三洋驱动器选型手册
三洋伺服Q系列说明书第八章.pdf

8. 参数说明 参 数 说 明 8.1 数位操作器 ………………………………………………………………… 8-2 8.1.1 参数说明 ………………………………………………………… 8-2 8.1.2 功能表 …………………………………………………………… 8-2 8.1.3 操作方法 ………………………………………………………… 8-3 8.1.3.1 状态显示模式………………………………………… 8-3 8.1.3.2 监视模式……………………………………………… 8-4 8.1.3.3 调整和测试操作模式………………………………… 8-7 8.1.3.4 基本模式……………………………………………… 8-12 8.1.3.5 报警记录模式………………………………………… 8-13 8.1.3.6 参数编辑模式………………………………………… 8-14 8.1.3.7 系统参数编辑模式…………………………………… 8-16 8.2 参数总结表 ………………………………………………………………… 8-17 8.3 监视列表 ………………………………………………………………… 8-22 8.3.1 监视 ……………………………………………………………… 8-22 8.4 系统参数和电机参数列表 ………………………………………………… 8-25 8.4.1 系统参数……………………………………………………………… 8-25 8.4.2 电机参数 …………………………………………………………… 8-27 8.5 参数列表……………………………………………………………………… 8-28 8.5.1 第 0 组参数 ………………………………………………………… 8-28 8.5.2 第 1 组参数 ………………………………………………………… 8-32 8.5.3 第 2 组参数 ………………………………………………………… 8-38 8.5.4 第 3 组参数 ………………………………………………………… 8-39 8.5.5 第 4 组参数 ………………………………………………………… 8-47 8.5.6 第 5 组参数 ………………………………………………………… 8-51 8.5.7 第 6 组参数 ………………………………………………………… 8-52 8.5.8 第 7 组参数 ………………………………………………………… 8-53 8.5.9 第 8 组参数 ………………………………………………………… 8-51 8.5.10 第 9 组参数 ………………………………………………………… 8-56 8-18. 参数说明 8.1 数位操作器 该节要说明基本的数位操作器的操作。
三洋伺服驱动第二章
三洋伺服 82893352操作之前2.1开箱时注意事项……………………………………2-22.2产品的确认…………………………………………2-22.3操作时的注意事项…………………………………2-32.4如何阅读型号………………………………………2-62.4.1伺服电机型号………………………………2-62.4.2伺服驱动器型号…………………………2-7 2.5 标准组合………………………………………… 2-8请在操作系统时考虑以下所述的内容。
一个误操作将会导致无法预料的事故或损坏。
2.1 开箱时注意事项当买回产品拆箱取出时,须得注意下列事宜。
·当心该产品,因为电机很重,勿要让它坠地。
2.2 产品的确认收到本产品后,请检查下列事项,若发现有任何异常,请与我们联系。
·请检查该伺服电机和伺服驱动器型号是否为所订购的。
(铭牌上的“Model”后面印有该机的型号)。
·请检查该伺服电机和伺服驱动器表面,确认其没有任何异常,如:破损和部件不齐。
·请检查该伺服电机和伺服驱动器上的螺丝钉是否拧紧。
2.3操作时的注意事项操作时注意下列事项。
·安装时,勿敲击伺服电机和伺服驱动器,否则,它们可能会破损。
在对待伺服电机特别要小心,因为其内有编码器。
·一定得使用指定范围的电源。
200伏交流输入型:200v到230v交流电(+10%,-15%) 50/60 Hz100伏交流输入型:100v到150v交流电(+10%,-15%) 50/60 Hz如果使用的电源不是上述型号,有可能会发生意外。
·当电源中有电压波动时,操作之前可以在电源之间连接一个浪涌吸收器或其他设备,以吸收电压。
否则,会导致出现故障或损坏。
·在维护和检查时,要确保安全状态才打开或关闭电源;如果当电机负载时开关电源,可能引致意外或损坏。
·决不可在易腐蚀性(酸,碱等)、易燃性或易爆性液体或气体处使用此产品,以免其变形或损坏。
三洋伺服Q系列说明书第十一章
表 11-8
延迟时间 tD(S) 10×10-3 10×10-3 10×10-3 24×10-3 24×10-3
11- 7
11 选择项
(2) 动态制动的瞬时阻抗 当负载惯量(JL)超出允许的负载惯量时,动态制动电阻会异常增加,导致过热报警发生或者动 态制动电阻被损坏。如果这种操作条件出现请联系我们。
11.5.2 外再生电阻组合表--------------------------------------------11-15 11.5.3 外再生电阻列表-----------------------------------------------11-15 11.5.4 再生电阻外形图-----------------------------------------------11-18
5.24
7.75×10-7
10.2
7.08×10-7
10.6
3.84×10-7
7.71
4.51×10-7
5.34
6.99×10-7
6.50
6.89×10-7
3.95
3.60×10-7
9.23
1.71×10-7
5.30
1.62×10-7
2.78
1.50×10-7
2.03
0.92×10-7
2.81
3.35×10-7
●基于所使用的电机类型的允许启停频率 启/停频率随着电机的工作条件(包括载荷条件和运转时间在内)的不同而不同。 因此,它不能统一地列出来。 在下面将解释一些典型的例子。
11- 3
11 选择项
(1)当电机重复恒速状态和停止状态时
当运转条件如图 11-2 所示,在电机电枢电流的有效值等于或者低于电机的额定电枢电流(IR) 下,选用一个频率使用电机。
山洋R系列驱动器说明书中文版

˙ػ相ց关ͱ机ͷ械݁的߹结ɾ合ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̒
˙औ允许ڐ承༰受ՙ负ॏ载ɾ ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾɾ·ɾ·ɾ·ɾ·ɾ·ɾ·ɾ·̎ʵ̔
̎ɽ安औ装Γ ͚ <[α伺ʔ服Ϙ驱Ξ动ϯ器ϓ]>
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
SANYO DENKI 010-51298818
ର即ྲྀ使ɼ是对ࣹͳ流Ͳ或ʹ者Α辐Δ射Թ造্成ঢ温͕度ߟ͑的Β上Ε升Δ,߹都Ͱ必须ɺ保αʔ证Ϙ伺Ξ服ϯ驱ϓͷ动ۙ器͘的附ඞͣ近的ˆ温Ҏ度Լʹ在ͳ55Δ℃Α以͏ʹ下͠。
三洋伺服电机RS1快速入门手册29页PPT文档
1.Page00:正转超程功能。 说明:当伺服马达处于正超程状态时,改变设置则可。 0C:当通用输入CONT6为ON时启动该功能 0D:当通用输入CONT6为OFF时启动该功能
2.Page01:反转超程功能。 说明:当伺服马达处于负超程状态时,改变设置则可。 0A:当通用输入CONT5为ON时启动该功能 0B:当通用输入CONT5为OFF时启动该功能
3.Page15: GER1电子齿轮1 。 说明:设定值为初始1:1时,马达转一圈的脉冲是131072个脉
冲。通常将该参数的分子设定为13107,分母设定乘以10即为马 达转一圈的脉冲数。
SMC Pneumatics (H.K.) Ltd.
四.通常参数,第8组参数(图例) 。
SMC Pneumatics (H.K.) Ltd.
2.选择编码器类型。 page 01:00表示增量式的编码器,01表示绝对式的编码器。
3.选择控制方式。一般选择:02。 page 08:00:转矩控制模式,03:速度控制-转矩控制切换 01:速度控制模式,04:位置控制-转矩控制切换 02:位置控制模式,05:位置控制-速度控制切换
4.再生电阻选择。一般选择:00。 page 0b:00:没有连接再生电阻,01:使用内置再生电阻, 02:使用外部再生电阻。
3.Page05:伺服ON功能。改变该值可以选择是否需要伺服ON信号。 说明:02:当通用输入CONT1为ON时启动该功能。 03:当通用输入CONT1为OFF时启动该功能
SMC Pneumatics (H.K.) Ltd.
一.设定通信参数,与伺服马达驱动器连线。
SMC Pneumatics (H.K.) Ltd.
一.设定通信参数,与伺服马达驱动器连线。
三洋R1 R2系列的参数列表和接线图
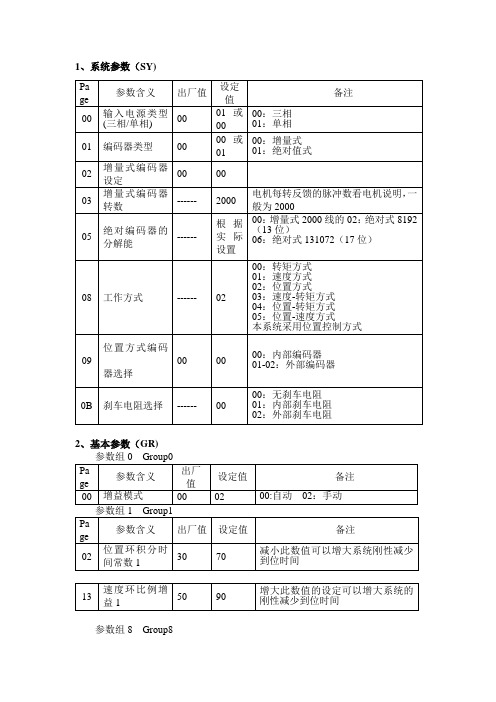
1、系统参数(SY)2、基本参数(GR)参数组8 Group8(二)RS2系列的参数Gr 0.00 设为02 (手动增益模式)Gr 1.02 设为60 (KP1位置环增益值调整)Gr 1.12 设为80 (KVP1速度环增益值调整)Gr 1.13 设为20 (TVI1速度环积分时间常数值调整)Gr 1.14 设为100 (JRAT1负载惯量百分比值调整)Gr 8.00 设为00 (CMDPOL电机旋转方向调整,07为反方向)Gr 8.10 设为00(正反转脉冲),02为脉冲+方向(PMOD位置指令方式选择)Gr 8.12 设为00-07 (位置指令脉冲数字滤波器调整,R电机请设为07)Gr 8.13 设为电子齿轮的分子Gr 8.14设为电子齿轮的分母Gr 8.29设为速度控制模式下电压/转速设定,一般设为200rpm / VGr 9.00 设为0C(正传超程屏蔽)Gr 9.01 设为0A(反传超程屏蔽)Gr 9.05 设为01(SON内部使能)Gr C.04 设为2000/32768(电机转一圈驱动器反馈给上位电脑2000脉冲)Gr C.05 设为驱动器反馈编码器的A和Z相信号的极性Gr C.06 设为00(32768);01(8192)(电机转一圈驱动器可以反馈给上位电脑的脉冲数)Gr C.08 设为01(针对R系列电机)SY01 设为00为3相200V,01为单相200V。
SY02 设为00为不接电阻,01为内置电阻,02为外接电阻。
SY04 设为00(PA_S_2.5M)。
SY05 设为06(131072脉冲)。
SY06 设为00(绝对值编码器)。
SY09 设为01为速度控制模式,02为位置控制模式SY0A 设为00(标准)。
注意:根据电机编码器的类型等实际情况设置参数,以免报警二、操作三、伺服的电源、信号线、UVW、编码器的接线增量式编码器的接线图注意:增量式编码器的24V正负接错的话会出现黑屏,而绝对式编码器24V接反的话会烧坏编码器,所以接线时绝对要注意正负不要接反。
SGD7S~120A00A驱动器说明书手册
SGD7S-120A00A驱动器说明书手册伺服电机(servo motor )是指在伺服系统中控制机械元件运转的发动机,是一种补助马达间接变速装置。
伺服电机可使控制速度,位置精度非常准确,可以将电压信号转化为转矩和转速以驱动控制对象。
伺服电机转子转速受输入信号控制,并能快速反应,在自动控制系统中,用作执行元件,且具有机电时间常数小、线性度高、始动电压等特性,可把所收到的电信号转换成电动机轴上的角位移或角速度输出。
分为直流和交流伺服电动机两大类,其主要特点是,当信号电压为零时无自转现象,转速随着转矩的增加而匀速下降。
中文名伺服电机外文名Servo motor 类型设备使用场合自动控制系统目录1 工作原理2 发展历史3 选型比较4 调试方法5 性能比较6 选型计算7 制动方式8 注意事项9 特点对比10 使用范围11 主要作用12 优点工作原理编辑1、伺服系统(servo mechanism)是使物体的位置、方位、伺服电机状态等输出被控量能够跟随输入目标(或给定值)的任意变化的自动控制系统。
伺服主要靠脉冲来定位,基本上可以这样理解,伺服电机接收到1个脉冲,就会旋转1个脉冲对应的角度,从而实现位移,因为,伺服电机本身具备发出脉冲的功能,所以伺服电机每旋转一个角度,都会发出对应数量的脉冲,这样,和伺服电机接受的脉冲形成了呼应,或者叫闭环,如此一来,系统就会知道发了多少脉冲给伺服电机,同时又收了多少脉冲回来,这样,就能够很精确的控制电机的转动,从而实现精确的定位,可以达到0.001 mm。
直流伺服电机分为有刷和无刷电机。
有刷电机成本低,结构简单,启动转矩大,调速范围宽,控制容易,需要维护,但维护不方便(换碳刷),产生电磁干扰,对环境有要求。
因此它可以用于对成本敏感的普通工业和民用场合。
无刷电机体积小,重量轻,出力大,响应快,速度高,惯量小,转动平滑,力矩稳定。
控制复杂,容易实现智能化,其电子换相方式灵活,可以方波换相或正弦波换相。
三洋伺PY系列服控制器中文手册第五章

• • • • •
5-5
5. 安装
• 不能把连接器朝上安装,只能朝下安装。连接器(引线出口)朝下安装时,请给电缆以 一定松驰度以防止水(油)的侵入。 • 齿轮箱的油面高度要比油封唇部低(该高度只允许油溅到油封唇部上) 。 • 设置通孔以防止齿轮箱内压力升高。
� 相关机械的配合 • 按图 5-8 对电机轴与相关机械进行精密的同心配合。 尤其是使用刚性联接器时,微小偏心也可能造成输出轴受损伤,故务必保证同心。
运转时 轴向负荷(N) F 方向 10 10 10 10 10 50 30 30 30 3 3 3 8 10 20 2 3 3 8 8 8 10 10 10 20 20 20 20 35 50 50 50 50 F1 方向 10 10 10 10 10 50 30 30 30 3 3 3 8 10 20 2 3 3 8 8 8 10 10 10 20 20 20 20 35 50 50 50 50
5-9
5-1
5. 安装
5.1 伺服驱动器安装
参考伺服驱动器安装场所和方法 5.1.1 安装场所 参照下列来安装伺服驱动器。 实 例 注 意 事 项 由于内部机器的电耗及箱体的尺寸因素的 影响,在箱内的温度会比外界的温度高很 多。注意考虑箱的大小、冷却系统及布置方 法,以确保伺服驱动器的周围温度在 55℃ (131℉)以下。 为保证伺服驱动器的寿命和高可靠性, 推荐 箱内温度在 40℃(104℉)以下使用。
图 5-4
5-4
5. 安装
� 防 潮 伺服电机作为一个独立单元,符合 IEC 标准(IEC34-5) 。然而,该标准需在过一段时 间后进行性能检查。下列防潮措施在实际应用中很有必要。小心处理该系统,否则连 接器外壳会受损,降低防水功能。 P8 系列电机和航空插头型的 P1、P2 和 P6 系列电机使用一个防水的连接器或在航空连 接器的另一侧接一个导管,就可等同于 IP67。 P3 系列电机和法兰为 30mm 和 40mm 的 P5 系列电机的防水性等同于 IP40,法兰为 50mm, 70mm 和 80mm 的 P5 系列电机防水性等同 IP55。 连接器(导线出口)向下的角度范围如下图。 防护罩要面向水(油)飞溅方向安装。 防护罩应倾斜,使水(油)不会积滞。 避免电缆浸入水(油)中。 为了不使水侵入电机,防护罩外的电缆要带有一定松弛度。