弹塑性力学-第7章柱体的弹塑性扭转
薄圆筒、柱 弹塑性力学详解

(6 11)
(6 12)
du i d u i ;
vi)弹塑性交界处的连接条件:如果交界面 的法向为ni ,则在 上有: (a)法向位移连续条件 du i (b)应力连续条件
(E)
ni du i ni ;
( p)
( p)
(6 13)
(6 14)
d ij ni d ij ni ;
无量纲化后得到:
(6-19)
d d d , d d 20)
消去 d 得:
(6 21)
简单的弹塑性问题
2 由(6-18)式知 1 及 d d 0,
故
d d d / 1 2
塑性力学
第六章 简单的弹塑性问题
§6.1
弹塑性边值问题的提法
§6.2 “薄壁筒”的拉、扭联合变形
§6.5 “柱体”的弹塑性自由扭转
§6.6 受内压的“厚壁圆筒”
简单的弹塑性问题
§6.1 弹塑性边值问题的提法
一、弹塑性全量理论边值问题
设在物体V内给定体力 Fi ,在应力边界 ST 上给定面力Ti ,在位移 边界Su 上给定位移 u i ,要求应力 ij ,应变 ij ,位移 ui ,它们满足 以下方程和边条件:
(E)
上标(E)和(P)分别表示弹性区和塑性区。
简单的弹塑性问题
§6.2 “薄壁筒” 的 拉、扭变形
考察薄壁圆筒承受拉力P 和扭矩T 联合作用的弹塑性变形问题。采用圆柱坐 标,取z 轴与筒轴重合。设壁厚为h ,筒的内外平均半径为R ,则筒内应力 为:
z P / 2Rh , z T / 2R 2 h,
(6-10)
1 2v d kk d kk , E d d ij 0, 0, ij d hd , d d 0, ij ij
弹塑性力学 第07章平面问题的极坐标解答

ϕ 改变,即与 ϕ 无关。由此可见,凡是轴
对称问题,总是使自变称的 物理量不能存在。
考擦应力函数 U 与 ϕ 无关的一种特殊情况,即轴对称, 此时极坐标形式的双调和方程变成常微分方程 ⎛ ∂2 1 ∂ 1 ∂ 2 ⎞⎛ ∂ 2U 1 ∂U 1 ∂ 2U ⎞ ⎜ ⎜ ∂ρ 2 + ρ ∂ρ + ρ 2 ∂ϕ 2 ⎟ ⎟⎜ ⎜ ∂ρ 2 + ρ ∂ρ + ρ 2 ∂ϕ 2 ⎟ ⎟=0 ⎝ ⎠⎝ ⎠ ⎛ d2 1 d ⎞⎛ d 2U 1 dU ⎞ ⎜ ⎜ d ρ 2 + ρ dρ ⎟ ⎟⎜ ⎜ dρ 2 + ρ dρ ⎟ ⎟=0 ⎝ ⎠⎝ ⎠
τ ρϕ = τ ϕρ
∂ ⎛ 1 ∂U ⎞ 1 ∂ 2U 1 ∂U ⎜ ⎟ =− + 2 =− ⎜ ∂ρ ⎝ ρ ∂ϕ ⎟ ρ ∂ρ∂ϕ ρ ∂ϕ ⎠
¾极坐标系中边界条件的处理: ①、对于由径向线和环向线所围成的弹性体,其边界面通常 均为坐标面,即ρ 面(ρ 为常数)和 ϕ 面(ϕ 为常数),使 边界的表示变得十分简单,所以边界条件也十分简单。 ②、对于应力边界条件,通常给定径向和切向面力值,可直 接与对应的应力分量建立等式(注意符号规定) 应力边界条件:
¾平面问题极坐标形式的几何方程
ερ =
∂u ρ
∂ρ u ρ 1 ∂uϕ εϕ = + ρ ρ ∂ϕ 1 ∂u ρ ∂uϕ uϕ + − γ ρϕ = ρ ∂ϕ ∂ρ ρ
平 面 应 变 问 题
⎧ 1 ⎪ε ρ = (σ ρ −ν 1σ ϕ ) E1 ⎪ ⎪ 1 ⎨ε ϕ = (σ ϕ −ν 1σ ρ ) E1 ⎪ ⎪ 2(1 +ν 1 ) γ τ ρϕ = ⎪ ρϕ E1 ⎩
¾平面问题极坐标形式的物理方程 平 面 应 力 问 题
塑性力学简单的弹塑性问题优秀课件

一、按增量理论求解
对理想弹塑性材料,增量本构方程是 Prandtl-Reuses 关系,于是:
d z
1 E
d z
d
2 3
z
,
1 2
d z
1 2G
dz
d
z
(6-19)
无量纲化后得到:
消去 d 得:
d d d, d d d,
d d d d
(6-20)
(6 21)
由(6-18)式知 1 2 及 d d 0,
路径①沿OBC。在B点有0 0, 0 0。
A
在BC段上有 1 ln1 , 2 1
D ③
解出 e2y 1 tanh ,
e2y 1
O
在C点
e2 e2
1 1
0.76,
1 2 0.65
(6 30)
C ①
B
类似地,对路径②,即阶梯变形路径OAC可求得 0.76和 0.65
路径③是比例加载路径ODC,其上 d d 。在到达D点时,
Tp 2 A pdxdy
6 100
就是截面的塑性极限扭矩。
仍以半径为a的圆柱体为例,它处于全塑性扭转状态时, p 表面必然是一个
圆锥,既然斜率是 s , 高度就应为 sa,按(6-100)式求出
Tp
2 3
sa3.
6 101
与(6-96)式相比可知对圆柱体
Tp / Te 4 / 3.
6 102
塑性力学简单的弹 塑性问题
塑性力学
第六章 简单的弹塑性问题
§6.1 弹塑性边值问题的提法 §6.2 薄壁筒的拉扭联合变形 §6.5 柱体的弹塑性自由扭转 §6.6 受内压的厚壁圆筒 §6.7 旋转圆盘
弹塑性_塑性力学基本方程和解法
在加载过程中物体各点处的偏应力分量 sij 保持比例不变。在工程允许精度下,也可推
广应用于稍为偏离简单加载的情况。
以上各种理论中涉及的一些假设,例如:塑性应变偏量的增在单一的函数关系等假设,都得到了常用金属材
料大量试验的验证。
z 强化规律 对于理想弹塑性材料,材料一旦屈服,其应力状态点在主应力空间中就落在屈服
变形, Hα 也不变,于是
∂f ∂σ ij
除等向强化外,有些强化材料表现为随动强化(图 7.7b),即,在强化过程中,屈
服面的大小和形状保持不变,只随塑性变形的发展而在应力空间中平移。还有些材料
在强化过程中随动强化与等向强化同时发生,称为混合强化。
由于在应力和强化参数空间中,表示应力状态的应力点只可能位于后继屈服面
(或加载面)上或其内,不可能位于曲面之外,若加载面是一个正则曲面,则有
⎯2⎯
研究生学位课弹塑性力学电子讲义
姚振汉
⎧ε = 0 ⎨⎩σ = σ s
当 σ <σs 当 ε >0
(2)
图 7.5 理想弹塑性和刚塑性
当考虑材料强化性质时,可在理想弹塑性模型的基础上加以改进,采用线性强化 弹塑性模型来近似:
⎧σ = Eε
⎨⎩σ = σ s +E1 (ε − εs )
当 ε ≤εs 当 ε >εs
(5)
⎯3⎯
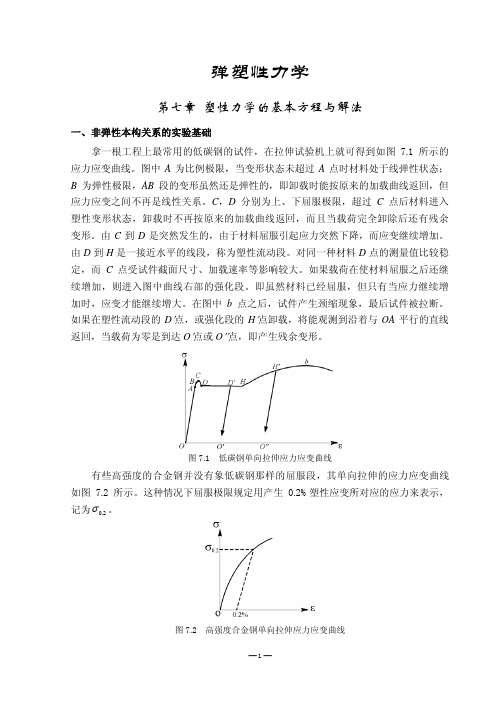
第七章 塑性力学的基本方程与解法
其中 k 可由单向拉伸或其它材料试验测得的σ s 确定, k = σ s 2 。当不能确定主应力的 排序时,在以三个主应力为坐标轴的应力空间中,由特雷斯卡条件所包围的弹性状态 的应力空间为
σ1 −σ 2 ≤ 2k, σ 2 −σ 3 ≤ 2k, σ 3 −σ1 ≤ 2k
弹塑性力学-第7章柱体的弹塑性扭转

第七章柱体的弹塑性扭转第七章等截面柱体的弹塑性扭转在船舶、航空、土建以及机械工程等的机械传动机构中,作为传递扭矩的柱体是个重要的部件。
所谓柱体的扭转,是指圆柱体和棱柱体只在端部受到扭矩的作用,且扭矩矢量与柱体的轴线 z 的方向相重合。
扭转问题属于仅在端面上受力柱体的平衡问题,若严格地满足其边界条件,按弹塑性力学求解是比较困难的。
因此,利用圣维南原理,将边界条件放松,即认为柱体中间截面上的应力仅与端面上外力的合力及合力矩有关,这种放松了边界条件的问题称为圣维南问题。
即使对于圣维南问题,仍需要求解一组偏微分方程,并使其满足一定的边界条件。
但在实用上很少由直接积分其基本方程而得到解答,大部分工程问题用间接的或近似的方法得到。
在间接方法中,圣维南的半逆解法是很重要的。
即先在应力或位移分量中假设一部分未知函数,然后将这部分函数代入基本方程,求得另外一部分的未知函数,并使全部未知函数满足所给定的边界条件,则所假设的和求得的函数即为问题的解。
由于用应力作为基本未知函数用半逆法求解时可以导致比较简单的边界条件,因此求解比较方便。
7.1弹性柱体自由扭转的基本关系式与应力函数解在材料力学中曾经过讨论圆轴的扭转,其特点是扭转变形前后的截面都是圆形,而且每一个截而只作刚体转动,在小变形条件下,没有铀向位移,取坐标系为 x, y, z ,且柱体的轴线为z方向,z方向的位移为w,即w(x, y, z) 0。
这样,变形后截面的半径及圆轴长度基本不变。
非圆形截面柱体的情况要复杂得多。
由于截面的非对称性,在扭转过程中,截面不再保持为平面,而发生了垂直于截面的翘曲变形,即w(x, y, z)0 。
函数w(x, y, z) 称为翘曲函数。
下面讨论任意截面形状的棱柱体扭转基本方程。
设有任意截面形状的等截面棱柱体,柱体两端受纠扭矩 M T作用,如图7.1所示。
1.边界条件对于扭转问题,柱体侧面为自由表面,因此柱体侧面的边界条件为第七章柱体的弹塑性扭转x lxymxy l y m0(7.1-1)zx l zy m0式中 l cos( n, x), m cos( y, n) 。
弹塑性力学第8章—柱体扭转问题

8.2 基本方程
8.2.3 应力法方程
(1)基本方程 平衡方程
⎫ ∂τ zx =0 ⎪ ∂z ⎪ ∂τ zy ⎪ =0 ⎬ ∂z ⎪ ⎪ ∂τ zx ∂τ zy + = 0⎪ ∂x ∂y ⎭
应力表示的应变协调方程 可以由 τ zx 表达式对y微分,减去τ zy 的 表达式对x微分,得到
∂τ zx ∂τ zy − = −2Gθ ∂y ∂x
− y⎟l + ⎜ + x⎟m = 0 ⎜ ⎝ ∂x ⎠ ⎝ ∂y ⎠
将应力表达式代入端部边界条件,3~5式自动成立,第1式
⎧ ⎞⎤ ⎫ ⎪ ∂ ⎡ ⎛ ∂ϕ ⎪ ⎛ ∂ϕ ⎞ ⎞ ⎤ ∂ ⎡ ⎛ ∂ϕ τ θ θ dA G y dxdy G x y x x = − = − + + ⎨ ⎢ ⎜ ⎜ ⎟ ⎟⎥ ⎢ ⎜ ⎥ ⎬ dxdy ⎟ ∫∫ zx ∫∫A ⎝ ∫∫ A ∂x ⎠ ⎠ ⎦ ∂y ⎣ ⎝ ∂y ⎠⎦ ⎪ ⎪ ⎩ ∂x ⎣ ⎝ ∂x ⎭
A A
⎝ ∂x
∂y
⎠
对于柱体横截面是单连通域情况,利用斯托克斯公式,可得
⎛ ∂ψ ∂ψ ⎞ M T = −Gθ ∫∫ ⎜ x+ y ⎟ dxdy A ∂y ⎠ ⎝ ∂x ⎡∂ ⎤ ∂ = −Gθ ∫∫ ⎢ ( xψ ) + ( yψ ) ⎥ dxdy + 2Gθ ∫∫ ψ dxdy A ∂x A ∂y ⎣ ⎦ = −Gθ v ∫ ψ ( xl + ym ) ds + 2Gθ ∫∫ ψ dxdy
i =1 Γi
ki 为Γi边界上的应力函数值。由斯托克斯
公式,有
∫ ?
Γi
ki ( xl + ym ) ds = −> ∫ ki ( xl + ym ) ds = −2 ∫∫ dxdy = −2 Ai
弹塑性力学PPT课件

◆ 应力的表示及符号规则
正应力: 剪应力: 第一个字母表明该应力作用截面 的外法线方向同哪一个坐标轴相 平行,第二个字母表明该应力的 指向同哪个坐标轴相平行。
.
*
③.应力张量
数学上,在坐标变换时,服从一定坐标变换式 的九个数所定义的量,叫做二阶张量。根据这一定 义,物体内一点处的应力状态可用二阶张量的形式 来表示,并称为应力张量,而各应力分量即为应力 张量的元素,且由剪应力等定理知,应力张量应是 一个对称的二阶张量,简称为应力张量。
以受力物体内某一点(单元体)为研究对象
单元体的受力—— 应力理论; 单元体的变形—— 变形几何理论; 单元体受力与变形 间的关系——本构理 论;
建立起普遍适用的理论与解法。
1、涉及数学理论较复杂,并以其理论与解法的严 密性和普遍适用性为特点; 2、弹塑性力学的工程解答一般认为是精确的; 3、可对初等力学理论解答的精确度和可靠进行度 量。
.
*
①、应力的概念: 受力物体内某点某截面上内力的分布集度
3.应力、应力状态、应力理论
.
*
应力
正应力
剪应力
必须指明两点: 1.是哪一点的应力; 2.是该点哪个微截面的应力。
.
*
②、应力状态的概念:受力物体内某点处所取 无限多截面上的应力情况的总和,就显示和表 明了该点的应力状态
或
07轴的扭转 弹塑性力学讲义
M
Fx t zx
, Fy t zy , Fz 0 y x
x
B y B A y dxdy dx y dy dx B B A dx A A
A
Fx dA 0
y dxdy 0 A
x
1 x y z E 1 y y z x E 1 z z x y E
t zy
Mx Ip
t zx
My Ip
y 0 0 z xy 0 zy t zy Mx G GI p t My zx zx G GI p
2w 1 2 xy G y 2 2w 1 2 xy G x 2 2 2 2G 2 2 x y
2 2G
u v 0 过原点沿 z 向的线段在 xoz、zoy 面内不转动: z z 过原点沿 x 向的线段在 xoy面内不转动: v 0 x 刚体位移为零。
位移分量: u
M v GI p zx w 0
M GI p
yz
M GI p
单位长度的 相对扭转角
0
t zx t zx ( x, y) 存在 ( x, y)
y
t xz t yz z 0 x y z
t zy t zy ( x, y) t zx
t zx ( t zy ) x y
y
( x , y ): 扭 转 应 力
函数( Prandtl )
Fx
Fy
F dA 0
y A
( yF
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
第七章 等截面柱体的弹塑性扭转在船舶、航空、土建以及机械工程等的机械传动机构中,作为传递扭矩的柱体是个重要的部件。
所谓柱体的扭转,是指圆柱体和棱柱体只在端部受到扭矩的作用,且扭矩矢量与柱体的轴线z 的方向相重合。
扭转问题属于仅在端面上受力柱体的平衡问题,若严格地满足其边界条件,按弹塑性力学求解是比较困难的。
因此,利用圣维南原理,将边界条件放松,即认为柱体中间截面上的应力仅与端面上外力的合力及合力矩有关,这种放松了边界条件的问题称为圣维南问题。
即使对于圣维南问题,仍需要求解一组偏微分方程,并使其满足一定的边界条件。
但在实用上很少由直接积分其基本方程而得到解答,大部分工程问题用间接的或近似的方法得到。
在间接方法中,圣维南的半逆解法是很重要的。
即先在应力或位移分量中假设一部分未知函数,然后将这部分函数代入基本方程,求得另外一部分的未知函数,并使全部未知函数满足所给定的边界条件,则所假设的和求得的函数即为问题的解。
由于用应力作为基本未知函数用半逆法求解时可以导致比较简单的边界条件,因此求解比较方便。
7.1 弹性柱体自由扭转的基本关系式与应力函数解在材料力学中曾经过讨论圆轴的扭转,其特点是扭转变形前后的截面都是圆形,而且每一个截而只作刚体转动,在小变形条件下,没有铀向位移,取坐标系为z y x ,,,且柱体的轴线为z 方向,z 方向的位移为w ,即0),,(=z y x w 。
这样,变形后截面的半径及圆轴长度基本不变。
非圆形截面柱体的情况要复杂得多。
由于截面的非对称性,在扭转过程中,截面不再保持为平面,而发生了垂直于截面的翘曲变形,即0),,(≠z y x w 。
函数 ),,(z y x w 称为翘曲函数。
下面讨论任意截面形状的棱柱体扭转基本方程。
设有任意截面形状的等截面棱柱体,柱体两端受纠扭矩T M 作用,如图7.1所示。
1. 边界条件对于扭转问题,柱体侧面为自由表面,因此柱体侧面的边界条件为⎪⎭⎪⎬⎫=+=+=+000m l m l m l zy zx y xy xy x ττσττσ (7.1-1)式中),cos(),,cos(n y m x n l ==。
图7.1 棱柱体的扭转在端部边界条件为⎪⎪⎪⎭⎪⎪⎪⎬⎫====-==⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰⎰00,0)(0,0ydA xdA dA M dA y x dA dA z zz T zx zy zy zx σσσττττ (7.1-2) 2.柱体扭转时的位移与应变对于柱体扭转问题,圣维南半逆解法假设:(1)认为截面的翘曲变形与z 轴无关,即各截面们翘曲程度相同。
(2)柱体发生扭转变形时,截面仅仅产生绕z 轴的刚体转动,且间矩为单位长度的两截面的相对扭转角(扭率)θ为常数。
因此,由假设(1)可知,翘曲函数w 仅为y x ,的函数;又由假设(2) 可知,翘曲函数必与祟函数戏正比,即),(y x w θψ= (7.1-3) 再由假设(2),如果令距坐标原点为z 处截面相对0=z 截面的扭转角为z θ,则该截面上距扭转中心A 为r 的任一点扭转后移至),,('z v y u x P +-(图7.2),由于0=z 处截面没有转动,只有翘曲,因此P 点在y x ,方向的),,.(z y x P 位移分量为⎭⎬⎫==-=-=z x z r v z y z r u θαθθαθcos )(sin )( (7.1-4) 式中α为AP 与x 轴之间的夹角。
由于截面总扭转角 图7.2扭转变形的位移 与该截面至坐标原点的距离成正比,故AP 的转角为z θ。
将式(7.1-3)和式(7.1-4)代入应变位移关系,可得一点的应变为⎪⎭⎪⎬⎫+∂∂=-∂∂=====)()(00x y ,y x ,zyzx xy z y x ψθγψθγγεεε (7.1-5) 3.广义虎克定律对于柱体的弹性扭转,根据(7.1-5)式可得应力与应变之间的关系化为 ⎪⎪⎪⎭⎪⎪⎪⎬⎫+∂∂==-∂∂======)()(0x y G G y x G G zy zy zx zx xy z y x ψθγτψθγττσσσ (7.1-6) 由式(7.1-5)和(7.1-6)可见,根据圣维南原理得到:截面上任诃一点都没有正应力,因此各纵向纤维之间和沿各纵向纤维方向均无压了应力;在各截面内(xoy 平面)没有应变,即截面在xoy 坐标面上的投影形状不变。
此外,在截面每一点只有由zx τ和zy τ所确定的纯剪切。
4.平衡方程当不计体力时,平衡方程可由(2.2-2)式化为 ⎪⎪⎪⎭⎪⎪⎪⎬⎫=∂∂+∂∂=∂∂=∂∂000y x z z zy zx zy zx ττττ (7.1-7) 5.应变协调方程将式(7.1-6)中的第二式对y 微分,第三式对x 微分,然后相减,可得用应力表示的两种不同形式的应变协调方程为 ⎪⎪⎭⎪⎪⎬⎫-=∂∂-∂∂=∂∂+∂∂θττψψG x y y x zy zx 202222 (7.1-8) 由上式可知,翘曲函数ψ是调和函数,通常称ψ为圣维南调和函数。
于是,任意截面形状的柱体扭转时的应力,归结为根据边界条件求解(7.1-7),(7.1-8)两式。
6.柱体扭转的应力函数法由于从(7.1-8)式求解翘曲函数ψ通常比较困难,为此,借助应力函数法。
当不计体力时,设应力函数ϕ与应力分量zx τ和zy τ之间的关系为 x y zy zx ∂∂-=∂∂=ϕτϕτ, (7.1-9) 称ϕ为普朗特应力函数。
将式(7.1-9)代入平衡方程式(7.1-7),显然满足。
将它代入应变协调方程(7.1-8)第二式后,得 θϕϕϕG y x 222222-=∂∂+∂∂=∇ (7.1-10) 由此可知,应力函数ϕ应满足上述偏微分方程式(7.1-10)。
这种类型的方程称为泊松方程。
当柱体侧面无面力作用时,则边界条件式(7.1-1)简化为0=+m l zy zx ττ (a)注意到在边界上,)(),(s y y s x x ==,由图7.1可知,当s 增加时,y 增加,而x 减少。
因此,其方向余弦为 ⎪⎪⎭⎪⎪⎬⎫-====ds dx y n m dsdy x n l ),cos(),cos( (b) 将式(7.1- 9)和式(b)代入式(a)后,有0=∂∂=∂∂∂∂+∂∂∂∂ss x x s y y ϕϕϕ (c) 由式(c)可知 =ϕ常数上式说明,沿柱体任意截面的边界曲线,应力函数),(y x ϕ为一任意常数。
对于实心柱体,也即截面为单连通域,由式(7.1-9)知,因剪应力是应力函数的一阶偏导数,所以将常数取为零并不失一般性,即0),(=y x ϕ (沿柱体周边0C ) (7.1-11) 而截面上任一点的合剪应力的为 ngrad x y zy zx ∂∂==∂∂+∂∂=+=ϕϕϕϕτττ2222)()( (7.1-12) 式中n 为沿ϕ等值线的法线方向,τ的方向为沿ϕ等值线的切线方向,因此称ϕ等值线为剪应力线。
由于边界上的剪应力方向必须与边界的切线一致,故周界线0C 本身也是一条剪应力线。
由以上可见,对于给定的θ值,不难由方程(7.1-10)和(a)唯—地确定应力函数),(y x ϕ,从而由式(7.1-9)求出应力,由(7.1-5)求出应变,以及翘曲函数w 。
但我们注意到,由式(7.1-6)和(7.1-9)有x G y z v ,y G x z u zy zx ∂∂-=∂∂+∂∂=∂∂=∂∂+∂∂=ϕψγϕψγ11 从上式可见,当通过积分求位移函数v u ,和翘曲函数w ,则在所得结果中包含有表示刚体位移的积分常数,因此位移函数和翘曲函数可准确到一个附加常数的范围内。
根据上面所述方法求得的应力分布还应满足柱体端部条伴,即 ⎰⎰⎰⎰⎰⎰∂∂-∂∂-=-=A A A zx zy T dxdy yy dxdy x x dxdy y x M ϕϕττ)( (d) 其中积分限A 为截面面积。
对上式做第二个积分利用分部积分,可得dx dy y dy dy y dx dxdy y y A x x y y x x y y y y ⎰⎰⎰⎰⎰⎰⎥⎦⎤⎢⎣⎡-=∂=∂∂2121212121ϕϕϕϕ 注意到在边界侧面上的点21,y y 等0),(=y x ϕ,因此上式的最终结果为 ⎰⎰⎰⎰⎰⎰⎰⎰-=⎥⎦⎤⎢⎣⎡-=∂=∂∂A A x x y y x x y y dxdy dx dy dy dyy dx dxdy y y ϕϕκϕ21212121 (e) 同理,第一个积分也可写为 ⎰⎰⎰⎰-=∂∂A A dxdy dxdy xx ϕϕ (f) 将式(e)、(f)代入式(d),最后得⎰⎰=AT dxdy M ϕ2 (7.1-13) 上式表示,如在截面上每一点有一个),(y x ϕ值,则扭矩T M 为ϕ曲面下所包体积的二倍。
由以上讨论得出,如能找到一个函数),(y x ϕ,其在边界上的值为零,在截面内满足方程(7.1-10),则截面的剪应力分布及扭矩T M 就都可求得。
7.2 常见截面形状柱体的扭转本节采用应力函数法讨论椭圆形截面和矩形截面两种柱体的扭转。
2.1椭圆形截面柱体的扭转1.应力函数与应力分量截面形状如图7.2所示椭圆柱体,在两端受到扭矩T M ,截面边界方程为 012222=-+by a x (a) 选用应力函数为图7.2 椭圆截面柱体 )1(2222-+=by a x c ϕ (b) 显然,它满足边界条件式(7.1-2)和式(7.1-11)。
式中c 为常数。
将(b)式代入(7.1-2)式得 F b a b a c )(22222+= (c) 于是 )1()(222222222-++=by a x b a F b a ϕ (d) 为了确定常数F ,将式(d)代入式(7.1-13),得 )11()(222222222⎰⎰⎰⎰⎰⎰-++=A A AT dxdy dxdy y b dxdy x a b a F b a M (e) 由于⎪⎪⎪⎭⎪⎪⎪⎬⎫=====⎰⎰⎰⎰⎰⎰A A x A y ab dxdy ab I dxdy y ba I dxdy x πππ443232所以,由(e)式有)(22233b a F b a M T +-=π故可得 332)(2ba b a M F T π+-= (f) 将式(f)代入式(d),应力函数为 )1(2222-+-=by a x ab M T πϕ (7.2-1) 将式(7.2-1)代入式(7.1-9),得剪应力分量 ba x M x ,ab y M y T zy T zx 3322πϕτπϕτ=∂∂-=-=∂∂= (7.2-2) 由(7.1-12)得合剪应力为 4242222b y a x ab M T zy zx +=+=πτττ (7.2-3) 由式(7.2-2)和式(7.2-3)可知,剪应力分布有如下特点:(1)在每一点,应力比值)/)(/(/22x y b a zy zx -=ττ,即沿任意半径方向各点具有相同的比值。