安川机器人命令一览所有指令介绍
安川机器人 命令介绍-内部版
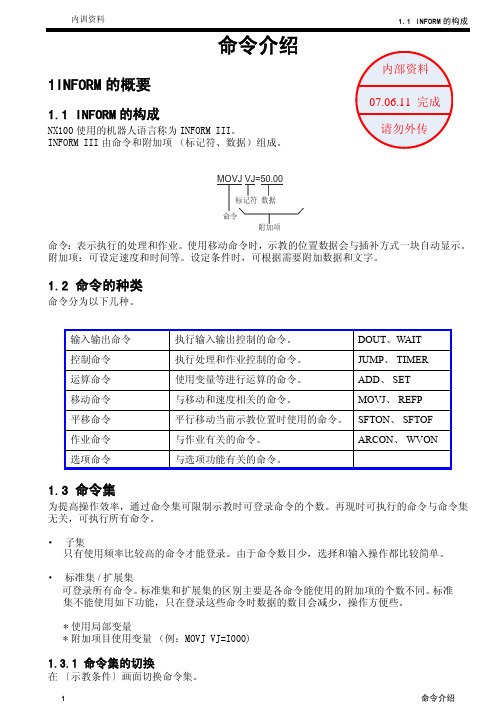
1.1 INFORM 的构成内训资料命令介绍1INFORM 的概要1.1 INFORM 的构成NX100使用的机器人语言称为INFORM III。
INFORM III 由命令和附加项(标记符、数据)组成。
命令:表示执行的处理和作业。
使用移动命令时,示教的位置数据会与插补方式一块自动显示。
附加项:可设定速度和时间等。
设定条件时,可根据需要附加数据和文字。
1.2 命令的种类命令分为以下几种。
1.3 命令集为提高操作效率,通过命令集可限制示教时可登录命令的个数。
再现时可执行的命令与命令集无关,可执行所有命令。
·子集只有使用频率比较高的命令才能登录。
由于命令数目少,选择和输入操作都比较简单。
·标准集/扩展集 可登录所有命令。
标准集和扩展集的区别主要是各命令能使用的附加项的个数不同。
标准 集不能使用如下功能,只在登录这些命令时数据的数目会减少,操作方便些。
*使用局部变量*附加项目使用变量(例:MOVJ VJ=I000)1.3.1 命令集的切换在〔示教条件〕画面切换命令集。
输入输出命令执行输入输出控制的命令。
DOUT 、 WAIT控制命令执行处理和作业控制的命令。
JUMP 、TIMER 运算命令使用变量等进行运算的命令。
ADD 、SET 移动命令与移动和速度相关的命令。
MOVJ 、REFP 平移命令平行移动当前示教位置时使用的命令。
SFTON 、SFTOF 作业命令与作业有关的命令。
ARCON 、WVON选项命令与选项功能有关的命令。
1.4 命令中能使用的变量 内训资料1.4 命令中能使用的变量设定为标准集和扩展集时,变量可以作为附加项的数据使用。
扩展集还可使用局部变量。
但是附加项变量的单位和数值的单位是不一样的。
2 命令的登录2.1 命令的登录在程序内容画面按〔命令一览〕键进行命令的登录。
2.2 命令的学习功能命令的学习功能就是指在登录命令时,缓冲行会显示与上次登录此命令时同样的附加项,这样可使登录更简单方便。
安川机器人 命令介绍-内部版
1.1 INFORM 的构成内训资料命令介绍1INFORM 的概要1.1 INFORM 的构成NX100使用的机器人语言称为INFORM III。
INFORM III 由命令和附加项(标记符、数据)组成。
命令:表示执行的处理和作业。
使用移动命令时,示教的位置数据会与插补方式一块自动显示。
附加项:可设定速度和时间等。
设定条件时,可根据需要附加数据和文字。
1.2 命令的种类命令分为以下几种。
1.3 命令集为提高操作效率,通过命令集可限制示教时可登录命令的个数。
再现时可执行的命令与命令集无关,可执行所有命令。
·子集只有使用频率比较高的命令才能登录。
由于命令数目少,选择和输入操作都比较简单。
·标准集/扩展集 可登录所有命令。
标准集和扩展集的区别主要是各命令能使用的附加项的个数不同。
标准 集不能使用如下功能,只在登录这些命令时数据的数目会减少,操作方便些。
*使用局部变量*附加项目使用变量(例:MOVJ VJ=I000)1.3.1 命令集的切换在〔示教条件〕画面切换命令集。
输入输出命令执行输入输出控制的命令。
DOUT 、 WAIT控制命令执行处理和作业控制的命令。
JUMP 、TIMER 运算命令使用变量等进行运算的命令。
ADD 、SET 移动命令与移动和速度相关的命令。
MOVJ 、REFP 平移命令平行移动当前示教位置时使用的命令。
SFTON 、SFTOF 作业命令与作业有关的命令。
ARCON 、WVON选项命令与选项功能有关的命令。
1.4 命令中能使用的变量 内训资料1.4 命令中能使用的变量设定为标准集和扩展集时,变量可以作为附加项的数据使用。
扩展集还可使用局部变量。
但是附加项变量的单位和数值的单位是不一样的。
2 命令的登录2.1 命令的登录在程序内容画面按〔命令一览〕键进行命令的登录。
2.2 命令的学习功能命令的学习功能就是指在登录命令时,缓冲行会显示与上次登录此命令时同样的附加项,这样可使登录更简单方便。
安川指令表汇总
SUB
SUB
使用例 功能 添加项目 MUL
使用例 功能 添加项目 DIV
使用例
EX〈变量号〉
数据2 常数 B〈变量号〉 I〈变量号〉 D〈变量号〉 R〈变量号〉 P〈变量号〉 BP〈变量号〉 EX〈变量号〉 SUB I012 I013 数据1与数据2相乘,结果存入数据1。 格式:MUL〈数据1〉〈数据2〉 数据1的位置变量可用元素指定。 Pxxx(0):所有轴数据 Pxxx(1):X轴数据 Pxxx(2):Y轴数据 Pxxx(3):Z轴数据 Pxxx(4):Tx轴数据 Pxxx(5):Ty轴数据 Pxxx(6):Tz轴数据 数据1 B〈变量号〉 I〈变量号〉 D〈变量号〉 R〈变量号〉 P〈变量号〉(〈元素号〉) BP〈变量号〉(〈元素号〉) EX〈变量号〉(〈元素号〉)
使用例 功能
REFP 1 设定再现速度。 VJ=(关节速度)
SPEED 添加项目
使用例 输入输出命令
功能
DOUT 添加项目
使用例 功能
PUL(姿态角速度) VE=(外部轴速度) SPEED VJ=50.00
ON/OFF外部输出信号。 OT# (〈输出号〉)、 OGH# (〈输出组号〉)、 OG# (〈输出组号〉) OGH# (xx)无奇偶性确认,只进行二进制指定。 FINE DOUT OT#(12) ON 外部输出信号输出脉冲。 OT# (〈输出号〉) OGH# (〈输出组号〉) OG# (〈输出组号〉)
使用例
功能 RET 添加项目
END NOP TIMER
使用例 功能 添加项目 使用例 功能 添加项目 使用例 功能 添加项目 使用例 功能
IF语句 添加项目
使用例 功能 UNTIL语 添加项目 句
安川机器人程序2

NOP *cycle MOVJ C00000 VJ=100.00 PULSE OT#(68) T=0.50 *Loop1 JUMP *cyclstop IF IN#(16)=ON JUMP *Whip_out IF IN#(18)=ON JUMP *Loop1 *Whip_out PULSE OT#(31) T=1.00 PULSE OT#(16) T=1.00 MOVJ C00001 VJ=100.00 PULSE OT#(57) T=0.50 MOVL C00002 V=1500.0 PL=1 PULSE OT#(58) T=0.50 TIMER T=0.05 WAIT IN#(24)=ON PULSE OT#(59) T=0.50 MOVL C00003 V=1300.0 PL=1 TIMER T=0.20 PULSE OT#(27) T=1.00 PULSE OT#(60) T=0.50 MOVJ C00004 VJ=100.00 PULSE OT#(61) T=0.50 PULSE OT#(62) T=0.50 进入压机前 对中台 吸着位置 对中台
NOP *cycle MOVJ C00000 VJ=100.00 PULSE OT#(68) T=0.50 *Loop1 JUMP *cyclstop IF IN#(16)=ON JUMP *Whip_out IF IN#(18)=ON JUMP *Loop1 *Whip_out PULSE OT#(31) T=1.00 PULSE OT#(16) T=1.00 MOVL C00001 V=1200.0 PL=0 PULSE OT#(58) T=0.50 TIMER T=0.01 WAIT IN#(24)=ON PULSE OT#(59) T=0.50 MOVL C00002 V=1300.0 TIMER T=0.20 PULSE OT#(27) T=1.00 PULSE OT#(60) T=0.50 PULSE OT#(61) T=0.50 MOVL C00003 V=1600.0 PULSE OT#(62) T=0.50 WAIT IN#(22)=ON WAIT IN#(21)=ON 1RB Page 5
安川机器人操作手册简易
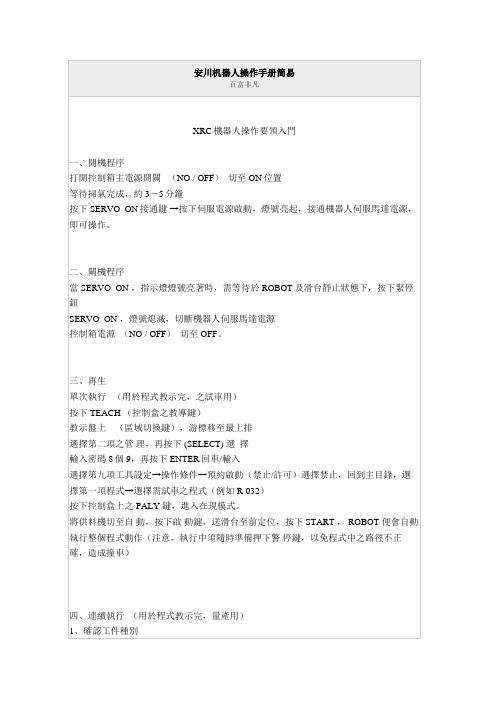
安川机器人操作手册简易百富非凡XRC機器人操作要領入門一、開機程序打開控制箱主電源開關(NO / OFF)切至 ON位置等待掃氣完成,約3-5分鐘按下SERVO ON接通鍵→按下伺服電源啟動,燈號亮起,接通機器人伺服馬達電源,即可操作。
二、關機程序當SERVO ON ,指示燈燈號亮著時,需等待於ROBOT及滑台靜止狀態下,按下緊停鈕SERVO ON ,燈號熄滅,切斷機器人伺服馬達電源控制箱電源(NO / OFF)切至 OFF。
三、再生單次執行(用於程式教示完,之試車用)按下 TEACH (控制盒之教導鍵)教示盤上(區域切換鍵),游標移至最上排選擇第二項之管理,再按下 (SELECT) 選擇輸入密碼8個9,再按下 ENTER回車/輸入選擇第九項工具設定→操作條件→預約啟動(禁止/許可)選擇禁止,回到主目錄,選擇第一項程式→選擇需試車之程式(例如R-032)按下控制盒上之 PALY 鍵,進入在現模式。
將供料機切至自動,按下啟動鍵,送滑台至前定位,按下START , ROBOT 便會自動執行整個程式動作(注意,執行中須隨時準備押下警停鍵,以免程式中之路徑不正確,造成撞車)四、連續執行(用於程式教示完,量產用)1、確認工件種別按下TEACH →按下教示盤上之游標移至最上排選擇第二項之管理,再按下 (SELECT) 選擇輸入8個9,再按下 ENTER回車/輸入選擇第九大項工具設置→操作條件→預約啟動(禁止/許可)選擇(禁止),選擇再回到主目錄第一項,選擇啟動→程序名→選擇程式名稱。
2、執行再生到主目錄第一項,選擇啟動→程序名→選擇程式名稱按下控制盒上之 PLAY鍵將供料機切換至自動模式下按下供料機啟動鍵,供料機旋轉至定位,機器人便會自動執行整個程式動作。
五、教示之程式試運轉(程式教示完之手動再生)按下控制盒上之 TEACH選擇第一大項主菜單,選擇程式選擇要試運轉之程式,(例如:R-032)將供料機切換至自動模式,以自動啟動鍵,送供料機轉至前定位,同時按下教示盤上之 INTER LOCK 及 TEST START ,ROBOT 便會開始執行程式,放開即停止,(完全執行整個程式內容)六、程式撰寫按下控制盒上之SERVO ON ,燈號亮起按下控制盒上之 TEACH教示選擇主菜單上之程式,選擇新建程序輸入程式名稱,(例如:R-032)按下 ENTER,移動游標至最下行,選擇執行0000 NOP0001 MOVJ VJ=100 需有第一點製作,按下ENTER,(程式原點)0002 MOVL V=800 路徑之第二點0003 MOVL V=800 路徑第三點0004 MOVL V=800 路徑第四點0005 MOVL V=800 路徑第五點:↓0010 MOVL V=800 路徑第十點0011 MOVJ VJ=100 回到程式原點12 END註:程式選寫前,先決定執行者教示時ROBOT之運動模式押下教示盤COORD座標系選擇關節直角工具使用者↓↓↓↓各軸滑台工件角度自設↓程式選寫時之路徑決定修改路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標移至行號0003 MOVL V=800 移動ROBOT至欲修改之位置押下MODIFY(變更鍵)押下ENTER (輸入鍵)修改速度0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標移至命令上0003 MOVL V=800 押下選擇MOVL V=800將游標移至速度上押下選擇鍵 V=輸入欲修之速度 V=1000押下ENTER確認 MOVL V=1000確認後再押下ENTER0000 NOP0001 MOVJ VJ=1000002 MOVL V=10000003 MOVL V=800插入路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1) 將ROBOT移至欲增加的點上0003 MOVL V=800 教示新的位置押下 INSERT (插入鍵)再押下 ENTER(輸入鍵)0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1)新插入之路徑會增加在0003 MOVL V=800 (P2) 游標選擇之行號之下0004 MOVL V=800刪除路徑0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P1)將游標移至欲刪除之行號上0003 MOVL V=800(P2)押下 DELETE(刪除鍵)0004 MOVL V=800 再押 ENTER (輸入/回車鍵)0000 NOP0001 MOVJ VJ=1000002 MOVL V=800(P2)0003 MOVL V=800CALL副程式0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 將游標選擇行號,按下 INFORM LIST 0003 MOVL V=800 (指令一覽表)按選擇鍵: CALL:JOB(程式)選擇JOB↓0010 MOVL V=800 選擇須要之副程式【例:(AT-ON)】0011 MOVJ VJ=100 押下選擇 CALL:(AT-ON)0012 END 押下 INSERT(插入鍵)押下 ENTER▼0000 NOP0001 MOVJ VJ=1000002 MOVL V=800 (副程式會自動加在指定行號之下)0003 CALL :(AT-ON)0003 MOVL V=800:↓0010 MOVL V=8000011 MOVJ VJ=1000012 END 行號自動加一範例:(供料機)0000 NOP 需先選擇(機器人移動座標系)方式及程式路徑(運動速度與方式)。
安川机器人命令一览所有指令介绍

安川机器人命令一览所有指令介绍
1、PTP(点到点)指令:PTP指令是一种复杂的指令,用于机器人从
一个位置移动到另一个位置,它的核心是路径规划技术,例如更新机器人
的位置和姿态、点到点移动,以及精确地定位机器人当前的位置。
2、LIN(直线指令):LIN指令是用于支持安川机器人的直线移动的
指令,它包含机器人的位置、姿态和速度等参数。
机器人在用LIN运行时,会按照不同的速度在直线上或路径上移动,可以实现一段路径的直线移动。
3、CIRC(圆弧指令):CIRC指令主要用于支持安川机器人的圆弧移动,其中包括机器人的位置、姿态及速度等参数,可以实现一段路径的圆
弧移动。
4、JOG(即时指令):JOG指令是用于支持安川机器人即时移动的指令,其中可以同时指定机器人的速度、加速度和机器人的位置等参数,可
以实现一段路径的即时移动。
5、PROG(程序指令):PROG指令是支持安川机器人的程序指令,其
中可以同时定义机器人的运动程序,例如直线移动、圆弧移动、PTP移动、JOG移动等。
安川机器人按键功能一览
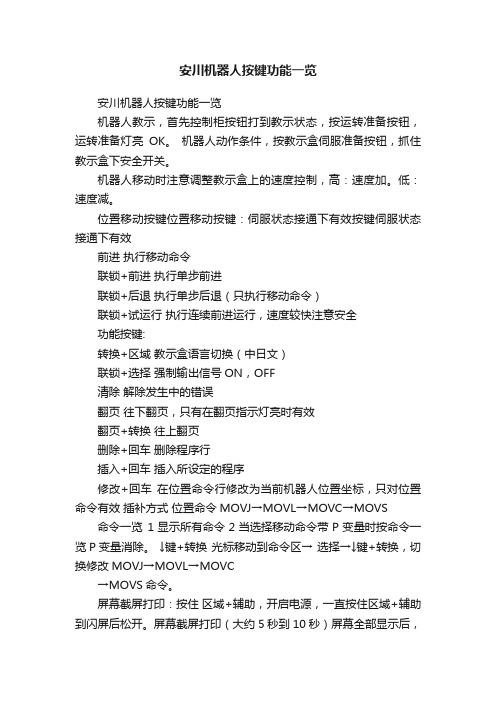
安川机器人按键功能一览安川机器人按键功能一览机器人教示,首先控制柜按钮打到教示状态,按运转准备按钮,运转准备灯亮OK。
机器人动作条件,按教示盒伺服准备按钮,抓住教示盒下安全开关。
机器人移动时注意调整教示盒上的速度控制,高:速度加。
低:速度减。
位置移动按键位置移动按键:伺服状态接通下有效按键伺服状态接通下有效前进执行移动命令联锁+前进执行单步前进联锁+后退执行单步后退(只执行移动命令)联锁+试运行执行连续前进运行,速度较快注意安全功能按键:转换+区域教示盒语言切换(中日文)联锁+选择强制输出信号ON,OFF清除解除发生中的错误翻页往下翻页,只有在翻页指示灯亮时有效翻页+转换往上翻页删除+回车删除程序行插入+回车插入所设定的程序修改+回车在位置命令行修改为当前机器人位置坐标,只对位置命令有效插补方式位置命令MOVJ→MOVL→MOVC→MOVS 命令一览1显示所有命令2当选择移动命令带P变量时按命令一览P变量消除。
↓键+转换光标移动到命令区→ 选择→↓键+转换,切换修改MOVJ→MOVL→MOVC→MOVS命令。
屏幕截屏打印:按住区域+辅助,开启电源,一直按住区域+辅助到闪屏后松开。
屏幕截屏打印(大约5秒到10秒)屏幕全部显示后,选择要截屏打印画面,然后区域+辅助截屏当前画面。
修改速度:进入程序→光标移动至命令区(号码右边)→按转换+选择,按上下键选择范修改速度围→编辑→修改速度→修改速度百分比,所选范围内的位置命令都会改为修改的速度百分比。
复制粘贴,按转换+选择,按上下键选择范围复制粘贴:粘贴命令复制:光标移动到命令区(号码右边)→ 编辑→复制,到所有粘贴的位置后,同样光标移动至命令区(号码右边)→编辑→粘贴→选择(是或否)。
剪切同理。
碰撞报警解除:碰撞报警解除管理模式→机器人→碰撞检测等级→进入指定页→碰撞检测文件号输入9→回车。
功能:有效改为无效。
机器人动作复原后再改回有效。
故障排除:1 显示错误0380,运行中伺服断电请确认R1。
安川机器人搬运码垛程序指令【大全】
1)运动指令指令包括GO、MOVE、MOVEI、MOVES、DRAW、APPRO、APPROS、DEPART、DRIVE、READY、OPEN、OPENI、CLOSE、CLOSEI、RELAX、GRASP及DELAY等。
这些指令大部分具有使机器人按照特定的方式从一个位姿运动到另一个位姿的功能,部分指令表示机器人手爪的开合。
例如:MOVE#PICK!表示机器人由关节插值运动到**PICK所定义的位置。
“!”表示位置变量已有自己的值。
MOVET<位置>,<手开度>功能是生成关节插值运动使机器人到达位置变量所给定的位姿,运动中若手为伺服控制,则手由闭合改变到手开度变量给定的值。
又例如:OPEN[<手开度>]表示使机器人手爪打开到指定的开度。
2)机器人位姿控制指令这些指令包括RIGHTY、LEFTY、ABOVE、BELOW、FLIP及NOFLIP等。
3)赋值指令赋值指令有SETI、TYPEI、HERE、SET、SHIFT、TOOL、INVERSE及FRAME。
4)控制指令控制指令有GOTO、GOSUB、RETURN、IF、IFSIG、REACT、REACTI、IGNORE、SIGNAL、WAIT、PAUSE及STOP。
其中GOTO、GOSUB实现程序的无条件转移,而IF指令执行有条件转移。
IF指令的格式为IF<整型变量1><关系式><整型变量2><关系式>THEN<标识符>该指令比较两个整型变量的值,如果关系状态为真,程序转到标识符指定的行去执行,否则接着下一行执行。
关系表达式有EQ(等于)、NE(不等于)、LT(小于)、GT(大于)、LE(小于或等于)及GE(大于或等于)。
5)开关量赋值指令指令包括SPEED、COARSE、FINE、NONULL、NULL、INTOFF及INTON。
6)其他指令其他指令包括REMARK及TYPE。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
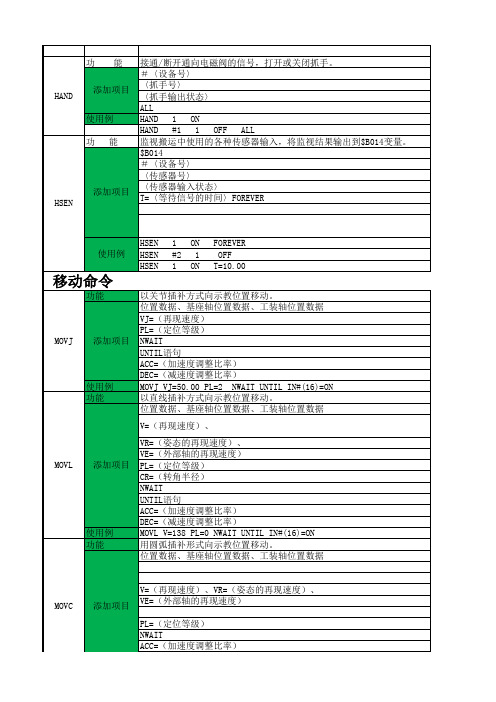
安川机器人命令一览所有指令介绍MOVJ功能以关节插补方式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面中不显示VJ=(再现速度)VJ:0.01~100.00%PL=(定位等级)PL:0~8NWAITUNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVJ VJ=50.00PL=2NWAIT UNTIL IN#(16)=ON MOVL功能以直线插补方式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面中不显示V=(再现速度)、VR=(姿态的再现速度)、VE=(外部轴的再现速度)V:0.1~1500.0mm/秒1~9000cm/分R:0.1~180.0°/秒VE:0.01~100.00%PL=(定位等级)PL:0~8CR=(转角半径)CR:1.0~6553.5mmNWAITUNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVL V=138PL=0NWAIT UNTIL IN#(16)=ON MOVC功能用圆弧插补形式向示教位置移动。
添加项目位置数据、基座轴位置数据、工装轴位置数据画面不显示V=(再现速度)、VR=(姿态的再现速度)、VE=(外部轴的再现速度)与MOVL相同。
PL=(定位等级)PL:0~8NWAITACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVC V=138PL=0NWAIT10基本命令一览DX10010.1移动命令10-2MOVS功能以自由曲线插补形式向示教位置移动添加项目位置数据、基座轴位置数据、工装轴位置数据画面不显示V=(再现速度)、VR=〈姿势的再现速度〉、VE=〈外部轴的再现速度〉与MOVL相同。
PL=(定位等级)PL:0~8NWAITACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例MOVS V=120PL=0IMOV功能以直线插补方式从当前位置按照设定的增量值距离移动。
添加项目P(变量号)、BP(变量号)、EX(变量号)V=(再现速度)VR=(姿态的再现速度)、VE=(外部轴的再现速度)与MOVL相同。
PL=(定位等级)PL:0~8NWAITBF、RF、TF、UF#(用户坐标号)BF:基座坐标RF:机器人坐标TF:工具坐标UF:用户坐标UNTIL语句ACC=(加速度调整比率)ACC:20~100%DEC=(减速度调整比率)DEC:20~100%使用例IMOV P000V=138PL=1RFREFP功能设定摆动壁点等参照点。
添加项目(参照点号)画面不显示位置数据、基座轴数据、工装轴数据摆焊壁点1:1摆焊壁点2:2使用例REFP1SPEED功能设定再现速度。
添加项目VJ=(关节速度)VJ:与MOVJ相同。
V、VR、VE:与MOVL相同。
V=(控制点速度)VR=(姿态角速度)VE=(外部轴速度)使用例SPEED VJ=50.0010基本命令一览DX10010.2输入输出命令10-310.2输入输出命令DOUT功能ON/OFF外部输出信号。
添加项目OT#(〈输出号〉)、OGH#(〈输出组号〉)、OG#(〈输出组号〉)OGH#(xx)无奇偶性确认,只进行二进制指定。
1个点4个点(1个组)8个点(1个组)FINE精密使用例DOUT OT#(12)ONPULSE功能外部输出信号输出脉冲。
添加项目OT#(〈输出号〉)OGH#(〈输出组号〉)OG#(〈输出组号〉)1个点4个点(1个组)T=〈时间〉0.01~655.35秒若无指定,为0.30秒。
使用例PULSE OT#(10)T=0.60DIN功能把输入信号读入到变量中。
添加项目B〈变量号〉IN#(〈输入号〉)、IGH#(〈输入组号〉)、IG#(〈输入组号〉)、OT#(〈通用输出号〉)、OGH#(〈输出组号〉)、OG#(〈输出组号〉)、SIN#(〈专用输入号〉)、SOUT#(〈专用输出号〉)IGH#(xx)、OGH#(xx)无奇偶性确认、只指定二进制。
1个点4个点(1个组)8个点(1个组)1个点4个点(1个组)使用例DIN B016IN#(16)DIN B002IG#(2)WAIT功能当外部输入信号与指定状态达到一致前,始终处于待机状态。
添加项目IN#(输入号)IGH#(〈输入组号〉)、IG#(〈输入组号〉)、OT#(〈通用输出号〉)、OGH#(〈输出组号〉)、OG#(〈输出组号〉)、SIN#(〈专用输入号〉)、SOUT#(〈专用输出号〉)1个点4个点(1个组)8个点(1个组)1个点4个点(1个组)8个点(1个组)(状态)、B(变量号)T=(时间)0.01~655.35秒使用例WAIT IN#(12)=ON T=10.00WAIT IN#(12)=B002AOUT功能向通用模拟输出口输出设定电压值。
添加项目AO#(〈输出口号〉)1~40〈输出电压值〉-14.0~14.0使用例AOUT AO#(2)12.710基本命令一览DX10010.2输入输出命令10-4ARATION功能启动与速度匹配的模拟输出。
添加项目AO#(〈输出口号〉)1~40BV=〈基础电压〉-14.00~+14.00V=〈基础速度〉0.1~150.0mm/秒1~9000cm/分OFV=〈偏移电压〉-14.00~+14.00使用例ARATION AO#(1)BV=10.00V=200.0OFV=2.00 ARATIOF功能结束与速度匹配的模拟输出。
添加项目AO#(〈输出口号〉)1~40使用例ARATIOF AO#(1)10基本命令一览DX10010.3控制命令10-510.3控制命令JUMP功能向指定标号或程序跳转。
添加项目*〈标号字符串〉、JOB:〈程序名称〉、IG#(〈输入组号〉)、B〈变量号〉、I〈变量号〉、D〈变量号〉UF#(〈用户坐标号〉)IF语句使用例JUMP JOB:TEST1IF IN#(14)=OFF*(标号)功能显示跳转目的地添加项目〈跳转目的地〉半角8个字符以内使用例*123CALL功能调用指定程序。
添加项目JOB:(程序名称)、IG#(〈输入组号〉)、B〈变量号〉、I〈变量号〉、D〈变量号〉UF#(用户坐标号)IF语句使用例CALL JOB:TEST1IF IN#(24)=ONCALL IG#(2)(根据输入信号的结构调用程序。
此时,不能调用程序0。
RET功能从被调用程序返回调用程序。
添加项目IF语句使用例RET IF IN#(12)=OFFEND功能说明程序的结束添加项目无使用例ENDNOP功能不执行任何功能。
添加项目无使用例NOPTIMER功能只在指定时间停止。
添加项目T=〈时间〉0.01~655.35秒使用例TIMER T=12.50IF语句功能判断各种条件。
添加在其他进行处理的命令之后使用。
格式:〈比较要素1〉=、<>、<=、>=、<、>〈比较要素2〉添加项目〈比较要素1〉〈比较要素2〉使用例JUMP*12IF IN#(12)=OFFUNTIL语句功能在运动中判断输入条件。
添加在其他进行处理的命令之后使用。
添加项目IN#(〈输入号〉)〈状态〉使用例MOVL V=300UNTIL IN#(10)=ON10基本命令一览DX10010.3控制命令10-6PAUSE功能暂停。
添加项目IF语句使用例PAUSE IF IN#(12)=OFF’(注释)功能显示注释添加项目〈注释〉半角32个字符以内。
使用例’描述100mm正方形程序。
CWAIT功能等待执行下一行命令。
与不能是移动命令、带NWAIT标记的、配对使用。
添加项目无使用例MOVL V=100NWAITDOUT OT#(1)ONCWAITDOUT OT#(1)OFFMOVL V=100ADVINIT功能对预读命令进行初始化处理。
对变量数据的访问时间进行调整时使用。
添加项目无使用例ADVINITADVSTOP功能停止预读命令。
对变量数据的访问时间进行调整时使用。
添加项目无使用例ADVINIT10基本命令一览DX10010.4平移命令10-710.4平移命令SFTON功能启动平移动作。
添加项目P〈变量号〉、BP〈变量号〉、EX〈变量号〉BF、RF、TF、UF#(〈用户坐标号〉)、BF:基座坐标RF:机器人坐标TF:工具坐标UF:用户坐标使用例SFTON P001UF#(1)SFTOF功能停止平移动作。
添加项目无使用例SFTOF功能在指定坐标系,利用数据2和数据3的计算,得出平移量,存入数1。
格式:MSHIFT〈数据1〉〈坐标〉〈数据2〉〈数据3〉添加项目数据1PX〈变量号〉坐标BF、RF、TF、UF#(〈用户坐标号〉)、MTFBF:基座坐标RF:机器人坐标TF:工具坐标UF:用户坐标MTF:主动侧工具坐标数据2PX〈变量号〉数据3PX〈变量号〉使用例MISHIFT PX000RF PX001PX00210基本命令一览DX10010.5运算命令10-810.5运算命令ADD功能数据1与数据2相加,相加后的结果存入数据1。
格式:ADD〈数据1〉〈数据2〉添加项目数据1B〈变量号〉I〈变量号〉D〈变量号〉R〈变量号〉P〈变量号〉BP〈变量号〉EX〈变量号〉数据1经常为变量。
数据2常量B〈变量号〉I〈变量号〉D〈变量号〉R〈变量号〉P〈变量号〉BP〈变量号〉EX〈变量号〉使用例ADD I012I013SUB功能数据1与数据2相减,结果存入数据1。
格式:SUB〈数据1〉〈数据2〉添加项目数据1B〈变量号〉I〈变量号〉D〈变量号〉R〈变量号〉P〈变量号〉BP〈变量号〉EX〈变量号〉数据1常为变量。
数据2常数B〈变量号〉I〈变量号〉D〈变量号〉R〈变量号〉P〈变量号〉BP〈变量号〉EX〈变量号〉使用例SUB I012I013MUL功能数据1与数据2相乘,结果存入数据1。
格式:MUL〈数据1〉〈数据2〉数据1的位置变量可用元素指定。
Pxxx(0):所有轴数据Pxxx(1):X轴数据Pxxx(2):Y轴数据Pxxx(3):Z轴数据Pxxx(4):Tx轴数据Pxxx(5):Ty轴数据Pxxx(6):Tz轴数据添加项目数据1B〈变量号〉I〈变量号〉D〈变量号〉R〈变量号〉P〈变量号〉(〈元素号〉)BP〈变量号〉(〈元素号〉)EX〈变量号〉(〈元素号〉)数据1常为变量。
数据2常量B〈变量号〉I〈变量号〉D〈变量号〉R〈变量号〉使用例MUL I012I013MUL P000(3)2(用2乘以Z轴数据的命令)10基本命令一览DX10010.5运算命令10-9DIV功能用数据2除以数据1,差存入数据1。