先进控制算法介绍4. 控制系统仿真与设计- MATLAB/Simulink软件介绍- 控制系统仿真模型搭建- 控制系统硬件设计及调试5. 实际案例分析与讨论- 典型计算机控制系统案例分析- 学生分组讨论实际控制问题- 创新性控制系统设计实践教学内容安排与进度:第一周:计算机控制系统概述第二周:控制系统硬件组成第三周:计算机控制算法第四周:控制系统仿真与设计第五周:实际案例分析与讨论教材章节及内容列举:第一章:计算机控制系统概述(涵盖教学内容1)第二章:控制系统的硬件与接口技术(涵盖教学内容2)第三章:计算机控制算法(涵盖教学内容3)第四章:控制系统的仿真与设计(涵盖教学内容4)第五章:计算机控制系统应用案例(涵盖教学内容5)三、教学方法本课程采用以下多样化的教学方法,以充分激发学生的学习兴趣和主动性:1. 讲授法:用于讲解计算机控制系统的基本概念、原理和算法等理论知识。
计算机控制技术课程设计

计算机控制技术课程设计一、教学目标本课程旨在让学生了解和掌握计算机控制技术的基本原理和应用方法。
通过本课程的学习,学生将能够:1.知识目标:理解计算机控制技术的基本概念、原理和特点;熟悉计算机控制系统的组成和分类;掌握常见的计算机控制算法和应用。
2.技能目标:能够运用计算机控制技术解决实际问题;具备分析和设计简单计算机控制系统的的能力。
3.情感态度价值观目标:培养学生对计算机控制技术的兴趣和好奇心,提高学生运用科学技术解决实际问题的意识。
二、教学内容本课程的教学内容主要包括以下几个部分:1.计算机控制技术概述:计算机控制技术的起源、发展及其在各个领域的应用。
2.计算机控制系统的基本原理:模拟计算机控制系统、数字计算机控制系统、混合计算机控制系统。
3.计算机控制系统的组成:控制器、执行器、传感器、反馈元件等。
4.计算机控制算法:PID控制算法、模糊控制算法、神经网络控制算法等。
5.计算机控制技术的应用:工业自动化、交通运输、楼宇自动化等。
三、教学方法为了提高教学效果,本课程将采用多种教学方法相结合的方式进行教学:1.讲授法:通过讲解计算机控制技术的基本概念、原理和特点,使学生掌握相关知识。
2.案例分析法:分析实际案例,使学生更好地理解计算机控制技术的应用。
3.实验法:让学生动手进行实验,培养学生的实际操作能力和解决问题的能力。
4.讨论法:学生进行课堂讨论,激发学生的思考,提高学生的表达能力。
四、教学资源为了支持本课程的教学,我们将准备以下教学资源:1.教材:选用国内权威出版社出版的计算机控制技术教材。
2.参考书:提供相关的计算机控制技术参考书籍,供学生自主学习。
3.多媒体资料:制作课件、教学视频等,丰富教学手段,提高教学效果。
4.实验设备:准备计算机控制系统实验装置,让学生能够实际操作,加深对知识的理解。
五、教学评估为了全面、客观地评估学生的学习成果,本课程将采用以下评估方式:1.平时表现:通过课堂参与、提问、讨论等方式,评估学生的学习态度和积极性。
计算机控制技术课程设计-温度控制系统设计
计算机控制技术课程设计-温度控制系统设计引言温度控制是在很多工业和生活应用中至关重要的一项技术。
随着计算机控制技术的发展和普及,利用计算机控制温度已经成为一种常见的方法。
本文将介绍一个基于计算机控制技术的温度控制系统设计。
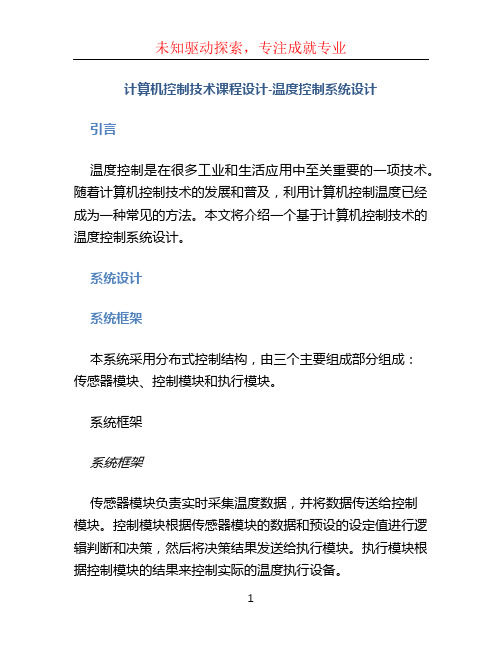
系统设计系统框架本系统采用分布式控制结构,由三个主要组成部分组成:传感器模块、控制模块和执行模块。
系统框架系统框架传感器模块负责实时采集温度数据,并将数据传送给控制模块。
控制模块根据传感器模块的数据和预设的设定值进行逻辑判断和决策,然后将决策结果发送给执行模块。
执行模块根据控制模块的结果来控制实际的温度执行设备。
硬件设计本系统需要以下硬件组件:•温度传感器:用于实时采集温度数据。
•控制器:用于运行控制模块的程序。
•执行器:用于控制温度执行设备。
软件设计本系统需要以下软件组件:•控制程序:负责接收温度传感器传输的数据,进行逻辑判断和决策,并将结果发送给执行程序。
•执行程序:根据控制程序的结果控制实际的温度执行设备。
•用户界面:提供友好的用户界面,用于设定温度控制的设定值和查看实时的温度数据。
系统流程系统主要分为三个阶段:温度数据采集、控制决策和执行控制。
温度数据采集1.温度传感器开始采集温度数据。
2.传感器将采集到的温度数据发送给控制程序。
控制决策1.控制程序接收到温度数据。
2.控制程序根据预设的设定值和温度数据进行逻辑判断。
3.根据逻辑判断结果,控制程序生成相应的控制方案。
4.控制程序将控制方案发送给执行程序。
执行控制1.执行程序接收到控制方案。
2.执行程序根据控制方案控制实际的温度执行设备。
3.执行程序将执行结果反馈给控制程序。
功能设计温度设定功能用户可以通过用户界面设定温度控制的设定值。
用户界面将设定值发送给控制程序,控制程序将设定值存储在内存中。
实时数据显示功能用户界面可以实时显示温度传感器采集到的温度数据。
温度数据通过控制程序发送给用户界面,并在用户界面显示。
控制逻辑设计控制程序根据采集的温度数据和设定值进行逻辑判断,判断温度是否超过设定值的上限或下限。
计算机控制技术课程设计
计算机控制技术课程设计引言计算机控制技术是指利用计算机对各种物理量进行检测、测量、处理和控制的技术。
它不仅是现代工业自动化的基础技术,也是通往物联网发展的必经之路。
本课程设计旨在通过实际操作,加深学生对计算机控制技术的理解和掌握,提高学生控制系统设计和开发的能力。
实践任务任务一:简单控制系统设计设计一个从传感器到执行机构进行物理量检测、处理和控制的简单控制系统。
任务包括以下几个部分:1.利用Arduino开发板和相关传感器(光敏传感器、温度传感器、压力传感器等)进行物理量检测和数据采集;2.利用计算机对采集到的数据进行处理、分析和显示;3.根据处理结果,控制执行机构(LED灯、电机、舵机等)进行相应的操作。
任务二:智能小车控制系统设计设计一个基于计算机控制技术的智能小车控制系统。
任务包括以下几个部分:1.利用Arduino开发板、电机驱动板、超声波传感器等组成智能小车;2.设计运动控制算法,并利用计算机将算法转化为控制指令;3.对运动过程中的数据进行采集、处理、分析和显示;4.可以根据不同的控制策略(如距离控制、线路规划等)进行控制。
实践方法1.首先,学生需要学习基本的计算机控制技术理论和实践操作;2.在完成实践任务之前,学生需要练习利用Arduino开发板进行项目开发的基本技能;3.学生需要进行实验设计和实验过程管理,根据实验结果不断迭代优化设计;4.学生需要通过团队合作完成实验任务。
实践成果通过本次课程设计,学生将能够:1.理解并掌握计算机控制技术的基本原理和方法;2.熟悉计算机控制系统的组成和基本运作流程;3.学会利用Arduino开发板进行项目开发;4.掌握运动控制算法的设计、优化和实现方法;5.具备基本的实验设计和实验过程管理能力。
结论计算机控制技术在现代工业自动化和物联网发展中发挥着越来越重要的作用。
通过本次课程设计,学生将从实践中深入理解和掌握计算机控制技术,并为以后的学习和工作打下基础。
计算机控制系统课程设计
4.案例分析:
-分析计算机控制系统在工业生产、交通运输、医疗设备等领域的应用案例;
-讨论不同场景下控制系统的设计要点和解决方案。
5.课程设计任务:
-分组进行课程设计,根据任务书要求设计计算机控制系统;
-结合实际案例,自主选择控制器类型,完成控制系统设计。
-指导学生根据仿真和实验结果,对控制系统设计进行优化;
-探讨不同控制策略的优缺点,鼓励学生创新思维,提出改进方案。
3.小组讨论:
-鼓励学生以小组形式进行讨论,分享设计过程中的心得体会;
-分析各自设计的控制系统性能,比较不同设计方案的效果。
4.知识拓展:
-引导学生了解当前计算机控制系统领域的前沿技术和研究动态;
-引导学生结合实际应用场景,探索计算机控制系统的创新设计和应用。
4.教学评估:
-收集学生对课程设计的意见和建议,进行教学评估;
-分析评估结果,为后续课程设计和教学改进提供参考。
5.跨学科融合:
-强调计算机控制系统与其他学科领域的融合,如自动化、电子工程、机械工程等;
-鼓励学生拓宽视野,掌握跨学科知识,提升综合应用能力。
6.报告撰写与评价:
-指导学生按照规范撰写课程设计报告,包括系统设计、仿真分析、实验结果等;
-制定评价标准,对学生的课程设计成果进行评价和反馈。
3、教学内容
1.实践操作:
-组织学生进行实验室实践,实际操作计算机控制系统硬件设备;
-引导学生结合理论知识,调试和优化控制器参数,观察控制效果。
2.设计优化:
6.未来规划:
-与学生探讨计算机控制系统在未来的发展趋势和职业规划;
-鼓励学生树立长远目标,为未来从事相关领域工作做好准备。
计算机控制系统课程设计
计算机控制系统课程设计一、教学目标本课程旨在让学生掌握计算机控制系统的基本原理、方法和应用,培养学生运用计算机技术分析和解决控制问题的能力。
具体目标如下:1.知识目标:(1)了解计算机控制系统的基本概念、分类和特点;(2)掌握控制系统的数学模型建立和仿真方法;(3)熟悉常见控制器的设计方法和性能分析;(4)掌握计算机控制系统的实现技术和应用领域。
2.技能目标:(1)能够运用数学模型分析和解决计算机控制系统问题;(2)具备使用控制系统仿真软件进行仿真分析的能力;(3)能够根据实际需求设计合适的控制器,并分析其性能;(4)具备计算机控制系统设计和调试的基本技能。
3.情感态度价值观目标:(1)培养学生对计算机控制系统的兴趣和好奇心;(2)培养学生勇于探索、创新的精神,提高自主学习能力;(3)培养学生团队协作意识和沟通能力;(4)培养学生关注社会热点,将所学知识应用于实际问题的意识。
二、教学内容本课程的教学内容主要包括以下几个部分:1.计算机控制系统概述:计算机控制系统的定义、分类、特点和应用领域;2.控制系统的数学模型:控制系统数学模型的建立、仿真和分析;3.控制器设计方法:PID控制、模糊控制、神经网络控制等控制器设计方法;4.计算机控制系统实现技术:硬件选型、软件设计、系统调试等;5.计算机控制系统应用案例:工业生产、航空航天、生物医学等领域的应用实例。
三、教学方法为实现教学目标,本课程将采用以下教学方法:1.讲授法:系统地传授理论知识,引导学生掌握基本概念和原理;2.案例分析法:通过分析实际案例,使学生了解计算机控制系统的应用和设计方法;3.实验法:学生进行实验,提高学生的动手能力和实际问题解决能力;4.讨论法:学生分组讨论,培养学生的团队协作和沟通能力。
四、教学资源为实现教学目标,我们将准备以下教学资源:1.教材:选用权威、实用的教材,为学生提供系统、全面的学习资料;2.参考书:提供相关领域的参考书籍,丰富学生的知识体系;3.多媒体资料:制作课件、视频等多媒体资料,提高课堂教学效果;4.实验设备:配置合适的实验设备,为学生提供实践操作的机会。
计算机控制-基于MATLAB实现课程设计
计算机控制-基于MATLAB实现课程设计一、课程设计背景计算机控制是一种将计算机技术应用于控制领域,用计算机对物理过程进行控制的技术。
在当今工业自动化领域,计算机控制技术已经应用得非常广泛。
为此,大学开设了计算机控制课程,旨在培养学生掌握计算机控制的基本理论和方法,能够应用计算机技术解决控制问题的能力。
本文旨在介绍一种针对计算机控制课程设计的实现方法,基于MATLAB实现。
二、课程设计目标通过本课程设计,学生应该能够:1.熟练掌握MATLAB的基本操作。
2.熟悉控制系统的基本模型和控制方法。
3.理解系统方程和信号特性,能够对控制系统设计进行仿真。
4.能够完成一个具体控制问题的设计和仿真,对仿真结果进行分析。
三、课程设计内容1. MATLAB基本操作本部分主要是帮助学生熟悉MATLAB软件的基本操作,包括MATLAB程序编写、变量定义、运算和MATLAB绘图等知识点。
2. 控制系统建模本部分主要介绍了控制系统建模的方法,包括利用拉普拉斯变换对线性时不变系统进行数学建模。
并结合具体案例,进行控制器设计和参数调节等。
3. 系统仿真本部分将学生带入MATLAB仿真环境,通过实现和仿真控制系统来理解系统的特性。
仿真内容包括系统初始响应、稳态响应、频率特性响应等。
4. 实验设计和报告本部分将学生组成小组进行控制系统的实验设计,完成实验报告。
实验报告中应该包含实验目的、分析和结果。
同时还需要从MATLAB仿真的角度,对实验结果进行验证和分析。
四、课程设计结果分析通过以上课程设计,对学生的思维能力、创新能力、动手能力等综合素质的培养都有非常积极的意义。
通过本设计,学生能够深入了解计算机控制系统的基本理论和应用实例,提高学生的解决问题的实际操作和计算机仿真的能力。
五、结论计算机控制-基于MATLAB实现课程设计对于学生理解计算机控制的实际应用非常有帮助。
同时,该课程设计还有很好的扩展性,可以引导学生深入了解控制系统的其他相关内容,同时也有助于逐步向实际控制系统设计方向发展。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
计算机控制课程设计————————————————————————————————作者: ————————————————————————————————日期:ﻩ《计算机控制》课程设计报告题目: 超前校正控制器设计姓名: 窦金超学号:1202301022015年6月12日《计算机控制》课程设计任务书学号120230102班级学生窦金超指导教师任倩题目超前校正控制器设计设计时间2014年 6 月 5 日至2014 年 6 月12 日共1周设计要求设计任务:设单位反馈系统的开环传递函数为)15.0()(0+=ssKsG,采用模拟设计法设计超前校正数字控制器,使校正后的系统满足如下指标:(1)速度误差20=Kv;(2)相角裕度o50≥γ;(3) 幅值裕度10≥Kg dB。
方案设计:1.完成控制系统的分析、设计;2.选择元器件,完成电路设计,控制器采用MCS-51系列单片机(传感器、功率接口以及人机接口等可以暂不涉及),使用Protel绘制原理图;3.编程实现单片机上的控制算法。
报告内容:1.控制系统仿真和设计步骤,应包含性能曲线、采样周期的选择、数字控制器的脉冲传递函数和差分方程;2.元器件选型,电路设计,以及绘制的Protel原理图;3.软件流程图,以及含有详细注释的源程序;4.设计工作总结及心得体会;5.列出所查阅的参考资料。
指导教师签字: 系(教研室)主任签字:215年6月5日1. 控制系统的分析和设计1.1实验要求设单位反馈系统的开环传递函数为)15.0()(0+=s s Ks G ,采用模拟设计法设计超前校正数字控制器,使校正后的系统满足如下指标:(1) 速度误差20=Kv ;(2) 相角裕度o50≥γ; (3) 幅值裕度10≥Kg dB 。
1.2系统分析(1)首先调整增益K 使系统的稳态误差满足要求,即系统应首先满足速度误差系数的要求,为使系统满足速度误差系数的要求可得:0lim20(0.51)S KKv s s →==⋅+(1)故可求得:K Kv==20(2)(2)用matlab画出未校正前系统的bode图(2.1)matlab程序如下:numl=[00 20];denl=[0.5 1 0];G=tf(numl,denl);W=logspace(-1,2,200);bode(G,W)margin(G);[Gm,Pm,Wcg,Wcp]=margin(G);[Gm,Pm,Wcg,Wcp](2.2)程序运行结果:>> Untitled1ans =Inf17.9642Inf 6.1685(2.3)bode图为:图1 未校前正系统的b ode 图(2.4)系统性能分析及校正方法选择:由仿真结果知:当系统的速度误差系数满足要求时,系统的幅值裕度为无穷大,故幅值裕度满足要求;而系统的相角裕度为17.9642,小于要求值50,因此,需要串联一个超前环节来对系统进行校正,即采用串联超前校正。
1.3模拟控制器设计(1)、确定剪切频率c ω:由未校正系统的b ode 图可得:20 lg20=20lg2+4lg2wc 0(3)从而求得:0210 6.32/c rad sω==(4) 进而可得相角裕度为:018090arctan(0*)90arctan(0.5*210)17.6r wc T =--=-=。
(5)-50050M a g n i t u d e (d B )10-110101102-180-135-90P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/s) , Pm = 18 deg (at 6.17 rad/s)Frequency (rad/s)(2)、由分析知系统应引进相位超前校正网络,故设控制器的传递函数为1()1TS Gc s S α+=T + (1)α<。
(6)(3)、计算所需的相角超前量m φ,由题意知:05017.6 5.638m r r φσ=-+=-+=。
(7)(4)、根据38m φ=可以确定系数α:1sin 1sin 380.241sin 1sin 38m m φαφ--===++。
(8)(5)、对应于m φ的m w 处的幅值增量应为:1110lg10lg6.20.24dB α==(9)所以在校正前系统的b od e图上有:2206.220lg 10.25dB wc wc-=+(10)所以解得: 9/wc wm rad s == 。
(11)(6)、校正装置的转折频率分别为:11 4.4/w wm rad s Tα=== (12)12/9/0.2418.3/w wm rad s Tαα====(13)110.231 4.4T w === (14)αT =0.24*0.23=0.055(15)故矫正装置的传递函数为:0.231()0.0551S Gc s S +=+(16)(7)、校正后系统的开环传递函数为:0320.23120 4.620()()()0.0551(0.51)0.02750.555S S G s G s Gc s S S S S S S++=⋅=⨯=+⋅+++(17)(8)、根据校正后的开环频率特性验算相角裕度和幅值裕度:180()18090arctan(0.23)arctan(0.055)arctan(0.5)50.43r wc wc wc wc φ=+=-+--= KgdB =∞(18)、(19)综上,在20Kv = 的前提下,校正后系统的剪切频率为:9/wc rad s = ,相角裕度大于50 ,幅值裕度为∞ ,完全满足系统静动态性能指标要求。
(9)、对校正后的网络进行matlab 仿真: (9.1)、matlab 程序为:num c=[0.23 1]; denc=[0.055 1]; G c=t f(nu mc,d enc) W=logsp ace(-1,3,100); fig ure(2) bo de(Gc ,W );gri d G_o=Gc *G fi gure(3) mar gin(G_o);[Gm ,Pm,Wcp]=ma rgin(G_o); [Gm,Pm ,Wcg,Wcp](9.2)、程序运行的结果为:>> Untitled2Gc =0.23s+ 1-----------0.055s + 1Continuous-time transfer function.G_o=4.6 s + 20--------------------------0.0275s^3+ 0.555 s^2 + sContinuous-time transferfunction.ans =Inf50.4719 Inf Inf (9.3)、校正后的bode图为:图2 校正后连续系统的bode 图图3 控制器的bode 图 (9.4)、通过matlab 的仿真结果可以得出,加入控制器后,在满足系统的速-100-50050M a g n i t u d e (d B )10-1100101102103-180-135-90P h a s e (d e g )Bode DiagramGm = Inf dB (at Inf rad/s) , Pm = 50.5 deg (at 8.95 rad/s)Frequency (rad/s)051015M a g n i t u d e (d B )10-1100101102103010203040P h a s e (d e g )Bode DiagramFrequency (rad/s)度误差系数的前提下,系统的幅值裕度依然满足要求;此外,通过仿真还可以得出,经过串联超前校正后,系统的相角裕度变为50.4719r=,完全满足系统的性能指标中对相角裕度50r=的要求。
(10)、用matlab绘出系统校正前后的单位阶跃响应曲线:(10.1)、matlab绘制单位阶跃响应曲线的程序如下:numl=[0 020];denl=[0.51 0];G=tf(numl,denl);W=logspace(-1,2,200);numc=[0.231];denc=[0.0551];Gc=tf(numc,denc)W=logspace(-1,3,100);figure(2)bode(Gc,W);gridG_o=Gc*GG_1=feedback(G,1)G_o1=feedback(G_o,1)num=[00 20];den=[0.5 1 20];numd=[004.620];dend=[0.02750.555 5.620];t=0:0.005:5;figure(4);[c1,x1,t]=step(num,den,t);[c2,x2,t]=step(numd,dend,t);plot(t,c1,':k',t,c2,'-k')gr idlegend ('G 1校正前','G_01校正后')(10.2)、程序运行结果如下:>> Untitled3Tran sfer fun cti on:20----------------0.5 s^2 + s + 20Trans fer f unc tio n:4.6 s + 20-----------------------------------0.0275 s^3 + 0.555 s^2 + 5.6 s + 20>>(10.3)、校正前后系统的单位阶跃响应曲线:图4 校正前后系统的单位阶跃响应曲线00.51 1.52 2.53 3.54 4.5500.20.40.60.811.21.41.61.8 G 1校正前G o 1校正后1.4模拟法设计数字控制器(1)、模拟控制器的离散化设计:采用双线性变换法(t ustin )进行离散化(2)、采样周期的选择:考虑到A/D 转换、D/A转换的时间、数据处理的精度,以及单片机计算的时间,故采样周期不能太大也不能太小,不妨取T=0.01s (在后面的控制中可得知取采样周期为T=0.01s 完全满足要求)。
(3)、将模拟控制器离散化,模拟控制器离散化后的传递函数为:2110.2310.470.45()|0.05510.120.10z s T z S z Gc z S z -=⋅++-==+- (20)(4)、将被控对象离散化,被控对象离散化后的传递函数为: 222110.00099010.00120()|980.00099011(0.51).980.9802z s T z z z Gp s z z S S -=⋅+++-+==⋅+(21)(5)、绘制校正后离散系统的伯德图:(5.1)、m atla b仿真程序如下:n um1=[0.23 1];d en1=[0.055 1];GC1=tf (num1,den1);G C1G Z1=c2d(GC1,0.01,'t ust in');GZ1num0=[20];den0=co nv ([1 0],[0.5 1]);Gp=tf(num 0,de n0);GZ2=c2d(Gp,0.01,'t ust in')GZ2GZ=GZ1*GZ2;GZmargin(GZ);(5.2)、程序的运行结果如下所示:>>Untitled4GC1 =0.23 s+ 1-----------0.055s + 1Continuous-time transferfunction.GZ1 =3.917z - 3.75--------------z - 0.8333Sample time: 0.01secondsDiscrete-time transfer function.GZ2=0.0009901z^2 + 0.00198 z +0.0009901-------------------------------------z^2 - 1.98z + 0.9802Sample time: 0.01secondsDiscrete-time transfer function.GZ2 =0.0009901 z^2 + 0.00198 z+ 0.0009901-------------------------------------z^2 -1.98z + 0.9802Sample time: 0.01 secondsDiscrete-time transfer function.GZ=0.003878 z^3 +0.004043 z^2-0.003548z- 0.003713---------------------------------------------------z^3- 2.814z^2+ 2.63 z -0.8168Sample time:0.01 secondsDiscrete-timetransfer function.>>(5.3)、离散系统的bode图如下所示:图5 离散后系统的b od e图(6)、绘制校正后离散系统的单位阶跃响应曲线:通过ma tlab 编程的方法得出系统的单位阶跃响应曲线(6.1)mat lab程序如下所示:n um1=[0.23 1];den 1=[0.055 1];GC1=tf(n um1,den 1);GC1GZ1=c2d (GC1,0.01,'tust in');GZ 1num0=[20];den 0=c on v([1 0],[0.5 1]);G p=tf (num 0,den0);GZ2=c2d (Gp,0.01,'tu st in')GZ2GZ=GZ 1*GZ 2;-400-300-200-1000100M a g n i t u d e (d B )10-1100101102103-225-180-135-90P h a s e (d e g )Bode DiagramGm = 372 dB (at 314 rad/s) , Pm = 50.5 deg (at 8.95 rad/s)Frequency (rad/s)margin(GZ);T=feedback(GZ,1);step(T);(6.2)系统的运行结果如下:>>Untitled5GC1 =0.23s + 1-----------0.055 s + 1Continuous-time transfer function.GZ1 =3.917 z -3.75--------------z - 0.8333Sample time: 0.01secondsDiscrete-time transfer function.GZ2 =0.0009901 z^2 + 0.00198 z+ 0.0009901-------------------------------------z ^2 - 1.98 z + 0.9802Sample t ime: 0.01 second sD iscrete -time t ran sfe r fu nct ion .G Z2 =0.0009901 z^2 + 0.00198 z + 0.0009901-------------------------------------z^2 - 1.98 z + 0.9802Sam ple time: 0.01 sec on dsDisc re te-tim e trans fer functi on.(6.3)校正后离散系统的单位阶跃响应曲线如下所示:图6 离散后系统的单位阶跃响应曲线2、对离散化后的系统进行sim ulink 仿真:00.10.20.30.40.50.60.70.800.20.40.60.811.21.4Step ResponseTime (seconds)A m p l i t u d e2.1目的:通过进行simulink 仿真以观察离散化后的系统对单位阶跃输入、单位速度输入的响应情况,并以此看离散化后的系统能否满足我们对系统静动态性能的要求,并以此为依据进一步修改控制器的设计。