关于床椅一体化护理床抬背机构运动分析与滑移补偿探讨
多功能护理床的机构设计与动力学分析
胡绍忠 洪 云
( 新余学院,新余 338031)
摘 要 设计了一种能够实现左右侧翻、床上排便等多功能医疗护理床。并以护理床为研究对象,用 ADAMS 进行建模,分析
了翻板上的作用力、接触副的摩擦系数以及翻板的空间位置对电机转矩的影响。通过对床体主要机构的建模及动力学分析,
计算出转矩的变化曲线图,找出对转矩大小有影响的三个因素,对于选择电机及安装结构有重要的指导作用。
第 12 卷 第 36 期 2012 年 12 月 1671—1815( 2012) 36-9937-05
生物科学
科学技术与工程
Science Technology and Engineering
Vol. 12 No. 36 Dec. 2012 2012 Sci. Tech. Engrg.
多功能护理床的机构设计与动力学分析
1 机构设计
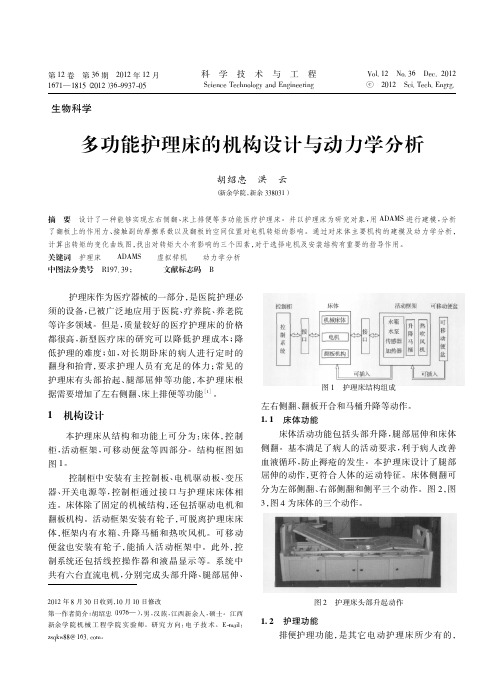
本护理床从结构和功能上可分为: 床体,控制 柜,活动框 架,可 移 动 便 盆 等 四 部 分。 结 构 框 图 如 图 1。
控制柜中安装有主控制板、电机驱动板、变压 器、开关电 源 等,控 制 柜 通 过 接 口 与 护 理 床 床 体 相 连。床体除了固定的机械结构,还包括驱动电机和 翻板机构。活动框架安装有轮子,可脱离护理床床 体,框架内 有 水 箱、升 降 马 桶 和 热 吹 风 机。 可 移 动 便盆也安 装 有 轮 子,能 插 入 活 动 框 架 中。 此 外,控 制系统还包括线控操作器和液晶显示等。系统中 共有六台直流电机,分别完成头部升降、腿部屈伸、
多功能护理床机构设计及仿真

多功能护理床机构设计及仿真作者:冯健包仁人来源:《中国新技术新产品》2019年第06期对护理床的抬背机构建造模型,然后利用软件MATLAB对抬背运动状态进行仿真。
通过力学理论进行力学计算,分析床板在运动状态下的角速度,角加速度及背部摩擦力对患者舒适度的影响,仿真得出的结果满足了设计需求,验证了方案可行性。
关键词:护理床;抬背机构;仿真中图分类号:TH132 文献标志码:A0 引言随着老龄人口和无法自理人士的持续增加,护理问题逐渐突出,特别近几年来由于床位的不足和护理人士的不够,使得人们对医疗护理类产品的需求也越来越大。
在我国,由于技术水平起步晚,护理床的普及率和技术水平相比发达国家还存在一定差距,目前国内市场上的护理床较多,但普遍关注功能型,舒适性的护理床还是比较少,抬背机构作为护理床的最主要功能之一,可以帮助长期卧床的老人和患者改变坐姿,以防止关节坏死及肌肉萎缩。
该公司已经研发了一种护理床,对抬背机构重新设计,提供了一种更符合人体工程学的抬背方式。
通过对抬背机构的建模及运动学仿真,提高了机构运动性能,为护理床的研发提供验证了设计的可行性,保证了机构运动的安全性及舒适性。
1 抬背机构的设计分析护理床的抬背机构简图如图1所示,该机构由多连杆和一个电动推杆驱动,为八杆单自由度平面机构。
选取滑块作为原动构件,即可确定机构运动的仿真。
该抬背机构可以弥补传统抬背方式的背压感。
抬背时,病人背部会有一定程度地上升,背板逆时针转动的同时也会向上抬起,即背板有一个左上方運动趋势,这样抵消了背部相对抬背板向下的滑移,减轻了病人背部相对于背板的摩擦力,使病人的背部更加舒适,不再具有压迫感,更符合人体工程学。
2 运动模型的建立3 运动学仿真在MATLAB软件中进行编程绘制机构的运动参数图,电动推杆根据负载不同,推进速度也不同,这里把推杆看作匀速运动,取速度V=15 mm/s,DA=368 mm,CA=54 mm,EF=550 mm,DA的运动范围在283°~352°,θ1+θ2+2°图2为杆DF的角速度图。
床椅分离式多功能护理床的抬背机构设计及其仿真

床椅分离式多功能护理床的抬背机构设计及其仿真张华;寇元金;刘继忠;祝顺风【摘要】A carry back mechanism of detachable multifunctional nursing bed was designed and accomplished the simulation analysis. Based on the function and overall layout requirements,a suitable scheme was selectedfor the carry back mechanism and using SOLIDWORKS software built institutions model. On the basis of mechanical principle knowledg calculated for institutions motion,then chosen the suitable way of driving,using MATLAB soft-ware simulated the motion state of mechanism,simulation results basically were achieved the expected design re-quirements,which has verified the feasibility of the design.%设计了一种床椅分离式多功能护理床的抬背机构并对其仿真分析。
基于可分离式护理床所需功能及整体布局要求,选择合适的抬背机构方案,运用SOLIDWORKS软件建立起了机构的模型。
运用机械原理知识对机构进行了运动计算,选择了合适的驱动方式,采用MATLAB软件编程对机构的运动进行了仿真,仿真结果基本达到了预期的设计要求,验证了该机构设计方案的可行性。
多功能床椅一体化助老机器人机械系统设计与实现
多功能床椅一体化助老机器人机械系统设计与实现
董绪斌;刘晓飞;周小龙;罗春阳;李建永
【期刊名称】《北华大学学报:自然科学版》
【年(卷),期】2022(23)1
【摘要】提出一款操作简便、功能丰富的床椅一体化助老机器人,对机械系统进行设计与实现.根据老年人实际需求规划机器人总体结构及主要机构.为满足实际应用需要,对关键机构及零件进行运动学分析和有限元分析,从理论上验证设计的可行性;详细设计各模块机械结构,完成样机搭建与调试,并优化关键机构,验证该助老机器人机械系统的可靠性和实用性.研究结果可为床椅一体化助老机器人研发提供技术基础与开发平台,为实现多功能助老服务机器人集成化、实用化提供有效解决途径.【总页数】7页(P126-132)
【作者】董绪斌;刘晓飞;周小龙;罗春阳;李建永
【作者单位】北华大学机械工程学院
【正文语种】中文
【中图分类】TP242
【相关文献】
1.多功能一体化床椅
2.床椅一体化多功能护理床——实现卧床老人生活自理的梦想
3.新型智能床椅一体化机器人设计
4.4WD-4WS型床椅一体化机器人室内定位与点镇定控制研究
5.4WD-4WS型床椅一体化机器人室内定位与点镇定控制研究
因版权原因,仅展示原文概要,查看原文内容请购买。
床椅一体化多功能护理床_实现卧床老人生活自理的梦想_胡木华

图 6 大小便处理过程
d) 具有网络信息交互的系统:实现吃药提醒、远程视 频交流以及生理参数监控检测功能。
图 7 网络信息交互系统
3.5 特色与技术创新 a) 床椅一体化设计创意: 床椅互换,有效解决了卧床人士在床和轮椅之间自理 转换的难题;e-Bed A 在设计中,集成了如厕模块,解决 了老人由于生理机能退化行动困难、如厕不便等问题。在 原始状态下,e-Bed 以护理床的形式存在;当需要出行时, 一键操作便可实现床体向电动轮椅的转换,并轻松出行; 当需要如厕时,同样是一键操作便可实现。 b) 床椅分离与自动对接技术:
3.3 适用人群 a) 面向卧床的老年人:自理或半自理解决褥疮翻身、 大小便自理、精神孤寂等问题。 b) 行动不便的住院病人:自主控制床椅分离、去卫生 间大小便自理等。 c) 下肢瘫痪的残疾人:从卧床状态转移至移动器具, 如轮椅上时,必须有护理人员的抱起搬动,而且转移时还 有跌落的危险。该系统不需要在人床与椅之间的变动,通 过自动进行床椅转换来实现,扩大了残疾人的活动范围, 提高其生活自理能力,减轻了护理人员的劳动强度。 3.4 功能特点 a) 具有抬背、曲腿和翻身的多功能护理床基本功能。
全自动多功能护理床椅的设计

工业技术科技创新导报 Science and Technology Innovation Herald68DOI:10.16660/ki.1674-098X.2020.16.068全自动多功能护理床椅的设计①张宇1 俞成涛1* 张 倩1 陈赛1 金子陵1 张铭辉1 孙月梅2(1. 江苏理工学院机械工程学院 江苏常州 213000;2.江苏理工学院数理学院 江苏常州 213000)摘 要:为了缓解护理行业巨大的工作压力以及解决市场上护理床椅的缺陷,本项目设计了一种能够适应不同需求可自动改变宽度的全自动多功能护理床椅。
本文分析了护理床椅的工作原理以及可实现的功能,运用了Solidworks对主要机构进行了机构设计。
结果表明该护理床椅各个机构运动平稳,实现了设计目标。
本护理床椅与市场上普通产品相比,其实用性更强,应用范围更广,可用于医用和家用。
关键词:护理床椅 调节宽度 稳定支撑中图分类号:TH772 文献标识码:A 文章编号:1674-098X(2020)06(a)-0068-02①基金项目:江苏省重点研发计划-社会发展面上项目( 项目名称:基于智能机器人技术的失能老人护理与康复系统的研究;项目编号:BE2018641);江苏省高等学校大学生创新创业训练计划项目(项目名称:床椅互变的护 理床计;项目编号:201911463002Z)。
作者简介:张宇(2000,1—),男,汉族,江苏宿迁人,本科,研究方向:机械设计制造及其自动化。
通讯作者:俞成涛(1987,11—),男,汉族,安徽六安人,博士研究生,讲师,主要从事医疗器械设计研究以及磁悬浮技 术研究工作,E-mial:*************.cn。
国家统计局发布的2018年数据显示,截至2018年年底,我国60周岁及以上人口24949万人,占总人口的17.9%;其中,我国65岁及以上人口比重达到11.9%[1]。
预计2019—2059年65岁及以上老年人口将由目前的1.8亿左右增加到 2059年4亿左右的峰值[2]。
防扯背的病床起坐机构

・ 1 4 9 ・
防扯背 的病床起坐机构
李 洪洲 张永超 张 坤 吴俊星 卢 杰 李泽彪 ( 北华大 学机械工程学院 , 吉林 吉林 1 3 2 0 2 1 )
摘 要: 在现有康 复床 的起 坐与下躺过程 中, 由于靠背板 角度 的变化 , 康复床 的靠背板 与患者背部存在一 个相 对位移 , 因此会产生一 个与患者背部移动方向相反的摩擦 力 , 对 患者背部的衣服进行扯拽 , 使患者( 特别是不能 自理者 ) 有潜在的危险。针对该 问题 , 研发 了一种 防扯 背的康复床起坐机构 , 通过补偿 靠背板 与患者背部之 间的位移 , 有效的避免 了患者在起 坐过程 中的扯背现象。 关键词 : 起 坐; 扯 背现 象; 康复床
基 金 项 目: 吉林 省科 技 发 展 计 划 项 目: 2 0 1 4 0 2者 : 卢杰( 1 9 6 2 一) , 男, 教授 , 研 究方向: 医疗器械研发。
1 起 坐 机构 工作 原 理 据统计 , 我 国现有老年人 口 1 . 3 2亿 ,并 每年 以 3 . 2 %的速 度增 加, 8 0岁 以上 的高龄老人每年 以 5 %的速度 增长 , 而全 国卧床 、 生活 该起坐机构 主要 由靠 背板 导轨副 1 、 靠背板 2 、 1 号钢 丝绳 3 、 丝 不能 自理 的病人 和老人有 2 , 7 0 0万 , 半身不遂病人有 7 0万人 , 8 2万 杠 4 、 配重 5 、 丝母 6 、 电机 7 、 配重导 轨副 8 、 起坐 外框 9 、 起 坐横架 老年痴呆病人 中有 3 0 %, 总计 2 4万人卧床不起 , 老龄化 问题 已上升 l 0 、 滑轮 1 1 、 力 传递块 1 2 、 拉压力传感器 1 3 、 铰链 1 4 、 行程开关 1 5 、 到事关 国计 民生 的大事l 】 / 。 目前国 内外现有产品在起坐 以及躺 下过 起坐杆 1 6 和床体 l 7 组成 , 如图 1 所示 。 程中, 病人 背部都会有 明显 的拉扯感 , 需要 护理人员帮 助病人重新 工作 时 , 起 坐杆伸 出 , 起 坐杆 的作用力 使该起坐 装置整体 绕铰 调整姿态 , 增 大了护 理强度 。为此研制 了一种 自适应调节靠背 的起 链逆 时针转 动 , 转 动过程 中, 因为人体背部 与靠 背板之间存在 相对 坐机构 。 位移 , 所 以靠背板 与人 体背部会产生一个 向下的摩擦 力 , 此摩擦 力 通过与靠背板固联 的力传递块传递 给拉压力传感器 , 当拉压力传感 器受到的力值达 到设定初值时 , 拉压力传感器通过控制系通过统将 信号传 递给电机 , 电机带动丝杠转动 , 因为丝杠与丝母相配合 , 丝母 与靠背板 固联 , 因此 电机的 的动力能传递 给靠背板 , 使靠背板 沿人 体背部移动方 向进行运动 ,补偿人体 背部 与靠背板 之间 的相对位 移, 使 靠背板与人体背部 的摩擦力减小 , 当拉压力传感 器检测 的拉 压力值小于设定初值 时, 电机停止。下躺过程为起坐过程的逆向过 程, 原理与起坐过程一致 。 本起 坐机构设置 了一个配重 , 该配重为长 方体板类件 ,两边设 置接 口通过绳子 与靠 背板上下 两侧 的接 口相 连, 形成闭环连接。配重的重量等于靠 背与所有 与靠 背装 配零 件之 和。设 置配重是为 了平衡靠背 以及所有与靠背装配零件的重量 , 以 保 证拉压力传感器 收到的力信号为单纯 的靠背板与背部 之间 的摩 擦力, 保证了起坐机构靠 背板运动 的准确性。 在起坐过程 中 , 靠 背板 会 随着人体 的移动而移动 ,不会使人在起坐过程 中体会到拉扯感 , 避免 了靠背板搓拉背部 , 从 而避免压迫心脏 ; 挤压脊椎 和臀部 ; 以及 挤 压腿部骨胳 。 2 结 论
基于人体工程学的多功能护理床抬背机构的三维模型仿真设计

基于人体工程学的多功能护理床抬背机构的三维模型仿真设计作者:王学龙来源:《科技视界》2018年第11期【摘要】本篇文章针对护理床的抬背机构,基于人体工程学提出了三种不同的方式来实现,并对其进行比较分析,从而选择出功能最为完善,且应用性最好的机构。
在进行多功能护理床抬背机构设计时,首先对其预期功能进行了补充和完善,并在三维软件中建立了相关模型,完成了技术可行性分析,同时根据机械设计和机械原理来实现关键参数的采集和计算,利用 MATLAB来进行机构的运动仿真,确定了机构的运行方式,为进一步分析打下了坚实的基础。
【关键词】人体工程学;多功能;护理床;抬背机构;仿真中图分类号: TS664.01 文献标识码: A 文章编号: 2095-2457(2018)11-0015-002DOI:10.19694/ki.issn2095-2457.2018.11.005【Abstract】Targeting the back-lifting mechanism of nursing beds, in this paper, the author proposed three different methods on the basis of ergonomics and analyzed the methods through comparison, thus selecting the mechanism with the most complete functions and the best practicability. Upon design of the back-lifting mechanism of a multifunctional nursing bed, the author first supplemented and improved its intended functions, and established relevant models in the 3D software to complete technical feasibility analysis; in the meantime, the author realized the collection and calculation of key parameters in accordance with mechanical design and principles of machinery. Using MATLAB for motion simulation of the mechanism, the author further determined the operation mode of the mechanism, laying down a solid foundation for the next analysis.【Key words】Ergonomics; Multifunctional; Nursing Bed; Back-lifting Mechanism;Simulation0 引言随着社会经济的不断发展和人民生活水平的显著提高,我国平均寿命较十年前已有了明显的增长,但生活成本以及教育成本的不断提升使得人口出生率呈现逐年下降的态势,低出生率和严重的人口老龄化现象是我国当前所面临的主要社会问题之一。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
关于床椅一体化护理床抬背机构运动分
析与滑移补偿探讨
摘要:伴随着科技的进步和发展,人们对智能多功能护理床的要求也越来越高,在追求其舒适性的基础上,更加看重其实用性。
基于此,人们设计并研发了
一种多功能的床椅一体化护理床。
为了对此机构进行简化,避免其受到抬背机构
和床椅机构的影响,对传统的电动推杆进行了改进。
本文借助人机工程仿真软件,对床椅一体化护理床抬背机构的运动情况及滑移补偿情况进行了分析,具体内容
如下。
关键词:护理床;抬背机构;滑移机构;人机工程学
近年来,智能设备被越来越多的运用到医疗行业和服务领域中来,其中智能
护理为人们带来便利的同时,也进一步改善着其生活质量。
智能化装备在护理过
程中的有效应用,可极大的减轻护理人员的工作量,缓解其心理压力,降低社会
及家庭的负担,且有助于病人的生活自理。
当前,护理床的功能愈加完善,为了
进一步提升其舒适度,本文对多功能护理床展开了创新研究,并详细分析了抬背
机构和滑移补偿机构的重要作用。
1.抬背机构运动分析
1.1转角式抬背机构分析
在对多功能护理床的抬背动作进行模拟时,可采用西门子人机工程仿真软件
进行,抬背时,人体髋关节的旋转中心,并不重合于护理床机构的旋转中心,从
而导致其压力重心出现了滑移。
在抬背过程中,其转矩跟随人体抬背角度的一起
改变。
如图1,对运动模型进行简化分析,T为驱动抬背的总转矩,将其分为T
1
和T
2,其分别为驱动背板和驱动人体上半身运动的转矩,r
1
和r
2
分别为背板重心
距离旋转轴旋转中心的长度及人体上半身重心距离髋骨旋转中心的长度,抬背速度为ω。
图1抬背结构简图
1.2背部滑移分析
在发生背板翻转动作时,背部改变平躺姿态为坐姿,人体背部与背板表面会
发生相对滑移,方向为自下至上,相反,当背板改变坐姿为平躺时,人体背部与
背板表面的相对位移方向则会是自上而下。
这种情况对于身体健康的人,则可在
自身腰腹力量的作用下进行调整,而对于年老体弱残者,由于缺乏较强的腰腹力量,很难自行改变,且滑移情况会打乱其睡衣或床单的整洁性,从而使局部压迫
感加重,在无护工帮助的情况下,将对病人的休息质量产生干扰。
因此,为进一步了解滑移的影响,本文分析了滑移量的变化情况。
为确保数
据真实可信,根据人体工程学,创建了抬背仿真运动模型,并参考我国成年人人
体主要尺寸,对抬背动作进行了描述和修正。
最终得出,仿真曲线与实测值基本
一致。
2.背板滑移补偿方案
2.1旋转中心重合法
之所以出现相对滑移,是因为人体与床背板具有不相重合的旋转中心,因此,为了消除相对滑移,需采取措施,使二者的旋转中心重合。
为确保背板与人体背
部相对静止,且不妨碍其抬背动作,需改进抬背机构,改变铰链连接方式,确保
在完成抬背运动的过程中,背板与人体背部以人体髋骨为旋转中心。
为此,需采
取以下两种措施,一是将旋转机构改变,执行抬背动作时,改变以往围绕背板与
座板的铰链处进行旋转的方式,将髋骨中心作为旋转轴。
二是使背板保持原来的
铰接旋转方式,采取浮动式方案,设计背板的上表面和背部接触部分,当抬背时,
浮动背板可跟随人体背部的运动情况,随之在一定范围内进行旋转,顺应人体位
姿的变化情况,为确保背板与人体背部处于相对静止,需借助弹性装置,将背板
上表面活动板与抬背机构进行连接。
当进行抬背活动时,浮动背板可在弹簧的弹
性变化范围内,随着人体背部的旋转情况,实时调整自身位姿,从而与人体保持
相对静止。
为完善该方案,需有效控制弹簧弹性模量,避免其过大或过小。
2.2主动补偿法
主动补偿法又称有动力补偿法,即将一层滑动背部添加到原来的背板上,借
助伺服电机
的力矩,对滑动背板进行控制,使其与人体背部的运动情况相一致,避免人
体出现相对位移。
具体操作为将行程为150mm的丝杠滑轨机构,加入到背板与滑
动背板之间,对抬背的角度数据进行收集,并将其作为滑动机构的输入信号,处
理后,转换丝杠滑轨的运动状态,使其转变为滑动背板的直线滑移运动。
在实施
该方案时,需针对抬背运动和背板滑移运动,采取两个独立的动力控制系统,其
难点为两组运动很难保持同步,需严格设计控制系统及信号采集情况,而且间断
抬背和反复启停现象会严重影响该过程,从而无法掌控其补偿精度。
2.3被动补偿法
被动补偿又称为无动力补偿法,类似于主动补偿法,其采用的滑移补偿方式
同样是借助一块固定板和滑动背板,不同点则是该方法不需伺服控制系统,可根
据抬背旋转情况,遵循背板滑移运动规律,设置出一套相应的凸轮传动机构。
为
确保滑移运动与抬背运动同时进行,可根据抬背旋转角度的变化,对滑移距离进
行控制。
该方案在实施时,可通过抬背的旋转运动与直线运动的相互转换来进行,且不受系统反复启停的影响。
3.结语
综上,改进和创新抬背机构,具有较大的现实意义和理想价值,可改善传统
机构在功能复合过程中的弊端,且可作为依据,供未来设计和改进护理床进行参考。
此外,结合对背板滑移的探讨及设计的补偿方案,可极大的提升用户的舒适
程度。
而且西门子JACK人机工程仿真软件的运用,进一步彰显了其设计的人性化。
此外,根据人机工程学创建机构运动模型,进而展开对抬背机构的运动分析,可作为参考依据,为该方案提供支持,进而推动对护理床的开发研究进程。
参考文献
[1]王学龙. 基于人体工程学的多功能护理床抬背机构的三维模型仿真设计[J]. 科技视界, 2018(11):15-16.
[2]秦帅华, 赵新华, 杨玉维,等. 多功能护理床起背机构创新设计及运动分
析[J]. 天津理工大学学报, 2018, 034(002):1-5,11.
[3]胡木华, 刘静华, 陈殿生,等. 床椅一体化多功能护理床——实现卧床老
人生活自理的梦想[J]. 机器人技术与应用, 2017(02):46-50.
作者简介:宋明玺(1999-02-19),男,汉族,籍贯:青海省海东市互助县,学历:本科在读。