降维状态观测器课件
状态观测器

降维状态观测器及其设计方法(3/18)
首先,对任何输出矩阵为满秩矩阵的状态空间模型,经 过对状态变量的重新排列顺序,都可变换成如下形式 的状态空间模型
1 A11 A12 x1 B1 x u 2 A21 A22 x 2 B2 x y [C C ] x1 1 2 x 2
这里的问题是: 若状态变量x(t)不能完全直接测量到,如何构造一个系 统随时估计该状态变量x(t)。
开环状态观测器(3/6)
该状态估计系统称为开环状态观测器, ˆ ( A, B, C ), 简记为 其结构如下图所示。
u B + + A B + + A
ˆ x
x'
∫
x
C
y
∫
ˆ x
经上述变换后,状态变量 x1 (t ) 所满足的状态方程为 ~ ~ ~ ~ ~ ~ ~ ~ ~ ~ A x x A x B u A x A y B 1 11 1 12 2 1 11 1 12 1u
降维状态观测器及其设计方法(6/18)
仿照前面介绍的全维状态观测器的设计方法,构造状态 变量 x1 (t ) 的全维状态观测器如下: Fz Gy Hu z ˆ1 z Ly x
全维状态观测器及其设计方法(1/1)
4.5.1 全维状态观测器及其设计方法
下面分别介绍 开环状态观测器 渐近状态观测器
开环状态观测器(1/6)
1. 开环状态观测器
设线性定常连续系统的状态空间模型为(A,B,C),即为
x Ax Bu y Cx
在这里设系统的系统矩阵A、输入矩阵B和输出矩阵C都已知。
降维观测器示例

降维观测器示例【例9.48】给定系统1122210011x x u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦,[]1210x y x ⎡⎤=⎢⎥⎣⎦设计此系统的降维观测器,使其极点配置在-5。
解 (1) 判定系统的可观测性 因为 1021C V CA ⎡⎤⎡⎤==⎢⎥⎢⎥-⎣⎦⎣⎦,0V ≠,因此系统可观测。
(2) 取非奇异线性变换矩阵为101011010Q -⎡⎤⎡⎤==⎢⎥⎢⎥⎣⎦⎣⎦利用x Qx =将给定系统化为1122101120x x u x x -⎡⎤⎡⎤⎡⎤⎡⎤=+⎢⎥⎢⎥⎢⎥⎢⎥-⎣⎦⎣⎦⎣⎦⎣⎦,[]1201x y x ⎡⎤=⎢⎥⎣⎦待观测子系统的动态方程为1112222x x uz x x x y y=-+==+=+(3) 已知降维观测器的期望极点为-5,则其期望特征方程为50λ+=。
(4) 设观测器输出反馈系数为H ,降维观测器的特征方程为(1)10H H λλ---=++=(5) 对比(3)、(4)中的方程对应项系数,可得4H =。
(6) 实现先写出降维观测器的动态方程111ˆˆˆˆˆ(), xx u H z z z x =-+--= 应用本例(2)中的结果,上式可化为11ˆˆ548xx u y y =-+++ (9.222) ①变量变换法实现设1ˆ4xw y =+代入式(9.222),有 512w w u y =-+-其状态变量图如9.29所示。
图9.29变量变换法实现的降维状态观测器②结构变换法实现也可对式(9.222)直接应用结构变换法得降维观测器状态变量图如图9.30所示。
图9.30结构变换法实现的降维状态观测器1ˆxsw。
第四章_观测器与动态反馈
1
§4 观测器设计
▪ 4.1 观测器的结构 ▪ 4.2 观测器存在的基本定理 ▪ 4.3 观测器的设计方法 ▪ 4.3.1 全状态观测器 ▪ 4.3.2 降维观测器 ▪ 4.4 带观测器的状态反馈控制器 ▪ 4.5 动态反馈与动态补偿器的设计
2
4.1 观测器的结构
▪ 在实际应用中常遇到不是所有的状态变量都 能用做反馈的情况,有的状态分量根本无法 测量。 ▪ 当系统的状态变量不能全部用做反馈时,可 以考虑输出反馈或者设计观测器估计系统的 状态,然后以系统状态的估计代替系统的状态 进行反馈。
x = Ax + Bu
y
C
u
z = Az + Bu
z (t ) ≈ x (t )
5
2)闭环观测器-根据估计误差修改状态的估计值
为克服开环观测器估计误差较大这一缺点我们设 计闭环观测器,它可以估计误差修改状态的估计 值,从而可以提高对状态估计的精度。
x = Ax + Bu
x
y
C
u
−G
z = A z + B u − G~ y
并计算
g T = [a 0 − α 0 a1 − α 1 a n −1 − α n −1 ]
12
~ g T = g T T −1,式中 第4步 计算
q是( A T , c1T )的能控性矩阵的逆矩阵的最后一行。 第5步
~ ⎡g T ⎤ T T ˆ ˆ ~ G = G + ⎢ ⎥ 或 G = G + [g ⎣0⎦
15
第3步 对 λ1 = −1, λ 2 及 第4步
= −1, λ3 = −2 ,计算多项式
( s + 1) 2 ( s + 2) = s 3 + 4s 2 + 5s + 2 g T = [0 − 6 − 6]
现代控制理论基础_周军_第五章状态反馈与状态观测器
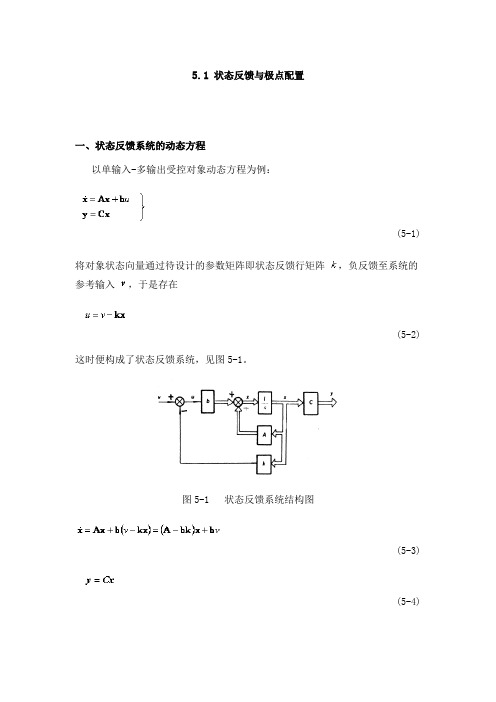
5.1状态反馈与极点配置一、状态反馈系统的动态方程以单输入-多输出受控对象动态方程为例:(5-1)将对象状态向量通过待设计的参数矩阵即状态反馈行矩阵,负反馈至系统的参考输入,于是存在(5-2)这时便构成了状态反馈系统,见图5-1。
图5-1 状态反馈系统结构图(5-3)(5-4)式中v为纯量,为维向量,为维矩阵,为维向量,为维行矩阵,为维向量,为维矩阵。
为闭环状态阵,为闭环特征多项式。
二、用状态反馈使闭环极点配置在任意位置上的充要条件是:受控对象能控证明若式(5-1)所示对象可控,定可通过变换化为能控标准形,有若在变换后的状态空间内引维状态反馈矩阵:(5-5)其中分别为由状态变量引出的反馈系数,则变换后的状态反馈系统动态方程为:(5-6)(5-7)式中(5-8)该式与仍为能控标准形,故引入状态反馈后,系统能控性不变。
特征方程为:(5-9)显见,任意选择阵的个元素,可使特征方程的个系数满足规定要求,能保证特征值(即闭环极点)任意配置。
将逆变换代入式(5-6),可求出原状态空间内的状态反馈系统状态方程:(5-10)与式(5-3)相比,式(5-10)所示对象应引入状态反馈阵为:(5-11)需指出,当受控对象可控时,若不具有能控标准形形式,并不必象如上证明那样去化为能控标准形,只要直接计算状态反馈系统闭环特征多项式,这时,其系数为的函数,与给定极点的特征多项式系数相比较,便可确定。
能控的多输入-多输出系统,经如上类似分析可知,实现闭环极点任意配置的状态反馈阵K为维。
若受控对象不稳定,只要有能控性,完全可由状态反馈配置极点使系统稳定。
状态变量受控情况下,引入状态反馈表示增加一条反馈通路,它能改变反馈所包围环节的传递特性,即通过改变局部回路的极点来改变闭环极点配置。
不能控状态变量与控制量无关,即使引入状态反馈,对闭环极点位置也不会产生任何影响,这是因为传递函数只与系统能控、能观测部分有关的缘故。
若不能控状态变量是稳定的状态变量,那么系统还是能稳定的,否则,系统不稳定。
降维状态观测器课件
闭环传递函数不变性:观测器不改变直接状态反馈系统的
传递函数矩阵 C(sI A BK )1 B C (sI A)1 B
鲁棒性:一般地,鲁棒性变差。
总结
总结
总结
ROB
dim ROB n q # 降维状态观测器在工程实现上比全维状态观测器简便;
# 降维状态观测器在抗噪声方面不及全维状态观测器。
降维状态观测器:综合方案 I
方法1
降维状态观测器:综合方案 I
降维状态观测器:综合方案 I
方案1的降维状态观测器结构图
降维状态观测器:综合方案 I I
方法2(思路类似于全维状态观测器方案2)
降维状态观测器:综合方案 I I
降维状态观测器:综合方案 I I
方案2的降维状态观测器结构图
6.14 Kx―函数观测器
Kx―函数观测器
基本思想
有时重构状态的最终目的是为了获得状态的某种组合如 Kx 的估计。 直接重构 Kx可能使观测器的维数较降维状态观测器的维数更低。
问题描述
给定线性系统
x :n 维 u :p 维 y :q维
Kx―函数观测器的综合算法
Kx―函数观测器组成结构图
Kx―函数观测器组成结构图
6.15 基于观测器的状态反馈控制系统的特性
6.15 基于观测器的状态反馈控制系统的特性
6.15 基于观测器的状态反馈控制系统的特性
基于观测器的状态反馈控制系统的特性
6.15 具有观测器状态反馈控制系统和具有补偿器输出反馈系统的等价性
6.13 降维状态观测器
降维观测器
【国家自然科学基金】_降维状态观测器_基金支持热词逐年推荐_【万方软件创新助手】_20140802
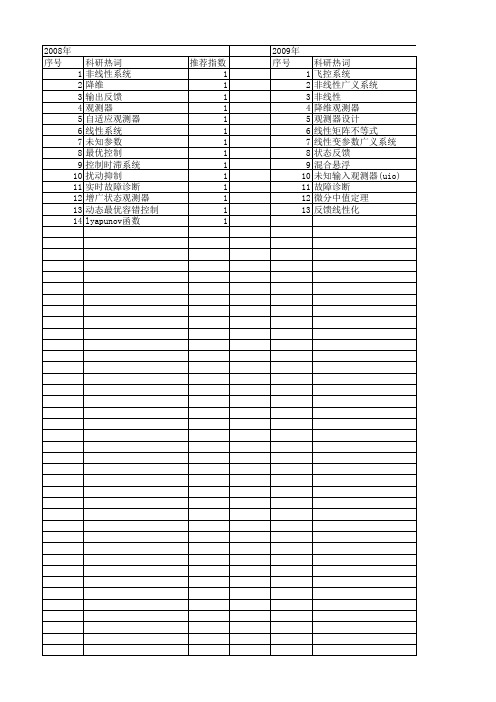
科研热词 非线性系统 降维 输出反馈 观测器 自适应观测器 线性系统 未知参数 最优控制 控制时滞系统 扰动抑制 实时故障诊断 增广状态观测器 动态最优容错控制 lyapunov函数
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2009年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13
科研热词 飞控系统 非线性广义系统 非线性 降维观测器 观测器设计 线性矩阵不等式 线性变参数广义系统 状态反馈 混合悬浮 未知输入观测器(uio) 故障诊断 微分中值定理 反馈线性化
推荐指数 1 1 1 1 1 1 1 1 1 1 1 1 1
2012年 序号 1 2 3 4 5 6 7 8 9 10 11 12
科研热词 高增益观测器 降维观测器 降维状态观测器 观测器匹配条件 起重机吊重系统 状态估计 溶解氧 未知输入估计 未知输入 最优控制 增益 bsm1
推荐指数 2 2 2 2 1 1 1 1 1 1 1 1
2013年 序号 1 2 3 4 5 6 7 8 9 10 11
推荐指数 3 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
2011年 序号 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20
2011年 科研热词 降维性不确定系统 随机非线性系统 降阶 运动同步 输出测量延时 输出反馈 观测器 线性矩阵不等式 离散系统 液压驱动系统 故障重构 故障检测 sylvester方程 lyapunov函数 h∞控制 推荐指数 5 2 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1 1
现代控制理论之状态反馈与状态观测器介绍课件
状态反馈的设计方法
确定系统状态方程
设计状态反馈控制器
计算状态反馈增益矩阵
验证状态反馈控制器的性能
状态反馈的优缺点
优点:能够有效地减小系统的动态响应时间,提高系统的稳定性和动态性能。
优点:可以实现对系统的解耦控制,使得系统的控制更加简单和直观。
现代控制理论之状态反馈与状态观测器介绍课件
演讲人
01.
状态反馈
02.
03.
目录
状态观测器
状态反馈与状态观测器的关系
状态反馈
状态反馈的基本概念
状态反馈是一种控制策略,通过调整系统的状态来达到控制目标。
状态反馈控制器的设计基于系统的状态方程,通过调整输入信号来影响系统的状态。
状态反馈控制器可以改善系统的动态性能,提高系统的稳定性和鲁棒性。
04
状态反馈与状态观测器的区别
状态反馈需要知道系统的模型,状态观测器不需要知道系统的模型
04
状态反馈用于控制系统,状态观测器用于估计系统状态
03
状态观测器:通过观测系统的输出,估计系统的状态
02
状态反馈:通过调整系统的输入,使系统达到期望的状态
01
状态反馈与状态观测器在实际应用中的选择
状态反馈适用于系统模型已知且可控的情况,能够实现最优控制。
02
状态观测器通过测量系统的输入和输出,利用数学模型来估计系统的内部状态。
04
状态观测器在现代控制理论中具有重要地位,广泛应用于各种控制系统的设计与实现。
状态观测器的设计方法
状态观测器性能评估:通过仿真或实验,评估观测器的性能,如观测精度、响应速度等
现代控制理论第五章讲义1

对于q维输出系统,有q个输出变量可直接由 传感器测得,若选取该q个输出作为状态变 量,它们便无需由观测器作出估计,观测器 只需估计(n-q)个状态变量,称为降维观 测器。它是(n-q)维子系统,结构简单, 工程上易于实现。为此,需要由受控对象动 态方程导出(n-q)维子系统动态方程,建 立降维观测器的观测模型。
g1 8.5 3 2 g1 20 2 4 g1 2 g 2 100 g 2 32
状态观测器为
g1 G g2
ˆ ˆ x [ A GC ]x bu Gy ˆ ˆ y Cx
5.5 状态观测器的设计
四、降维观测器
第六节 状态观测器实现状态反馈
在前面几节中,我们讲述了利用状态观测器 解决受控系统的维数重构问题从而使得状态 反馈系统得以实现,本节主要讨论利用观测 器进行状态估值反馈的系统与状态直接反馈 的系统之间的区别。
5.6 利用状态观测器实现状态反馈 一、系统结构与状态空间表达式
在一个带有全 维状态观测器 的状态反馈系 统中,设能控 能观的受控系 统∑0=(A、B、 C)为
* g 0 a 0 a0 * g1 a1 a1 g a* a ˆn n 1 n 1
5.5 状态观测器的设计
例、已知系统 1 1 0 x x 1u 0 2 y 2 0x 试设计一个状态观测器 ,使其极点为- , 10。 10
1
sI A HC
1
1
B 0
C 0
sI A BK B
1
0
C sI A BK B
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
总结
总结
总结
K OB i i
特征值分离性:包含观测器的反馈系统的特征值集合具有 分离性 ( ) {( ), ( )} ( A BK ); ( F )
KB
分离原理:独立地分别设计状态反馈控制律和状态观测器 (引入观测器不影响由状态反馈所配置的特征值,也不影 响已设好的观测器的特征值) 闭环传递函数不变性:观测器不改变直接状态反馈系统的 传递函数矩阵 C (sI A BK ) 1 B C (sI A ) 1 B 鲁棒性:一般地,鲁棒性变差。
Kx―函数观测器的综合算法
Kx―函数观测器的综合算法
Kx―函数观测器的综合算法
Kx―函数观测器的综合算法
Kx―函数观测器组成结构图
Kx―函数观测器组成结构图
6.15 基于观测器的状态反馈控制系统的特性
6.15 基于观测器的状态反馈控制系统的特性
6.15 基于观测器的状态反馈控制系统的特性
基于观测器的状态反馈控制系统的特性
6.15 具有观测器状态反馈控制系统和具有补偿器输出反馈系统的等价性
6.15 具有观测器状态反馈控制系统和具有补偿器输出反馈系统的等价性
总结
包含观测器的状态反馈系统特性
维数增加:引入观测器增加了系统维数;
dim(KB ) dim(0 ) dim(OB )
6.13 降维状态观测器
降维观测器
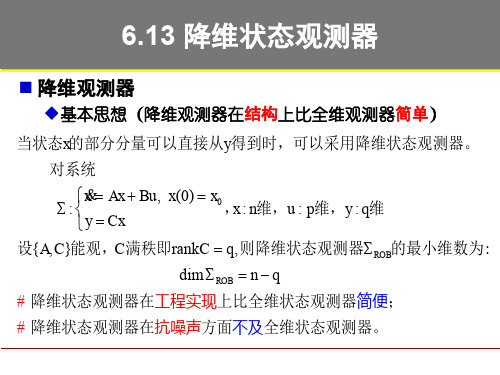
基本思想(降维观测器在结构上比全维观测器简单)
当状态x的部分分量可以直接从y得到时,可以采用降维状态观测器。 对系统 & Ax Bu, x(0) x0 x : , x : n维,u : p维,y : q维 y Cx 设{ A, C}能观,C满秩即rankC q, 则降维状态观测器 ROB的最小维数为: dim ROB n q # 降维状态观测器在工程实现上比全维状态观测器简便; # 降维状态观测器在抗噪声方面不及全维状态观测器。
t
K rn
Kx―函数观测器的条件
结论 对连续时间线性时不变被观测系统,线性时不变系统
可成为Kx-函数观测器即成立的充分必要条件为
Kx―函数观测器的条件
Kx―函数观测器的维数
注记
1)如何确定观测器的维数比较复杂。 当K为向量时可取m 1, 其中 为{ A, C}能观性指数。 2)全维和降维状态观测器是函数观测器的特例。
降维状态观测器:综合方案 I
方法1
降维状态观测器:综合方案 I
降维状态观测器:综合方案 I
方案1的降维状态观测器结构图
降维状态观测器:综合方案 I I
方法2(思路类似于全维状态观测器方案2)
降维状态观测器:综合方案 I I
降维状态观测器:综合方案 I I
方案2的降维状态观测器结构图
6.14 Kx―函数观测器
Kx―函数观测器
基本思想
有时重构状态的最终目的是为了获得状态的某种组合如 Kx 的估计。 直接重构 K题描述
x :n 维 u :p 维 y :q维 z : m 维, 观测器维数m<n w:r维
给定线性系统 & Ax Bu, x(0) x0 x : y Cx, Kx 寻找观测器 & Fz Gy Hu , z (0) z0 z ob : w Mz Ny 使得 lim( w(t ) Kx(t )) 0