腿式支撑容器支腿的受力分析
压力容器设计-零部件及分析设计
1、不洁净或粘性介质,易使安全阀堵塞,或使阀瓣和阀座粘结。 2、由于化学反应使容器内压力急剧增大,安全阀不能及时泄压。 3、介质为剧毒或昂贵气体,安全阀不能满足防泄漏要求。 4、腐蚀性大的介质,安全阀采用防腐材料成本高。
分类
?拉伸型
按破坏时的受力形式
??压缩型 ??弯曲型
??剪切型
?正拱型 按产品外观 ??反拱型
2、对温度的敏 感性小。
3、易受振动而 发生泄漏。
弹簧式安全阀的特点
1、结构紧凑,灵敏度高。 2、对振动不敏感。 3、高温下弹簧发生应力松
弛,弹簧力下降。
选用安全阀的基本原则—P184
爆破膜 ——断裂型的安全泄放装置
特点
1、密封性能好,能完全防止介质泄漏。 2、破裂速度快,泄压反应迅速。
适用场合
2、焊接接头应尽量避开高应力区
3、尽量降低焊件刚度
焊接结构设计原则
1、尽量采用对接接头 2、尽量采用全焊透结构 3、尽量减小焊缝处的应力集中 4、便于进行无损检验
§4-4
分 析 设 计
一、分析设计和常规设计的比较
常规设计的局限性
(1)常规设计将Байду номын сангаас器承受的“最大载荷”按一次 施加的静载荷处理,不涉及容器的疲劳寿命问题, 不考虑热应力。
③将各类应力按同种分量分别叠加,得到Pm 、PL 、PL + Pb和 PL+ Pb十Q共四组应力分量,每组一般有6个。
④由每组6个应力分量,计算各自的主应力σ1 、σ2和σ3 ,取 σ1 > σ2 > σ3 。
⑤计算每组的最大主应力差: σ13= σ1 - σ3 各组的 σ13即为与Pm 、PL 、PL + Pb和PL+ Pb十Q相对应的应力强度SⅠ、SⅡ 、SⅢ和 SⅣ。
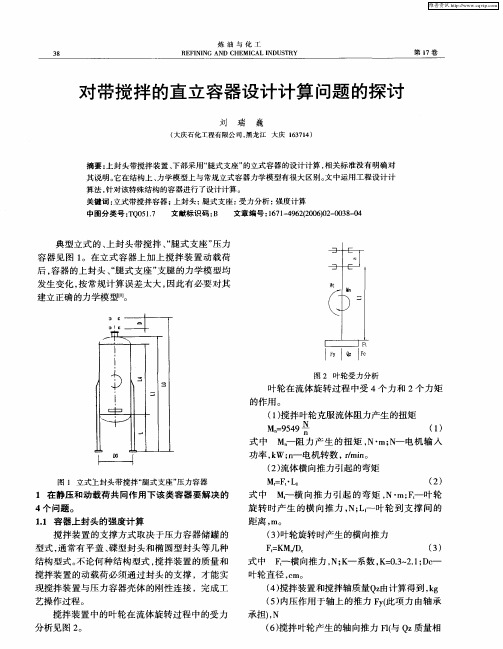
对带搅拌的直立容器设计计算问题的探讨
卜 ——— —— — —— —
D 0
f
功 率 ,w;一 电机 转数 ,/i。 k n r n m
() 2 流体横向推力引起的弯矩
图 1 立 式 上 封 头带 搅拌 “ 式 支 座 ” 力 容 器 腿 压
Mt l . = ・ FL
() 2
1 在 静 压和 动载 荷共 同作用 下该 类 容器 要解 决 的 4个 问题 。 11 容 器上 封 头的 强度计 算 .
( ) 拌 装置 和搅 拌轴质 量 Q E计 算得 到 , 4搅 zh
() 5 内压作 用 于轴 上 的推 力 F ( 项力 由轴 承 v此 承担1N ,
搅 拌 装 置 中 的叶 轮在 流 体旋 转 过 程 中 的受力
分析见 图 2 。
() 6 搅拌 叶轮 产 生 的轴 向推力 n( Q 质量相 与 z
—
× —
10 00 1
D
D
+ 47 l .)
( 4)
式中
T 封 头 壁 厚 , m; 一搅 拌 罐 直 径 , m; _器 壳 体 连 接 法 兰 直 径 , m; 广 e Q 搅 拌 装 置质 量 ,g M广 搅拌 器 在 流体 旋 转 中 一 k; 产生 的弯 矩 , m。 N・ 采 用 ( )式 计 算 封 头 壁 厚 后 ,再 分 别 用 4 G 5 —9 8 钢 制 压 力 容器 》 B10 19 ( 封头 一 节 进 行 核算 , 最 终厚 度取 二者 计算 结果 较大 值 。 1 支腿 的强度 计算 . 2 无 动 载荷 时 ,支 腿 的计 算 一般 根 据 容器 最 大
中图 分 类 号 :Q 5 . T 01 7 文献 标 识 码 : B 文 章 编 号 :6 1 4 6 (060 -0 8 0 17 - 9 22 0 )2 0 3 - 4
储罐支腿强度计算公式
储罐支腿强度计算公式储罐是工业生产中常见的设备,用于储存液体或气体等物质。
储罐的支撑结构是其重要的组成部分,支腿的强度计算是保证储罐安全运行的重要环节。
支腿的强度计算公式是根据储罐的设计要求和实际工作条件来确定的,下面将介绍储罐支腿强度计算公式的相关知识。
1. 支腿强度计算的重要性。
储罐的支腿是支撑储罐本体的重要组成部分,其强度计算直接关系到储罐的安全运行。
如果支腿强度不足,可能会导致储罐倾覆或支撑结构破坏,造成严重的安全事故。
因此,进行支腿强度计算是确保储罐安全运行的重要环节。
2. 支腿强度计算的基本原理。
支腿强度计算是根据储罐的设计要求和实际工作条件来确定的。
通常情况下,支腿强度计算需要考虑以下几个方面的因素:(1)储罐的设计要求,包括储罐的容积、工作压力、工作温度等参数。
(2)支腿的材料和结构,支腿的材料和结构对其强度有重要影响,需要根据实际情况进行选择和设计。
(3)工作条件,包括储罐的使用环境、外部载荷、地震等因素。
基于以上因素,支腿强度计算公式需要综合考虑储罐的设计要求和实际工作条件,以确保支腿的强度满足要求。
3. 支腿强度计算公式的相关知识。
支腿强度计算公式是根据储罐的设计要求和实际工作条件来确定的,通常情况下需要考虑以下几个方面的因素:(1)支腿的受力情况,支腿在实际工作中会受到垂直载荷、水平载荷、弯矩等多种受力情况,需要根据实际情况确定支腿的受力情况。
(2)支腿的强度设计,根据支腿的受力情况和材料特性,确定支腿的强度设计参数,包括截面尺寸、材料强度等。
(3)支腿的强度计算公式,根据支腿的受力情况和强度设计参数,确定支腿的强度计算公式,通常情况下包括静力强度计算和动力强度计算两个方面。
静力强度计算通常采用静力平衡方程和材料强度理论,确定支腿在静态载荷作用下的强度。
动力强度计算通常采用动力学方程和振动理论,确定支腿在动态载荷作用下的强度。
4. 支腿强度计算公式的应用。
支腿强度计算公式的应用需要根据具体的储罐设计要求和实际工作条件来确定。
最新容器支腿计算公式(支腿计算主要用于立式容器的支腿受力及地脚螺栓计算)[表格]
![最新容器支腿计算公式(支腿计算主要用于立式容器的支腿受力及地脚螺栓计算)[表格]](https://img.taocdn.com/s3/m/679ee3732f60ddccdb38a025.png)
0.09
底板计算厚 度,δb (mm) =a0(3B/[σ])
0.5
6337.19
地脚螺栓根 径 db (mm)
8.04
σB≤[σ]
0.00
τ≤[τ]
1.47
支腿与壳体 焊角高 (mm)
底板厚度 (mm)
支腿与底板 焊角高 (mm) 风压高度变 化系数 fi 风振系数k2 基本振型参 与数ηk1 地震设防烈 度αmax
设备附加垂 直载荷 Fv'(N)(向下 为正)
5911.47
Q235A 3836 23300
3 2225 HK240C 242880000
输入数据 筒体长度H(mm)
设备外径Do(mm)
设备质量W(kg) 支腿底板到设备 重心距离h(mm) 底板到支腿与壳 体焊接 支腿类型
支腿周向截面 的惯性矩x I1(mm4)
支腿截面积 AT(mm2)
壳体外壁到支腿 重心处的距离 e(mm)
支腿的弹性模量 E(MPa)
支腿材料的许用 拉弯 应力[σ]b,MPa
1.52 0.03 6545.57 0.10
0.40 8160.96 6337.19
34.82 1.53 11.42 合格 合格 合格
最大压应 力,B(Mpa)=FY/a1* a2
最大拉应力 四、地脚螺栓计 算结果
地脚螺栓反 力,FL(N)=
单根地脚螺栓受 拉应力σ B(Mpa)=FL/(nb*A b) 地脚螺栓剪力 τ (Mpa)=[Q-μ *W/n]/nb*Ab 五、支腿焊缝强 度评定结果:
支架支腿受力计算公式
支架支腿受力计算公式支架是一种常见的结构,用于支撑和固定其他结构或设备。
在支架设计中,支腿的受力计算是非常重要的一部分,它直接影响到支架的稳定性和安全性。
支腿的受力计算公式是支架设计中的关键内容,本文将介绍支架支腿受力计算的公式及其应用。
支架支腿受力计算的基本原理是力的平衡和力的分析。
在支架受力计算中,通常会考虑支架的自重、外部荷载以及支架的结构特点等因素。
支架支腿受力计算的公式可以分为静力平衡方法和有限元分析方法两种。
静力平衡方法是支架支腿受力计算的常用方法之一。
在这种方法中,支架的受力平衡可以通过受力分析和力的平衡方程来求解。
支架支腿受力计算的基本公式包括支腿的受力分析、支腿的受力平衡方程和支腿的受力计算公式等内容。
支腿的受力分析是指根据支架的结构特点和外部荷载的作用,确定支腿所受的力的大小和方向。
支腿的受力平衡方程是指根据支腿所受的外部荷载和支架的结构特点,建立支腿的受力平衡方程。
支腿的受力计算公式是指根据支腿的受力平衡方程,求解支腿所受的力的大小和方向。
有限元分析方法是支架支腿受力计算的另一种常用方法。
在这种方法中,支架的受力平衡可以通过有限元分析软件来求解。
有限元分析方法的基本原理是将支架的结构分割成有限个小单元,然后通过数值计算方法来求解支腿的受力情况。
有限元分析方法的优点是可以考虑支架的结构复杂性和非线性效应,但是需要借助专业软件进行计算。
在支架支腿受力计算中,常用的公式包括支腿的受力计算公式、支腿的受力平衡方程、支腿的受力分析公式等。
支腿的受力计算公式是根据支腿的结构特点和外部荷载的作用,确定支腿所受的力的大小和方向。
支腿的受力平衡方程是根据支腿所受的外部荷载和支架的结构特点,建立支腿的受力平衡方程。
支腿的受力分析公式是根据支腿的受力平衡方程,求解支腿所受的力的大小和方向。
在实际工程中,支架支腿受力计算的公式可以根据具体的支架结构和外部荷载情况进行调整和修正。
同时,支架支腿受力计算的公式还需要考虑支架的使用环境和安全要求等因素。
容器支座介绍

容器支座介绍一、卧式容器的支座卧式容器的支座有三种:鞍座、圈座和支腿。
㈠鞍式支座鞍座是应用最广泛的一种卧式容器支座,常见的卧式容器和大型卧式贮槽,热交换器等多采用这种支座。
鞍式支座如上图所示,为了简化设计计算,鞍式支座已有标准JB/T4712-92 《鞍式支座》,设计时可根据容器的公称直径和容器的重量选用标准中的规格。
鞍座是由横向筋板、若干轴向筋板和底板焊接而成。
在与设备连接处,有带加强垫板和不带加强垫板两种结构。
鞍式支座的鞍座包角q为120°或150°,以保证容器在支座上安放稳定。
鞍座的高度有200、300、400和500mm四种规格,但可以根据需要改变,改变后应作强度校核。
鞍式支座的宽度b可根据容器的公称直径查出。
鞍座分为A型(轻型)和B型(重型)两类,其中重型又分为BⅠ~BⅤ五种型号。
其中BⅠ型结构如BⅠ型鞍座结构图所示。
A型和B型的区别在于筋板和底板、垫板等尺寸不同或数量不同。
BI型鞍座结构图鞍座的底板尺寸应保证基础的水泥面不被压坏。
根据底板上螺栓孔形状的不同,每种型式的鞍座又分为固定式支座(代号F)和滑动式支座(代号S)两种安装形式,固定式鞍座底板上开圆形螺栓孔,滑动式支座开长圆形螺栓孔。
在一台容器上,两个总是配对使用。
在安装活动支座时,地脚螺栓采用两个螺母。
第一个螺母拧紧后倒退一圈,然后用第二个螺母锁紧,这样可以保证设备在温度变化时,鞍座能在基础面上自由滑动。
长圆孔的长度须根据设备的温差伸缩量进行校核。
一台卧式容器的鞍式支座,一般情况下不宜多于两个。
因为鞍座水平高度的微小差异都会造成各支座间的受力不均,从而引起筒壁内的附加应力。
采用双鞍座时,鞍座与筒体端部的距离A可按下述原则确定(见上图):当筒体的L/D较大,且鞍座所在平面内又无加强圈时,应尽量利用封头对支座处筒体的加强作用,取A≤0.25D;当筒体的L/D较小,d/D较大,或鞍座所在平面内有加强圈时,取A≤0.2L。
支腿
支腿-裙座的区别支腿-裙座的区别裙座应该是从承重量和受力以及稳定性上都要好于支腿,一般用于塔器或者比较大、重的立式容器。
支腿相对来说只能用于直径小重量轻的设备,支腿首选标准JB/T4713-92(不知道新标准是否开始执行)。
裙座要通过计算校核的细高形的塔器,较大且重的立式容器,一般都采用裙座。
它可承受较大的风载;设备和裙座的连接呈环状,应力均匀,稳定性好,连接可靠。
制作、安装较支腿难点。
一.支座设备支座用来支承设备重量和固定设备的位置。
支座一般分为立式设备支座、卧式设备支座和球形容器支座。
立式设备支座分为悬挂式支座、支承式支座、腿式支座和裙式支座四种。
卧式设备支座分为鞍式支座、圈式支座和支腿三种。
球形容器支座分为柱式、裙式、半埋式、高架式支座四种。
1.悬挂式支座(JB/T4725-92)悬挂式支座又称耳座,一般由两块筋板及一块底版焊接而成。
耳座的优点是简单,轻便;缺点是对器壁易产生较大的局部应力。
●耳座适用范围(JB/T4725-92):适用于公称直径不大于4000mm的立式圆筒形容器。
●耳座数量一般应采用四个均布,但容器直径小于等于700mm时,支座数量允许采用2个。
●耳式支座标准中分为A、AN(不带垫板),B、BN(带垫板)四种; A、AN型用于一般立式设备,B、BN型用于带保温的立式设备。
●支座与筒体连接处是否加垫板,应根据容器材料与支座连接处的强度或刚度决定。
对低温容器的支座,一般要加垫板。
对于不锈钢制设备,当用碳钢制作支座时,为防止器壁与支座在焊接的过程中,不锈钢中合金元素的流失,也需在支座与筒连接处加垫板。
●JB/T4725-92特点:1.考虑支座弯矩对容器圆筒所产生的局部应力,避免筒体由于局部应力过大有可能引起失效。
局部径向弯矩包括设备自重、水平载荷(风载荷或地震载荷)及偏心载荷所产生的弯矩。
2.提出了支座的制造要求,以保证支座的制造质量。
若容器壳体有热处理要求时,支座垫板应在热处理前焊接在器壁上。
压力容器的设计单元十三 压力容器零部件(支座及开孔)52p
B=2d d=接管内径+2C (C=C1+C2)
h 1
dSnt
或实际外伸高度的值较;小
h 2
dSnt
或实际内伸高度的值较;小
等面积补强,纵截面上的投影面积要满足下式:
A1+A2+A3≥A A1—壳体的贡献(有效壁厚减去计算壁厚部分); A2—接管的贡献(有效壁厚减去计算壁厚部分); A3—焊缝金属截面积; A—壳体上需要补强的截面积。(表6-20 P179)
椭圆形人孔(或称长圆形人孔)的最小 尺寸为400mm×300mm。
人孔:筒节、法兰、盖板和手柄。
使用中常打开,可用快开式结构人 孔。
水平吊盖人孔
手孔(HG21515~21527-95) 和人孔(HG21528~2153595)已有标准,
设计时根据设备的公称压力, 工作温度以及所用材料等按 标准直接选用。
(2)加强元件结构 (3)整体补强结构
若须补强的接管较多, 可采取增加壳体壁厚 的办法,也称为整体 补强。
(四).等面积补强的设计方法
1. 开孔有效补强范围及补强面积的计算 等面积补强——补强的金属量等于或大于开孔所
削弱的金属量。 图上看,应该考虑的截面是强度削弱较大的截面
——轴(纵)向截面的面积:
三、手孔与人孔
检查设备内部空间以及安装和拆 卸内部构件。
手孔直径150mm~250mm,标准
手孔公称直径有DN150和 DN250两种。
手孔结构:容器上接一短管,其 上盖一盲板。
人孔:
设备直径超过900mm,有手孔也设 人孔。
人孔的形状有圆形和椭圆形。
椭圆形人孔短轴与筒身轴线平行。
圆形人孔直径400mm~600mm,容 器压力不高或有特殊需要时,直径 可以大一些。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
参考文献 [1]Henry H. Bednar,P.E..Pressure Vessel Design Handbook [2]美国AISC.Manual of Steel Construction [3]孙训方,方孝淑,关来泰.材料力学
六,问题处理
由于支腿的承受轴向应力和弯曲应力的 作用,所以在支腿设计计算时,组合应力达不 能满足要求时,应从这两方面着手,有以下处 理方法:
1 )选用更大截面模量的型钢,以提高 支腿的抗弯能力和承压能力。
2 )增加支腿数量,减少单支腿的轴向 载荷,但增加支腿数量会影响下出料管。
3 )在支腿间增加支撑,减少轴向计算 长度,提高支腿的轴向承压能力。
CT=W T/N 试验状态 面风侧最大的轴向力(拉伸应力)产生
于操作状态或空设备状态,其值为:
T O = (W O / N )+ (4 M b / N D b ) 操作 状态
T e= (W e / N )+ (4 M b / N D b) 空 容器状态
支腿顶部的偏心载荷 P1 和 P2,其值为:
参考文献 [1]Highl evela rchitecturer un-timei nfrastructure programmer’s guide[DB/OL].DMSO,1999 [2]李伯虎,柴旭东,毛媛.现代仿真技术发展中 的两个热点-ADS,SBA [J].系统仿真学报, 2001,13(1):101 ̄105 [3]Highl evela rchitecturei nterfaces pecification, Version1.3[DB/OL].http://www.dmso.mil 作者简介 钱进(1 9 8 0 - ),男,硕士,现主要从事装备 综合保障研究。
-282-
式。 2,支腿在危险状态下组合应力 a)操作状态 由轴向力在支腿上产生的应力:f a = C /
A 其中:C —操作状态下作用在一只支腿
上最大轴向压缩载荷,取值为 Co; A —单支腿的面积; 由弯矩在支腿上产生的应力:f b =
(P 1e / W i )+ [ F ( 3 / 4 L ) / W i ] 其中:W i —材料截面抗弯模量 3 / 4 L 是人为选取的。用以反映底部局
3 .结束语
本文提出采用先进的 HLA 仿真体系建立 未来战场环境下的船艇武器系统仿真平台,从 运行结构、开发过程等方面对仿真系统进行整 体描述,从实体设计、想定编辑、联邦成员规 划和效能评估等方面分析系统功能,并明确了 系统联邦成员的划分及任务分配等。平台设计 具备扩展到评估敌我双方实施多武器攻防的能 力,在后续工作中,可以将各种影响因素作为 联邦成员加入联邦,利用其他兵种的仿真应用 和目前的系统仿真,全面考察我船艇武器系统 在真实复杂战场环境下的作战情况。
t
支腿上最大轴向压缩载荷; To —操作状态下面风侧作用在一只支腿
上最大轴向拉伸载荷; Te —容器空重状态下面风侧作用在一只
支腿上最大轴向拉伸载荷; P1 —操作状态下背风侧支腿顶部的偏心
载荷; P2 —操作状态下面风侧支腿顶部的偏心
载荷; Fy —支腿材料的屈服强度。
二,腿式支撑的范围
固定在地面的中小型立式容器,支腿支 撑是常用的支撑方式,一般情况下, 支腿数 量是4个,但根据设计要求,数量也可多于4个, 具体应用范围可按图1。
三,腿式支撑与设备的焊接方法
用于腿式支撑的型钢一般是等边角钢, I型钢或钢管,对角钢或I型钢而言,每种型钢 与容器都有两种焊接方法,如图 2。
虽方法(a)较(b)提供了较大的惯性矩以承 受外部载荷,但由于容器表面的曲率问题,(b) 较(a)在焊接上相对容易,故通常设计或标准中 以方法(b)常用,I型钢常用于相对较大或较重的 容器,对大型贮罐而言,钢管由于其各个方向 特性相同且具有很好的抗扭性能,普遍使用大 型贮罐。
P = (W / N )+ (4 M / N D ) 操作
1
O
a
状态
P1=W T/N 试验状态 P 2 = ( W O / N )+ (4 M a / N D ) 操作状 态
P 2= ( W e/ N )+ (4 M a/ N D ) 空容器状 态
五,支腿的计算
1 ,支腿的计算步骤 a)选取支腿型式和大小 b)校核支腿在危险状态下最大组合应力满 足强度要求,并选取最经济和安全的支腿型
由于水平载荷的作用,如图中 a-a 截面 以上的支腿必然承受由于风载荷或地震载荷而
图1 图2
图3
-281-
基础及前沿研究 中国科技信息 2007 年第 7 期 CHINA SCIENCE AND TECHNOLOGY INFORMATION Apr.2007
产生的弯矩 M b。一般的,对腿式支撑容器, 接管或其他设备的附加弯矩相对较小,可不
四,腿式支撑容器的受力分析
对腿式支撑容器,支腿承受水平与垂直 两个方向的载荷:
垂直载荷来自于设备重量 W ,由全部支 腿均匀承担,各支腿承受轴向力 W / N 。
水平载荷来自于风载荷 P w 和地震载荷 Pe,风载荷和地震载荷计算时都认为是水平方 向,并都假设作用于设备的重心,如图 3。
设置在地震地区的容器,需分别计算风 载荷或地震载荷,取二者的较大值作为作用于 容器重心上的水平载荷,不必考虑二者的叠 加。
做考虑。
同样由于水平载荷的作用,在支腿底部
产生横向剪切力 F,其值为:
F=P(I/ ∑I)
其中I为垂直风或地震方向轴线上单支腿
的截面惯性矩
∑I为垂直风或地震方向轴线上所有支腿
截面惯性矩之和。
由此可得出:
背风侧最大的轴向力(压缩应力)产生于操
作状态或试验状态,其值为:
C O = (W O / N )+ (4 M b / N D b ) 操作 状态
部约束的影响,e 为容器壳体外侧至支腿形心 的距离。
b)试验状态 由轴向力在支腿上产生的应力:fa=QT/
NA 由弯矩在支腿上产生的应力:fb=Q Te /
NWi 支腿上最大组合应力应根据操作状态和
试验状态按下式分别计算,取二者中的大 者,
f=fa+fb 3 ,应用校核 组合应力由轴向压缩应力fa和弯曲应力 fb 两部分组成,此两部分各自的许用应力不 同,一般情况下前者由支腿的细长比决定小 于后者,故若使组合应力f的许用值按前者许 用应力取,则比较保守。常用的方法是按美 国钢结构协会(A I S C )中的方法,即各自 应力对其许用应力的比值之和满足下式: [(fa/Fa)+(fb/Fb)]≤1 a/Fa≤0.15 {(fa/Fa)+[Cmfb/(1-fa/F’e)Fb)]}≤1 fa/Fa > 0.15 Fa—压缩力单独作用时支腿材料许用压 缩应力,与细长比和材料屈服极限Fy 有关,从 AISC 手册查取; Fb—弯曲单独作用时支腿材料的许用弯 曲应力,取 Fb=0.6Fy; F ’e —欧拉应力除以安全系数,与细 长比有关,从从 AISC 手册查取; C m —削弱系数,可保守的取为 1 ; 较好的设计结果应满足公式的左端接近 1。
腿式支撑容器支腿的受力分析
李群 科恩马特殊过程装备(常熟)有限公司 215513
本文提供了腿式支撑的应用范围,详细 分析支腿的受力情况,并提出了支腿计算时强 度不足的处理方法
一,引用符号
D —容器外径; D b —地脚螺栓圆直径; W —容器计算用重量; W e —空容器重量; W O —容器操作重量; W T —容器水压试验时的重量; N —支腿数量; Ma —水平载荷对底封头切线处的弯矩; Ma=PH M b —水平载荷对支腿底部的弯矩; Mb=P(H+L) P —水平载荷;取 P w 和 P e 的较大值; P w —风载荷; P e —地震载荷; H —容器重心至底封头切线的距离; L —下封头切线至支腿底部的距离; Co —操作状态下背风侧作用在一只支腿 上最大轴向压缩载荷; C —水压试验状态下背风侧作用在一只
上接第 280 页
控是指在仿真运行过程中对仿真系统中的其他 各个成员的状态进行监视和控制;系统管理 是指完成本仿真系统管理计算机的功能,进 行仿真系统初始化参数设置、系统运行状态 监视、系统管理和维护。
数据记录联邦成员 数据记录联邦成员旨在开发一个以高层 体系结构(HLA)为规范的、功能强大且灵活 易用的数据记录工具。仿真数据记录联邦成员 分为数据记录计划管理、数据记录控制、接收 数据处理和数据存储四个模块,它采用集中的 数据采集方式,在仿真运行过程中,一直随着 其他成员的运行而运行。 2.5联邦开发相关的系统及工具 开发本联邦所用的操作系统是 Windows XP,开发环境是 JAVA,运行支撑环境 RTI 为 P-RTI。