FJ0905舵机实例
舵机原理应用和程序详解
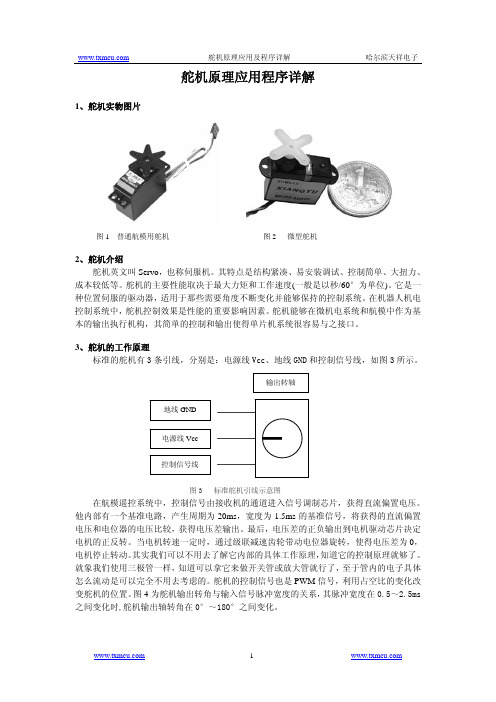
图 2 微型舵机
2、舵机介绍 舵机英文叫 Servo,也称伺服机。其特点是结构紧凑、易安装调试、控制简单、大扭力、
成本较低等。舵机的主要性能取决于最大力矩和工作速度(一般是以秒/60°为单位)。它是一 种位置伺服的驱动器,适用于那些需要角度不断变化并能够保持的控制系统。在机器人机电 控制系统中,舵机控制效果是性能的重要影响因素。舵机能够在微机电系统和航模中作为基 本的输出执行机构,其简单的控制和输出使得单片机系统很容易与之接口。
1
舵机原理应用及程序详解
输入信号脉冲宽度(周期为 20ms)
0.5ms
哈尔滨天祥电子 舵机输出轴转角
0度
1ms
45 度
1.5ms
90 度
2ms
135 度
2.5ms
180 度
图 4 舵机输出转角与输入信号脉冲宽度的关系
4、用单片机实现舵机转角控制 单片机系统实现对舵机输出转角的控制,必须首先完成两个任务:首先是产生基本的
//判断0.5ms次数是否小于角度标识 //确实小于,PWM输出高电平
else
pwm=0; count=(count+1);
//大于则输出低电平 //0.5ms次数加1
count=count%40;
//次数始终保持为40 即保持周期为20ms
} void keyscan()
//按键扫描
{
if(jia==0)
单片机控制单个舵机是比较简单的,利用一个定时器即可,假设仅控制舵机 5 个角度转 动,其控制思路如下:只利用一个定时器 T0,定时时间为 0.5ms,定义一个角度标识,数值 可以为 1、2、3、4、5,实现 0.5ms、1ms、1.5ms、2ms、2.5ms 高电平的输出,再定义一个 变量,数值最大为 40,实现周期为 20ms。每次进入定时中断,判断此时的角度标识,进行 相应的操作。比如此时为 5,则进入的前 5 次中断期间,信号输出为高电平,即为 2.5ms 的 高电平。剩下的 35 次中断期间,信号输出为低电平,即为 17.5ms 的低电平。这样总的时间 是 20ms,为一个周期。
液压舵机的操作实验

实验三液压舵机的操作实验一、实验内容1、液压舵机遥控系统操舵试验与调整。
2. 电子式随动操舵系统操舵实验。
二、实验要求通过实验,熟悉典型液压航机及遥控系统的组成和工作原理,掌握操舵方法。
三、实验设备YD100 -1.6 / 28型液压舵机1套D D1型电子随动操舵仪1台(一)YD100 - 1.6 / 28型液压舵机该舵机由广西梧州华南船舶机械厂制造。
现装于辅机实验室内。
其主要技术数据如下:型号:Y D100- 1.6/ 2 8公称力矩: 1.6 t m(15.6 KN.M)转舵时间:28 sec最大转角正负35度工作压力:100 kg/cm2 (9.81MPa)安全阀调整压力:110kg/cm2 (10.8MPa)电动机型号:JO2H-12-4(Y80L2一4)电动机功率:0.8 kW电动机转速: 1500 r.p.m.电动机电压。
380 V油泵型号;10 SCYI4一1油泵排量;10 m L/r最大工作压力:320 kg/cm2(31.4MPa)电磁阀型号: 34 E 1M-B10H-T电磁阀流量:40L/min电磁阀最大工作压力:210 kg/cm2(20.59 MPa)溢流阀型号:Y E-B10 C电磁阀流量:40 L/min溢流阀最大工作压力:140 kg/cm2(13.73MPa)注:转舵时间系指单机而言,双机组工作时,转舵速度可提高一倍。
1.转舵机构舵机的转舵机构是采用柱塞式油缸,柱塞的往复运动通过拨叉机构转换为舵柄的转动。
所以,舵机的输出力矩与工作油压的关系为(见图3—1)。
πd2R△PM= Z η4 cos2a式中:Z——油缸对数(Z=1)d——柱塞直径(d=10cm)R——舵杆中线到油缸中心线的垂直距离(R=18cm)△P——油缸压差(△P=P1—P2)η——推舵装置机械效率(η≈0.8)a——舵的转角舵机力矩特性M=f(a)如图3—2所示。
舵机公称力矩系指舵机转动舵杆的最大力矩,即舵的转角为35°时舵机的输出力矩。
0805A舵机系统实例说课讲解

Hale Waihona Puke 船舶辅机第8章 舵机 [Steering Gear]
二、阀控型舵机液压系统(HATLAPA –R4V)
7
船舶辅机第8章 舵机 [Steering Gear]
工况选择:
系统图
C1~C4:缸阀(常开) U1~U2:旁通阀(常闭) P1~P4:泵阀(常开)
自动安全切换装置:
两组油缸之间装有自动安全切换装置,可自动 使一对油缸与主泵隔断并彼此旁通,而舵机仍 能继续工作。
8
此课件下载可自行编辑修改,仅供参考! 感谢您的支持,我们努力做得更好! 谢谢!
0805A舵机系统实例
船舶辅机第8章 舵机 [Steering Gear]
一、泵控型舵机液压系统
请打开“0817 泵控型舵 机.swf ”文件观 看动画(鼠标单 击)
2
船舶辅机第8章 舵机 [Steering Gear]
4. 辅油泵的作用 (1)为主油路补油; (2)为主油泵伺服变量机构提供控制油; (3)冷却主泵。
舵机系统实例

3. 补油、放气和压力保护 漏油不可避免,使系统可能产生气穴,流量减 小,噪音增加。可由辅泵或补油柜经过单向阀 补油。 闭式系统放气通过设在高处的方气阀进行。
安全阀的作用:(1)避免油泵过载;(2)舵叶受 冲击时使油路旁通,保护管路和设备。
5
船舶辅机第8章 舵机 [Steering Gear]
4. 辅油泵的作用 (1)为主油路补油;
系统图
自动安全切换装置: 两组油缸之间装有自动安全切换装置,可自动 使一对油缸与主泵隔断并彼此旁通,而舵机仍 能继续工作。
8
船舶辅机第8章 舵机 [Steering Gear]
第五节 舵机液压系统实例 一、泵控型舵机液压系统
二、阀控型舵机液压系统
1
船舶辅机第8章 舵机 [Steering Gear]
一、泵控型舵机液压系统
请打开“0817 泵控型舵 机.swf ”文件 观看动画(鼠标 单击)
2
船舶辅机第8章 舵机 [Steering Gear]
系统图 1. 工况选择 C1~C4:缸阀(常开) 所有1~2构成一个阀块 O1~O4:旁通阀(常闭) 所有3~4构成一个阀块 P1~P4:泵阀(常闭) 某缸故障可与另一不是对角线布置的缸一起停用。 适用于 扭矩 单泵四缸(2) 正常航行 公称转舵扭 矩 双泵四缸(1) 进出港 公称转舵扭 矩 单泵双缸(4) 某缸故障 较单泵四缸 减小一半 转舵速度 满足要求(v) 较单泵四缸提 高一倍(2v) 较单泵四缸提 高一倍(2v) 3
船舶辅机第8章 舵机 [Steering Gear]
2. 主油路锁闭
系统图
双联液控单向阀13A、13B,作用是: (1)锁闭备用泵油路,防止备用泵倒流旁通而 妨碍转舵; (2)工作泵回中位时将主油路锁闭,以防跑舵。
液压舵机系统实例.

辅 油 泵 的 作 用
辅泵3是齿轮泵,其 功用如下: (1)为主油路补油。 补油压力由减压阀7 调定为0.8MPa左 右。 (2)为主油泵伺服变 量机构提供控制油。 (3)冷却主泵。
9-5-2 阀控型舵机液压系统
• 采用定量油泵为主油泵 • 使用电气遥控系统操纵电磁换向阀或电液换 向阀,来控制油液流向和转舵方向 • 油路采用
补 油、 放 气 和 压 力 保 护
补油问题:主泵排出 系统在各油缸顶部和油管高处设 侧油液难免有外漏。 放气阀。以便在初次充油或必要 本系统设有辅泵3,经 时放气。 液压系统可以被隔断的各部分都 减压阀7以及单向阀8A、 需要分别设安全阀(15A、15B) 8B向低压侧油路补油。 安全阀的作用是: (1)在转舵时防止油泵排油侧 也可不用辅泵补油, 压力超过最大工作压力过多, 而只设补油柜,以使 以免油泵过载, 在吸入侧压力降低时 (2)在停止转舵时,当海浪或 其它外力冲击舵叶而导致管 进行补油。
图为典型国产泵控型舵机液压系统原理
用斜盘式轴向柱塞变量泵作为主油泵 采用直流伺服电机式电气遥控系统和浮动杆追 随机构
泵 控 型 舵 机 液 压 系 统
泵 控 型 舵 机 液 压 系 统
两台并联主泵,四个柱塞油 缸 工况选择阀采用两个集成阀 块,包括12个单向截止阀 C1~C4 称缸阀,平时常 开, O1~O4 称旁通阀,平时 常闭 P1一P4称泵阀,平时常开 驾驶台随时能启用任一 台泵 只有当主泵损坏需要修 理时才将其一对泵阀关 闭
三、哈特拉伯R4V型舵机液压系统
三、哈特拉伯R4V型舵机液压系统
• 在两组油缸之间装有自动安全切换装置
– 必要时自动使一对油缸与主油路隔断,并彼此旁 通
51单片机控制9g迷你舵机,亲测可用(2)

51单片机控制9g迷你舵机,亲测可用(2)/*为9克迷你舵机量身打造的精简51程序。
开机后舵机有旋转。
之后按下按键key1,舵机开始旋转*//*欢迎志同道合的朋友私信交流*/#include#define uint unsigned int#define uchar unsigned charuchar k; //k表示总时间因为定时器中断要用到k,所以放在程序头sbit PWM1=P1^0;sbit key1=P3^7; //舵机启动开关void init(){TMOD=0X01;TH0=(65536-92)/256;TL0=(65536-92)%256;EA=1;ET0=1;TR0=1;}void jiman20() //51模拟PWM波函数{static uchar flag=0,j=0; //flag当做PWM高电平变宽/变窄的标志;//j表示高电平持续的时间;k表示总时间.因为重复调用该函数if(k==200) //第一步:判断计时满20ms.k=0; //k归零if(flag==0) //标志为0时,高电平标志增加j++;else //标志为1时,高电平标志减小j--;if(j>=25) //当j=25时,高电平持续时间为2.5ms,此时角度为180.flag=1; //必须改变宽/窄标志。
if(j<=0) //当j=0时,高电平持续时间为0ms,此时角度为0.flag=0; //必须改变宽/窄标志。
}if(kPWM1=1; //因为每20ms,k就归0.所以能通过判断k<j,输出高电平else PWM1=0;}void main(){uint i=60000;init();while(i--) //一开机就让舵机有一个转动{jiman20();}while(1){while(key1==0) //当开关打开,启动定时器,进入转动程序并循环TR0=1;jiman20();}TR0=0; //当开关关闭,关闭定时器,舵机保持最末时刻状}}void timer() interrupt 1 //定时器计时0.1ms,即模拟PWM是以0.1s为分度,//高电平逐渐增加/减少{TR0=0;TH0=(65536-92)/256;TL0=(65536-92)%256;TR0=1;k++;}</j,输出高电平。
单片机舵机实例
单片机舵机实例引言:舵机是一种常见的电机,其具有控制角度的特点,被广泛应用于机械臂、机器人、航模等领域。
单片机作为一种重要的控制器件,能够实现对舵机的精确控制。
本文将以一个单片机舵机实例为例,介绍如何通过单片机控制舵机的运动。
一、硬件准备:1. 单片机:选择一款适用的单片机,如STC89C52等。
2. 舵机:选择适用的舵机,可以根据实际需求选择合适的规格和型号。
3. 电源:提供稳定的电源供给舵机和单片机。
二、连接电路:1. 将舵机的信号线连接到单片机的一个IO口上,用于控制舵机的角度。
2. 将舵机的电源线连接到电源正极,将舵机的地线连接到电源负极,确保舵机有足够的电源供给。
三、软件编程:1. 初始化:在程序开始时,需要对单片机进行初始化,包括设置IO口的工作模式、定时器的配置等。
2. 控制舵机:通过向舵机的信号线发送不同的脉冲宽度来控制舵机的角度。
一般来说,舵机的工作范围为0-180度,对应的脉冲宽度为0.5-2.5ms。
通过改变脉冲宽度的值,可以控制舵机在不同角度停留。
3. 控制循环:为了使舵机能够持续运动,可以使用一个循环结构,不断改变舵机的角度,实现舵机的连续运动。
四、实例演示:下面以一个简单的舵机摇头机器人为例,演示如何通过单片机控制舵机的运动。
1. 硬件搭建:将舵机安装在摇头机器人的头部,确保舵机能够自由地摇动。
然后,将舵机的信号线连接到单片机的一个IO口上,将舵机的电源线连接到电源正极,将舵机的地线连接到电源负极。
最后,连接电源,确保舵机和单片机正常工作。
2. 软件编程:使用C语言编写单片机程序,实现舵机的控制。
首先进行初始化设置,包括IO口的配置和定时器的设置。
然后,在控制循环中,通过改变舵机信号线的脉冲宽度,实现舵机的摇头运动。
可以根据需要设置舵机的运动速度和范围,以及摇头的频率和幅度。
3. 运行效果:将程序下载到单片机中,连接电源,摇头机器人的舵机将开始工作。
舵机会根据程序中设定的运动规律,不断摇动头部,实现摇头机器人的动作。
FJ0903转舵机构

船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[4]
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[5]
受力分析
D zpR0m D p R0 M zFQ Rm z m 2 4 cos cos 4 cos
2 2
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[9]
2 滚轮式转舵机构
M zQR0 m
D
4
2
zp cosR0 m
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 10 ]
3 摆缸式转舵机构
1油缸 2活塞杆 3端盖 4活塞 5活塞环 6密封环 7接头
第九章 液压舵机
[ 13 ]
AEG转舵机构结构
1截止阀 2缸体 3转子 4转叶 5定叶 6液压油管路(上、下) 7密封条 8压盖 9密封圈 10固定支架 11衬套 12固定螺栓 13截止阀壳 14截止阀杆。
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 14 ]
船舶辅机
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[1]
第三节 液压舵机的转舵机构 Section 3 Turning mechanics of hydraulic steering gear
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[2]
转舵机构:将液压能转换为机械能,使舵杆和 舵叶转动。
- 1、下载文档前请自行甄别文档内容的完整性,平台不提供额外的编辑、内容补充、找答案等附加服务。
- 2、"仅部分预览"的文档,不可在线预览部分如存在完整性等问题,可反馈申请退款(可完整预览的文档不适用该条件!)。
- 3、如文档侵犯您的权益,请联系客服反馈,我们会尽快为您处理(人工客服工作时间:9:00-18:30)。
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[4]
工况特点和选择
双泵四缸 单泵四缸 单泵双缸
适用于 机动航行 定速航行 应急操舵
扭矩 M 额定扭矩M M/2
转舵速度 2v 额定速度v 2v
某缸故障,可与另一不是对角线布置的缸一起 停用。
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 17 ]
此处无点
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 18 ]
液压联接器结构
1安装活塞 2阀块 3过滤单元 4转子 5轴套 6柱形舵柱 7转子密封 8转舵机构基座 9综合油路 10反馈单元
船舶辅机
Marine Auxiliary Machinery
1主泵 2补油单向阀 3溢流阀主阀 4溢流 阀导阀 5电磁换向 导阀 6液动换向主 阀 7双向溢流阀 8 自动隔离导阀 9自 动隔离主阀 10减压 阀 11蓄能器
[ 11 ]
1 阀控型
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机 2 自动隔离与切换
将漏泄部隔断, 维持工作。 自动隔离阀 导阀8,主阀9 液位开关S1,2 线圈y1,2 隔离旁通 1泵 2缸
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机 3 控制系统
[8]
力矩马达10 伺服滑阀8 差动活塞11 主泵5
手动操作: 9或主泵变量机构
1自动隔离阀 2安全阀 3主油路锁闭阀 4浮子开关 5主泵 6补油单向阀 7辅泵 8先导阀 9位移传感器 10力矩马达 11差动活塞 12辅泵溢流阀 13卸荷电磁阀 SL油箱油位低开关 SLL油箱油位低开关
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[9]
4 辅泵的作用
1.主泵变量控制油 2.液控阀的控制油 3.主油路补油 4.冷却主泵
1自动隔离阀 2安全阀 3主油路锁闭阀 4浮子开关 5主泵 6补油单向阀 7辅泵 8先导阀 9位移传感器 10力矩马达 11差动活塞 12辅泵溢流阀 13卸荷电磁阀 SL油箱油位低开关 SLL油箱油位低开关
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 16 ]
五 变频器控制的转叶舵机(Rolls Royce) 1
4 2 3 6 5 7
1泵单元 2舵柱联接器 3阀 组 4舵柱 5球形转子轴承 6定叶 7转叶
船舶辅机
Marine Auxiliary Machinery
1主泵 2补油单向阀 3溢流阀主阀 4溢流 阀导阀 5电磁换向 导阀 6液动换向主 阀 7双向溢流阀 8 自动隔离导阀 9自 动隔离主阀 10减压 阀 11蓄能器
[ 12 ]
1 阀控型
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机 2 阀控型
[ 13 ]
1变量泵 2控制油 泵 3比例控制阀 4比例方向阀 5防浪阀 6自动隔离阀
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 14 ]
四 阀控型转叶舵机(Porsgrunn)
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 15 ]
l工作油箱 2,16液位开关 3 主油泵 4压差开关 5卸荷溢 流阀的主阀 6卸荷溢流阀的 导阀 7卸荷控制阀 8顺序阀: 9节流阀 10换向阀(液动主阀) 11换向阀的导阀 12截止阀 13储油箱 14加油滤器 15手 摇泵 17膨胀油箱 18截止阀 19,20防浪阀主阀 2l防浪阀 的先导阀 22防浪阀旁通控制 阀 23隔离/旁通阀的控制阀 24隔离旁通阀
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[7]
2 卸载起动、主油路锁闭
主油路锁闭阀3 辅泵7 卸荷电磁阀13 主泵起动时卸载
锁闭备用油路 锁闭工作油路 防止跑舵
1自动隔离阀 2安全阀 3主油路锁闭阀 4浮子开关 5主泵 6补油单向阀 7辅泵 8先导阀 9位移传感器 10力矩马达 11差动活塞 12辅泵溢流阀 13卸荷电磁阀 SL油箱油位低开关 SLL油箱油位低开关
第九章 液压舵机
[5]
二 泵控型川崎舵机
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[6]
1 主油路和工况选择
双向变量主泵5 闭式系统 安全阀2 补油单向阀6,7,a
5种工况 自动隔离阀1 油位控制4
1自动隔离阀 2安全阀 3主油路锁闭阀 4浮子开关 5主泵 6补油单向阀 7辅泵 8先导阀 9位移传感器 10力矩马达 11差动活塞 12辅泵溢流阀 13卸荷电磁阀 SL油箱油位低开关 SLL油箱油位低开关
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[1]
第五节 液压舵机实例 Section 5 Examples of hydraulic steering gear
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[2]
一 泵控型川崎舵机
船舶辅机
第九章 液压舵机
[ 19 ]
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 0 ]
The end of section 5
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机
[ 10 ]
三 哈特拉帕舵机(Hatlapa)
Steering Gear Series POSEIDON
船舶辅机
Marine Auxiliary Machinery
第九章 液压舵机 1 主油路和工况
单向泵1 换向阀5,6 闭式系统 缸阀C1-4 连通阀P1-4 旁通阀U1-2 防浪阀7
Marine Auxiliary Machinery
第九章 液压舵机
[3]
1补油单向阀 2主油路锁闭阀 3主油路安全阀 4手轮 5手动操作杆 6储存弹簧 7主泵控制杆 8浮动杆 9舵柄 10舵角发送器 11辅泵 12溢流阀 13 调速阀 14电磁换向阀 15辅油路锁闭阀 16双向溢流阀 17伺服油缸 18反馈发讯器 D插销孔 P主泵 V连通阀 V旁通阀