汽车吊机支腿反力计算及梁板受力分析
汽车吊机支腿反力计算及梁板受力分析
汽车吊机支腿反力计算及梁板受力分析标准化管理处编码[BBX968T-XBB8968-NNJ668-MM9N]附件三:汽车吊机支腿反力计算及梁板受力分析一、模型建立及臂架回转过程受力分析汽车吊机四点支承受力计算模型简图如图1所示,G0为下车重量;G1为上车和吊重的重量和,移到位于对称轴上的回转中心后产生力矩M;e0、e1为G、G1位置到四支腿中心的距离,按对称轴为直角坐标系定位。
R1、R2、R3、R4分别是四支腿的支反力,其中R3、R4为近吊装物处两支腿反力,徐工QY130K汽车起重机支腿间距如图1中,a=,b=。
为简化计算,假设4条支腿支撑在同一水平面内,它们的刚度相同且支撑地面的刚度相同。
1、支点反力计算公式由图1受力简图,分别计算臂架转化来的集中力矩M和吊重P,最后在支腿处迭加,根据受力平衡可得:图1 四支腿反力简图e 0、e1为G、G1位置到四支腿对称中心的距离。
2、计算底盘重心点位置当架吊机设边梁时,所需吊幅最大,为13m,臂长约为,根据额定起重表,幅度14m、臂长最大吊重为>22t,满足起吊要求。
徐工QY130K汽车起重机车长,宽3m,行驶状态车重55t,主要技术参数详见表1。
表1 徐工QY130K汽车起重机主要参数吊机支腿纵向距离,横向距离,支腿箱体位于2桥和3桥之间以及车架后端,工作时配重38000kg 。
根据车轴及转盘中心位置计算吊装下车重心点G 0,尺寸位置关系详见图2,由合力矩确定的平行力系中心即为吊车重心。
图2 车轴及转盘中心位置尺寸由轴重参数得:下车重量G 0=9100+9100+9100+12500+12700+9700=62200 kg上车配重重量=38000 kg上车未加配重时重心到车后边缘距离Rc 为:9700312700 4.412500 5.7591007.62910010.04910011.46622006.78Rc m ⨯+⨯+⨯+⨯+⨯+⨯== 则下车重心G 0到臂架回转中心G 1的纵向距离为工作臂架回转中心G 1到两后支腿的纵向距离为,上车配重及吊重支点G1到支腿对称轴中心O点距离e1=,下车重心G到支腿对称中心O的距离e=。
汽车起重机支腿反力简化计算方法
汽车起重机支腿反力简化计算方法
汽车起重机是一种常见的工程机械,在进行工作时需要支腿起重,以确保机器的稳定性和安全性。
然而,支腿的反力计算一直以来都是一个难题,因为涉及到很多复杂的物理参数和计算公式。
本文介绍一种简化的汽车起重机支腿反力计算方法,以方便工程师和技术人员进行实际操作。
首先,我们需要知道支腿反力的计算公式为F=mg/cosα,其中F 为支腿反力,m为机器重量,g为重力加速度,α为支腿与水平面夹角,cos为余弦函数。
这个公式很简单,但是涉及到很多参数需要精确测量和计算,比如机器重量、支腿数量和位置、支腿与地面的夹角等等。
这些参数往往需要现场测量,而且误差可能很大,因此计算反力的结果往往不够准确。
为了简化计算,我们可以采用一种近似的方法,即假设支腿反力与机器重量成比例关系,即F=k m,其中k为比例系数。
这个假设的依据是,支腿反力主要是由机器重量产生的,因此反力应该与重量成正比。
这个假设并不完全准确,因为支腿的位置和夹角也会对反力产生影响,但是在一定范围内应该是可行的。
为了确定比例系数k,我们需要进行一些实验。
具体方法是,先测量机器的重量m,然后在支腿下面放置一个称重传感器,用来测量支腿反力F。
然后对机器进行一些不同的运动和工作,比如举起和放下重物,移动位置等等,记录下反力和机器重量的数据。
最后,通过统计分析数据得到比例系数k的值。
这种简化的计算方法有一定的误差,但是可以大大减少现场测量的工作量,同时也可以提高计算的精度。
因此,对于一些实际操作中需要频繁计算支腿反力的场合,这种方法是值得推广和应用的。
汽车起重机支腿反力简化计算方法
汽车起重机支腿反力简化计算方法
汽车起重机是一种常见的工程机械,其支腿反力计算是其中的重要问题。
针对这个问题,本文提出一种简化的计算方法,以提高计算效率和准确度。
首先,我们需要明确汽车起重机支腿反力的概念。
支腿反力是指支腿对地面的反作用力,其大小与支腿的长度、支腿与地面的夹角、支腿和起重机的质量等因素有关。
传统的支腿反力计算方法比较繁琐,需要考虑多个因素,并且涉及到复杂的计算公式。
而本文提出的简化计算方法则可以极大地简化计算过程,使得计算更加方便快捷。
具体而言,我们可以采用以下步骤进行计算:
1. 首先,确定汽车起重机的质量以及支腿的长度和夹角。
2. 然后,将起重机的质量均分到各个支腿上,计算每个支腿上的质量。
3. 接着,根据支腿长度和夹角计算出每个支腿对地面的反作用力。
4. 最后,将各个支腿对地面的反作用力相加,即可得到汽车起重机的支腿反力。
需要注意的是,这种简化计算方法对于支腿长度和夹角相同的情况较为适用,对于长度和夹角不同的情况可能存在一定误差。
总体而言,汽车起重机支腿反力的计算是一项重要的工作,采用简化计算方法可以极大地提高计算效率和准确度。
同时,我们也需要
注意选择合适的计算方法,以满足实际工程需要。
汽车吊机支腿反力计算及梁板受力分析
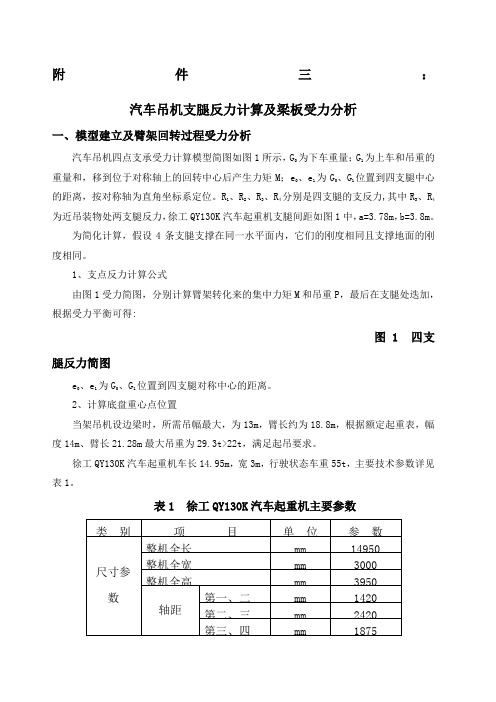
附件三:汽车吊机支腿反力计算及梁板受力分析一、模型建立及臂架回转过程受力分析汽车吊机四点支承受力计算模型简图如图1所示,G0为下车重量;G1为上车和吊重的重量和,移到位于对称轴上的回转中心后产生力矩M;e0、e1为G、G1位置到四支腿中心的距离,按对称轴为直角坐标系定位。
R1、R2、R3、R4分别是四支腿的支反力,其中R3、R4为近吊装物处两支腿反力,徐工QY130K汽车起重机支腿间距如图1中,a=3.78m,b=3.8m。
为简化计算,假设4条支腿支撑在同一水平面内,它们的刚度相同且支撑地面的刚度相同。
1、支点反力计算公式由图1受力简图,分别计算臂架转化来的集中力矩M和吊重P,最后在支腿处迭加,根据受力平衡可得:图 1 四支腿反力简图e 0、e1为G、G1位置到四支腿对称中心的距离。
2、计算底盘重心点位置当架吊机设边梁时,所需吊幅最大,为13m,臂长约为18.8m,根据额定起重表,幅度14m、臂长21.28m最大吊重为29.3t>22t,满足起吊要求。
徐工QY130K汽车起重机车长14.95m,宽3m,行驶状态车重55t,主要技术参数详见表1。
表1 徐工QY130K汽车起重机主要参数吊机支腿纵向距离7.56m ,横向距离7.6m ,支腿箱体位于2桥和3桥之间以及车架后端,工作时配重38000kg 。
根据车轴及转盘中心位置计算吊装下车重心点G 0,尺寸位置关系详见图2,由合力矩确定的平行力系中心即为吊车重心。
图2 车轴及转盘中心位置尺寸由轴重参数得:下车重量G 0=9100+9100+9100+12500+12700+9700=62200 kg 上车配重重量=38000 kg上车未加配重时重心到车后边缘距离Rc 为:9700312700 4.412500 5.7591007.62910010.04910011.46622006.78Rc m ⨯+⨯+⨯+⨯+⨯+⨯==则下车重心G 0到臂架回转中心G 1的纵向距离为6.78-4.9=1.88m工作臂架回转中心G 1到两后支腿的纵向距离为3.63m ,上车配重及吊重支点G 1到支腿对称轴中心O 点距离e 1=0.15m ,下车重心G 0到支腿对称中心O 的距离e 0=1.88-0.15=1.73m 。
汽车吊机支腿反力计算及梁板受力分析
汽车吊机支腿反力计算及梁板受力分析Document serial number【UU89WT-UU98YT-UU8CB-UUUT-UUT108】附件三:汽车吊机支腿反力计算及梁板受力分析一、模型建立及臂架回转过程受力分析汽车吊机四点支承受力计算模型简图如图1所示,G0为下车重量;G1为上车和吊重的重量和,移到位于对称轴上的回转中心后产生力矩M;e0、e1为G、G1位置到四支腿中心的距离,按对称轴为直角坐标系定位。
R1、R2、R3、R4分别是四支腿的支反力,其中R3、R4为近吊装物处两支腿反力,徐工QY130K汽车起重机支腿间距如图1中,a=,b=。
为简化计算,假设4条支腿支撑在同一水平面内,它们的刚度相同且支撑地面的刚度相同。
1、支点反力计算公式由图1受力简图,分别计算臂架转化来的集中力矩M和吊重P,最后在支腿处迭加,根据受力平衡可得:图1 四支腿反力简图e 0、e1为G、G1位置到四支腿对称中心的距离。
2、计算底盘重心点位置当架吊机设边梁时,所需吊幅最大,为13m,臂长约为,根据额定起重表,幅度14m、臂长最大吊重为>22t,满足起吊要求。
徐工QY130K汽车起重机车长,宽3m,行驶状态车重55t,主要技术参数详见表1。
表1 徐工QY130K汽车起重机主要参数吊机支腿纵向距离,横向距离,支腿箱体位于2桥和3桥之间以及车架后端,工作时配重38000kg 。
根据车轴及转盘中心位置计算吊装下车重心点G 0,尺寸位置关系详见图2,由合力矩确定的平行力系中心即为吊车重心。
图2 车轴及转盘中心位置尺寸由轴重参数得:下车重量G 0=9100+9100+9100+12500+12700+9700=62200 kg 上车配重重量=38000 kg上车未加配重时重心到车后边缘距离Rc 为:9700312700 4.412500 5.7591007.62910010.04910011.46622006.78Rc m ⨯+⨯+⨯+⨯+⨯+⨯== 则下车重心G 0到臂架回转中心G 1的纵向距离为工作臂架回转中心G 1到两后支腿的纵向距离为,上车配重及吊重支点G 1到支腿对称轴中心O 点距离e 1=,下车重心G 0到支腿对称中心O 的距离e 0=。
汽车吊机支腿反力计算及梁板受力分析
汽车吊机支腿反力计算及梁板受力分析汽车吊机支腿反力计算及梁板受力分析是对汽车吊机在使用过程中支腿反力的计算及梁板受力情况进行分析和计算的工作。
汽车吊机支腿反力计算是为了确定支腿的尺寸和设计要求,以确保吊机的稳定性和安全性。
梁板受力分析则是为了确定梁板在受力状态下的应力和变形,以评估梁板的结构强度和稳定性。
首先,对于汽车吊机支腿反力计算,需要考虑吊机的整体重量、支腿的长度和间距、支腿材料的强度和刚度等因素。
一般来说,支腿反力需要满足以下几个条件:1.平衡条件:吊机的总重力应该能够通过支腿反力来平衡,即吊机的总重力等于支腿反力的合力。
这可以用力的平衡方程来表示:ΣFy=0,ΣFx=0,ΣM=0。
2.支腿间距条件:支腿的间距应该足够,以保证支腿反力的合力通过支腿的安全性能。
一般来说,支腿的间距应该满足等式w*l≥F,其中w 为吊机的自重压力,l为支腿的间距,F为支腿反力的合力。
3.支腿强度条件:支腿的强度需要满足所受力的要求,主要包括压力和弯矩。
支腿的压力应该满足:P=F/A,其中P为支腿的压力,F为支腿反力的合力,A为支腿的截面面积。
支腿的弯矩应该满足:M=F*l/2,其中M为支腿的弯矩,F为支腿反力的合力,l为支腿的长度。
其次,对于梁板受力分析,需要考虑梁板所受的载荷、梁板的尺寸和截面形状、梁板材料的强度和刚度等因素。
一般来说,梁板受力分析可以采用弹性力学的基本原理,通过受力平衡和变形方程来计算应力和变形。
在梁板的受力分析中,主要需要计算梁板的弯矩、剪力和轴力。
根据梁板的几何形状和所受载荷的位置,可以确定梁板上各点的应力和变形。
在计算弯矩和剪力时,需要考虑横向水平力的作用,以及可能存在的附加载荷。
梁板的弯矩和剪力可以通过弯矩和剪力图来表示,这些图可以根据受力平衡和几何关系来绘制。
弯矩和剪力图可以帮助确定梁板的最大弯矩和剪力位置,以及梁板的强度和稳定性。
最后,对于梁板的应力和变形计算,可以使用弹性力学的基本原理和材料的本构关系来进行。
汽车吊机支腿反力计算及梁板受力分析
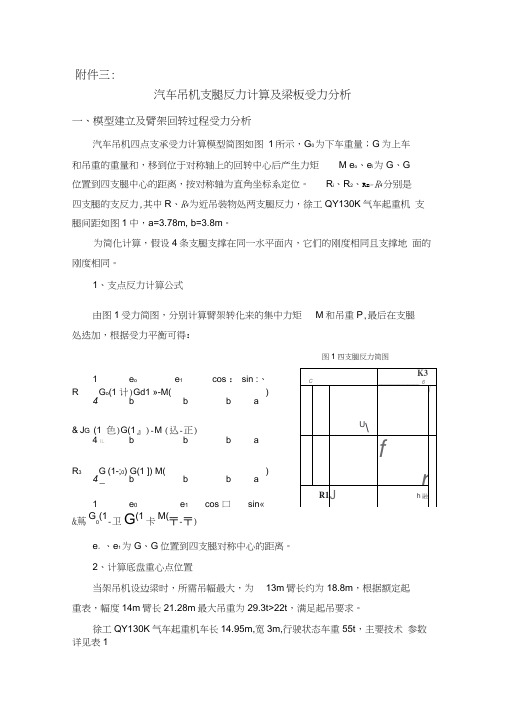
汽车吊机支腿反力计算及梁板受力分析一、模型建立及臂架回转过程受力分析汽车吊机四点支承受力计算模型简图如图 1所示,G 0为下车重量;G 为上车 和吊重的重量和,移到位于对称轴上的回转中心后产生力矩 M e o 、e i 为G 、G 位置到四支腿中心的距离,按对称轴为直角坐标系定位。
R i 、R 2、R B > R 4分别是四支腿的支反力,其中R 、R 4为近吊装物处两支腿反力,徐工QY130K 气车起重机 支腿间距如图1中,a=3.78m, b=3.8m 。
为简化计算,假设4条支腿支撑在同一水平面内,它们的刚度相同且支撑地 面的刚度相同。
1、支点反力计算公式由图1受力简图,分别计算臂架转化来的集中力矩 M 和吊重P ,最后在支腿 处迭加,根据受力平衡可得:1 e o e 1 cos : sin :、RG o (1 计)Gd1 »-M( )4 b bb a& J G °(1 色)G(1』)-M (込-正)4 IL b b b a R 3G °(1-;0) G(1 ]) M( )4 _ b b b a1e 0e 1cos 口sin «&蔦G 0(1-卫G (1卡M(〒-〒)e 。
、e 1为G 、G 位置到四支腿对称中心的距离。
2、计算底盘重心点位置当架吊机设边梁时,所需吊幅最大,为 13m 臂长约为18.8m ,根据额定起 重表,幅度14m 臂长21.28m 最大吊重为29.3t>22t ,满足起吊要求。
徐工QY130K 气车起重机车长14.95m,宽3m,行驶状态车重55t ,主要技术 参数详见表1附件三:图1四支腿反力简图表1 徐工QY130K 气车起重机主要参数类另U 项目单位参数尺寸参数整机全长mm 14950整机全宽mm 3000 整机全高mm 3950轴距第一、二mm 1420第二、三mm 2420第三、四mm 1875第四、五mm 1350第五、六mm 1400重量参数行驶状态整机自重kg 55000 一/二轴kg 9100/9100重量^参数乂三/四轴kg 9100/12500五/六轴kg 12700/9700 支腿距离纵向m 7.56横向m 7.6 转台尾部回转半径(平衡重)mm 4600吊机支腿纵向距离7.56m,横向距离7.6m,支腿箱体位于2桥和3桥之间以及车架后端,工作时配重38000kg。
汽车吊机支腿反力计算及梁板受力分析电子教案
附件三:汽车吊机支腿反力计算及梁板受力分析一、模型建立及臂架回转过程受力分析汽车吊机四点支承受力计算模型简图如图1所示,G 0为下车重量;G 1为上车和吊重的重量和,移到位于对称轴上的回转中心后产生力矩M ;e 0、e 1为G 0、G 1位置到四支腿中心的距离,按对称轴为直角坐标系定位。
R 1、R 2、R 3、R 4分别是四支腿的支反力,其中R 3、R 4为近吊装物处两支腿反力,徐工QY130K 汽车起重机支腿间距如图1中,a=3.78m ,b=3.8m 。
为简化计算,假设4条支腿支撑在同一水平面内,它们的刚度相同且支撑地面的刚度相同。
1、支点反力计算公式由图1受力简图,分别计算臂架转化来的集中力矩M 和吊重P ,最后在支腿处迭加,根据受力平衡可得:图1 四支腿反力简图011011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=++--+⎢⎥⎣⎦012011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=++---⎢⎥⎣⎦ 013011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=-++++⎢⎥⎣⎦ 014011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=-+++-⎢⎥⎣⎦e 0、e 1为G 0、G 1位置到四支腿对称中心的距离。
2、计算底盘重心点位置当架吊机设边梁时,所需吊幅最大,为13m ,臂长约为18.8m ,根据额定起重表,幅度14m 、臂长21.28m 最大吊重为29.3t>22t ,满足起吊要求。
徐工QY130K 汽车起重机车长14.95m ,宽3m ,行驶状态车重55t ,主要技术参数详见表1。
表1 徐工QY130K汽车起重机主要参数类别项目单位参数尺寸参数整机全长mm 14950 整机全宽mm 3000 整机全高mm 3950轴距第一、二mm1420第二、三mm2420第三、四mm1875第四、五1350第五、六1400重量参数行驶状态整机自重kg 55000一/二轴9100/9100 三/四轴五/六轴12700/9700支腿距离纵向m 7.56横向m 7.6 转台尾部回转半径(平衡重)mm 4600吊机支腿纵向距离7.56m,横向距离7.6m,支腿箱体位于2桥和3桥之间以及车架后端,工作时配重38000kg。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
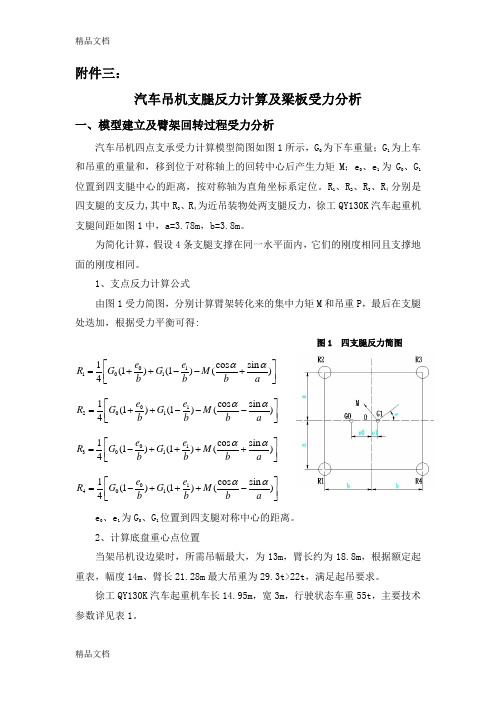
附件三:汽车吊机支腿反力计算及梁板受力分析一、模型建立及臂架回转过程受力分析汽车吊机四点支承受力计算模型简图如图1所示,G 0为下车重量;G 1为上车和吊重的重量和,移到位于对称轴上的回转中心后产生力矩M ;e 0、e 1为G 0、G 1位置到四支腿中心的距离,按对称轴为直角坐标系定位。
R 1、R 2、R 3、R 4分别是四支腿的支反力,其中R 3、R 4为近吊装物处两支腿反力,徐工QY130K 汽车起重机支腿间距如图1中,a=3.78m ,b=3.8m 。
为简化计算,假设4条支腿支撑在同一水平面内,它们的刚度相同且支撑地面的刚度相同。
1、支点反力计算公式由图1受力简图,分别计算臂架转化来的集中力矩M 和吊重P ,最后在支腿处迭加,根据受力平衡可得:图1 四支腿反力简图011011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=++--+⎢⎥⎣⎦012011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=++---⎢⎥⎣⎦ 013011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=-++++⎢⎥⎣⎦ 014011cos sin (1)(1)()4e e R G G M b b b a αα⎡⎤=-+++-⎢⎥⎣⎦e 0、e 1为G 0、G 1位置到四支腿对称中心的距离。
2、计算底盘重心点位置当架吊机设边梁时,所需吊幅最大,为13m ,臂长约为18.8m ,根据额定起重表,幅度14m 、臂长21.28m 最大吊重为29.3t>22t ,满足起吊要求。
徐工QY130K 汽车起重机车长14.95m ,宽3m ,行驶状态车重55t ,主要技术参数详见表1。
表1 徐工QY130K汽车起重机主要参数类别项目单位参数尺寸参数整机全长mm 14950 整机全宽mm 3000 整机全高mm 3950轴距第一、二mm1420第二、三mm2420第三、四mm1875第四、五mm1350第五、六mm1400重量参数行驶状态整机自重kg 55000一/二轴kg 9100/9100 三/四轴kg9100/12500 五/六轴kg12700/9700支腿距离纵向m 7.56横向m 7.6 转台尾部回转半径(平衡重)mm 4600吊机支腿纵向距离7.56m,横向距离7.6m,支腿箱体位于2桥和3桥之间以及车架后端,工作时配重38000kg。
根据车轴及转盘中心位置计算吊装下车重心点G,尺寸位置关系详见图2,由合力矩确定的平行力系中心即为吊车重心。
图2 车轴及转盘中心位置尺寸由轴重参数得:下车重量G 0=9100+9100+9100+12500+12700+9700=62200 kg 上车配重重量=38000 kg上车未加配重时重心到车后边缘距离Rc 为:9700312700 4.412500 5.7591007.62910010.04910011.46622006.78Rc m ⨯+⨯+⨯+⨯+⨯+⨯==则下车重心G 0到臂架回转中心G 1的纵向距离为6.78-4.9=1.88m工作臂架回转中心G 1到两后支腿的纵向距离为3.63m ,上车配重及吊重支点G 1到支腿对称轴中心O 点距离e 1=0.15m ,下车重心G 0到支腿对称中心O 的距离e 0=1.88-0.15=1.73m 。
二 、边梁吊装吊机支腿反力计算边梁重21.97t ,不考虑铺装层,按22t 计算。
1、边梁吊装支腿反力计算由以上计算可知:a=3.8m ,b=3.78m ,e 0=1.73 m ,e 1=0.15m , G 0=622KN,G 1=220+380=600KN ; (1)当а=1060时吊重至臂架回转中心G 1的水平距离为7.01m ,吊重产生的力矩M=6.964×220=1542.6KN ·m ;代入上述公式得:011011cos sin (1)(1)()41 1.730.15cos106sin106622(1)600(1)1542.6()4 3.78 3.78 3.78 3.81(906.7576.2277.7)301.34e e R G G M b b b a KN αα⎡⎤=++--+⎢⎥⎣⎦⎡⎤=++--+⎢⎥⎣⎦=+-= 012011cos sin (1)(1)()41(906.7576.2(502.7))496.44e e R G G M b b b a KN αα⎡⎤=++---⎢⎥⎣⎦=+--=013011cos sin (1)(1)()41(337.3623.8277.7)309.54e e R G G M b b b a KN αα⎡⎤=-++++⎢⎥⎣⎦=++=01401(1)(1)()41(337.3623.8502.7)115.24R G G M b b b a KN =-+-+-⎢⎥⎣⎦=+-=(2)当а=440时吊重至臂架回转中心G 1的水平距离为8.744m ,M=8.882×220=1923.7 KN ·m 。
代入上述公式得:011011cos sin (1)(1)()41 1.730.15cos 44sin 44622(1)600(1)1923.7()4 3.78 3.78 3.78 3.81(906.7576.2717.7)191.34e e R G G M b b b a KN αα⎡⎤=++--+⎢⎥⎣⎦⎡⎤=++--+⎢⎥⎣⎦=+-= 012011cos sin (1)(1)()41(906.7576.214.4)337.14e e R G G M b b b a KN αα⎡⎤=++---⎢⎥⎣⎦=+-=013011cos sin (1)(1)()41(337.3623.8717.7)419.74e e R G G M b b b a KN αα⎡⎤=-++++⎢⎥⎣⎦=++=014011cos sin (1)(1)()41(337.3623.814.4)2444e e R G G M b b b a KN αα⎡⎤=-+++-⎢⎥⎣⎦=++=(3)当а=-220时吊重至臂架回转中心G 1的水平距离为13.8m ,M=13.65×220=3036KN ·m 。
代入上述公式得:011011cos sin (1)(1)()41 1.730.15cos 22sin 22622(1)600(1)3036()4 3.78 3.78 3.78 3.81(906.7576.2445.4)259.44e e R G G M b b b a KN αα⎡⎤=++--+⎢⎥⎣⎦--⎡⎤=++--+⎢⎥⎣⎦=+-= 012011cos sin (1)(1)()41(906.7576.21044.0)109.74e e R G G M b b b a KN αα⎡⎤=++---⎢⎥⎣⎦=+-=01301(1)(1)()41(337.3623.8445.4)351.64R G G M b b b a KN =-++++⎢⎥⎣⎦=++=014011cos sin (1)(1)()41(337.3623.81044)501.34e e R G G M b b b a KN αα⎡⎤=-+++-⎢⎥⎣⎦=++=2、中梁吊装吊机支腿反力计算中梁重19.65t ,不考虑混凝土铺装层残存重量,起吊重量拟按20t 计算。
a=3.8m ,b=3.78m ,e 0=1.73 m ,e 1=0.15m , G 0=622KN,G 1=200+380=580KN ; (1)当а=1060时吊重至臂架回转中心G 1的水平距离为7.01m ,吊重产生的力矩M=7.01×200=1402.6KN ·m ;代入上述公式得:011011cos sin (1)(1)()41 1.730.15cos106sin106622(1)580(1)1402.6()4 3.78 3.78 3.78 3.81(906.7557252.5)302.84e e R G G M b b b a KN αα⎡⎤=++--+⎢⎥⎣⎦⎡⎤=++--+⎢⎥⎣⎦=+-= 012011cos sin (1)(1)()41(906.7557(457.1))480.24e e R G G M b b b a KN αα⎡⎤=++---⎢⎥⎣⎦=+--=013011cos sin (1)(1)()41(337.3603252.5)298.24e e R G G M b b b a KN αα⎡⎤=-++++⎢⎥⎣⎦=++=014011cos sin (1)(1)()41(337.3603457.1)120.84e e R G G M b b b a KN αα⎡⎤=-+-+-⎢⎥⎣⎦=+-=(2)当а=440时吊重至臂架回转中心G 1的水平距离为8.744m ,M=8.744×200=1748.8 KN ·m 。
代入上述公式得:01101(1)(1)()41 1.730.15cos 44sin 44622(1)580(1)1748.8()4 3.78 3.78 3.78 3.81(906.7557652.4)202.84R G G M b b b a KN =++--+⎢⎥⎣⎦⎡⎤=++--+⎢⎥⎣⎦=+-= 012011cos sin (1)(1)()41(906.755713.1)362.74e e R G G M b b b a KN αα⎡⎤=++---⎢⎥⎣⎦=+-=013011cos sin (1)(1)()41(337.3603652.4)398.24e e R G G M b b b a KN αα⎡⎤=-++++⎢⎥⎣⎦=++=014011cos sin (1)(1)()41(337.360313.1)238.44e e R G G M b b b a KN αα⎡⎤=-+++-⎢⎥⎣⎦=++=(3)当а=-170时吊重至臂架回转中心G 1的水平距离为13.5m ,M=13.5×2 00=2700KN ·m 。
代入上述公式得:011011cos sin (1)(1)()41 1.730.15cos 17sin 17622(1)580(1)2700()4 3.78 3.78 3.78 3.81(906.7557475.3)247.14e e R G G M b b b a KN αα⎡⎤=++--+⎢⎥⎣⎦--⎡⎤=++--+⎢⎥⎣⎦=+-= 012011cos sin (1)(1)()41(906.7557890.8)143.24e e R G G M b b b a KN αα⎡⎤=++---⎢⎥⎣⎦=+-=013011cos sin (1)(1)()41(337.3603475.3)353.94e e R G G M b b b a KN αα⎡⎤=-++++⎢⎥⎣⎦=++=01401(1)(1)()41(337.3603890.8)457.84R G G M b b b a KN =-+++-⎢⎥⎣⎦=++=以上各吊装工况下计算各支腿反力如表2所示。