面向智能汽车的测试技术
汽车智能化功能集成测试

汽车智能化功能集成测试概述随着科技的不断进步和应用的发展,智能化功能的集成在汽车行业中变得越来越重要。
汽车智能化功能集成测试是确保汽车智能化功能的可靠性和稳定性的关键过程。
本文将深入探讨汽车智能化功能集成测试的重要性、测试的目的和方法,并介绍一些常见的智能化功能测试方法。
汽车智能化功能集成测试的重要性汽车智能化功能集成测试是确保汽车智能化系统正常工作的重要环节。
在现代汽车中,智能化功能已经渗透到多个方面,如导航系统、自动驾驶、语音识别、车联网等。
这些智能化功能的正常工作对于驾驶员的安全和行车体验至关重要。
因此,进行全面的集成测试是确保这些功能正常工作的基础。
汽车智能化功能集成测试的主要目的是确保不同的智能化功能能够在同一时间和空间内正常协同工作。
集成测试可以发现不同模块之间的兼容性问题、性能问题和安全问题,并帮助开发人员及时进行修复和优化。
合格的集成测试可以提供高质量、可靠和稳定的智能化汽车产品。
汽车智能化功能集成测试方法功能测试功能测试是集成测试中最基本也是最重要的环节之一,它确保智能化功能的各个模块和组件都能正常工作。
在进行功能测试时,需要根据需求和设计文档编写测试用例,并对每个测试用例进行执行和验证。
常见的功能测试包括:•导航功能测试:测试导航系统的定位准确性、导航路线规划和导航指示的正确性。
•语音识别功能测试:测试语音识别系统的准确性和响应速度。
•自动驾驶功能测试:测试自动驾驶系统的识别能力、规划能力和执行能力。
兼容性测试兼容性测试是测试不同智能化功能模块之间的兼容性和协同工作能力。
在进行兼容性测试时,需要模拟不同的场景和情况,并观察各模块之间的相互作用。
常见的兼容性测试包括:•车载设备与手机的兼容性测试:测试汽车中的智能设备与手机的连接和交互能力。
•导航系统与语音识别系统的兼容性测试:测试导航系统与语音识别系统的协同工作能力。
性能测试性能测试是测试智能化功能在不同负载和压力下的表现和性能。
第八章 智能网联汽车测试与评价技术 电子课件
2.1相似第一定理
相互相似的物理现象必须遵循相同的客观规律。如果定律可以用方程来表示,那么物
理方程必须是相同的。如果这两种流动现象在机械上相似,那么空间中相应的点和相应的
瞬时物理量彼此成一定比例。这些相似参数的选择不能是任意的,而是符合一定的规律并
相互制约。此外,物理现象中的相似性准则在不同的时间和不同的空间位置具有不同的值,
评价则是对一个人或者事进行判断,分析后的结果。构建智能驾驶测试与评价体系,可以全
可以全面系统的评价智能汽车的性能,为研发与生产提供方向。
面系统的评价智能汽车的性能,为研发与生产提供方向。
测评的分类
在进行测试和评价时,需要研究测评目的。可以根据测评对象对汽车的测评目的进行分
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备和合理的实验方法进
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备
测试是指具有实验性的测量,它的基本目标就是获取有用的测量信息,借助仪器、设备和合理的实验方法进
和合理的实验方法进行信号分析和数据处理。
行信号分析和数据处理。评价则是对一个人或者事进行判断,分析后的结果。构建智能驾驶测试与评价体系,
场对汽车性能和功能的要求,满足大众汽车对汽车的多样化需求,研发阶段的测试和评估
范围非常广泛。为了适应新技术,特别是当前的汽车智能化和自动化,测试和评估方法需
要不断更新。
8.1.2 通用测试原理
1.测试方案设计方法
常见的试验方案设计方法包括单因素试验方案设计、双因素试验方案设计、疲劳试验
方案设计和寿命试验方案设计等。
验证,提早发现算法中问题和错误,在开发的过程中不断验证。
智能网联汽车(V2X)测试的实践与思考
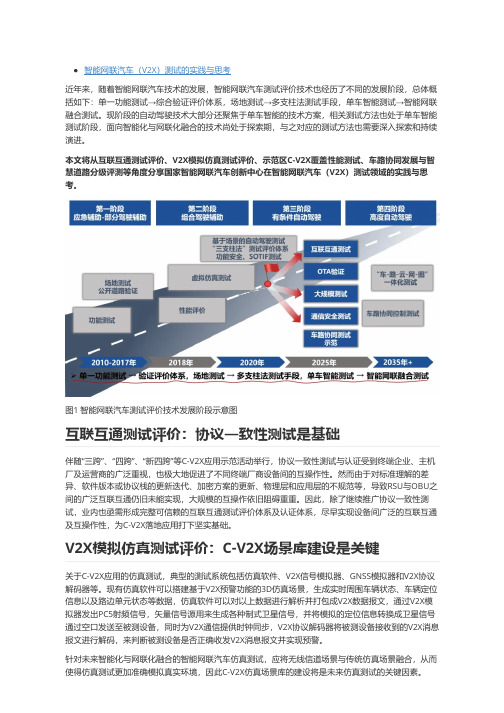
智能网联汽车(V2X)测试的实践与思考近年来,随着智能网联汽车技术的发展,智能网联汽车测试评价技术也经历了不同的发展阶段,总体概括如下:单一功能测试→综合验证评价体系,场地测试→多支柱法测试手段,单车智能测试→智能网联融合测试。
现阶段的自动驾驶技术大部分还聚焦于单车智能的技术方案,相关测试方法也处于单车智能测试阶段,面向智能化与网联化融合的技术尚处于探索期,与之对应的测试方法也需要深入探索和持续演进。
本文将从互联互通测试评价、V2X模拟仿真测试评价、示范区C-V2X覆盖性能测试、车路协同发展与智慧道路分级评测等角度分享国家智能网联汽车创新中心在智能网联汽车(V2X)测试领域的实践与思考。
图1 智能网联汽车测试评价技术发展阶段示意图互联互通测试评价:协议一致性测试是基础伴随“三跨”、“四跨”、“新四跨”等C-V2X应用示范活动举行,协议一致性测试与认证受到终端企业、主机厂及运营商的广泛重视,也极大地促进了不同终端厂商设备间的互操作性。
然而由于对标准理解的差异、软件版本或协议栈的更新迭代、加密方案的更新、物理层和应用层的不规范等,导致RSU与OBU之间的广泛互联互通仍旧未能实现,大规模的互操作依旧阻碍重重。
因此,除了继续推广协议一致性测试,业内也亟需形成完整可信赖的互联互通测试评价体系及认证体系,尽早实现设备间广泛的互联互通及互操作性,为C-V2X落地应用打下坚实基础。
V2X模拟仿真测试评价:C-V2X场景库建设是关键关于C-V2X应用的仿真测试,典型的测试系统包括仿真软件、V2X信号模拟器、GNSS模拟器和V2X协议解码器等。
现有仿真软件可以搭建基于V2X预警功能的3D仿真场景,生成实时周围车辆状态、车辆定位信息以及路边单元状态等数据,仿真软件可以对以上数据进行解析并打包成V2X数据报文,通过V2X模拟器发出PC5射频信号,矢量信号源用来生成各种制式卫星信号,并将模拟的定位信息转换成卫星信号通过空口发送至被测设备,同时为V2X通信提供时钟同步,V2X协议解码器将被测设备接收到的V2X消息报文进行解码,来判断被测设备是否正确收发V2X消息报文并实现预警。
智能网联汽车仿真测试方法

统的测试方法主要是道路测试和场地测试,但是都面 实传感器的反馈信号,使传感器能在实验室内被激活;
临测试成本高、测试工况少、测试周期长等难题,在开 控制器中包含了智能网联汽车不同系统的不同算法,
[6-7]
发时间、成本、灵活性方面满足不了智能网联汽车复杂 可以在仿真环境中进行验证 。
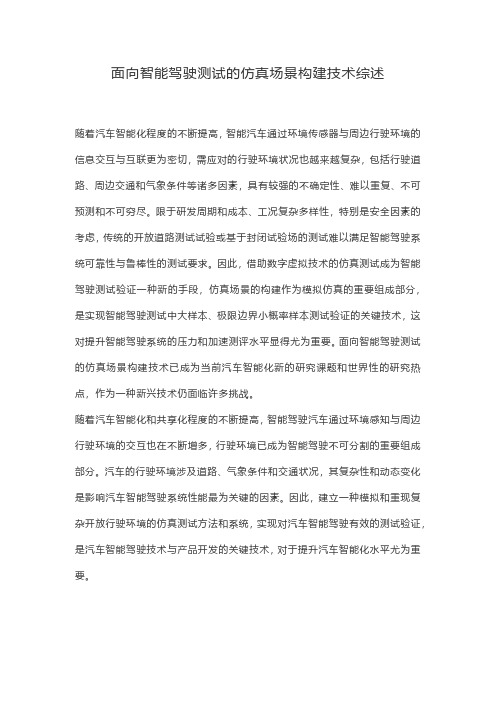
功能的开发验证需求。文章将真实驾驶员、真实传感 器、真实控制器在虚拟仿真环境下深度集成,以丰富的 测试手段、高度逼真的测试场景、高精度的模拟测试设
智能网联汽车是指搭载先进的车载传感器、控制 驶模拟系统模拟了真实车辆的运动,可以进行驾驶员
器、执行器等装置,并融合现代通信与网络技术的新一 主观评价研究;车辆模拟系统模拟了真实车辆的动力
代汽车。由于智能汽车涉及更加复杂的功能和应用,如 学关系,可以进行车辆的性能研究;环境模拟系统模拟
[1-2]
何测试和验证其功能和性能是亟需解决的问题 。传 了真实环境中的各类因素;传感器模拟系统模拟了真
轮胎模型、动力传动系统模型和空气动力学模型等。车 计算数据传递给环境模拟系统,使其中的环境随着车
辆模型在仿真测试中需要快速的计算,并将计算出的 辆模型的运动而变化,另一方面车辆模型计算数据传
车辆响应结果发送到其它控制器中进行相应的计算和 递给驾驶模拟系统,使其按照车辆模型的计算情况进
决策。为了实现快速计算,实时系统是必须要使用到的 行相应的运动。
车辆动力学模型
油门踏板行程 制动踏板行程 转向盘转角 ……
!"# $%&'()'%
实时机
!"# $%&'()'%
主车位移 主车速度 主车加速度 ……
环境模拟系统
图 智能网联汽车仿真测试车辆模型处理平台
面向智能驾驶测试的仿真场景构建技术综述
面向智能驾驶测试的仿真场景构建技术综述随着汽车智能化程度的不断提高,智能汽车通过环境传感器与周边行驶环境的信息交互与互联更为密切,需应对的行驶环境状况也越来越复杂,包括行驶道路、周边交通和气象条件等诸多因素,具有较强的不确定性、难以重复、不可预测和不可穷尽。
限于研发周期和成本、工况复杂多样性,特别是安全因素的考虑,传统的开放道路测试试验或基于封闭试验场的测试难以满足智能驾驶系统可靠性与鲁棒性的测试要求。
因此,借助数字虚拟技术的仿真测试成为智能驾驶测试验证一种新的手段,仿真场景的构建作为模拟仿真的重要组成部分,是实现智能驾驶测试中大样本、极限边界小概率样本测试验证的关键技术,这对提升智能驾驶系统的压力和加速测评水平显得尤为重要。
面向智能驾驶测试的仿真场景构建技术已成为当前汽车智能化新的研究课题和世界性的研究热点,作为一种新兴技术仍面临许多挑战。
随着汽车智能化和共享化程度的不断提高,智能驾驶汽车通过环境感知与周边行驶环境的交互也在不断增多,行驶环境已成为智能驾驶不可分割的重要组成部分。
汽车的行驶环境涉及道路、气象条件和交通状况,其复杂性和动态变化是影响汽车智能驾驶系统性能最为关键的因素。
因此,建立一种模拟和重现复杂开放行驶环境的仿真测试方法和系统,实现对汽车智能驾驶有效的测试验证,是汽车智能驾驶技术与产品开发的关键技术,对于提升汽车智能化水平尤为重要。
汽车行驶环境包括行驶道路、周边交通和气象条件等诸多因素,其高逼真的重现和构建面临诸多挑战。
随着智能驾驶功能的不断增强,汽车需应对的行驶环境越来越复杂,环境高度的不确定性、难以重复、不可预测和不可穷尽等特征使得有限的场地和道路测试远远无法复制、重现或穷举行驶环境对智能驾驶系统的影响。
一方面,限于研发周期和成本,现有的封闭场地测试和开放道路测试不仅周期长、成本高,无法满足对系统数十亿公里行程的大样本和可靠性测试要求。
另一方面,与汽车行驶安全测试密切相关的极限危险工况属于小样本、小概率事件,开放的道路测试往往难以复制,测试安全也无法保障。
智能网联汽车网络安全测试

期望未来智能网联汽车能够实现从云端到终端的全方位网 络安全防护,确保车辆在各种网络环境下的安全性。
跨界合作
希望通过跨界合作,整合产业链各环节的资源和能力,共 同打造智能网联汽车网络安全的产业生态,推动行业持续 创新和发展。
THANKS
感谢观看
评估标准不同
网络安全测试以发现的安 全漏洞和风险为评估依据 ,而传统测试则基于功能 和性能的指标。
03
CATALOGUE
智能网联汽车网络安全测试方法
渗透测试
模拟攻击
渗透测试通过模拟恶意攻击者的 行为,对智能网联汽车的网络系 统进行攻击,以验证系统的安全
性能。
识别漏洞
通过渗透测试,可以识别出智能 网联汽车网络系统中可能存在的
测试目标和期望结果
测试目标
智能网联汽车网络安全测试的目标包括:评估车辆的网络抗攻击能力,检测可 能存在的安全漏洞,验证安全防护机制的有效性,以及提升整体网络安全水平 。
期望结果
通过网络安全测试,期望能够发现并及时修复潜在的安全隐患,减少或避免网 络安全事故的发生。同时,测试结果可为智能网联汽车的网络安全设计和开发 提供有力支持,推动行业网络安全标准的制定和完善。
网络安全测试的重要性
风险与挑战
随着智能网联汽车的普及,网络安全问题日益凸显。未经授 权的访问、恶意攻击和数据泄露等网络安全威胁可能对车辆 控制系统、乘客隐私以及整个交通系统造成严重风险。
测试的必要性
为确保智能网联汽车在网络环境下的安全性和可靠性,必须 进行全面的网络安全测试。这类测试有助于发现潜在的安全 隐患,及时采取防护措施,确保车辆和乘客的安全。
多层防御机制
结合防火墙、入侵检测系统(IDS) 、访问控制等多种技术,构建多层防 御体系。
《智能网联汽车改装与测试技术》毫米波雷达的安装与调试

毫米波雷达的 安装与调试
智能网联汽车改装与测试技术
1 毫米波雷达的工作原理
毫米波雷达简介
毫米波(Millimeter-Wave,MMW)是波长在1mm~10mm之内的电磁波。 频率范围:30 GHz~300 GHz。 性质: 波的频率越高,波长越短,分辨率越高,穿透能力越强,但传输距离较短。 波的频率越低,波长越长,绕射能力越强,传输距离越远。 与其他波的对比: 与微波相比,毫米波具有指向性好、抗干扰能力强和探测性能好的特点。 与红外波相比,毫米波在大气中衰减小,对烟雾和灰尘具有更好的穿透性,受大气影响小。
调频式连续毫米波雷达
脉冲方式测量原理简单,但由于受技术、元器件等方面的 影响,实际应用中很难实现。目前,大多数车载毫米波雷达都 采用调频式连续毫米波雷达。
智能网联汽车改装与测试技术
2 常用毫米波雷达种类
按探测z 测距范围/m 最大视角/(°) 测距精度/m 方位精度/(°) 测速精度/(ms)
毫米波雷达短程探测和远程探测对比示意图 智能网联汽车改装与测试技术
ICV Intelligent & Connected Vehicle
谢谢观看
智能网联汽车改装与测试技术
短程毫米波雷达 24 4
0.15~60 ±80 ±0.02 ±1 0.1
中程毫米波雷达 76~77 0.6 1~100 ±40 ±0.1 ±0.5 0.1
远程毫米波雷达 77~81 0.6 10~250 ±15 ±0.1 ±0.1 0.1
短程、中程和远程毫米波雷达的技术指标
按探测距离可分为: 近距离(SRR, <60m)
毫米波雷达 中距离(MRR,100m左右)
智能网联汽车信息安全测试
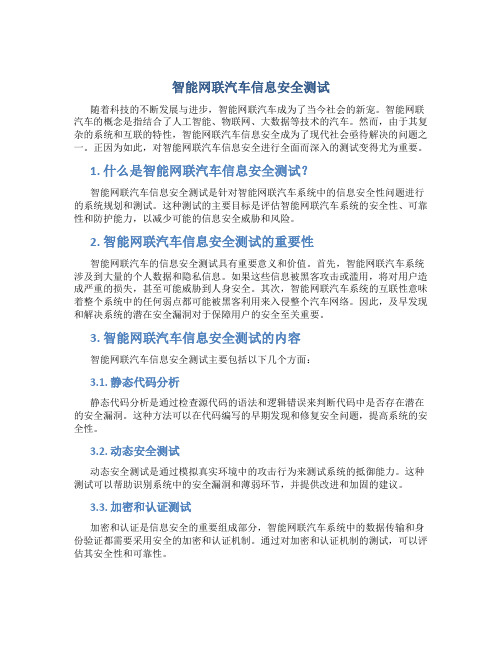
智能网联汽车信息安全测试随着科技的不断发展与进步,智能网联汽车成为了当今社会的新宠。
智能网联汽车的概念是指结合了人工智能、物联网、大数据等技术的汽车。
然而,由于其复杂的系统和互联的特性,智能网联汽车信息安全成为了现代社会亟待解决的问题之一。
正因为如此,对智能网联汽车信息安全进行全面而深入的测试变得尤为重要。
1. 什么是智能网联汽车信息安全测试?智能网联汽车信息安全测试是针对智能网联汽车系统中的信息安全性问题进行的系统规划和测试。
这种测试的主要目标是评估智能网联汽车系统的安全性、可靠性和防护能力,以减少可能的信息安全威胁和风险。
2. 智能网联汽车信息安全测试的重要性智能网联汽车的信息安全测试具有重要意义和价值。
首先,智能网联汽车系统涉及到大量的个人数据和隐私信息。
如果这些信息被黑客攻击或滥用,将对用户造成严重的损失,甚至可能威胁到人身安全。
其次,智能网联汽车系统的互联性意味着整个系统中的任何弱点都可能被黑客利用来入侵整个汽车网络。
因此,及早发现和解决系统的潜在安全漏洞对于保障用户的安全至关重要。
3. 智能网联汽车信息安全测试的内容智能网联汽车信息安全测试主要包括以下几个方面:3.1. 静态代码分析静态代码分析是通过检查源代码的语法和逻辑错误来判断代码中是否存在潜在的安全漏洞。
这种方法可以在代码编写的早期发现和修复安全问题,提高系统的安全性。
3.2. 动态安全测试动态安全测试是通过模拟真实环境中的攻击行为来测试系统的抵御能力。
这种测试可以帮助识别系统中的安全漏洞和薄弱环节,并提供改进和加固的建议。
3.3. 加密和认证测试加密和认证是信息安全的重要组成部分,智能网联汽车系统中的数据传输和身份验证都需要采用安全的加密和认证机制。
通过对加密和认证机制的测试,可以评估其安全性和可靠性。
3.4. 外部接口测试智能网联汽车系统通常与外部设备和平台进行数据交换和通信。
外部接口测试可以确保系统与外部设备的正常通信,并验证传输数据的完整性和准确性。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
单项报告 综合报告 简短格式 Logo调整
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
15
TS6110信息娱乐测试系统
ı 构建研发· 测试平台,你只需要:
根据标准所需的信号搭配硬件设备 配置核心软件R&S ICS 根据标准PKE车身天线
ı 主要用于确定PKE系统的作用距离和范围,并可以分别测试基站和应答器
的射频性能,包括抗干扰能力。
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
16
R&S专业化解决方案-天线测试
ı 车内天线性能测试
Source: Fujitsu
Source: maxim
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
17
R&S专业化解决方案-路试数据存储与回放
32
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
33
智能汽车中的无线信号
WLAN V2X
TPMS,RKE
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
22
车载主动雷达-频率分配
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
23
车载主动雷达
Linear Frequency Modulated Continuous Wave Radar (LFMCW)
GSM CDMA2000 WCDMA LTE
TPMS,RKE
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
3
智能汽车中的无线信号
GPS, 北斗
WLAN V2X
广播/电视 FM,AM,XM,RDS DAB,CMMB
27
车载主动雷达 – 仿真系统ARTS
通过I/Q端口可增加衰落模拟
Original Tx signal
Modified Rx signal
Automotive Radar Sensor
LFMCW = Linear Frequency Modulated Continuous Wave Radar
产生多个目标,仿真距离(延迟)与速度(多普勒),并可通过FSW与SMW 增加失真与衰落模拟
HD Radio Tests
….. Tests FM Tests AM Tests GSM Tests AMP Tests
DAB/DMB Tests
GPS Tests
RDS Tests
CD Tests
MP3 Player Tests
CR Tests
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
19
智能汽车中的无线信号
车载主动雷达 77GHz
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
20
车载主动雷达
Lane-change Assistance
Blind Spot Detection Adaptive Brake Cruise Assistant Control Lane-change Assistance Blind Spot Detection Radar Application Ultrasonic
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
18
TS6110信息娱乐测试系统
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
9
根据需要定制硬件 -CMW500宽带无线通信测试仪
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
10
根据需要定制硬件 -SMBV100信号发生器
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
13
TS6110信息娱乐测试系统
直观易用的软件界面
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
14
TS6110信息娱乐测试系统
直观易用的软件界面
ı 支持打印报告格式调整
5
TS6110信息娱乐测试系统
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
6
TS6110信息娱乐测试系统
Handling of test modules ….. Tests
Bluetooth Tests G2,G3,G4 Tests
beat frequency = Doppler frequency – frequency shift due to signal propagation time
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
21
汽车主动雷达的历史可以追溯到上世纪80 年代 …
Source: Microwave Journal Magazine
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
28
车载主动雷达模拟器–
基本GUI
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
罗德与施瓦茨 面向智能汽车的测试技术
智能汽车
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
2
智能汽车中的无线信号
GPS, 北斗
WLAN V2X
广播/电视 FM,AM,XM,RDS DAB,CMMB 车载主动雷达 77GHz
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
31
车载主动雷达-综合测试系统
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
ı 你将得到:
可重复的高精度测试能力 根据不同信号的自定义限值配置及测试流程 用于认证和计量的标准报告 所有测试原始数据导出Excel表格便于故障追溯
+
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
7
根据需要定制硬件 -CRTA02接口适配器
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
8
根据需要定制硬件
-CBT32蓝牙测试仪
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
34
TPMS测试系统TS7810
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar
35
TPMS
面向只能汽车的测试技术_2015 R&S Intelligent Car and Car Networking Test Technology Seminar